Comparison of the Remapping Algorithms for the Advanced Technology Microwave Sounder (ATMS)

Abstract
:
1. Introduction
2. Materials and Methods
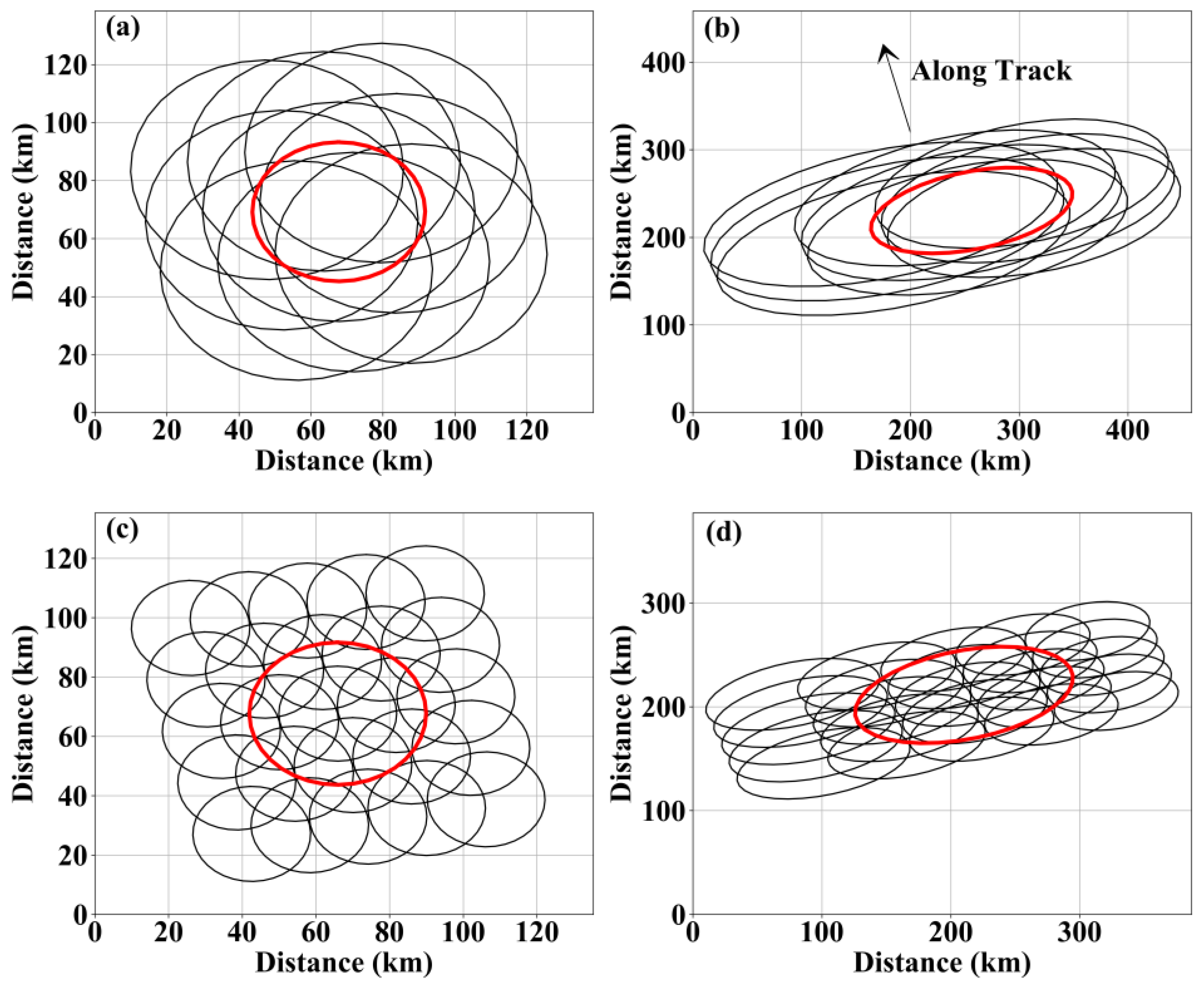
2.1. ATMS and AMSU-A/MHS Instruments and Scan Geometries
2.2. ATMS Remapping Algorithms
2.2.1. Backus–Gilbert Inversion Algorithm
2.2.2. AAPP Filter Algorithm
3. Results
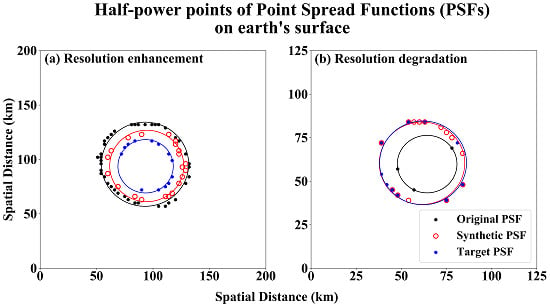
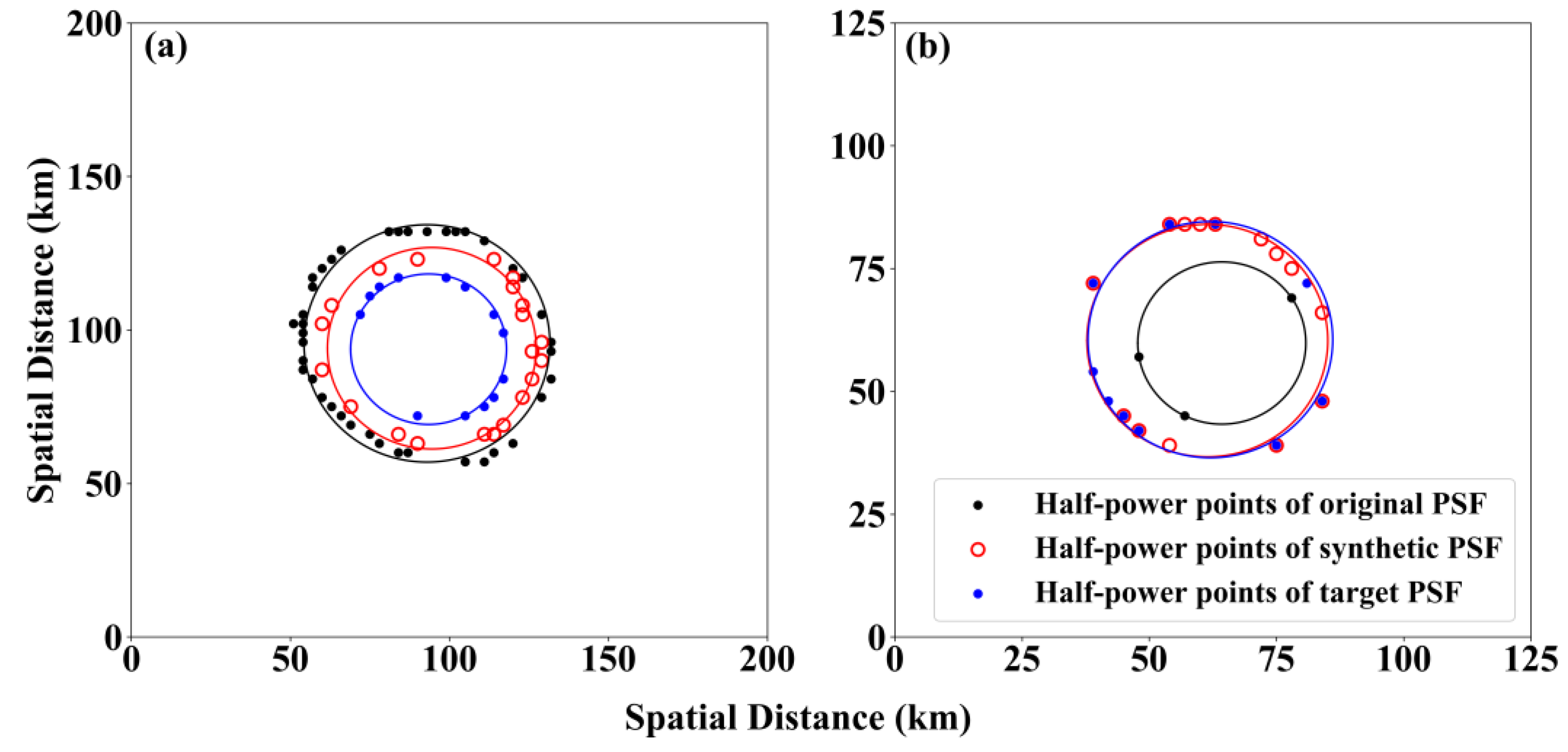
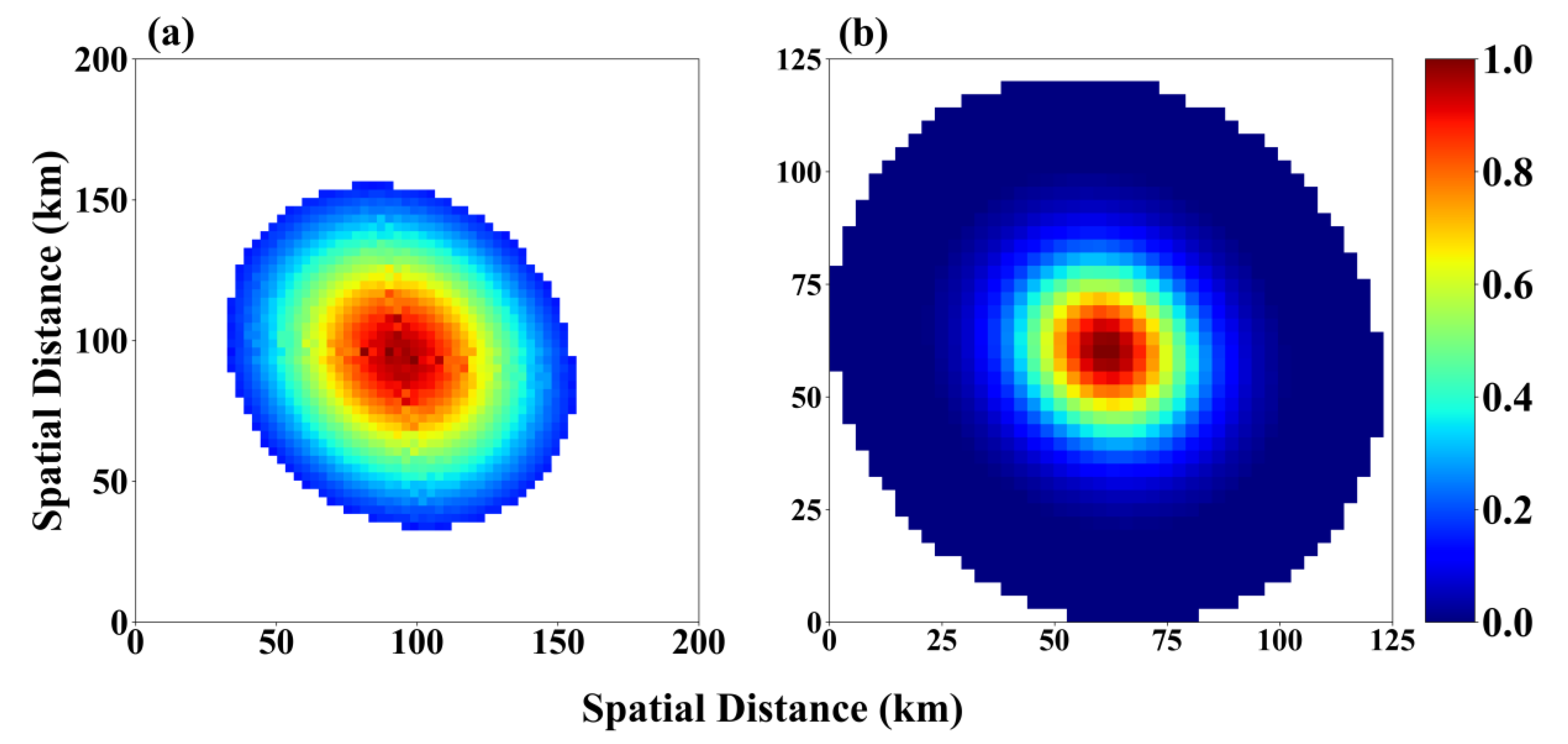
3.1. Reconstructed PSF by the BGI
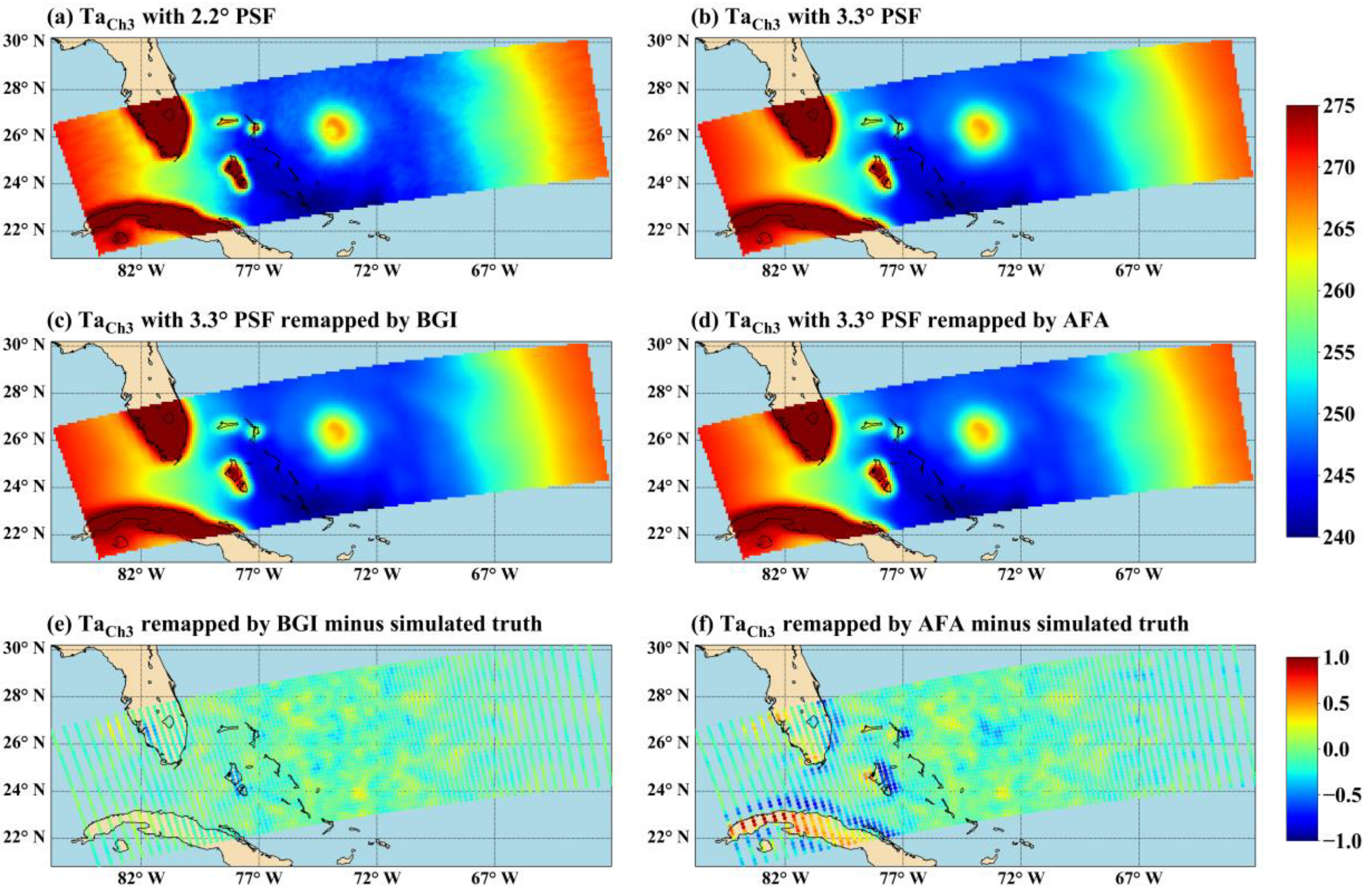
3.2. Simulation Comparison between the BGI and the AFA
3.2.1. Evaluation of Remapping Capabilities
3.2.2. The Impact of Antenna Pattern Irregularity
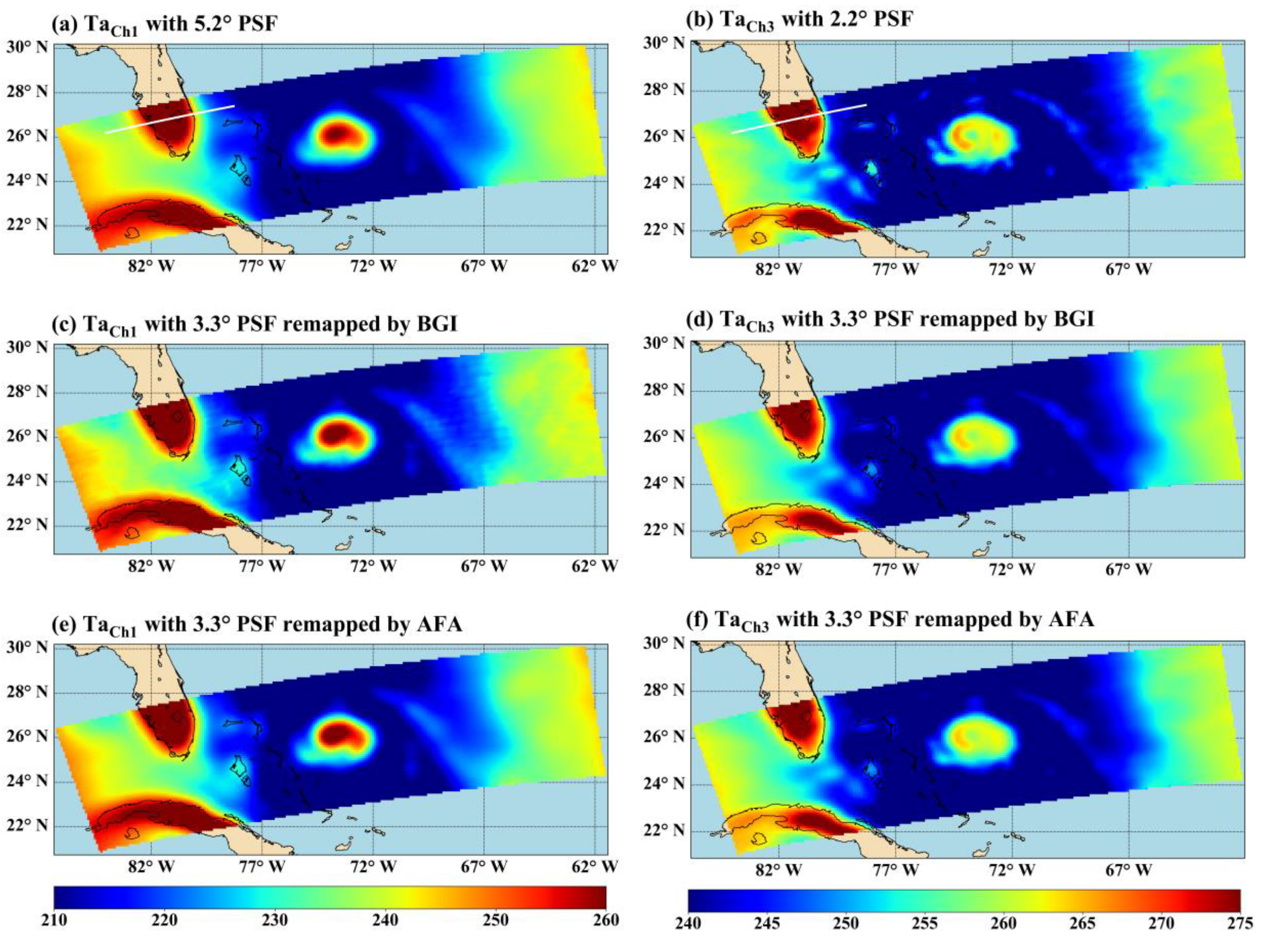
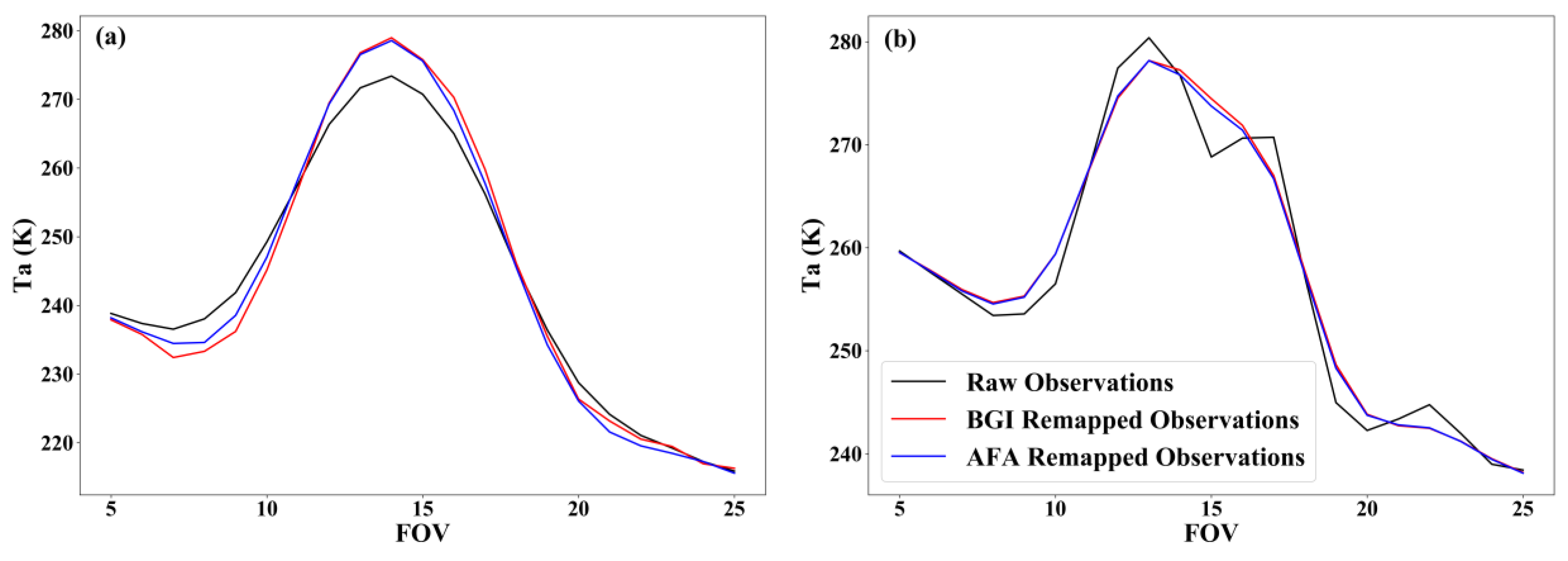
3.3. Assessing the BGI and the AFA Using Actual Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive, Volume I: Microwave Remote Sensing Fundamentals and Radiometry; Artech House: Norwood, MA, USA, 1981. [Google Scholar]
- Yang, H.; Weng, F.; Lv, L.; Lu, N.; Liu, G.; Bai, M.; Qian, Q.; He, J.; Xu, H. The FengYun-3 microwave radiation imager on-orbit verification. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4552–4560. [Google Scholar] [CrossRef]
