1. Introduction
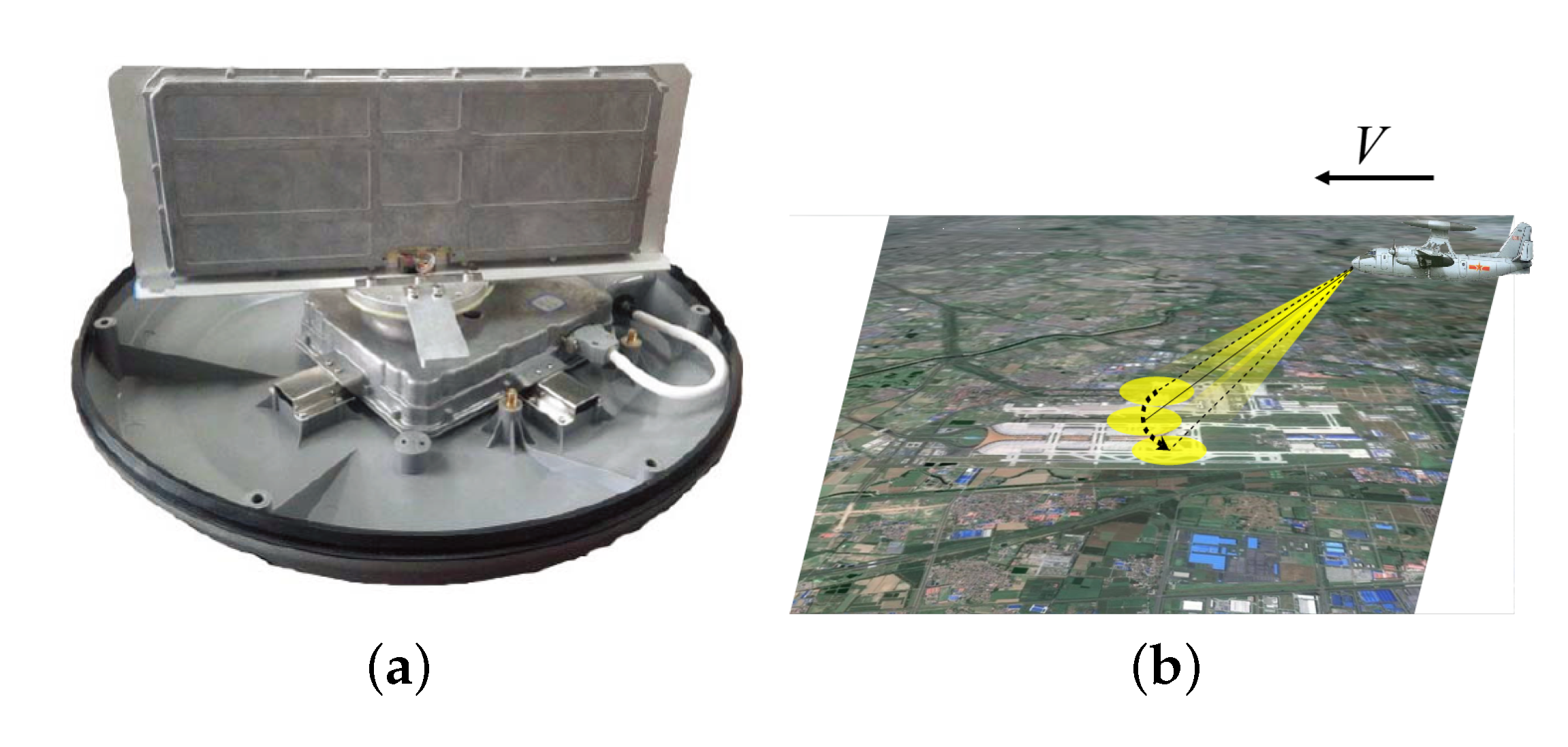
Airborne scanning radar works as a noncoherent sensor and realizes forward-looking area imaging by sweeping the observation scenarios. This imaging system is widely used in the fields of ground mapping, microwave radiometers remote sensing, autonomous landing and self-driveless [
1,
2,
3,
4,
5]. High range resolution can be obtained by emitting the large time-bandwidth product signal such as linear frequency modulation (LFM) signal and an impulse compression technique. Nevertheless, limited by the physical antenna aperture, its azimuth resolution is coarse compared with the range resolution.
Because previous studies have shown that radar azimuth echoes can be regarded as the convolution of scattering coefficient and antenna modulation. In order to improve the azimuth resolution, several approaches have been proposed. Because these approaches break through the Rayleigh limit of antenna aperture, we usually call it azimuth super-resolution technology. Mathematically, azimuth super-resolution is an ill-posed inversion problem, because of the low-pass character of the antenna pattern and noise disturbance.
