From Point Cloud Data to Building Information Modelling: An Automatic Parametric Workflow for Heritage





Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
1.1. General Framework
1.2. Related Work
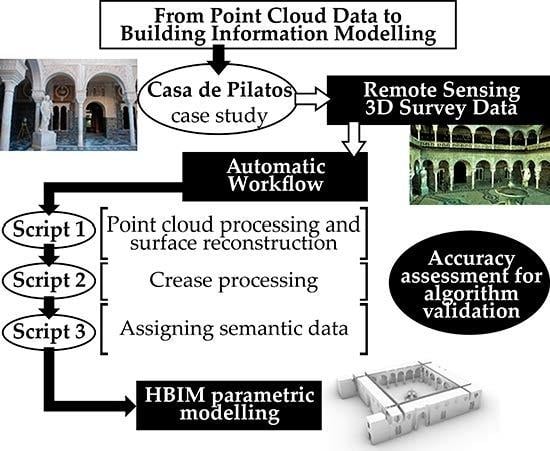
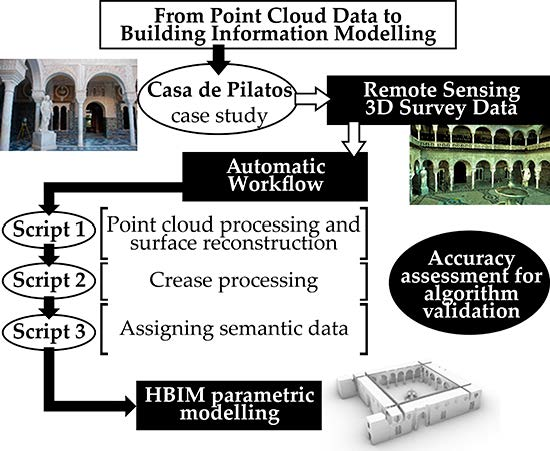
