Performance Evaluation of Troposphere Estimated from Galileo-Only Multi-Frequency Observations


Abstract
:
1. Introduction
2. GNSS Troposphere Estimation Methods
2.1. Functional Model
2.2. Processing Strategies
3. Status of Standalone Galileo Troposphere Solution
4. Evaluation of Troposphere Estimated from Multi-Frequency Galileo Observations
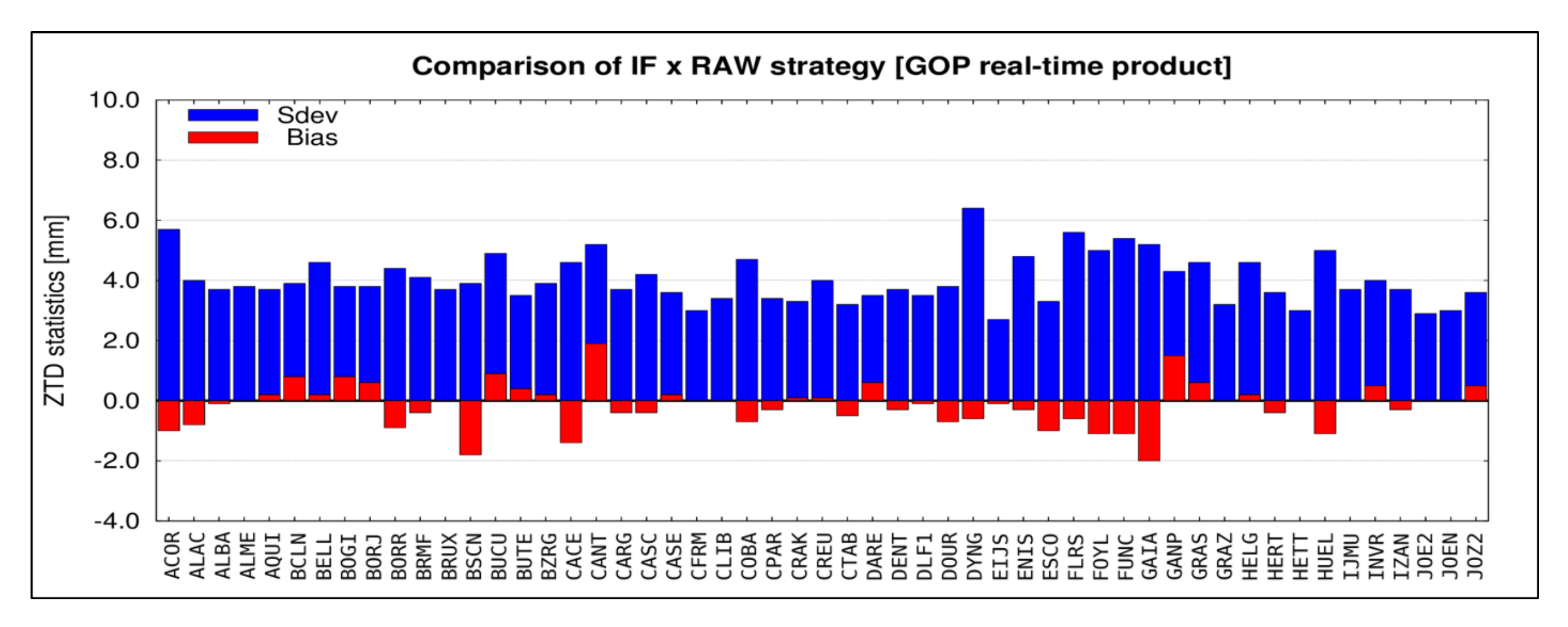
4.1. Comparison of ZTD from the IF and the RAW Model
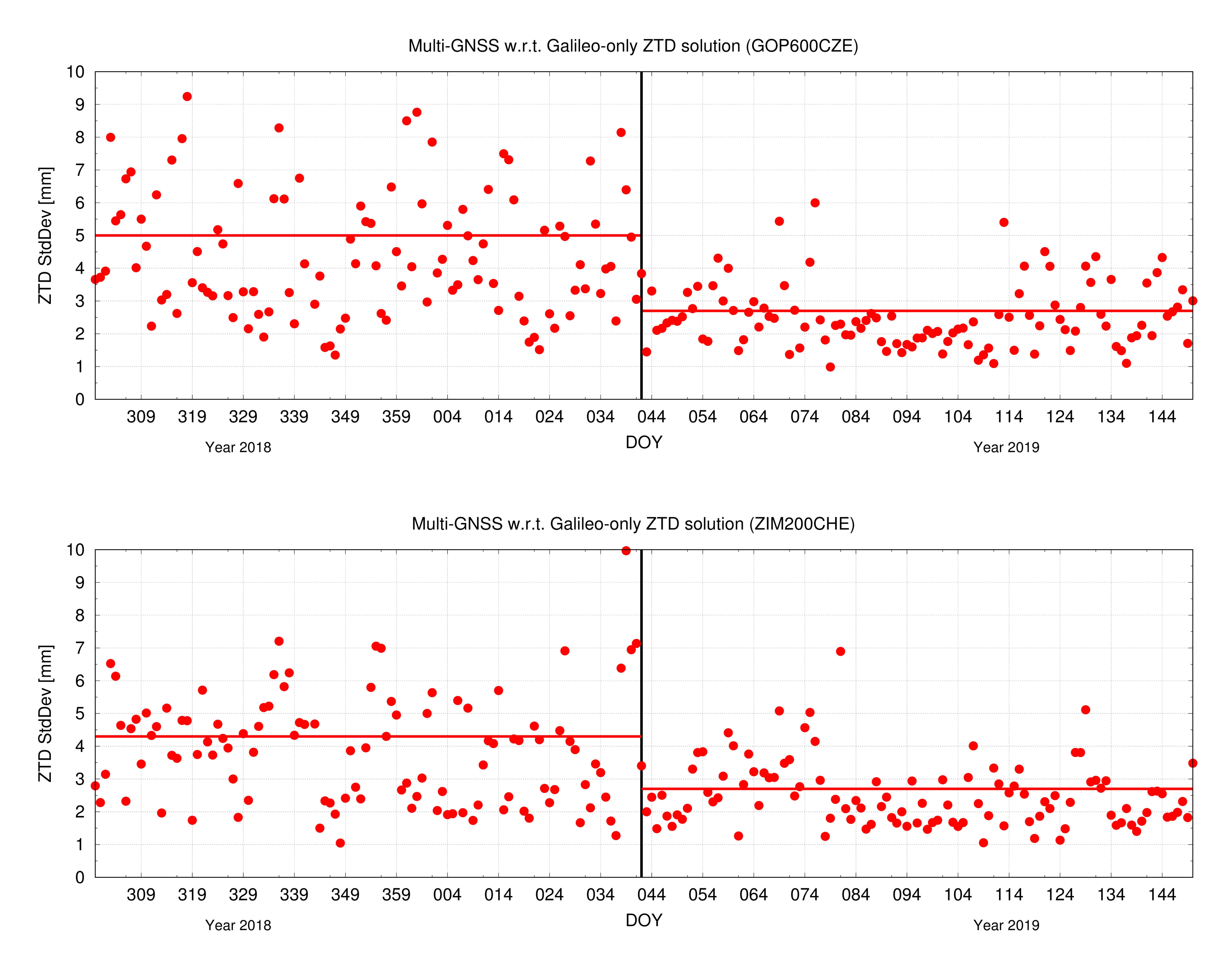
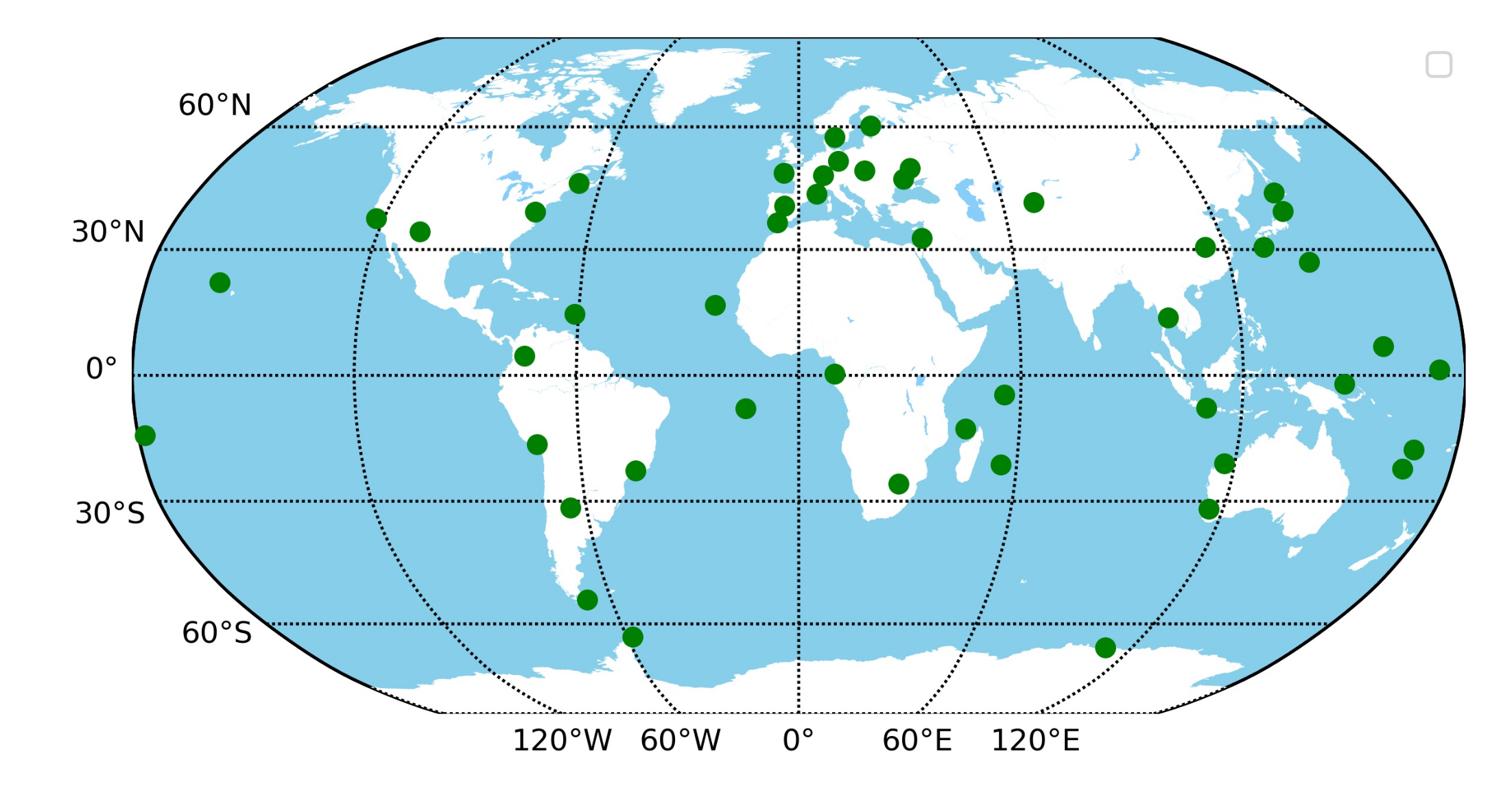
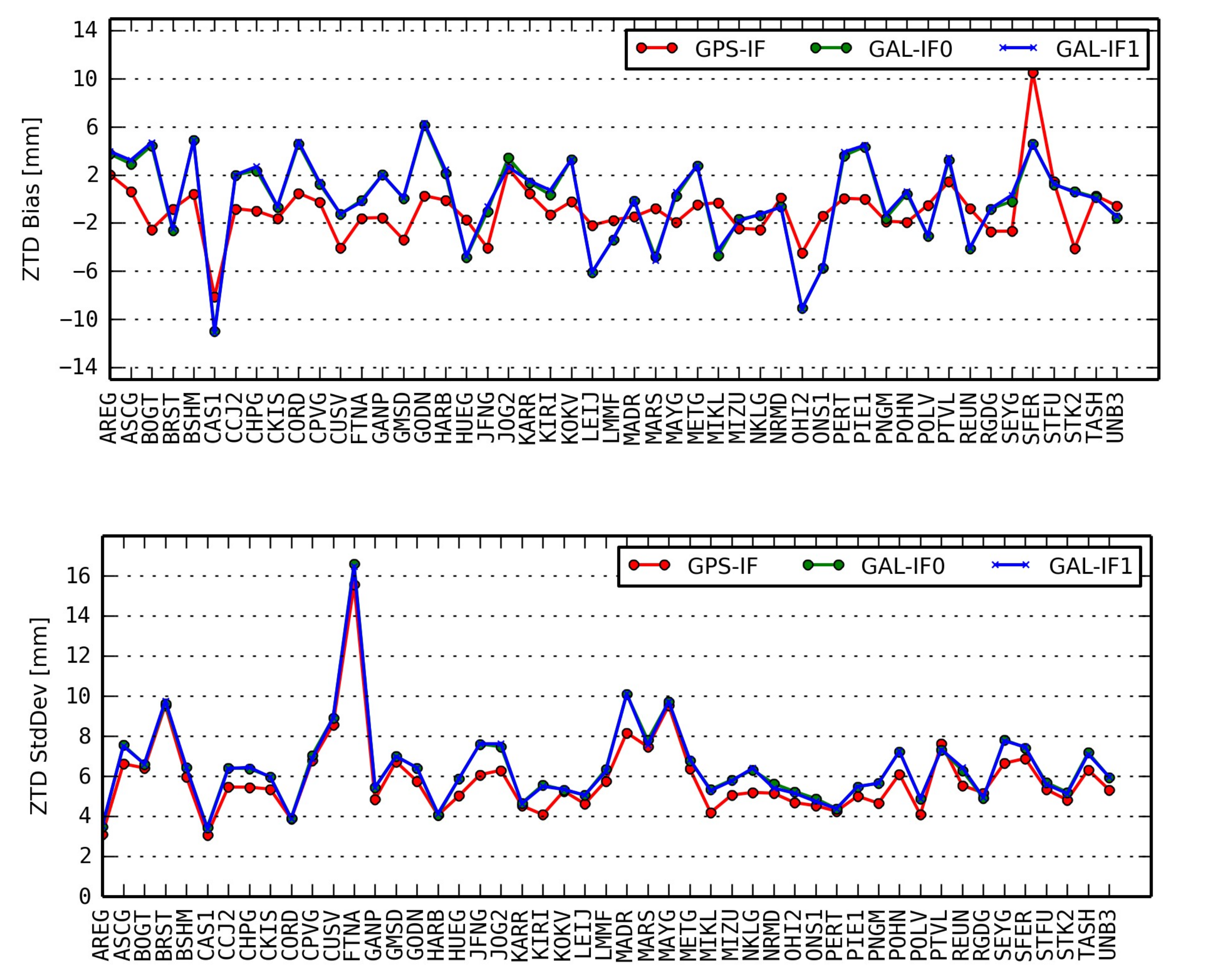
4.2. Comparison of Tropospheric Delay from the GPS-Only and Galileo-Only Solutions
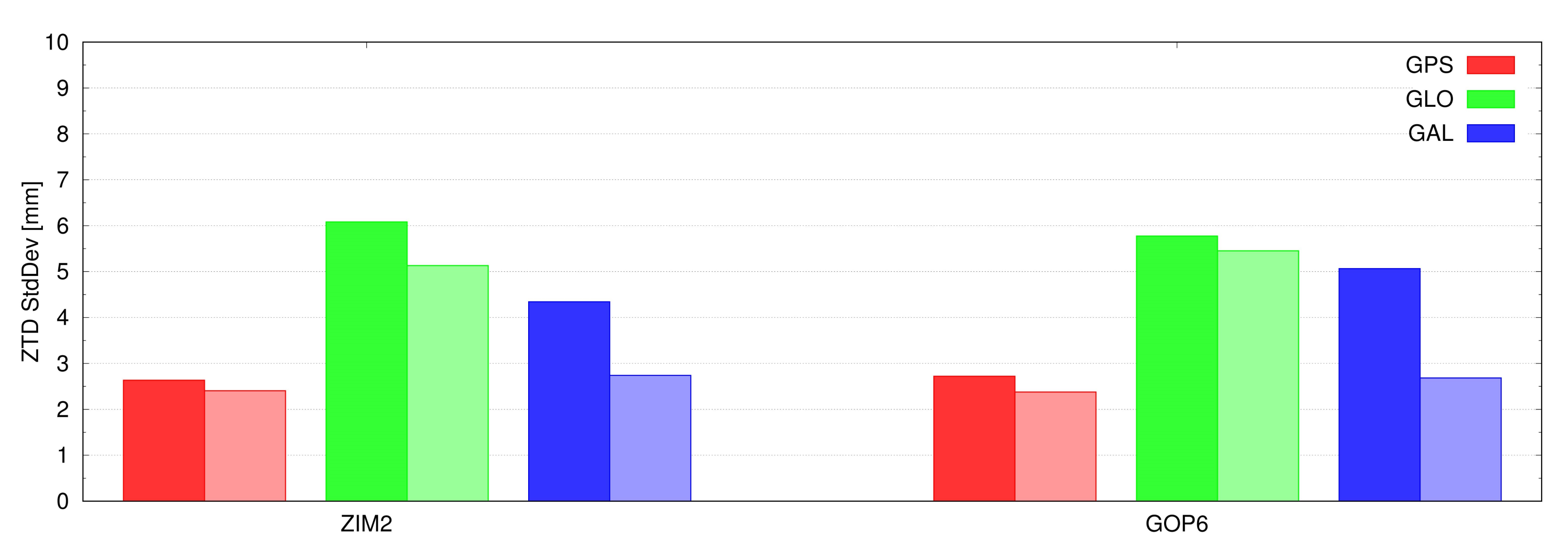
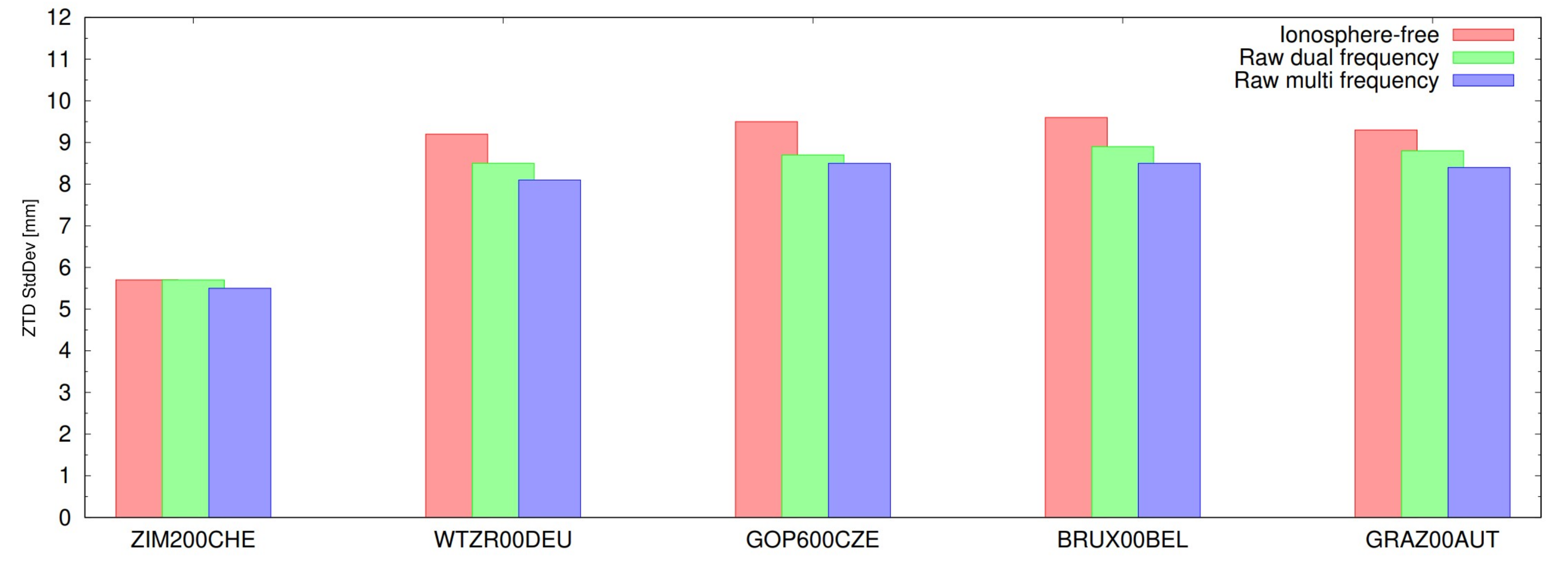