Lucy-Richardson, which is a well-known deconvolution approach for optical image, was applied to the field of radar super-resolution imaging in Reference [
6]. It transforms the super-resolution problem into the maximum likelihood estimation, however, its resolution is limited due to lack of prior information about the target. In Reference [
7], the resolution was further improved by introducing prior information of target and noise under Bayesian frame. Regularization methods are good approaches to address ill-posed inversion problem, which were used by the authors of References [
8,
9,
10,
11,
12] to solve radar super-resolution problem. The essence of regularization methods is to add constraints to limit the range of solution space, thereby transforming the original ill-conditioned problem into a nearby well-conditioned problem. The commonly used regularization terms are
norm and
norm. Truncated singular value decomposition method has also been put forward for radar super-resolution imaging [
13,
14,
15,
16]. In general, it is also a kind of regularization method. The solution is projected to a subspace composed of dominant large singular values to avoid imaging errors caused by small singular values. In addition, because the azimuth echoes are a time series related to angle, array signal processing methods [
17,
18,
19,
20,
21] can be used to address azimuth super-resolution problem due to the similarities of mathematical model and physical principle between array processing and scanning imaging.
Even though the above methods advanced the imaging resolution to a certain degree, they all lost the edge information of targets. In these applications, such as ground mapping, self-driveless, airdrop location and so on, we expect to obtain precise topographic information of the forward-looking area of the platform, such as buildings and rivers. To facilitate target recognition, high resolution of the radar forward-looking imagery and more contour information of the target area are both required. The aforementioned super-resolution methods only care about the improvement of the azimuth resolution, but ignore the contour of the target. The total variation (TV) imaging method is mainly under the regularization framework, using the
norm of the gradient operator as the constraint term [
22,
23,
24,
25,
26,
27,
28]. It can improve the azimuth resolution while maintaining the edge information of the target, providing help for subsequent target detection and recognition. At present, research on the TV algorithm mainly focuses on solving the TV function. In References [
29,
30], the authors proposed an iterative reweighted norm (IRN) to solve the TV problem, which is what we call the IRN-TV method. This method utilises the minimum value of the
norm to approximate the minimum of the
norm to obtain the solution. In Reference [
31], the primal-dual (PD) method is presented to settle the TV problem. The main advantage of this approach is to eliminate some of the singularity caused by the non-differentiable characteristic of the TV norm by smooth approximation before applying a linearization technique such as the Newton method. In References [
32,
33], the author proposed a Split Bregman (SB) approach, which attracts much attention in the signal and image processing field. The basic idea is to transform a constrained optimization problem to a series of unconstrained sub-problems.
By analyzing the structure of the antenna pattern matrix and gradient matrix, this paper discovers that the high-dimensional matrix with inverse is a sum of a diagonal block with banded Toeplitz blocks plus a special block tridiagonal correction in the IRN-TV method. For the convenience of description, we name this high-dimensional matrix with an inverse matrix
. Because the matrix
has a special structure of a block tridiagonal; decomposing the matrix
into multiple small block matrices can effectively reduce the computational complexity. For this reason, a fast total variation method based on an iterative reweighted norm (IRN-FTV) is proposed. In this work, the IRN-TV method is first researched, and its computational complexity is discussed. Then this paper decomposes the matrix
into multiple small blocks and applies the approach of twisted decomposition [
34] to accelerate its inversion. It is worth noting that we do not obtain the matrix
by multiplications of a large matrix in the actual implementation process. We mathematically deduce the explicit expression of each small block matrix constituting the matrix
to avoid large matrix–matrix multiplications.
The structure of this paper is organized as follows—in
Section 2, we formulate the azimuth echo convolution model of airborne scanning radar. In
Section 3, the proposed IRN-FTV is illustrated in detail. We introduce the traditional total variation (TV) method solved by iterative reweighted norm (IRN) firstly. Then we analyze the special structure of high-dimensional matrix with inverse and propose our IRN-FTV method. In
Section 4, we conduct simulations and airborne experimental data to prove the effectiveness of this method. A conclusion of this paper is presented in the last section.
