1. Introduction
Many ancient heritage sites have undergone numerous transformations over time to such a degree that their archaeological remains have become fragmented. The incompleteness of such monuments and artifacts prevents experts from further studying them. Consequently, the reassembling of fragments is a paramount task not only for research purposes but also for heritage conservation. The broken pieces are typically reassembled based on several factors, such as the place where the fragments were found, the type of decoration, inscriptions content, etc. The task of identifying such matching cues is cumbersome due to the severe damage ancient artifacts have suffered. As a result, archaeological research is delayed since the duration of field digging campaigns is typically rather limited, as is the time allowed in museums or archives to study the assets. Furthermore, manual manipulation might jeopardize the objects’ physical and archaeological integrity. Therefore, experts have resorted to 3D recording technologies to scan the fragments on-site and digitally reassemble them later on in the laboratory. To this end, various digital platforms have been developed to provide restorers with the tools for visualization in 3D space, as well as with tools for seamless alignment [
1]. Although these approaches highly benefit the restoration process, digital puzzling requires specific expertise not only to retrieve potential matching relationships but also to interact with the recorded models. This paper presents a Puzzling Engine that allows both experts and laymen without a specific background to seamlessly interact with the recorded fragments by means of a set of tools for visualization and registration.
This work is an extension of the Puzzling Engine introduced in [
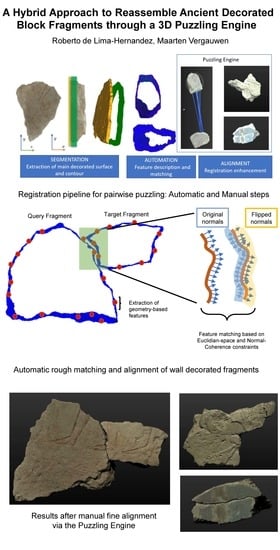
2]. We received an invitation from the organizers of the International Committee of Architectural Photogrammetry (CIPA) symposium to extend the conference paper, which describes a virtual interface that enables experts to reassemble multiple wall broken fragments. Its main characteristics are threefold: (i) The 3D models interaction along a 2D plane, (ii) the contour segmentation that allows to intuitively find common indentation regions between counterpart fragments, and (iii) the registration tools to accurately solve the puzzle. In this extended version, the contour segmentation is improved by incorporating a machine-learning module to extract decorated surfaces. Moreover, computational modules for automatic matching are included so that the engine itself is able to propose potential correspondences between similar fragments. An overview of the computational elements that compose the proposed approach is depicted in
Figure 1. The steps presented in our workflow are adapted from the common pipeline for automatic 3D registration, including segmentation, descriptors extraction, feature matching, and object alignment. The segmentation process mainly aims at delineating the footprint of fractured regions by extracting the area around the main decorated plane. Based on the obtained point-cloud, local features are computed to accurately describe the contour surface in terms of its geometric properties. Along with these features, geometric constraints such as normal coherence are taken into account to estimate a set of consistent correspondences. These matched points serve in two ways: As a visual aid to detect possible joint regions and as a basis to compute a rigid transformation for automatic solving. The proposed pipeline is tested over numerous ancient decorated wall fragments of ancient Egyptian tombs to showcase the potential of the Puzzling Engine. Although the obtaining matching results show that for some pair of fragments the registration pipeline estimates accurate alignments, this approach is not meant to substitute automatic objects reassembling methods. The goal is to complement manual alignment tools with geometry-based matching algorithms to ease the puzzling of tangible heritage.
The key contributions of the presented work are the following.
Extraction of highly damaged wall decorated surfaces by combining machine learning methods and plane-fitting;
Normal Coherence-based adaptations of well-known 3D descriptors and feature correspondence algorithms to tackle the automatic reassembling of digital heritage.
Accurate user-assisted registration of wall broken fragments by means of projecting the input assets into a generic plane so that both objects’ maneuvering and alignment transformations can be carried out in 2D space.
The rest of the paper is organized as follows.
Section 2 gives an overview of the existing approaches for fragments reassembling.
Section 3 describes in detail the proposed methodology from the approach to extract the main decorated surface and fragment’s contour, to the automatic alignment. The main core of the paper’s contribution is presented in
Section 3.2, in which every step of the automatic alignment workflow is explained. The procedure to compute the ground truth metrics and performance assessment of the proposed computational modules are presented in
Section 4. Finally, the conclusion and future work are given in
Section 5.
