Mapping the Historical Shipwreck Figaro in the High Arctic Using Underwater Sensor-Carrying Robots

 ,
,  , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
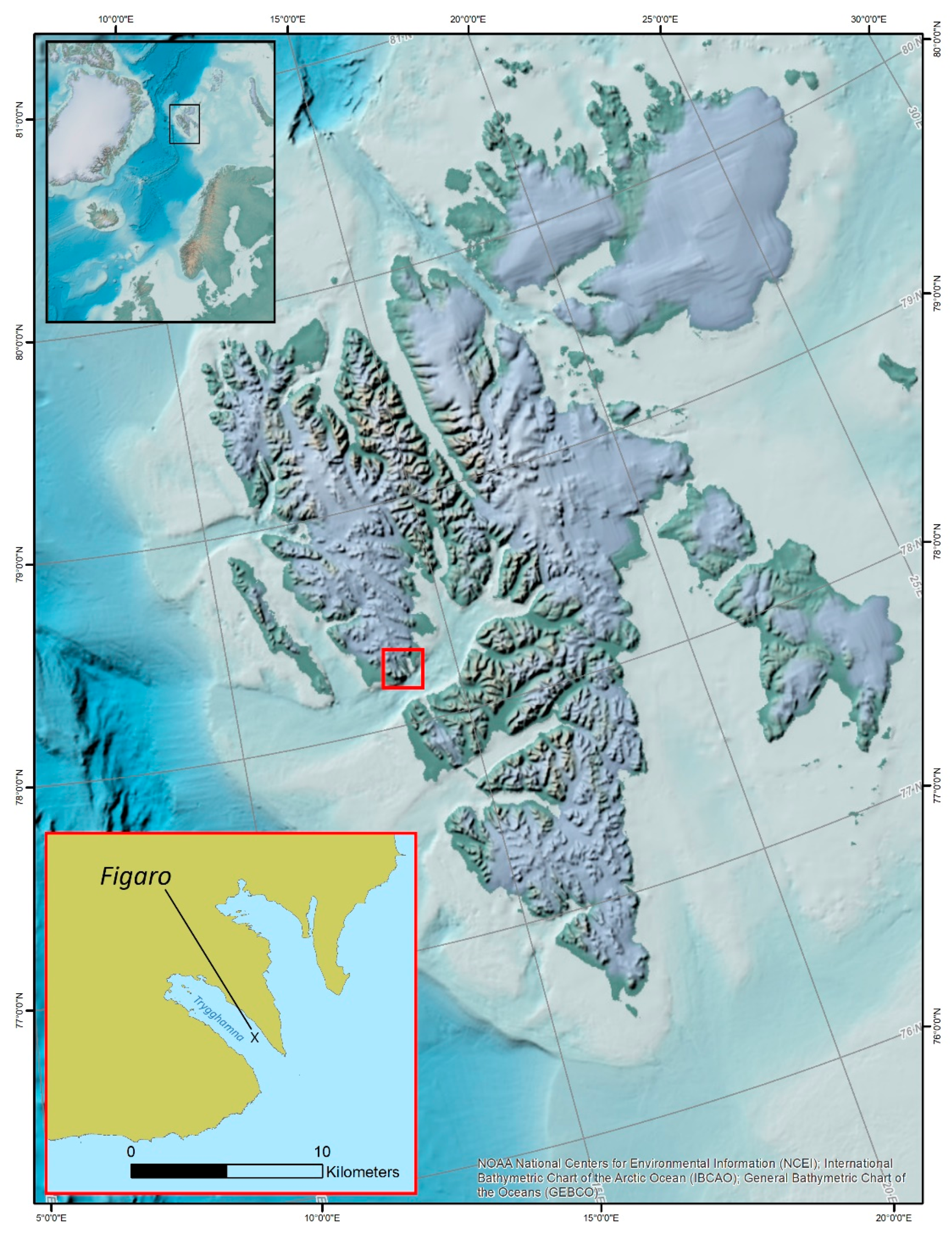
2.1. Study Area
2.2. Autonomous Underwater Vehicle (AUV) and Mini-Remotely Operated Vehicle (ROV) Survey 2015
2.3. ROV Mapping 2016
2.4. Photogrammetry Data Acquisition
2.5. Photogrammetry Data Processing
2.6. Acquisition of Underwater Hyperspectral Imagery
2.7. Processing of Underwater Hyperspectral Imagery
2.8. Supervised Classification of Underwater Hyperspectral Imagery
3. Results
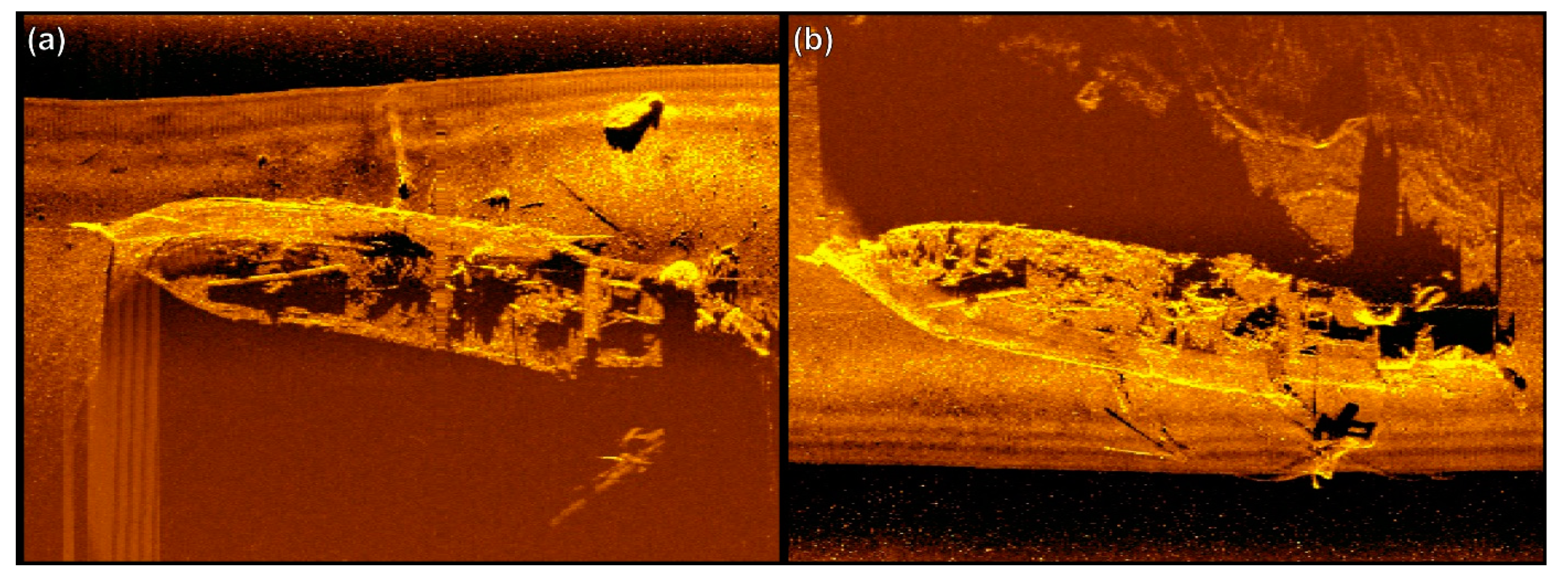
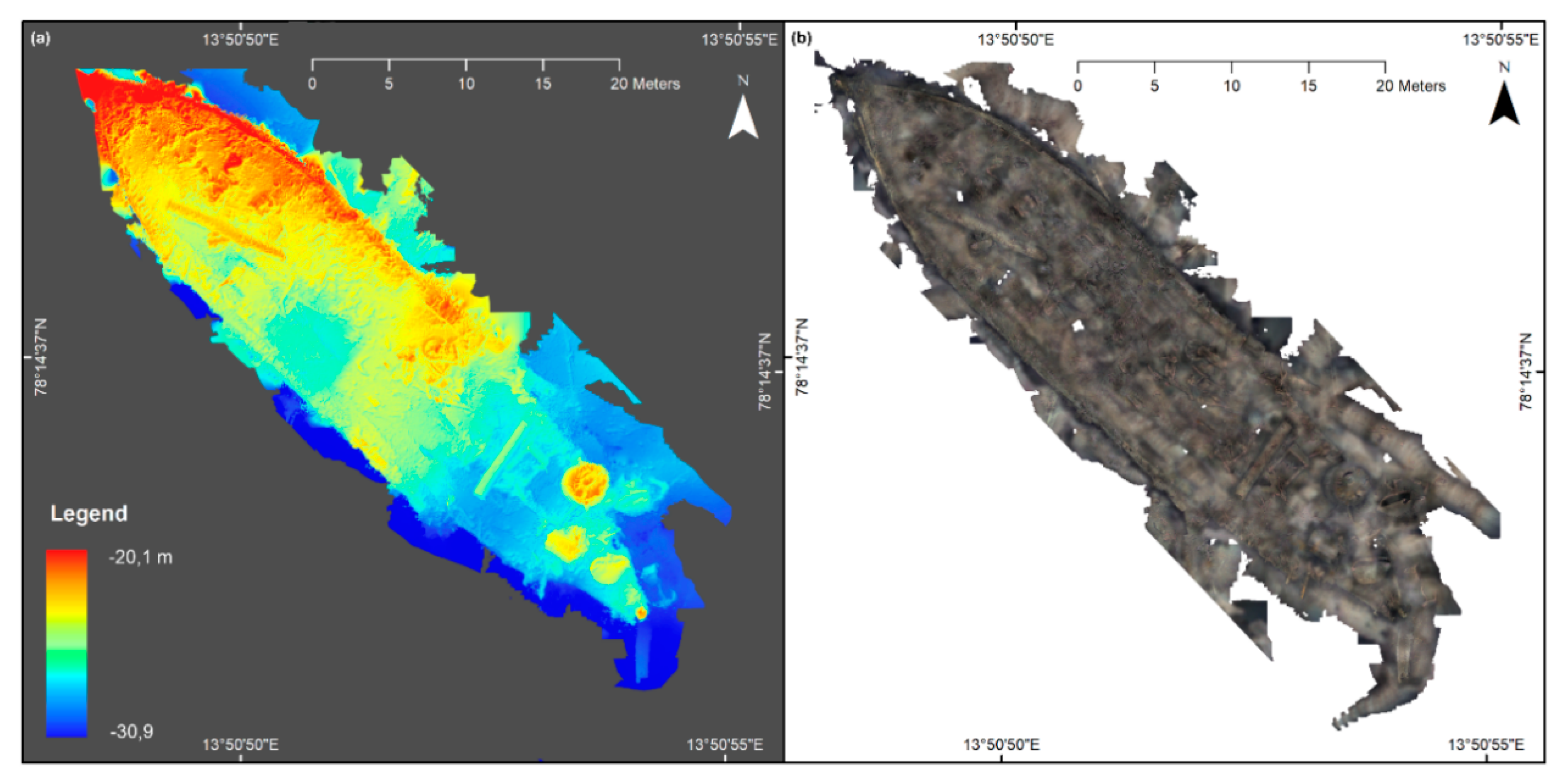
3.1. AUV and Mini-ROV 2015 Results
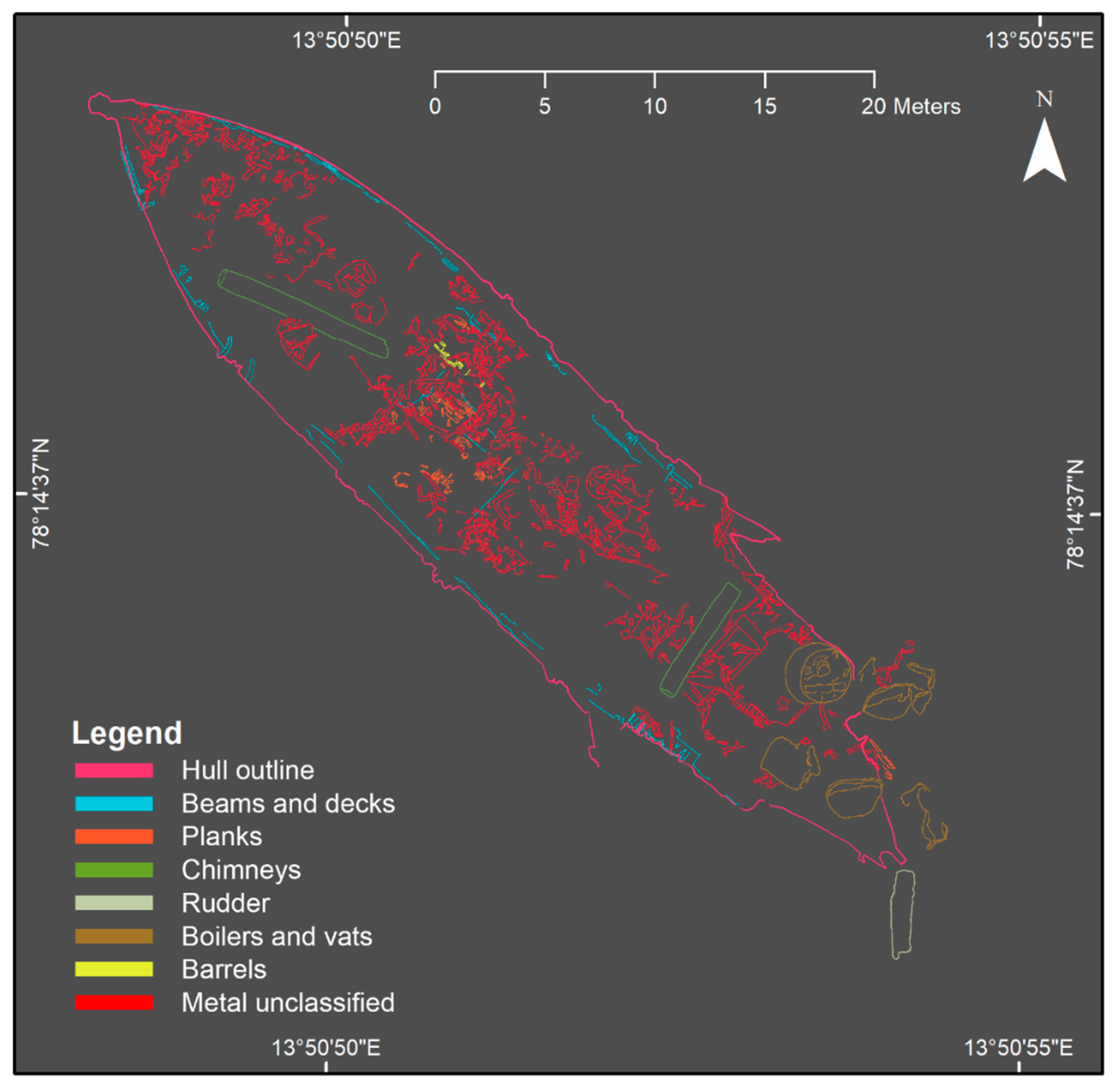
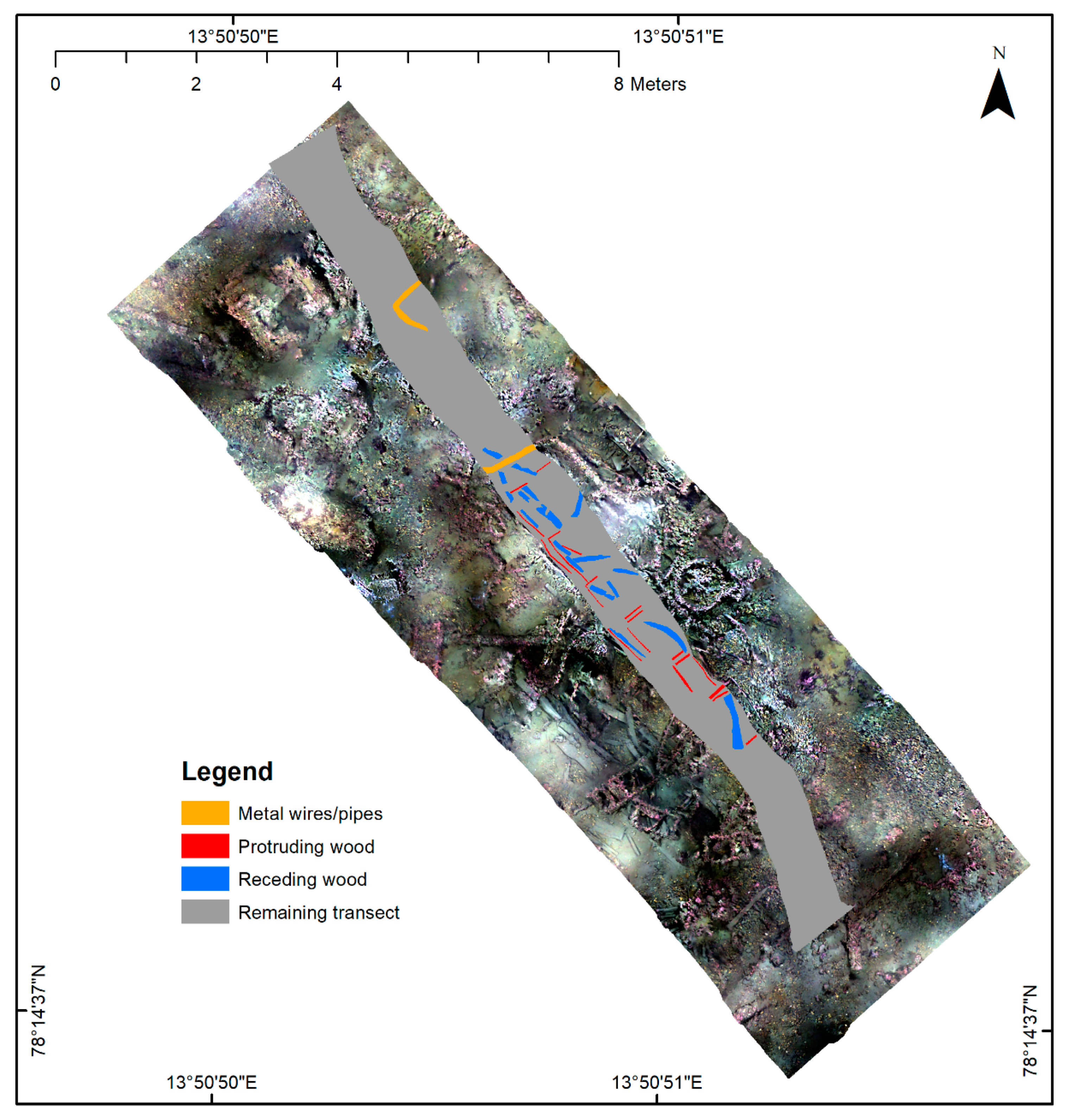
3.2. ROV 2016 Photogrammetry Results
3.2.1. Wood
3.2.2. Metal
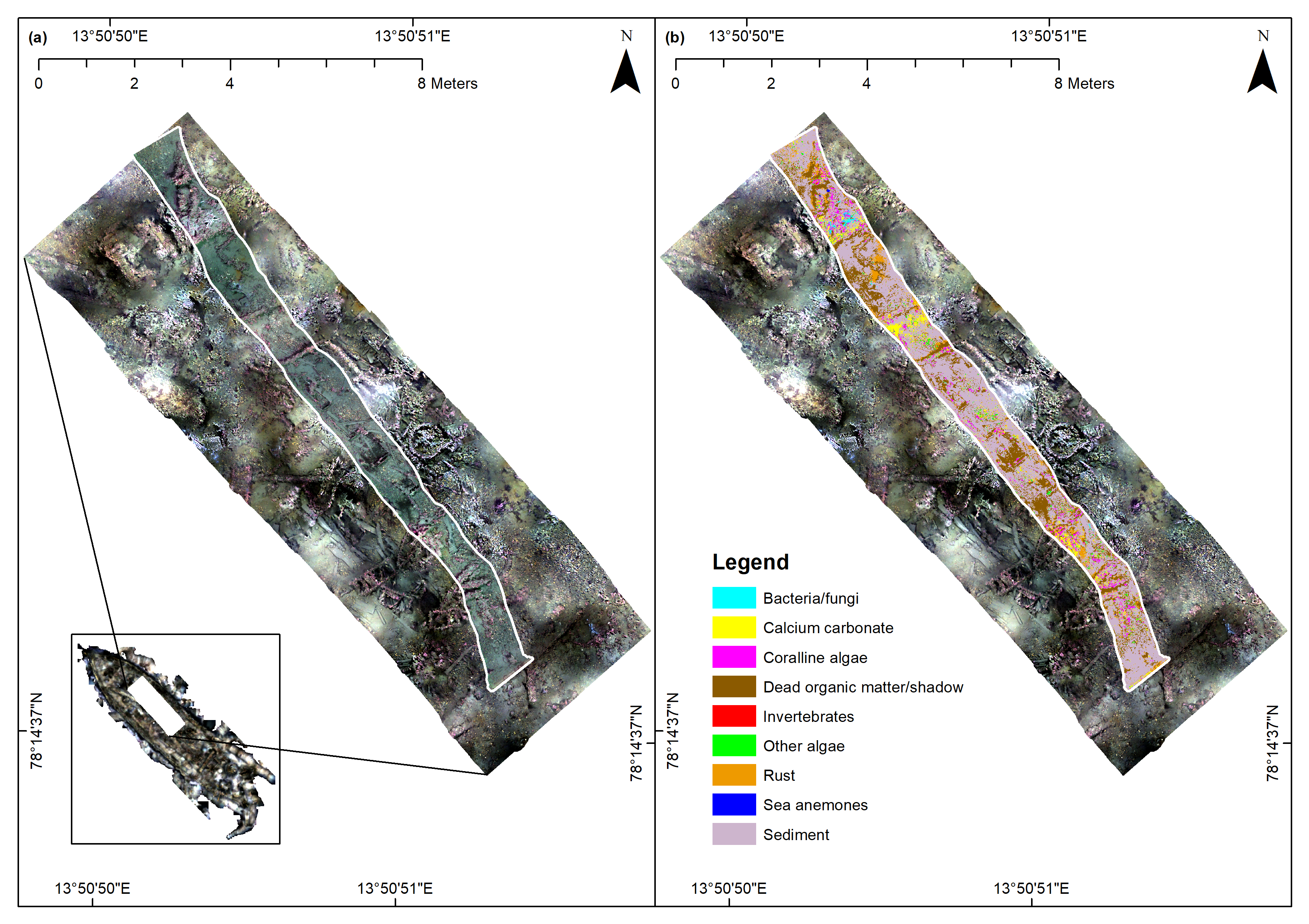
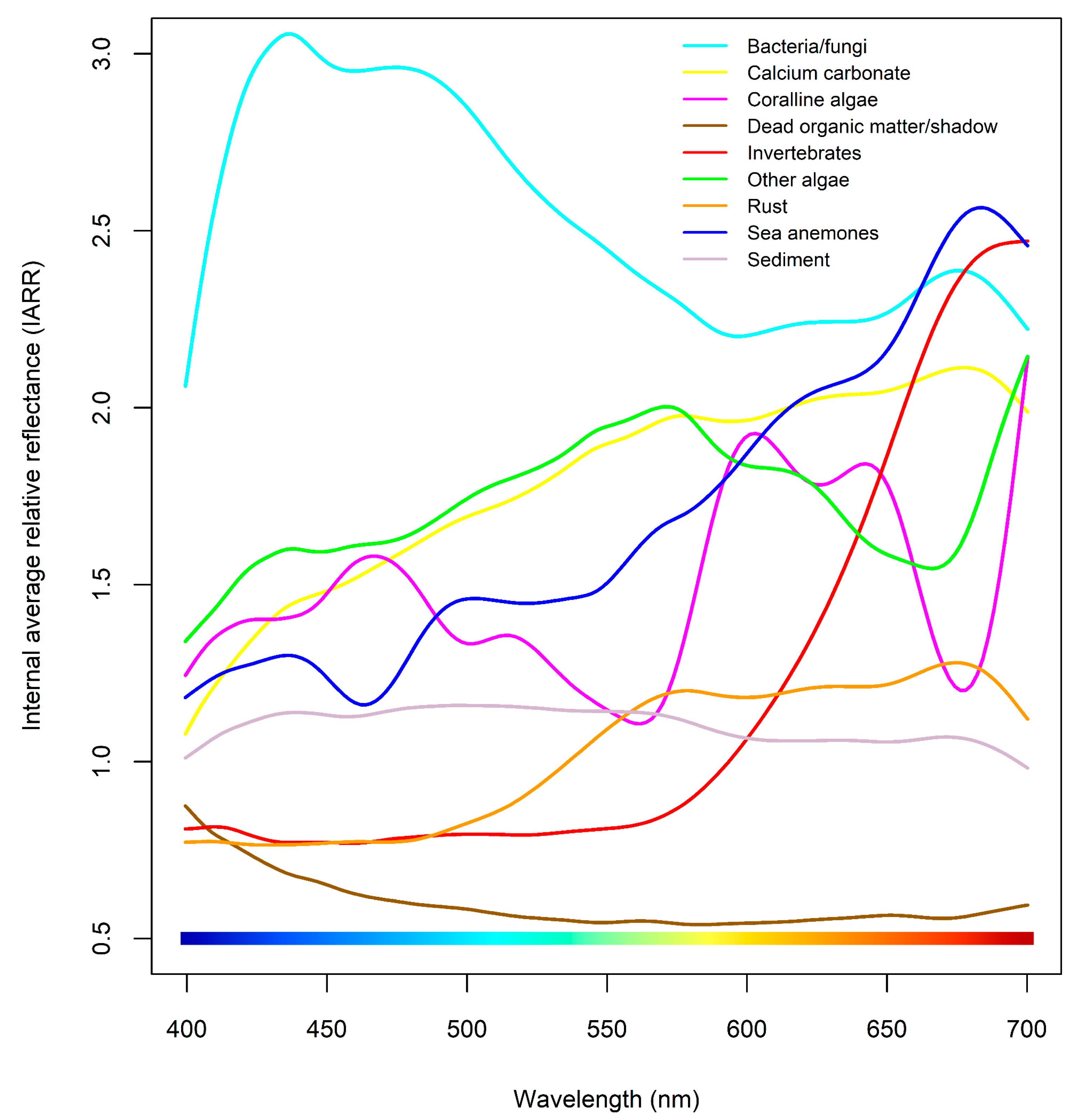
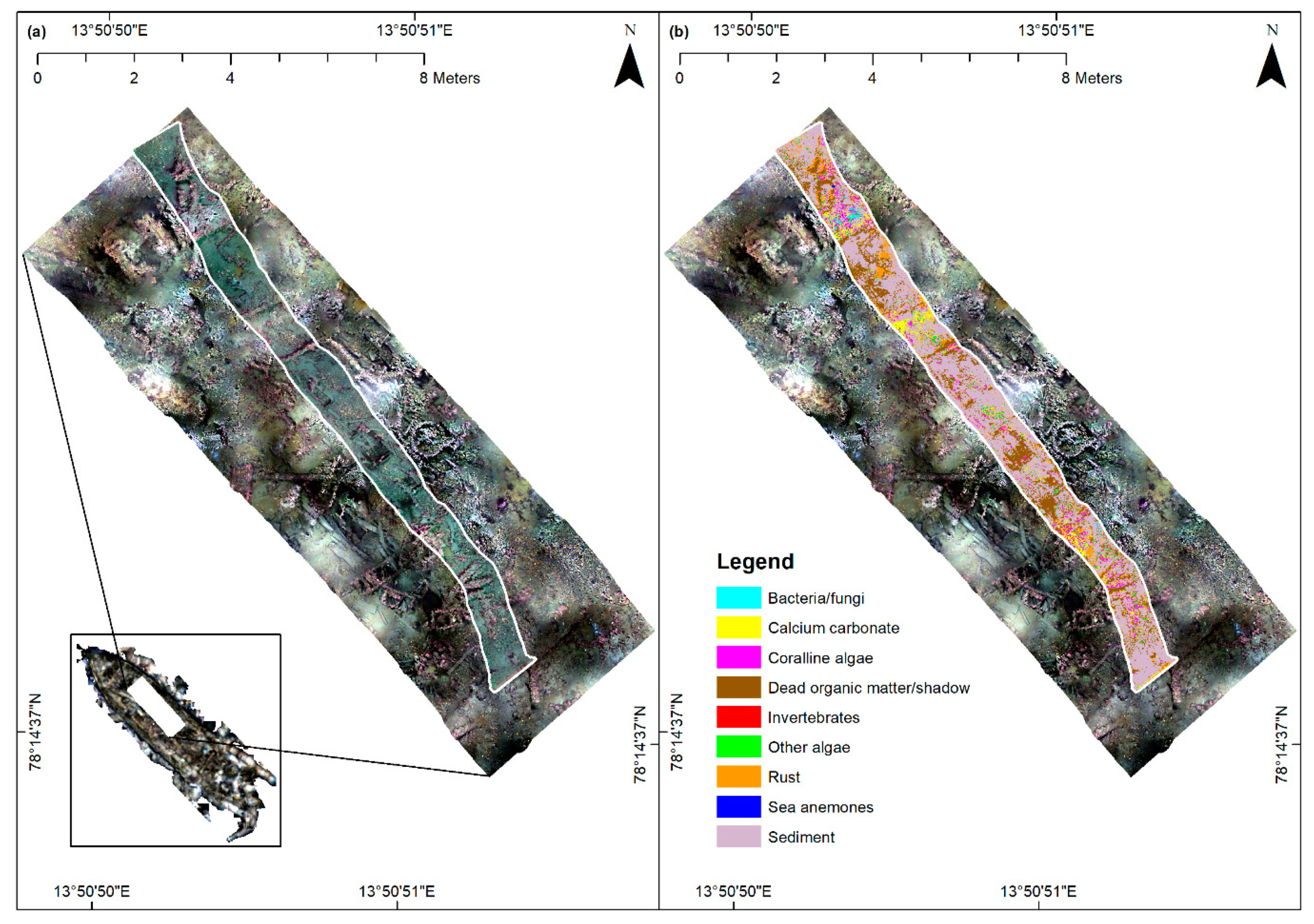
3.3. ROV 2016 Underwater Hyperspectral Imaging (UHI) Results
4. Discussion
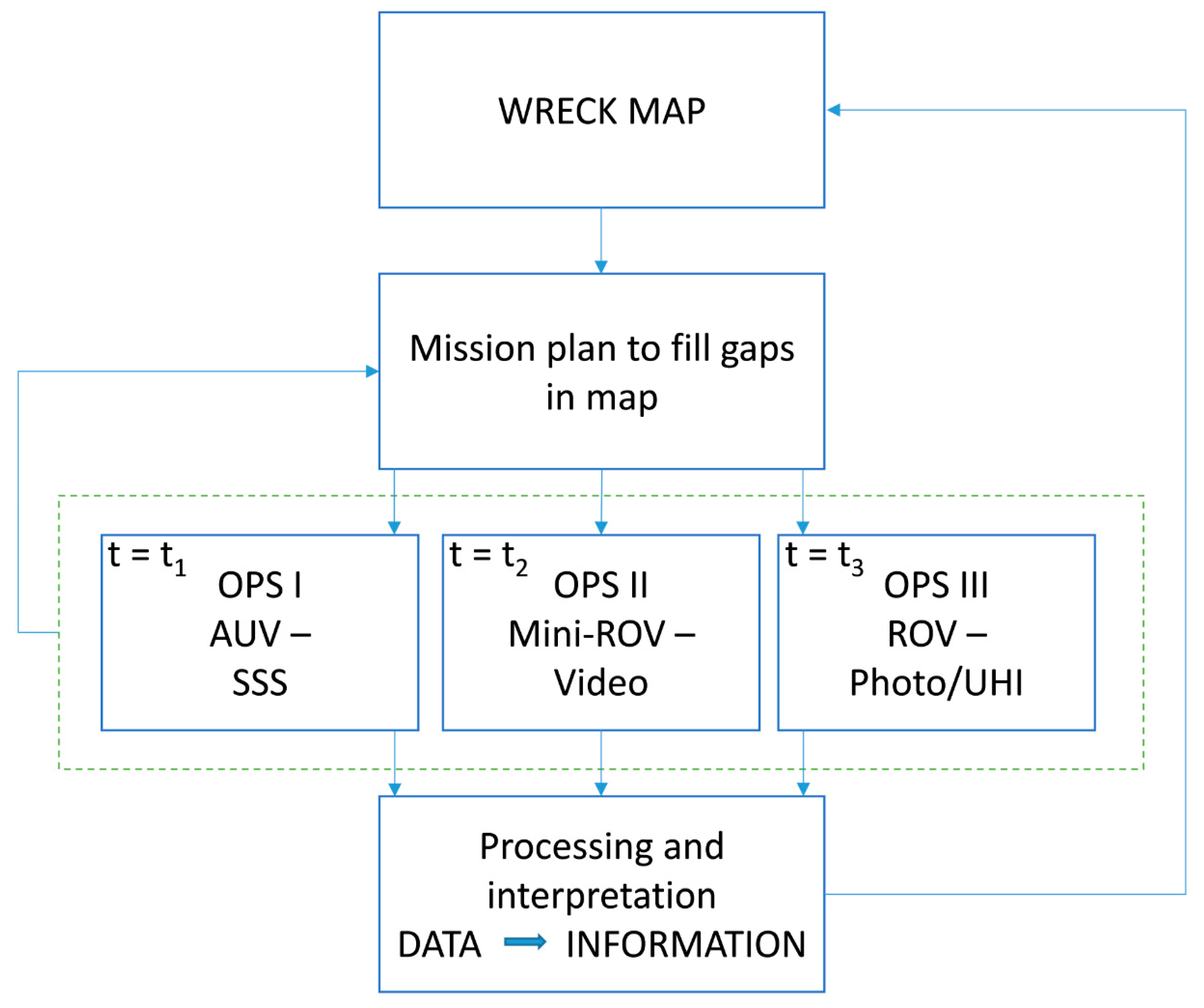
4.1. Use of Underwater Robotics and Sensors for Mapping a Wreck Site
4.2. Data Quality of Underwater Hyperspectral Imagery
4.3. Supervised Classification of Underwater Hyperspectral Imagery
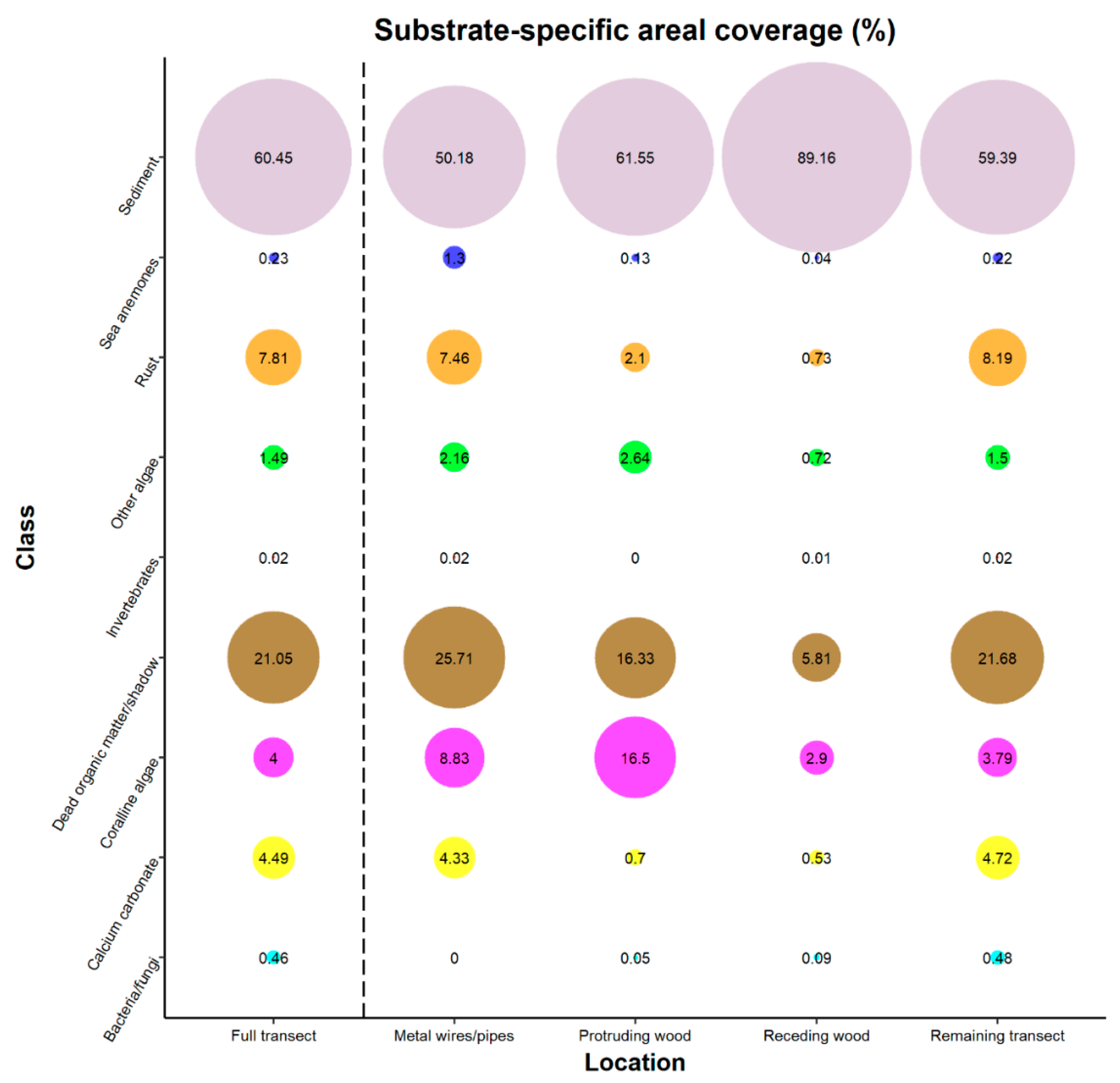
4.4. Biofouling Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

References
- UNESCO. Available online: http://www.unesco.org/new/en/culture/themes/underwater-cultural-heritage/underwater-cultural-heritage/wrecks/ (accessed on 28 February 2020).
- Garcia, E.G.; Ragnarsson, S.A.; Steingrimsson, S.A.; Nævestad, D.; Haraldsson, H.; Fosså, J.H.; Tendal, O.S.; Eiríksson, H. Bottom Trawling and Scallop Dredging in the Arctic: Impacts of Fishing on Non-Target Species, Vulnerable Habitats, and Cultural Heritage; Nordic Council of Ministers: Copenhagen, Denmark, 2006. [Google Scholar]