- Goodberlet, M.A.; Swift, C.T.; Wilkerson, J.C. Ocean surface wind speed measurements of the Special Sensor Microwave/Imager (SSM/I). IEEE Trans. Geosci. Remote Sens. 1990, 28, 823–828. [Google Scholar] [CrossRef]
- Yang, H.; Zou, X.; Li, X.; You, R. Environmental data records from FengYun-3B microwave radiation imager. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4986–4993. [Google Scholar] [CrossRef]
- Li, X.; Zhao, K.; Wu, L.; Zheng, X.; Jiang, T. Spatiotemporal analysis of snow depth inversion based on the FengYun-3B microwave radiation imager: A case study in Heilongjiang Province, China. J. Appl. Remote Sens. 2014, 8, 084692. [Google Scholar] [CrossRef]
- Zou, X.; Tian, X. Hurricane Warm-Core Retrievals from AMSU-A and Remapped ATMS Measurements with Rain Contamination Eliminated. J. Geophys. Res. Atmos. 2018, 123, 10815–10829. [Google Scholar] [CrossRef]
- Yang, S.; Weng, F.; Yan, B.; Sun, N.; Goldberg, M. Special Sensor Microwave Imager (SSM/I) intersensor calibration using a simultaneous conical overpass technique. J. Appl. Meteorol. Climatol. 2011, 50, 77–95. [Google Scholar] [CrossRef]
- Wu, S.; Chen, J. Instrument performance and cross calibration of FY-3C MWRI. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 388–391. [Google Scholar]