2. Related Work
With the advent of robust 3D recording technologies and techniques, novel approaches for heritage reassembling have emerged. The accurate geometry of the obtained models has allowed the expansion of algorithmic possibilities to solve cumbersome manual labor. The existing works for archaeological artifacts reassembling in the three-dimensional space are divided into two branches: Computer-assisted and fully-automated approaches. The former aim at providing experts with digital tools to rapidly find matching cues. The latter rely on feature-based correspondence algorithms to automatically register the broken assets. As the proposed work combines components of both, the literature study outlines the significant works of both branches and their differences with the proposed approach.
Computer-assisted reassembling methods support the manual alignment labor by means of a virtual interface, through which users can maneuver the recorded assets in 3D space while identifying potential matching surfaces. To accurately perform this task, researchers have proposed to segment the input data into multiple regions of interest to serve as a basis to easily distinguish matching points. These segmentation algorithms seek to extract geometry-based properties such as curves, normal surfaces, carvings, and so on. For example, Benedict Brown et al. [
3] developed a virtual environment that is capable of finding shape-based pairwise matches of fresco fragments. These preliminary solutions are valuable information for restorers to filter out geometrically incoherent puzzles. Along the same lines, Mellado N. et al. [
4] deployed a virtual reality environment to align broken archaeological objects by computing a set of registration methods and constraints such as the Iterative Closest Points (ICP) [
5] algorithm, vertex distance, and normal coherence. Additionally, their system takes into consideration the user’s feedback to enhance registration accuracy, thus functioning as a real-time interactive registration platform. More recently, Papaioannou Georgios et al. [
6] proposed a comprehensive pipeline to reassemble 3D archaeological artifacts including ceramic vessels and broken stone fragments of various shapes and sizes. The developed virtual environment includes a set of segmentation methods as well as registration tools for either pairwise or multi-part matching. These methods encompass fracture classification, region growing segmentation, curved-based features extraction, and fragment penetration penalization methods for fine alignments.
On the other hand, automatic methods seek to find matching fragments by computing and comparing high level geometrical properties. This is a challenging task since fragmented archaeological assets have different characteristics so that specific matching cues are considered for puzzling. For instance, poly-chrome ceramic broken fragments are generally composed of well-defined curves, thus making shape-based matching heuristics along with color comparisons suitable approaches to find potential joint regions [
7]. Similarly, the contour and thickness of pottery fragments are essential features for the automatic reassembling of vessels [
8]. Stone fractured fragments, however, are more complex artifacts to deal with due to their erratic shape and erosive material. Therefore, researchers have resorted to sophisticated geometric computations to numerically describe and match regions of interest. The method proposed by Huan Qi-Xin [
9] relies on discrete geometric operations [
10] computed over salient areas to estimate geometrical relationships among multiple fragments. The set of obtained correspondences is processed by the Random Sample Consensus RANSAC method [
11] to remove false positives. Lastly, an accurate rigid body transformation is calculated from the resulting matches, thus completing the automatic alignment workflow. Following the same registration process, Zhang Kang et al. [
12] proposed to estimate a matching template from the intact object’s surfaces based on the Signature of Histograms of Orientations SHOT [
13] descriptor and curvature-based features. Then, potential matching relationships are computed by comparing the initial template to the geometrical information of the fractured pieces. More recently, Qunhui Li et al. [
14] presented a pairwise matching approach that compares concave-convex patches extracted along boundary contour surfaces. Afterwards, similar to the aforementioned approaches, the matched areas are accurately aligned by means of the Iterative Closest Points algorithm.
The outlined automatic fragments reassembling methods have been successfully applied to puzzle objects with intact broken surfaces. Consequently, the geometrical overlap between fragments is sufficient for feature-based matching methods to find a vast number of correspondences. This property, however, does not hold for archaeological fragments due to the fact that their fractured surfaces have suffered significant damage, preventing automatic methods from computing reliable correspondences. Therefore, the proposed Puzzling Engine is a hybrid approach that combines a set of registration tools with automatic matching algorithms to ease digital puzzling. More specifically, similar to computer-assisted methods, segmentation algorithms are implemented to extract regions of interest such as boundary contours, curve-based local salient points, and the main planar decorated surface. Moreover, inspired by automatic approaches, a set of matches automatically computed by the engine based on the input models’ geometric properties, serves as starting point for user decisions. These matching cues play a fundamental role in the puzzling process as they serve as either a confirmation or starting point for restorers to propose alignment solutions. By exploiting the best properties of such approaches, the proposed engine is capable of accurately puzzling heavily damaged ancient heritage fragments.