- Geiger, J.; Mitchell, A. Franklin’s Lost Ship: The Historic Discovery of HMS Erebus, 1st ed.; HarperCollins Publishers: New York, NY, USA, 2015. [Google Scholar]
- Grenier, R.; Bernier, M.-A.; Stevens, W. The Underwater Archaeology of Red Bay: Basque Shipbuilding and Whaling in the 16th Century, 1st ed.; Parks Canada: Halifax, NS, Canada, 2007. [Google Scholar]
- Sørensen, A.J.; Ludvigsen, M.; Norgren, P.; Ødegård, Ø.; Cottier, F. Sensor-Carrying Platforms. In POLAR NIGHT Marine Ecology, 1st ed.; Berge, J., Johnsen, G., Cohen, J.H., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 241–275. [Google Scholar]
- Sørensen, A.J.; Dukan, F.; Ludvigsen, M.; Fernandes, D.A.; Candeloro, M. Development of Dynamic Positioning and Tracking System for the ROV Minerva. In Further Advances in Unmanned Marine Vehicles, 1st ed.; Roberts, G.N., Sutton, R., Eds.; The Institution of Engineering and Technology: London, UK, 2012; pp. 113–128. [Google Scholar]
- Nornes, S.M.; Ludvigsen, M.; Ødegard, Ø.; Sørensen, A.J. Underwater photogrammetric mapping of an intact standing steel wreck with ROV. IFAC-PapersOnLine 2015, 48, 206–211. [Google Scholar] [CrossRef]
- Drap, P. Underwater Photogrammetry for Archaeology. In Special Applications of Photogrammetry, 1st ed.; Da Silva, D.C., Ed.; IntechOpen: London, UK, 2012; pp. 111–136. [Google Scholar]
- Yamafune, K. Using Computer Vision Photogrammetry (Agisoft Photoscan) to Record and Analyze Underwater Shipwreck Sites. Ph.D. Thesis, Texas A & M University, College Station, TX, USA, 10 March 2016. [Google Scholar]