4.3. Multi-Frequency Troposphere Solutions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wilgan, K.; Geiger, A. High-resolution models of tropospheric delays and refractivity based on GNSS and numerical weather prediction data for alpine regions in Switzerland. J. Geod. 2019, 93, 819–835. [Google Scholar] [CrossRef] [Green Version]
- Hadas, T.; Kaplon, J.; Bosy, J.; Sierny, J.; Wilgan, K. Near-real-time regional troposphere models for the GNSS precise point positioning technique. Meas. Sci. Technol. 2013, 24, 055003. [Google Scholar] [CrossRef]
- Shi, J.; Xu, C.; Guo, J.; Yang, G. Local troposphere augmentation for real-time precise point positioning. Earth Planets Space 2014, 66, 1–13. [Google Scholar] [CrossRef] [Green Version]
- De Oliveira, P.; Morel, L.; Fund, F.; Legros, R.; Monico, J.; Durand, S.; Durand, F. Modeling tropospheric wet delays with dense and sparse network configurations for PPP-RTK. GPS Solut. 2017, 21, 237–250. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Li, X.; Li, W.; Chen, W.; Dong, D.; Wickert, J.; Schuh, H. The impact of estimating high-resolution tropospheric gradients on multi-GNSS precise positioning. Sensors 2017, 17, 756. [Google Scholar] [CrossRef] [PubMed]
- Han, H.; Xu, T.; Wang, J. Tightly Coupled Integration of GPS Ambiguity Fixed Precise Point Positioning and MEMS-INS through a Troposphere-Constrained Adaptive Kalman Filter. Sensors 2016, 16, 1057. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Zus, F.; Ge, M.; Heinkelmann, R.; Dick, G.; Wickert, J.; Schuh, H. Tropospheric delay parameters from numerical weather models for multi-GNSS precise positioning. Atmos. Meas. Tech. 2016, 9, 5965–5973. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Li, X.; Zus, F.; Heinkelmann, R.; Dick, G.; Ge, M.; Wickert, J.; Schuh, H. Improving BeiDou real-time precise point positioning with numerical weather models. J. Geod. 2017, 91, 1019–1029. [Google Scholar] [CrossRef]
- Zheng, F.; Lou, Y.; Gu, S.; Gong, X.; Shi, C. Modeling tropospheric wet delays with national GNSS reference network in China for BeiDou precise point positioning. J. Geod. 2018, 92, 545–560. [Google Scholar] [CrossRef]
- Douša, J.; Eliaš, M.; Václavovic, P.; Eben, K.; Krč, P. A two-stage tropospheric correction model combining data from GNSS and numerical weather model. Gps Solut. 2018, 22, 77. [Google Scholar] [CrossRef]
- Lu, C.; Chen, X.; Liu, G.; Dick, G.; Wickert, J.; Jiang, X.; Zheng, K.; Schuh, H. Real-time tropospheric delays retrieved from multi-GNSS observations and IGS real-time product streams. Remote Sens. 2017, 9, 1317. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Li, X.; Cheng, J.; Dick, G.; Ge, M.; Wickert, J.; Schuh, H. Real-time tropospheric delay retrieval from multi-GNSS PPP ambiguity resolution: Validation with final troposphere products and a numerical weather model. Remote Sens. 2018, 10, 481. [Google Scholar] [CrossRef] [Green Version]
- Pan, L.; Guo, F. Real-time tropospheric delay retrieval with GPS, GLONASS, Galileo and BDS data. Sci. Rep. 2018, 8, 17067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, A.; Xu, Z.; Ge, M.; Xu, X.; Zhu, H.; Sui, X. Estimating zenith tropospheric delays from BeiDou navigation satellite system observations. Sensors 2013, 13, 4514–4526. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Li, W.; Shi, C.; Zhao, Q.; Su, X.; Qu, L.; Liu, Z. Assessment of precipitable water vapor derived from ground-based BeiDou observations with Precise Point Positioning approach. Adv. Space Res. 2015, 55, 150–162. [Google Scholar] [CrossRef]
- Hadas, T.; Kazmierski, K.; Sośnica, K. Performance of Galileo-only dual-frequency absolute positioning using the fully serviceable Galileo constellation. GPS Solut. 2019, 23, 108. [Google Scholar] [CrossRef] [Green Version]
- European GNSS Service Centre. Available online: http://www.gsc-europa (accessed on 23 January 2020).