- Stogryn, A. Estimates of brightness temperatures from scanning radiometer data. IEEE Trans. Antennas Propag. 1978, AP-26, 720–726. [Google Scholar] [CrossRef]
- Poe, G.A. Optimum Interpolation of Imaging Microwave Radiometer Data. IEEE Trans. Geosci. Remote Sens. 1990, 28, 800–810. [Google Scholar] [CrossRef] [Green Version]
- Farrar, M.R.; Smith, E.A. Spatial resolution enhancement of terrestrial features using deconvolved SSM/I microwave brightness temperatures. IEEE Trans. Geosci. Remote Sens. 1992, 30, 349–354. [Google Scholar] [CrossRef]
- Robinson, W.D.; Kummerow, C.; Olson, W.S. A technique for enhancing and matching the resolution of microwave measurements from the SSM/I instrument. IEEE Trans. Geosci. Remote Sens. 1992, 30, 419–427. [Google Scholar] [CrossRef]
- Long, D.G.; Daum, D.L. Spatial resolution enhancement of SSM/I data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 407–417. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Shi, J.; Jiang, L.; Du, J.; Tian, B. The development of an algorithm to enhance and match the resolution of satellite measurements from AMSR-E. Sci. China Earth Sci. 2011, 54, 410–419. [Google Scholar] [CrossRef]
- Yang, H.; Shang, J.; Lu, L.; He, J.; Xu, H. Study of channel resolution matching of spaceborne microwave radiometer and its application in MWRI of FY-3 satellite. Aerosp. Shanghai 2012, 29, 23–51. [Google Scholar]