2. Echo Convolution Model
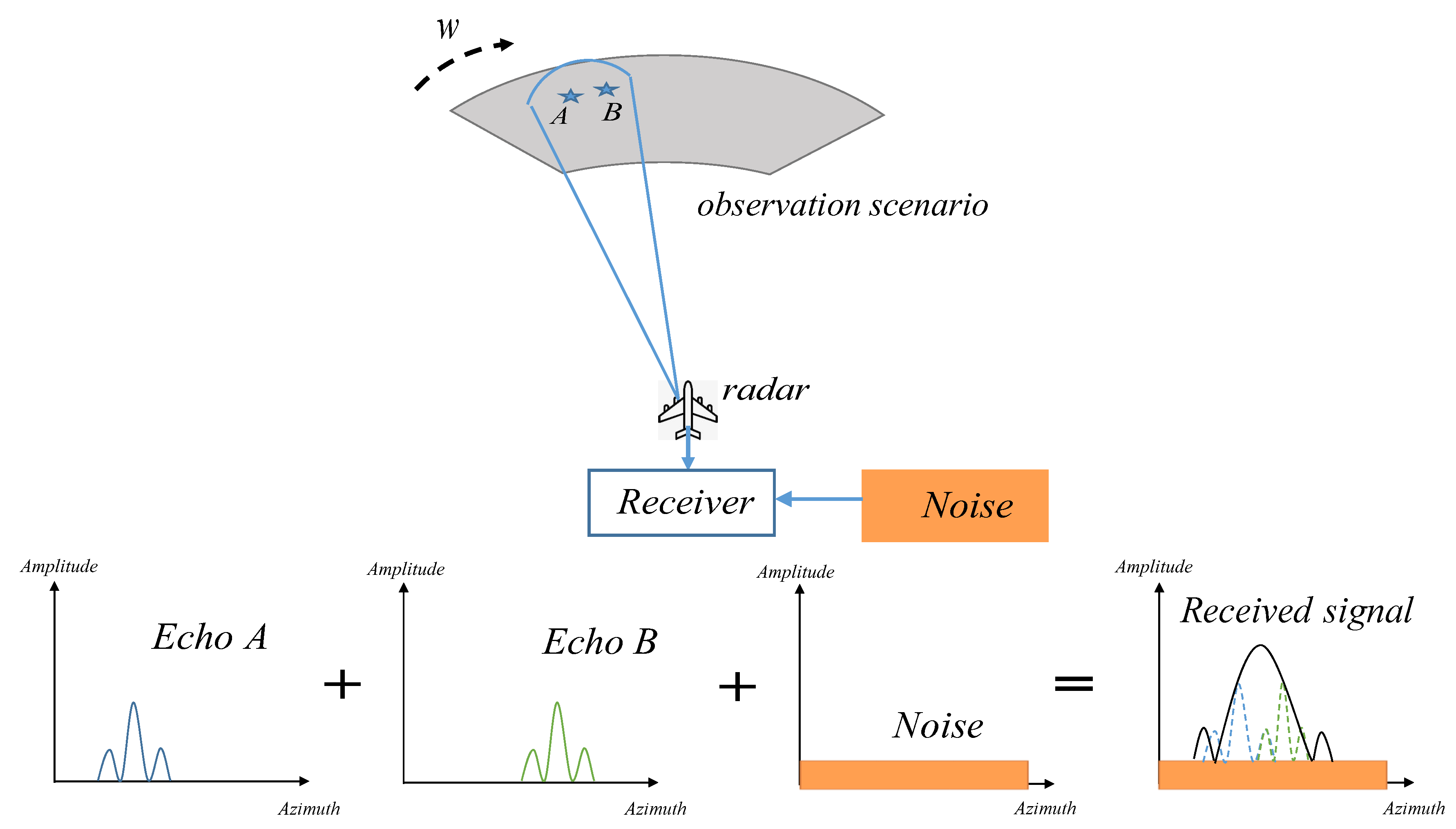
A radar system is required to emit electromagnetic waves to capture target information. The contradiction between the range resolution and the detection distance is resolved by transmitting a chirp signal, which is a kind of large time-bandwidth product signal. Employing mature pulse compression technology, we can achieve high range resolution. Therefore, improving azimuth resolution becomes the current task.
Figure 1 illustrates the procedure of azimuth echoes acquisition. If the interval between the two targets is less than the beamwidth, the echoes of the two targets are added to get a composite echo. It can be clearly seen that due to antenna beam smoothing, the azimuth resolution becomes coarse.
The transmitted chirp signal is expressed:
where
is range fast time,
is the impulse width.
and the other is 0.
represents the signal carrier frequency, and
k denotes the chirp rate.
In radar imaging, we usually treat the observation scene as a two-dimensional matrix, and each entry of the matrix is the reflectivity coefficients of the scatters.
where
m is the range dimension of the observed scene and
n is the azimuth dimension of the observed scene.
represents the backscattering coefficients of point
.