4. Evaluation of Registration Pipeline
The previous section focused on the automatic registration algorithms of the Puzzling Engine. The aim of this section is to evaluate the fragments alignment workflow. To this end, we employ a large dataset of ancient Egyptian fragments, which were excavated over the last decade. Due to field research time limitations and the sheer quantity of archaeological assets, it is unfeasible to find similar fragments and puzzle them on site. Moreover, their high degree of deterioration hampers experts to easily identify intuitive joints. Since fragments are not clustered according to distinctive characteristics such as color, shape, size, excavation place, etc., the proposed pipeline is used to perform a massive search for potential matching possibilities. The results of this brute force matching are evaluated by experts to determine which of them are actual fits. After discarding false positives, the correct matching solutions are manually aligned via the puzzling engine tools. The final accurate alignments approved by experts serve as ground truth metrics to compare the proposed Normal-Coherence-based matching approach against similar featured-based registration methods. The evaluation criteria include a comparison of computed 3D-rigid body motions with ground truth transformations, processing time of matching algorithms, and frame rendering of the virtual platform.
4.1. Dataset of Fractured Fragments
Our data-set is composed of a large group of broken decorated wall fragments that were found in the elite cemetery of Dayr al-Bersha, Egypt. The fragments originally belonged to the colossal decorated tombs that date back to the Middle Kingdom period of ancient Egypt, from 1975 BC to 1640 BC. The current ruinous state of the site, due to natural catastrophes, looting activities, and historical events, led researchers of KU Leuven University to preserve and further study the site. During their on-site missions, they excavated thousands of decorated stone blocks of different sizes and characteristics. On average, the size ranges from 10 cm to 50 cm long, are made of limestone, and in most of cases contain a flat surface with decoration. This is a region of interest for experts since it contains remaining traces of either inscriptions or drawings that are identified through decoration colors or relief-based carvings. The main characteristic of this collection, for the current research purpose and according to experts, is that the likelihood of finding some fragments matching together is high. However, due to the great amount of fragments, this is a laborious task.
The digital acquisition of ancient archaeological artifacts poses multiple challenges. For the wall-decorated fragments, in particular, it is primordial to be able to capture every surface of the object while preserving their archaeological properties. Additionally, in order for the registration algorithms to yield reliable results, the input data must satisfy accuracy requirements in terms of homogeneous brightness, scale, and geometric information. Hence structured light technology is deployed to produce accurate dense models of the fragments. More specifically, the 3D scanner
Einscan Pro Plus [
28] is used for acquisition since it is equipped with an external camera and two flashlights to capture color under controlled light conditions. Furthermore, it is capable of recording point-clouds at a 0.2–3 mm point distance resolution. Finally, the raw 3D data is processed to generate 1500 polygon mesh models, whose number of faces varies from
to 1.4 M.
4.2. Brute-Force-Based Approach for Ground Truth Metrics
To obtain ground truth registration metrics from the digitized fragments, a brute force matching is conducted on the basis of the proposed registration pipeline, combined with the manual alignment tools of the engine. First, the contour point-clouds of the main decorated surfaces, which were extracted when generating the color classifier’s training data, serve as input for the proposed registration workflow. The ISS key-point extractor is combined with FPFH and USC descriptors, complying with the Normal Coherence requirements. To err on the side of caution, both the feature extractor and descriptors were computed for different search radii. Then, a brute force matching is performed for all computed descriptors not only to estimate correspondences but also to calculate a rigid-body transformation for automatic alignment. This results in a vast group of potential pairwise puzzles. Consequently, the second step consisted of filtering out erroneous solutions and improving the estimated rigid transformations. The latter is done by experts via the registration tools of the puzzling engine. For sake of computing consistent ground truth metrics, the puzzling engine is slightly modified to allow the user to solve the puzzle by only maneuvering the query fragment. Once a fine alignment is manually determined, the engine computes the rigid body motion that transforms the query fragment’s initial position to the manually modified position. This process is done by means of Singular Value Decomposition (SVD), a factorization method that computes the optimal rotation and translation between a group of transformed points. The final set of obtained transformation matrices serves as ground truth metrics.
The aforementioned steps are computationally expensive since they entail time-consuming mathematical operations. We are dealing with hundreds of mesh models and the computational complexity of the brute force matching process itself is
, where
n is the number of fragments. Therefore, this problem is addressed through ubiquitous computing using HTCondor [
29], an open-source software solution that allows for performing intensive tasks while fairly distributing the computational burden over multiple computational cores.