- Yang, H.; Zou, X. Optimal ATMS Remapping algorithm for Climate Research. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7290–7296. [Google Scholar] [CrossRef]
- Sethmann, R.; Burns, B.A.; Heygster, G.C. Spatial resolution improvement of SSM/I data with image restoration techniques. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1144–1151. [Google Scholar] [CrossRef]
- Piles, M.; Camps, A.; Vall-llossera, M.; Talone, M. Spatial-resolution enhancement of SMOS data: A deconvolution-based approach. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2182–2192. [Google Scholar] [CrossRef]
- Liu, D.; Liu, K.; Lv, C.; Miao, J. Resolution enhancement of passive microwave images from geostationary Earth orbit via a projective sphere coordinate system. J. Appl. Remote Sens. 2014, 8, 083656. [Google Scholar] [CrossRef] [Green Version]
- Migliaccio, M.; Gambardella, A. Microwave Radiometer Spatial Resolution Enhancement. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1159–1169. [Google Scholar] [CrossRef]
- Lenti, F.; Nunziata, F.; Estatico, C.; Migliaccio, M. On the spatial resolution enhancement of microwave radiometer data in Banach spaces. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1834–1842. [Google Scholar] [CrossRef]
- Long, D.G.; Hardin, P.J.; Whiting, P.T. Resolution enhancement of spaceborne scatterometer data. IEEE Trans. Geosci. Remote Sens. 1993, 31, 700–715. [Google Scholar] [CrossRef] [Green Version]
- Early, D.S.; Long, D.G. Image reconstruction and enhanced resolution imaging from irregular samples. IEEE Trans. Geosci. Remote Sens. 2001, 39, 291–302. [Google Scholar] [CrossRef] [Green Version]
- Dong, C.; Chen, C.L.; He, K.; Tang, X. Learning a Deep Convolutional Network for Image Super-Resolution; Springer International Publishing: Berlin, Germany, 2014; pp. 184–199. [Google Scholar]
- Kim, J.; Lee, J.K.; Lee, K.M. Deeply-recursive convolutional network for image super-resolution. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1637–1645. [Google Scholar]
- Shi, W.; Caballero, J.; Huszár, F.; Totz, J.; Aitken, A.P.; Bishop, R.; Rueckert, D.; Wang, Z. Real-time single image and video super-resolution using an efficient sub-pixel convolutional neural network. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1874–1883. [Google Scholar]
- Schuler, C.J.; Burger, H.C.; Harmeling, S.; Schölkopf, B. A machine learning approach for non-blind image deconvolution. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1067–1074. [Google Scholar]