- Johnson Roberson, M.; Pizarro, O.; Williams, S.B.; Mahon, I. Generation and visualization of large-scale three-dimensional reconstructions from underwater robotic surveys. J. Field Robot. 2010, 27, 21–51. [Google Scholar] [CrossRef]
- Nornes, S.M. Guidance and Control of Marine Robotics for Ocean Mapping and Monitoring. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 21 June 2018. [Google Scholar]
- Dumke, I.; Ludvigsen, M.; Ellefmo, S.L.; Søreide, F.; Johnsen, G.; Murton, B.J. Underwater hyperspectral imaging using a stationary platform in the Trans-Atlantic Geotraverse hydrothermal field. IEEE Trans. Geosci. Remote Sens. 2018, 57, 2947–2962. [Google Scholar] [CrossRef] [Green Version]
- Dumke, I.; Nornes, S.M.; Purser, A.; Marcon, Y.; Ludvigsen, M.; Ellefmo, S.L.; Johnsen, G.; Søreide, F. First hyperspectral imaging survey of the deep seafloor: High-resolution mapping of manganese nodules. Remote Sens. Environ. 2018, 209, 19–30. [Google Scholar] [CrossRef]
- Johnsen, G.; Volent, Z.; Dierssen, H.; Pettersen, R.; Ardelan, M.; Søreide, F.; Fearns, P.; Ludvigsen, M.; Moline, M. Underwater hyperspectral imagery to create biogeochemical maps of seafloor properties. In Subsea Optics and Imaging, 1st ed.; Watson, J., Zielinski, O., Eds.; Woodhead Publishing Limited: Cambridge, UK, 2013; pp. 508–535. [Google Scholar]
- Mogstad, A.A.; Johnsen, G.; Ludvigsen, M. Shallow-Water Habitat Mapping using Underwater Hyperspectral Imaging from an Unmanned Surface Vehicle: A Pilot Study. Remote Sens. 2019, 11, 685. [Google Scholar] [CrossRef]
- Kruse, F.A. Use of airborne imaging spectrometer data to map minerals associated with hydrothermally altered rocks in the Northern Grapevine Mountains, Nevada, and California. Remote Sens. Environ. 1988, 24, 31–51. [Google Scholar] [CrossRef]