Figure 8 shows an overview of the computational processes that are managed by HTCondor. Prior to brute force matching, feature extraction and description processes are submitted to HTCondor so that these tasks are performed in parallel for every single fragment. The output of such processes consisted of a list of keypoints and descriptors encoded into binary files for each fragment. Once descriptors are computed, HTCondor manages the pairwise brute force matching for all possible fragment combinations and descriptor configurations (FPFH and USC with different search radii). The brute force matching process yielded 60 pairwise solutions in total. After these results were revised and improved by experts, the final group of actual puzzles consisted of 12 solutions. Thus, the precision of the brute force approach is 0.2. The recall cannot be determined since we do not know the actual number of pairwise solutions. The final group of pairwise solutions determined by experts is illustrated in
Figure 9. Although this nondiscriminatory matching process is certainly prone to yield numerous false positives, it helped determine ground truth metrics from a dataset where it was uncertain to find puzzles.
4.3. Accuracy of Normal Coherence-Based Registration Methods
We set up an experiment which seeks to evaluate the accuracy of 3D rigid body transformations estimated by the Normal Coherence-based registration algorithms. The ground truth transformation matrices estimated in the previous step are compared to a set of arrangements of features and matching methods. The experimental setup results serve as indicators to assess which algorithms combinations are suitable to increase the degree of automation of the puzzling engine. These include:
FPFH + normal coherence rejector,
FPFH + distance threshold rejector,
USC + normal coherence rejector, and
USC + distance threshold rejector. The accuracy comparisons are conducted by examining the error statistics proposed by Eggert D.W. et al. [
30]. These metrics include the norm of difference between estimated translation vectors,
and the norm difference of unit quaternions representing the rotation,
. Finally, the obtained reference transformation matrix and the one estimated from the set of correspondences are applied to the query fragment’s point-cloud. The Root Mean Square (RMS) error of the distance between such points is calculated by Equation (
1), where
N is the number of points and
and
are the transformed point-clouds of registration algorithms and ground truth data respectively:
The goal of this registration metric is to measure the accuracy of the computed transformation matrices’ elements. The metric comparisons are carried out in Euclidean space for both the 3-dimensional translation vector and the 4-element vector of orientation quaternions extracted from the rotation sub-matrix. Moreover, the RMS error of automatic alignments is calculated to measure the overall influence of the estimated transformation when applying it by the query fragments’ points.
Figure 10 shows the results for every pairwise solution. Each puzzle is listed according to its corresponding reference number indicated in
Figure 9. The errors are represented in units of the puzzling engine’s global coordinate system, which are given in centimeters since the recorded models were scaled from millimeters to centimeters. As noted in
Figure 10a,b, translation and rotation plots, for most of the solutions the combination of FPFH and NC yields better results since the error difference is close to zero. When NC is considered for the FPFH descriptor, the results are highly improved. For instance, for solutions 0, 2, 8, and 11, the translation error difference between FPFH and FPFH NC is larger than six units. The same behavior can be observed in the rotation plot, but in this particular case the errors are much smaller. Rotation and translation errors provide an insight into the variance of the estimated rigid body transformations’ parameters. However they do not provide us with information on the registration accuracy.
The RMS error, on the other hand, measures the registration performance or the difference in distance between aligned models. This metric evaluates the rigid body transformation when applied to the query fragment. Hence a close-to-zero error means that the automatic alignment is similar to the ground truth. As expected, the FPFH feature with the NC matching approach yielded better results since errors fluctuated between 0 and
for 50% of the found solutions. This means that only slight manual alignments are necessary to accurately register the fragments. To illustrate registration errors,
Figure 11 depicts the pairwise solutions zero, six, and 12. These correspond to the combinations FPFH + NC, USC + distance threshold rejector and USC + NC, whose errors are
,
, and
respectively. As noted in
Figure 11a, when the error is very low, there is an imperceptible difference with the ground truth alignment. However, when errors are larger, misalignments start to become much more visible. For example,
Figure 11b shows an incorrect alignment since the query object is penetrating the target fragment’s surfaces (see orange line). In
Figure 11c, although there is no overlap between fragments and at first glance the alignment seems correct, when comparing the result to the ground truth, the query fragment’s rotation and translation are erroneous.