- Liu, G.; Zhang, X.; Li, P. Improving the Performance of Galileo Uncombined Precise Point Positioning Ambiguity Resolution Using Triple-Frequency Observations. Remote Sens. 2019, 11, 341. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Li, X.; Liu, G.; Feng, G.; Yuan, Y.; Zhang, K.; Ren, X. Triple-frequency PPP ambiguity resolution with multi-constellation GNSS: BDS and Galileo. J. Geod. 2019, 1–18. [Google Scholar] [CrossRef]
- Li, X.; Liu, G.; Li, X.; Zhou, F.; Feng, G.; Yuan, Y.; Zhang, K. Galileo PPP rapid ambiguity resolution with five-frequency observations. GPS Solut. 2020, 24, 24. [Google Scholar] [CrossRef]
- Deo, M.; El-Mowafy, A. Triple-frequency GNSS models for PPP with float ambiguity estimation: Performance comparison using GPS. Surv. Rev. 2018, 50, 249–261. [Google Scholar] [CrossRef] [Green Version]
- Guo, F.; Zhang, X.; Wang, J.; Ren, X. Modeling and assessment of triple-frequency BDS precise point positioning. J. Geod. 2016, 90, 1223–1235. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction. Bull. Géod. 1973, 107, 13–34. [Google Scholar] [CrossRef]
- Vaclavovic, P.; Dousa, J.; Gyori, G. G-Nut software library-state of development and first results. Acta Geodyn. Geomater. 2013, 10, 431–436. [Google Scholar] [CrossRef] [Green Version]
- Dousa, J.; Vaclavovic, P. Real-time zenith tropospheric delays in support of numerical weather prediction applications. Adv. Space Res. 2014, 53, 1347–1358. [Google Scholar] [CrossRef]
- Douša, J.; Václavovic, P.; Zhao, L.; Kačmařík, M. New adaptable all-in-one strategy for estimating advanced tropospheric parameters and using real-time orbits and clocks. Remote Sens. 2018, 10, 232. [Google Scholar] [CrossRef] [Green Version]
- Vaclavovic, P.; Dousa, J. Backward smoothing for precise GNSS applications. Adv. Space Res. 2015, 56, 1627–1634. [Google Scholar] [CrossRef]
- European GNSS (Galileo) Initial Service, Open Service (OS) Service Definition Document (SDD), Issue 1.1, European Union, May 2019. Available online: http://www.gsc-europa.eu (accessed on 23 January 2020).