- Green, A.A.; Berman, M.; Switzer, P.; Craig, M.D. A transformation for ordering multispectral data in terms of image quality with implications for noise removal. IEEE Trans. Geosci. Remote Sens. 1988, 26, 65–74. [Google Scholar] [CrossRef] [Green Version]
- Camps-Valls, G. Robust support vector method for hyperspectral data classification and knowledge discovery. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1530–1542. [Google Scholar] [CrossRef]
- Wu, X. Top 10 algorithms in data mining. Knowl. Inf. Syst. 2008, 14, 1–37. [Google Scholar] [CrossRef] [Green Version]
- Kavzoglu, T.; Colkesen, I. A kernel functions analysis for support vector machines for land cover classification. Int. J. Appl. Earth Obs. Geoinform. 2009, 11, 352–359. [Google Scholar] [CrossRef]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef] [Green Version]
- Meyer, D.; Dimitriadou, E.; Hornik, K.; Weingessel, A.; Leisch, F. e1071: Misc Functions of the Department of Statistics, Probability Theory Group (Formerly: E1071), TU Wien. R Package Version 1.7-1. Available online: https://CRAN.R-project.org/package=e1071 (accessed on 6 November 2019).
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ødegård, Ø.; Hansen, R.E.; Singh, H.; Maarleveld, T.J. Archaeological use of Synthetic Aperture Sonar on deepwater wreck sites in Skagerrak. J. Archaeol. Sci. 2018, 89, 1–13. [Google Scholar] [CrossRef]
- Railkin, A.I. Marine Biofouling: Colonization Processes and Defenses, 1st ed.; CRC press: Boca Raton, FL, USA, 2003; pp. 1–23, 75–102, 167–177, 231–233. [Google Scholar]
- Ødegård, Ø.; Sørensen, A.J.; Hansen, R.E.; Ludvigsen, M. A new method for underwater archaeological surveying using sensors and unmanned platforms. IFAC-PapersOnLine 2016, 49, 486–493. [Google Scholar] [CrossRef]