This experimental framework shows that the proposed registration pipeline is well-suited to reassemble heritage fragments. In spite of the fact that this approach might estimate misalignments, the matching lines proved to serve as a visual guide to rapidly identify potential matching regions. Moreover, the normal coherence approach highly improves the registration performance, so that for some fragments only minor alignment corrections are needed. When this approach is combined with the FPFH feature the registration error is close to zero. Therefore, these algorithms are integrated into the game engine to complement the manual registration tools.
Time-Processing Metrics
Real-Time performance is an important evaluation metric when developing a User Interface. It indicates how fast the engine’s algorithms respond to user operations under different types of input data. In addition, it provides insights into the algorithms’ efficiency in terms of time-processing and memory footprint. Time complexity and frames per second (fps) are two metrics that provide fruitful information to evaluate such a performance. The puzzling engine computes two tasks on the fly: 3D rigid body maneuvers and pairwise matching. Therefore, we estimate both the explored feature correspondence algorithms’ time complexity as well as the engine’s fps. The experiments are performed on the following system: Intel Core i7-7700 at 2.6GHz, 16GB RAM memory, graphic card Nvidia GTX1050, 1493MHz GPU clock, Dell, Ghent, Belgium.
Table 1 shows the processing time of the feature matching algorithms. The first two columns correspond to the point-cloud density of query and target models. The other columns indicate the deployed feature descriptors along with their array length. The processing time is given in milliseconds and only measures the matching process. This constitutes arranging the descriptors arrays into k-d trees, removing false positives and euclidean distance-based comparisons. Note that matching FPFH features is far faster than USC due to their compactness: The former are constructed of a 33-elements array, whereas the latter descriptor contains 1960 elements. The time complexity of the NC-based matching is higher since it entails an extra iterative step to discard non-Normal-Coherent correspondences. As for the engine’s rendering,
Figure 12 illustrates the fps over a period of time, during which multiple tasks are performed, such as fragments maneuvering, loading multiple mesh models, rendering matching lines, registration, and so on. The fps is quite stable since the average fps is
and a standard deviation of
over 60 s. The obtained results satisfy the 30 Hz real-time rate requirement, which guarantees a smooth interaction between user and 3D models.
5. Conclusions
In this paper a novel Puzzling Engine was proposed for ancient wall-decorated fragments that takes elements of both kinds of reassembling approaches: User-assisted and fully automatic. On the one hand, the puzzling process is performed through a virtual interface that facilitates the 3D manipulation of objects as well as segmenting high level properties of the fragments to intuitively discern matching regions. On the other hand, it takes the key approach of automatic registration pipelines in order to increase its degree of automation when the user is looking for matching regions for alignment. The experimental framework consists of finding pairwise puzzle solutions from a set of more than one thousand wall decorated blocks made of limestone. As proven in the experiments, this puzzling engine was capable of matching fractured stones even in cases where erosion had highly deteriorated the decoration or the matching surface. Although for some fragment samples the registration pipeline alone was capable of computing accurate alignment transformations without user interaction, this approach does not intend to compete against automatic reassembling approaches. The Puzzling Engine aims to support restorers in the matching labor by means of comprehensive and sophisticated registration tools.
As a second key result, this paper presents a study of widely-used 3D features in the context of fragments reassembling. Even though these features have been broadly deployed for object retrieval and robot navigation applications, the proposed work proves that they can be applied to digital heritage reassembling as well. However, the typical feature-based registration pipeline by itself does not provide accurate correspondences. Therefore, we propose to incorporate Normal-Coherent-based matching heuristics to the pipeline in order to obtain reliable matches. The obtained results are quite favorable and provide insights into possible ways to automatically match heavily deteriorated fractured surfaces. Although the puzzling engine requires human expertise to yield accurate results, manual assistance is needed only in the last stage of the registration workflow: Matching validation and fine alignment. Hence future work aims at increasing the degree of automation by a merge between local and global approaches. For instance, shape-based matching of boundary contours for rough alignment and local geometric features for fine registration. This approach might be complemented by considering additional matching cues such as decoration content, or curves continuity of hieroglyphics between counterpart fragments. Additionally, a culling step to filter out incompatible assets, prior to performing the registration pipeline, would reduce the computational burden of the brute force searching. This can be done by considering the scale, color, and global shape of the fragment before computing more complex geometry-based matching operations. These additional matching characteristics can be applied to puzzle not only decorated stone fragments but also other types of 3D heritage artifacts such as broken pottery, ancient figurines, sculptures, etc.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}