- Burger, H.C.; Schuler, C.J.; Harmeling, S. Image denoising: Can plain neural networks compete with BM3D? In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 2392–2399. [Google Scholar]
- Zhang, K.; Zuo, W.; Gu, S.; Zhang, L. Learning deep CNN denoiser prior for image restoration. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2808–2817. [Google Scholar]
- Hu, W.; Zhang, W.; Chen, S.; Lv, X.; An, D.; Lighart, L. A deconvolution technology of microwave radiometer data using convolutional neural networks. Remote Sens. 2018, 10, 275. [Google Scholar] [CrossRef] [Green Version]
- Hu, W.; Li, Y.; Zhang, W.; Chen, S.; Lv, X.; Lighart, L. Spatial resolution enhancement of satellite microwave radiometer data with deep residual convolutional neural network. Remote Sens. 2019, 11, 771. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Hu, W.; Chen, S.; Zhang, W.; Guo, R.; He, J.; Ligthart, L. Spatial resolution matching of microwave radiometer data with convolutional neural network. Remote Sens. 2019, 11, 2432. [Google Scholar] [CrossRef] [Green Version]
- Hu, T.; Zheng, F.; Li, W.; Hu, W.; Tao, R. Microwave Radiometer Data Superresolution Using Image Degradation and Residual Network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8954–8967. [Google Scholar] [CrossRef]