- Drap, P.; Papini, O.; Merad, D.; Pasquet, J.; Royer, J.-P.; Nawaf, M.M.; Saccone, M.; Ben Ellefi, M.; Chemisky, B.; Seinturier, J.; et al. Deepwater Archaeological Survey: An Interdisciplinary and Complex Process. In 3D Recording and Interpretation for Maritime Archaeology, 1st ed.; McCarthy, J.K., Benjamin, J., Winton, T., van Duivenvoorde, W., Eds.; Springer International Publishing: Cham, Germany, 2019; pp. 135–153. [Google Scholar]
- Ødegård, Ø.; Mogstad, A.A.; Johnsen, G.; Sørensen, A.J.; Ludvigsen, M. Underwater hyperspectral imaging: A new tool for marine archaeology. Appl. Opt. 2018, 57, 3214–3223. [Google Scholar] [CrossRef] [Green Version]
- Church, R.A.; Warren, D.J.; Irion, J.B. Analysis of deepwater shipwrecks in the Gulf of Mexico: Artificial reef effect of six World War II shipwrecks. Oceanography 2009, 22, 50–63. [Google Scholar] [CrossRef]
- Beach, K.S.; Borgeas, H.B.; Nishimura, N.J.; Smith, C.M. In vivo absorbance spectra and the ecophysiology of reef macroalgae. Coral Reefs 1997, 16, 21–28. [Google Scholar] [CrossRef]
- Smith, C.M.; Alberte, R.S. Characterization of in vivo absorption features of chlorophyte, phaeophyte and rhodophyte algal species. Mar. Biol. 1994, 118, 511–521. [Google Scholar] [CrossRef]
- Galland-Irmouli, A.V.; Pons, L.; Lucon, M.; Villaume, C.; Mrabet, N.T.; Guéant, J.L.; Fleurence, J. One-step purification of R-phycoerythrin from the red macroalga Palmaria palmata using preparative polyacrylamide gel electrophoresis. J. Chromatogr. B 2000, 739, 117–123. [Google Scholar] [CrossRef]
- Hilditch, C.M.; Balding, P.; Jenkins, R.; Smith, A.J.; Rogers, L.J. R-phycoerythrin from the macroalga Corallina officinalis (Rhodophyceae) and application of a derived phycofluor probe for detecting sugar-binding sites on cell membranes. J. Appl. Phycol. 1991, 3, 345–354. [Google Scholar] [CrossRef]