After the received echo is down-converted, it is expressed as:
where
t is azimuth slow time.
denotes the antenna pattern modulation and
denotes the echo delay of point
.
Then range resolution is enhanced by pulse compression technology. For moving platform, due to the constant motion of the platform, echo signal is distributed in different range cells, hence range walk correction is necessary. After completing pulse compression and range walk correction in the frequency domain, the received echo is:
where
is the Doppler shift.
In a radar forward-looking area, the Doppler shift is usually negligible. After discarding the Doppler shift, we can discover that the echo is a two-dimensional convolution model. High range resolution has been realized, we only focus on the azimuth echo and rewrite it in matrix form.
where echo matrix
and observed scene scattering coefficient matrix
are converted into a column vector.
is the received echo vector,
is target scatter vector,
is the additive white Gaussian noise.
is the antenna pattern matrix composed of antenna pattern given by:
where
is the antenna pattern modulation in one range cell.
is the sampling of the antenna pattern.
Through the above azimuth convolution model, we transform the azimuth super-resolution problem into a deconvolution problem. What we need to do is to recover the target scattering coefficient accurately from the noisy echo with a known convolution kernel via deconvolution technique. Obviously, the deconvolution process is ill-posed, azimuth super-resolution is mathematically an ill-posed inversion problem.
3. The Proposed Method
In this section, the total variation method solved by iterative reweighted norm (IRN-TV) is first described, and then its high computational complexity is analyzed. Then, we derive the block tridiagonal structure of the matrix . Finally, the fast total variation method based on iterative reweighted norm (IRN-FTV) is introduced in detail.
3.1. The Irn-Tv Method
Azimuth echo convolution model is as follows.
Regularization strategy is one of the good ways to deal with ill-posed inverse problem. The regularization method replaces the original ill-posed problem with a problem that is close to well-conditioned by restricting the range of candidate solutions. The general form of standard regularization function [
35,
36] is:
where the value of
p,
q depends on the norm type you choose.
is the data fitting term,
is the adding regularization term or penalty term,
is a parameter that controls the trade off between the fidelity term and penalty term.
For maintaining the edge of the target, there are some other edge-preserving regularizers in References [
37,
38] besides the TV operator. But these new regularizers are mainly suitable for multi-spectral image or hyperspectral image rather than radar echo imagery, so this paper still adopts the TV operator. The TV operator has different forms, such as isotropic TV norm, anisotropic TV norm and smooth approximation TV norm [
39]. According to the vectorized target scattering coefficient matrix and the Toplitz structure of the antenna measurement matrix, this paper constructs horizontal and vertical discrete gradient operators
and
in Equations (13) and (14) shown at the next page as regularization term. For
,
, the objection function is constructed as the following:
where
and
are respectively horizontal and vertical discrete gradient operators.
Beforehand, we need to define
in Equation (
10). Then
and Kronecker product are employed to define
and
.
is a
identity matrix, ⊗ is the Kronecker product.
Since the
norm is not differentiable at the origin, the objective function minimum cannot be solved by the derivative method. Hence we use the iterative reweighted norm (IRN) approach, solving the minimum
norm problem by solving a sequence of minimum weighted
norm problem. We define the following matrices:
where
, and
,
, ⊙ is dot product.
We use the iterative strategy to constantly update
and finally approach the true value. The iterative process, which is called the total variation super-resolution imaging method, is as follows:
where
k is iterations for convergence.
Because the observed scene scattering coefficient matrix and echo matrix are vectorized, the main computational burden of the IRN-TV method comes from matrix multiplication and inversion of and , which both are . Because each iteration needs to update and calculate , this is the root cause of slow running speed of the traditional IRN-TV method.
3.2. Block Tridiagonal Structure of the Matrix R
From the above analysis, we can see that the traditional IRN-TV method is slow due to the inversion and multiplication of large matrices in each iteration. Hence this paper mainly cares about how to improve the computational efficiency of and .
When
,
is the identity matrix. We have
Therefore, this article pays concentration on , the more general term.
Firstly, we define the matrix:
and we can infer the following equations.
The matrix
is block diagonal matrix with Toeplitz block:
In addition, we find that the results of
satisfy the structure of block tridiagonal matrix:
where each entry is a
square matrix.
For the convenience of description, let
. Thus the matrix
is a sum of a diagonal block with banded Toeplitz block plus a special block tridiagonal correction.
Assuming that
, the expression for each block matrix of
is deduced in Equations (22), (24) and (25).
3.3. Irn-Ftv Method
The following task is to accelerate the inverse of
. Many methods for fast inversion using the block tridiagonal properties have been proposed [
40,
41,
42]. In this paper, the method of twisted block decomposition is employed.