- Backus, G.E.; Gilbert, J.F. Numerical applications of a formalism for geophysical inverse problems. Geophys. J. R. Astron. Soc. 1967, 13, 247–276. [Google Scholar] [CrossRef] [Green Version]
- Backus, G.E.; Gilbert, J.F. Resolving power of gross Earth data. Geophys. J. R. Astron. Soc. 1968, 16, 169–205. [Google Scholar] [CrossRef] [Green Version]
- Joint Polar Satellite System (JPSS) Advanced Technology Microwave Sounder (ATMS) SDR Calibration Algorithm Theoretical Basis Document (ATBD); Center for Satellite Applications and Research: College Park, MD, USA, 2013. Available online: https://www.star.nesdis.noaa.gov/jpss/documents/ATBD/D0001-M01-S01-001_JPSS_ATBD_ATMS-SDR_A.pdf (accessed on 13 February 2020).
- Atkinson, N.C. Annex to AAPP Scientific Documentation: Pre-Processing of ATMS and CrIS; Document (NWPSAF-MO-UD-027); EUMESAT and the Met Office: Devon, UK, 2011.
- Weng, F.; Zou, X.; Wang, X.; Yang, S.; Goldberg, M.D. Introduction to Suomi national polar-orbiting partnership advanced technology microwave sounder for numerical weather prediction and tropical cyclone applications. J. Geophys. Res. Atmos. 2012, 117, D19112. [Google Scholar] [CrossRef]
- Joint Polar Satellite System (JPSS) Advanced Technology Microwave Sounder (ATMS) Calibration Data Book; Document JPSS1 ATMS P/N 1362460-1 S/N 303; Northrop Grumman: Azusa, CA, USA, 2017.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beam Width (deg) | |||