- Rossano, R.; Ungaro, N.; D’Ambrosio, A.; Liuzzi, G.M.; Riccio, P. Extracting and purifying R-phycoerythrin from Mediterranean red algae Corallina elongata Ellis & Solander. J. Biotechnol. 2003, 101, 289–293. [Google Scholar] [CrossRef] [PubMed]
- Maritorena, S.; Morel, A.; Gentili, B. Diffuse reflectance of oceanic shallow waters: Influence of water depth and bottom albedo. Limnol. Oceanogr. 1994, 39, 1689–1703. [Google Scholar] [CrossRef]
- Bandaranayake, W.M. The nature and role of pigments of marine invertebrates. Nat. Prod. Rep. 2006, 23, 223–255. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, D.; van den Boogaert, I.; Miller, J.; Presswell, R.; Jouhara, H. Hydrophilic and hydrophobic materials and their applications. Energy Sources Part A 2018, 40, 2686–2725. [Google Scholar] [CrossRef]
- Hudon, C.; Bourget, E.; Legendre, P. An integrated study of the factors influencing the choice of the settling site of Balanus crenatus cyprid larvae. Can. J. Fish. Aquat. Sci. 1983, 40, 1186–1194. [Google Scholar] [CrossRef]
- Halpern, B.S.; Walbridge, S.; Selkoe, K.A.; Kappel, C.V.; Micheli, F.; D’agrosa, C.; Bruno, J.F.; Casey, K.S.; Ebert, C.; Fox, H.E. A global map of human impact on marine ecosystems. Science 2008, 319, 948–952. [Google Scholar] [CrossRef] [Green Version]
- Cresson, P.; Ruitton, S.; Harmelin-Vivien, M. Artificial reefs do increase secondary biomass production: Mechanisms evidenced by stable isotopes. Mar. Ecol. Prog. Ser. 2014, 509, 15–26. [Google Scholar] [CrossRef]
- Svane, I.B.; Petersen, J.K. On the problems of epibioses, fouling and artificial reefs, a review. Mar. Ecol. 2001, 22, 169–188. [Google Scholar] [CrossRef]