We assume that matrix
is the inverse matrix of
.
where
is a
square matrix.
The method of twisted block decomposition consists of four parts, which are detailed below.
3.3.1. Initialization
We assume , where represents a identity matrix, denotes a zero matrix.
and , are auxiliary matrix sequences, and each entry of the sequences is a square matrix.
3.3.2. Compute the Inverse of the Column
The inverse of the
column
can be expressed as:
where
are the auxiliary matrix sequences as well as
.
3.3.3. Compute the Inverse of the Column
Similarly, we have the inverse of the
column
:
where
are also the auxiliary matrix sequences.
3.3.4. Compute the Inverse of the to Column
By the same way, we can easily deduce the following equations.
The twisted block decomposition approach converts the inverse of
into computation of multiple small matrices, which reduces computational complexity and saves computation time. By introducing auxiliary matrix sequences, each column of
satisfies an iterative formula. For each column, only the inverse of the initial element is required, and the inverse of other elements in this column can be deduced by a recursion formula. The algorithm contains
direct inverse of
matrix,
multiplications of
matrix,
additions of
matrix. So, the total complexity of twisted block decomposition approach is
. Obviously, the complexity of twisted block decomposition approach is less than that of the existing fast inversion algorithms for block tridiagonal matrix, as shown in
Table 1.
It is worth noting that in the actual implementation, we do not need to calculate the matrix via . After calculating the vector , the expression of entry of the matrix can be obtained according to the Equations (22)–(24). Exploiting these small block matrices , we apply the method of twisted block decomposition to realize the fast inverse of .
In order to explain the inversion process explicitly, we package the entire process of fast inversion for
into a function
, as shown in
Table 2. In this function, the vector
is the input variable and
is the output.
Hence detailed process of the IRN-FTV method in this paper is as follows:
Compared with the traditional IRN-TV method, our IRN-FTV method takes advantage of the block tridiagonal structure properties and accelerates the inversion process by way of twisted block decomposition. In addition, in the actual implementation process, our method only needs to calculate the vector , which avoids large matrix-matrix multiplications. Our method effectively addresses the issue of multiplications and inversion of large matrices in each iteration and improves the computational efficiency of the IRN-TV method.
5. Conclusions
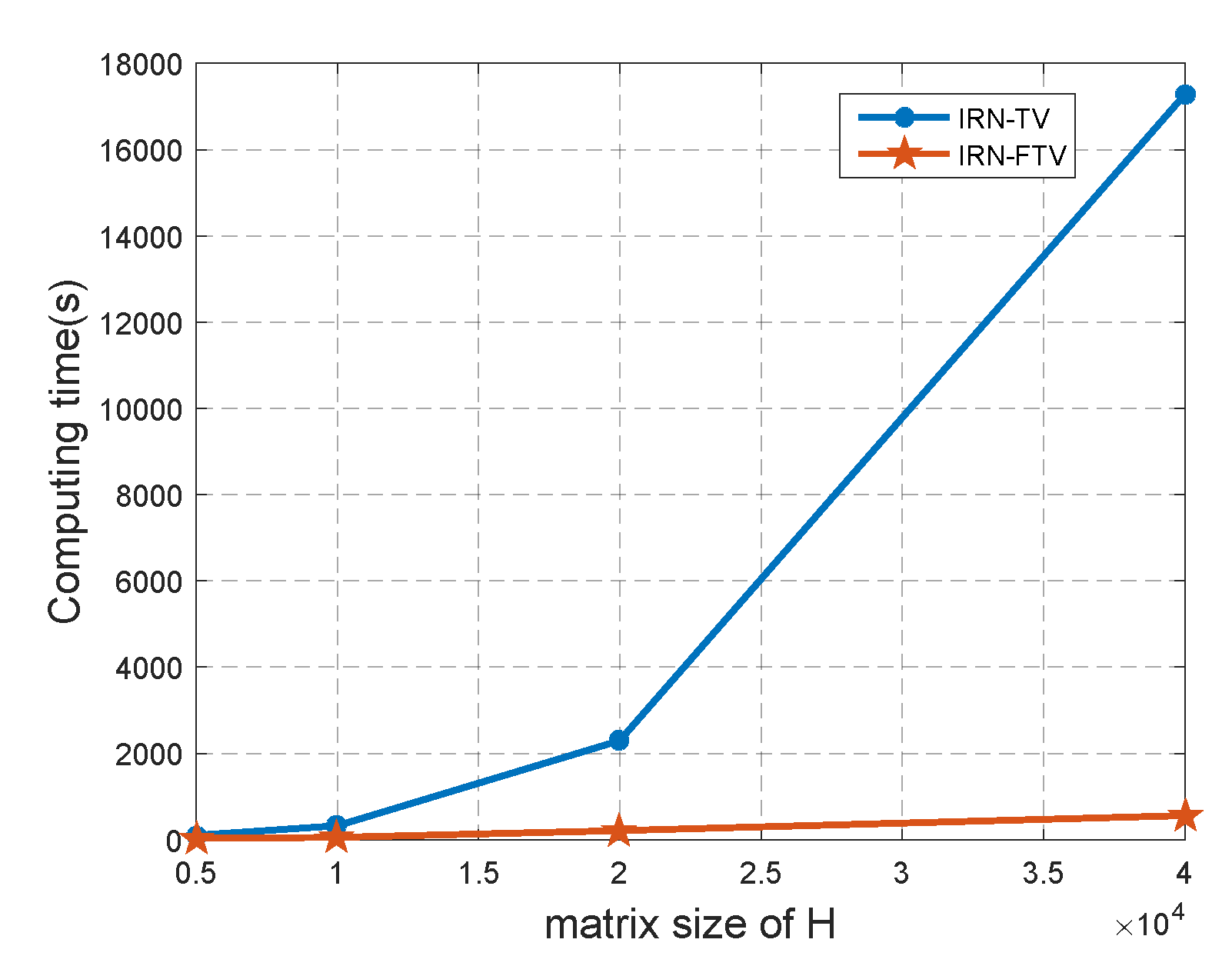
In this paper, a fast total variation (FTV) algorithm solved by iterative reweighted norm (IRN) for airborne scanning radar super-resolution imaging is presented. By analyzing the traditional total variation (TV) method, we find that the main reason of its slow running speed is the high-dimensional matrix multiplication and inverse in each iteration.
Exploiting the structural property of the high-dimensional matrix with inverse, we convert the high-dimensional matrix with inverse into multiple small block matrices and apply the approach of twisted decomposition to accelerate its inversion. In addition, in the actual implementation process, our method avoids multiplications of high-dimensional matrices by deducing the explicit formula of each small block matrix.