|---|---|---|---|
| Original | Synthetic | Target | |
| Enhancement | 5.4 | 4.6 | 3.4 |
| Degradation | 2.3 | 3.3 | 3.3 |
| Channel | NEDT | Algorithm | RMSE (K) | Noise Component (K) |
|---|---|---|---|---|
| 1 | 0.22 | none | 2.61 | — |
| BGI | 1.59 | 0.69 | ||
| AFA | 1.54 | 0.24 | ||
| 3 | 0.32 | none | 1.14 | — |
| BGI | 0.13 | 0.09 | ||
| AFA | 0.20 | 0.11 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Yang, H. Comparison of the Remapping Algorithms for the Advanced Technology Microwave Sounder (ATMS). Remote Sens. 2020, 12, 672. https://doi.org/10.3390/rs12040672
Zhou J, Yang H. Comparison of the Remapping Algorithms for the Advanced Technology Microwave Sounder (ATMS). Remote Sensing. 2020; 12(4):672. https://doi.org/10.3390/rs12040672
Chicago/Turabian StyleZhou, Jun, and Hu Yang. 2020. "Comparison of the Remapping Algorithms for the Advanced Technology Microwave Sounder (ATMS)" Remote Sensing 12, no. 4: 672. https://doi.org/10.3390/rs12040672
APA StyleZhou, J., & Yang, H. (2020). Comparison of the Remapping Algorithms for the Advanced Technology Microwave Sounder (ATMS). Remote Sensing, 12(4), 672. https://doi.org/10.3390/rs12040672