- Ødegård, Ø. Towards Autonomous Operations and Systems in Marine Archaeology. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 20 June 2018. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spectral Class | Biofouling/ Non-Biofouling | Number of Training Pixels Used for Model Calibration | Number of Test Set Pixels Used for Model Validation |
|---|---|---|---|
| Bacteria/fungi | Biofouling | 180 | 20 |
| *Calcium carbonate | Biofouling | 60 | 20 |
| Coralline algae | Biofouling | 260 | 20 |
| Dead organic matter/shadow | Non-biofouling | 50 | 20 |
| Invertebrates | Biofouling | 35 | 20 |
| Other algae | Biofouling | 95 | 20 |
| Rust | Non-biofouling | 40 | 20 |
| Sea anemones | Biofouling | 107 | 20 |
| Sediment | Non-biofouling | 50 | 20 |
| Predicted Spectral Class | True Spectral Class (Pixels) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bacteria/ Fungi | Calcium Carbonate | Coralline Algae | Dead Organic Matter/Shadow | Inverte-Brates | Other Algae | Rust | Sea Anemones | Sediment | Total | Producer Accuracy (%) | User Accuracy (%) | |
| Bacteria/ fungi | 18 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 18 | 90.00 | 100 |
| Calcium carbonate | 0 | 20 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 22 | 100 | 90.91 |
| Coralline algae | 0 | 0 | 20 | 0 | 0 | 0 | 0 | 0 | 0 | 20 | 100 | 100 |
| Dead organic matter/ shadow | 0 | 0 | 0 | 20 | 0 | 0 | 0 | 0 | 0 | 20 | 100 | 100 |
| Invertebrates | 0 | 0 | 0 | 0 | 13 | 0 | 0 | 0 | 0 | 13 | 65.00 | 100 |
| Other algae | 0 | 0 | 0 | 0 | 0 | 20 | 0 | 0 | 0 | 20 | 100 | 100 |
| Rust | 0 | 0 | 0 | 0 | 0 | 0 | 20 | 1 | 0 | 21 | 100 | 95.24 |
| Sea anemones | 0 | 0 | 0 | 0 | 7 | 0 | 0 | 17 | 0 | 24 | 85.00 | 70.83 |
| Sediment | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 20 | 22 | 100 | 90.91 |
| Total | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 180 | ||
| Overall classification accuracy: 93.33%; Kappa coefficient: 0.93 | ||||||||||||