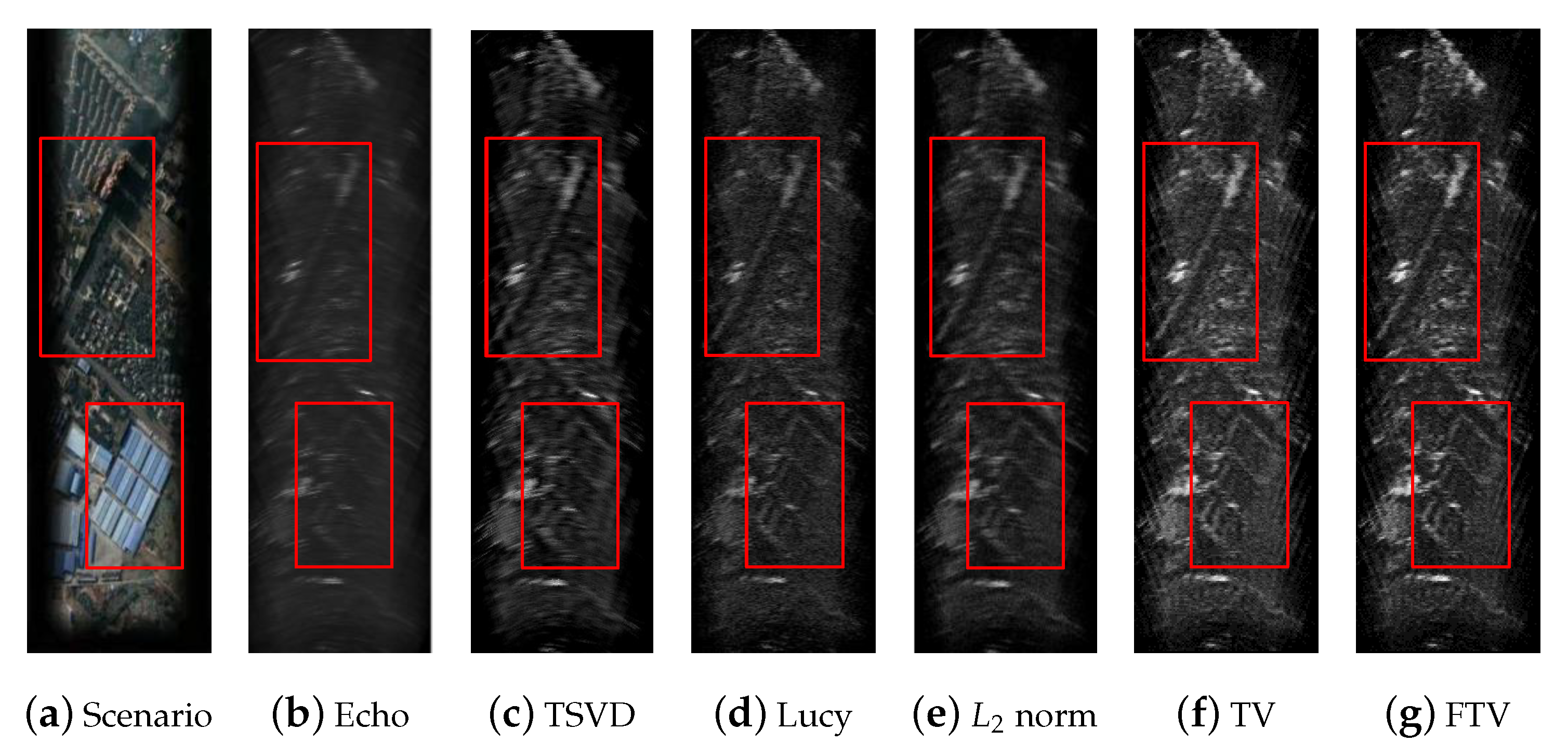
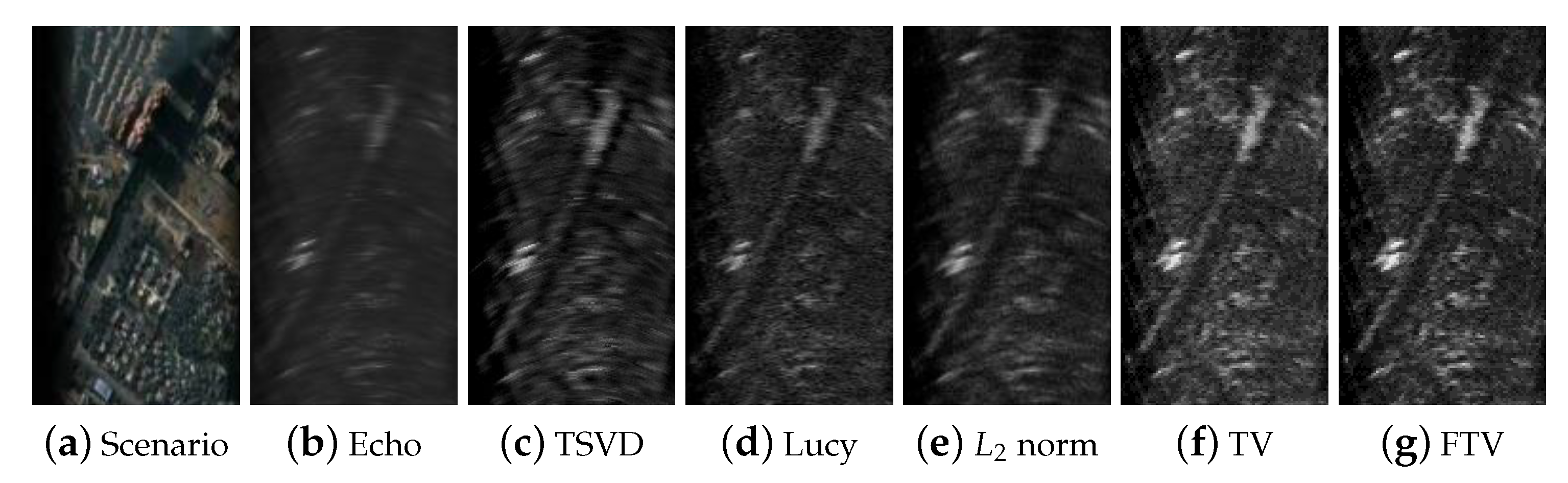
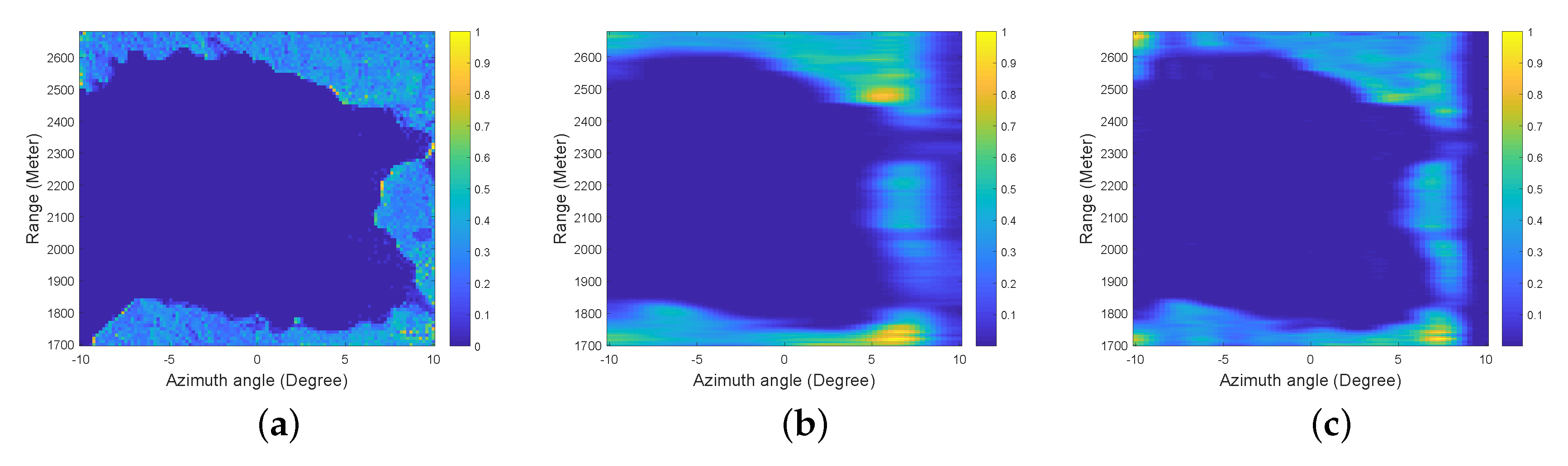
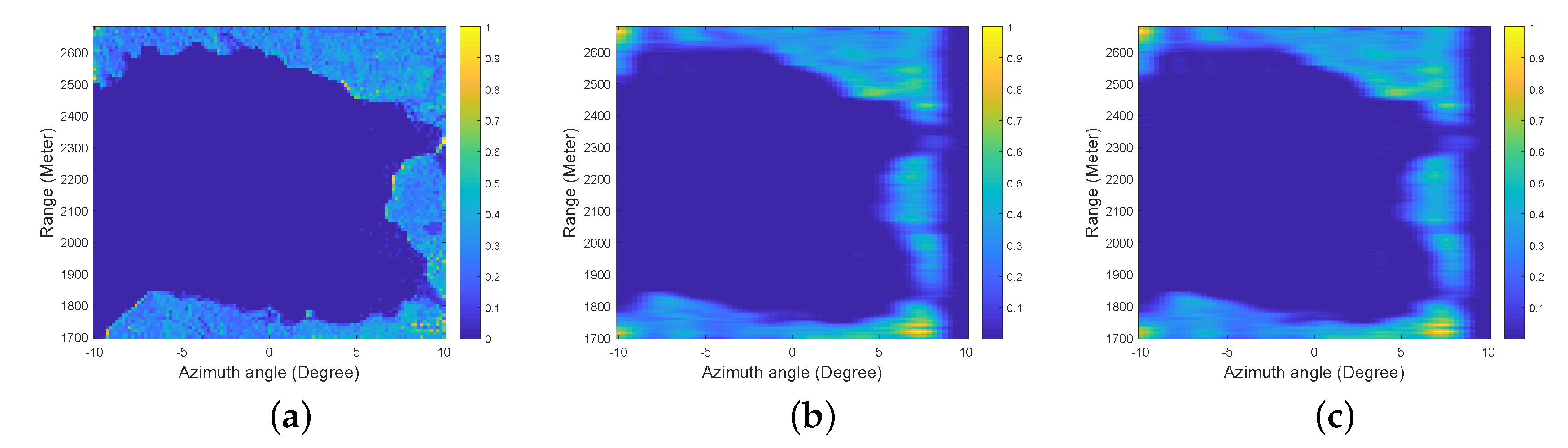
Simulation and airborne experimental data results indicate that the superresolution imaging performance of our method will not degrade compared with the traditional TV method. The numerical results illustrate that the proposed IRN-FTV method offers a time complexity reduction especially for high-dimensional observation scenes.
The advantage of the proposed method is mainly for targets with a clear outline or extended point targets with a distinct edge. If the target is too sparse relative to the scene, then the target can be regarded as an isolated point, the advantage of the proposed method will not exist. Generally, the proposed method is suitable for a target with a clear contour in a dense scenario, such as houses in experimental data results.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}