- Han, S.; Rizos, C. The Impact of Two Additional Civilian GPS Frequencies on Ambiguity Resolution Strategies. In 55th National Meeting US Institute of Navigation, “ Navigational Technology for the 21st Century”; The Institute of Navigation: Manassas, VA, USA, 2000; pp. 28–30. [Google Scholar]
- Loyer, S.; Perosanz, F.; Mercier, F.; Capdeville, H.; Marty, J.-C. Zero-difference GPS ambiguity resolution at CNES–CLS IGS Analysis Center. J. Geod. 2012, 86, 991–1003. [Google Scholar] [CrossRef]
- Prange, L.; Dach, R.; Lutz, S.; Schaer, S.; Jäggi, A. The CODE MGEX Orbit and Clock Solution; Springer: Cham, Switzerland, 2015; pp. 767–773. [Google Scholar] [CrossRef] [Green Version]
- Kazmierski, K.; Sośnica, K.; Hadas, T. Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 2018, 22, 11. [Google Scholar] [CrossRef] [Green Version]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. Assessment of precise orbit and clock products for Galileo, BeiDou, and QZSS from IGS Multi-GNSS Experiment (MGEX). GPS Solut. 2017, 21, 279–290. [Google Scholar] [CrossRef]
- Ejigu, Y.G.; Hunegnaw, A.; Abraha, K.E.; Teferle, F.N. Impact of GPS antenna phase center models on zenith wet delay and tropospheric gradients. GPS Solut. 2019, 23. [Google Scholar] [CrossRef]
- Kacmarik, M.; Dousa, J.; Zus, F.; Vaclavovic, P.; Balidakis, K.; Dick, G.; Wickert, J. Sensitivity of GNSS tropospheric gradients to processing options. Ann. Geophys. 2019, 37, 429–446. [Google Scholar] [CrossRef] [Green Version]
- Pacione, R.; Pace, B.; Vedel, H.; Haan, S.D.; Lanotte, R.; Vespe, F. Combination methods of tropospheric time series. Adv. Space Res. 2011, 47, 323–335. [Google Scholar] [CrossRef]
- Buist, P.; Mozo, A.; Tork, H. Overview of the Galileo Reference Centre: Mission, Architecture and Operational Concept. In Proceedings of the 30th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 1485–1495. [Google Scholar]
- Buist, P.; Porretta, M.; Mozo, A.; Tork, H. The Galileo Reference Centre and Its Role in the Galileo Service Provision. In Proceedings of the 69th International Astronautical Congress (IAC), Bremen, Germany, 1–5 October 2018. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Strategies |
|---|---|
| Estimator | Forward Kalman/Backward smoothing |
| Satellite orbits | Fixed |
| Satellite clock offsets | Fixed |
| Observations | Carrier phase and pseudorange observations |
| Observation weighting | Elevation-dependent weight |
| Elevation mask angle | 5 degree |
| Station displacement | Solid Earth tides, ocean tide loading, IERS Convention 2010 |
| Earth rotation parameters | Fixed |
| Antenna phase centers | Corrected with “igs14_ wwww.atx” file |
| Zenith Tropospheric Delay | ZHD: Saastamoinen model ZWD: estimated with random-walk Mapping function: GMF |
| Tropospheric gradients | Estimated, epoch-wise random-walk |
| Phase-windup effect | Corrected |
| Receiver clock offset | Estimated as white noise |
| Inter-system Bias(ISB) and Inter-frequency Bias(IFB) | Estimated as constant with GPS as a reference |
| Station coordinates | Static: estimated and modeled as constants |
| Initial phase ambiguities | Estimated as constants in a float solution |
| Station Name | Antenna Type |
|---|---|
| MADR | AOAD/M_T NONE |
| SFER | LEIAR25 NONE |
| REUN | TRM55971.00 NONE |
| Modes | GPS | GAL |
|---|---|---|
| IF-dual | L1, L2 | E1, E5a |
| RAW-dual | L1, L2 | E1, E5a |
| RAW-multi | L1, L2, L5 | E1, E5a, E5b, E5 |
| GAL | GPS | ||
|---|---|---|---|
| Observations | Noise [m] | Observations | Noise [m] |
| IF | 0.85 | IF | 1.19 |
| E1 | 0.31 | L1, | 0.38 |
| E5a | 0.45 | L2 | 0.36 |
| E5b | 0.46 | L5 | 0.43 |
| E5 | 0.15 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Václavovic, P.; Douša, J. Performance Evaluation of Troposphere Estimated from Galileo-Only Multi-Frequency Observations. Remote Sens. 2020, 12, 373. https://doi.org/10.3390/rs12030373
Zhao L, Václavovic P, Douša J. Performance Evaluation of Troposphere Estimated from Galileo-Only Multi-Frequency Observations. Remote Sensing. 2020; 12(3):373. https://doi.org/10.3390/rs12030373
Chicago/Turabian StyleZhao, Lewen, Pavel Václavovic, and Jan Douša. 2020. "Performance Evaluation of Troposphere Estimated from Galileo-Only Multi-Frequency Observations" Remote Sensing 12, no. 3: 373. https://doi.org/10.3390/rs12030373
APA StyleZhao, L., Václavovic, P., & Douša, J. (2020). Performance Evaluation of Troposphere Estimated from Galileo-Only Multi-Frequency Observations. Remote Sensing, 12(3), 373. https://doi.org/10.3390/rs12030373