| Substrate | Coverage of Biofouling Spectral Classes | Coverage of Non-Biofouling Spectral Classes | Chi-Squared (χ2) Comparison to Remaining Transect | |||
|---|---|---|---|---|---|---|
| Number of Pixels | % | Number of Pixels | % | χ2 Statistic | p Value | |
| Metal wires/pipes | 972 | 16.64 | 4869 | 83.36 | 207.94 | <2.2 × 10−16 |
| Protruding wood | 1229 | 20.01 | 4912 | 79.99 | 537.23 | <2.2 × 10−16 |
| Receding wood | 738 | 4.29 | 16,445 | 95.71 | 728.25 | <2.2 × 10−16 |
| Remaining transect | 44,551 | 10.73 | 370,583 | 89.27 | - | - |
| Full transect | 47,490 | 10.69 | 396,809 | 89.31 | - | - |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mogstad, A.A.; Ødegård, Ø.; Nornes, S.M.; Ludvigsen, M.; Johnsen, G.; Sørensen, A.J.; Berge, J. Mapping the Historical Shipwreck Figaro in the High Arctic Using Underwater Sensor-Carrying Robots. Remote Sens. 2020, 12, 997. https://doi.org/10.3390/rs12060997
Mogstad AA, Ødegård Ø, Nornes SM, Ludvigsen M, Johnsen G, Sørensen AJ, Berge J. Mapping the Historical Shipwreck Figaro in the High Arctic Using Underwater Sensor-Carrying Robots. Remote Sensing. 2020; 12(6):997. https://doi.org/10.3390/rs12060997
Chicago/Turabian StyleMogstad, Aksel Alstad, Øyvind Ødegård, Stein Melvær Nornes, Martin Ludvigsen, Geir Johnsen, Asgeir J. Sørensen, and Jørgen Berge. 2020. "Mapping the Historical Shipwreck Figaro in the High Arctic Using Underwater Sensor-Carrying Robots" Remote Sensing 12, no. 6: 997. https://doi.org/10.3390/rs12060997
APA StyleMogstad, A. A., Ødegård, Ø., Nornes, S. M., Ludvigsen, M., Johnsen, G., Sørensen, A. J., & Berge, J. (2020). Mapping the Historical Shipwreck Figaro in the High Arctic Using Underwater Sensor-Carrying Robots. Remote Sensing, 12(6), 997. https://doi.org/10.3390/rs12060997