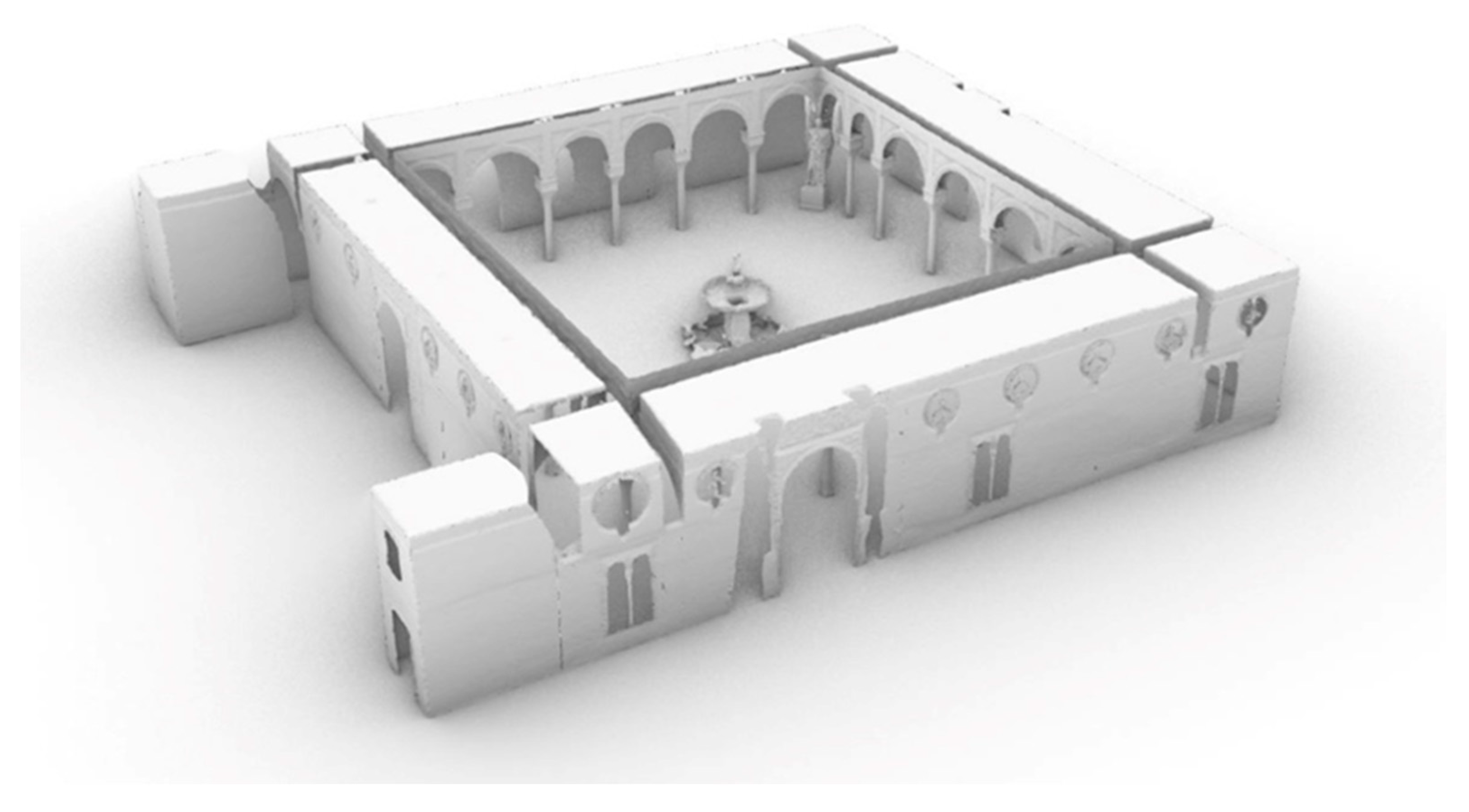
1.3. Case Study: The Main Patio Of The Casa De Pilatos
2. Methodology
2.1. The Issue of the Scan-to-HBIM Approach
2.2. Data Collection
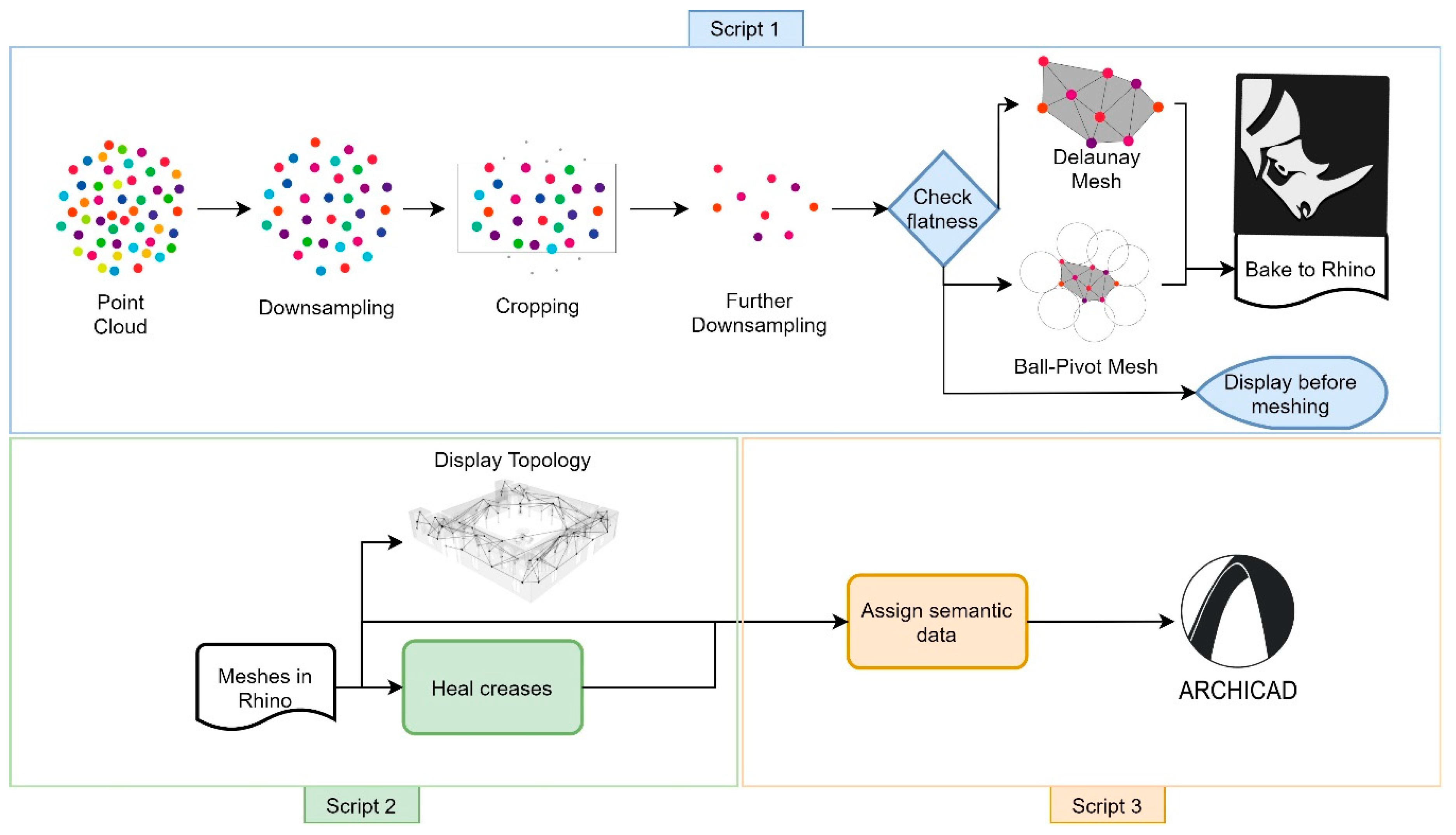
2.3. Point Cloud Meshing Workflow
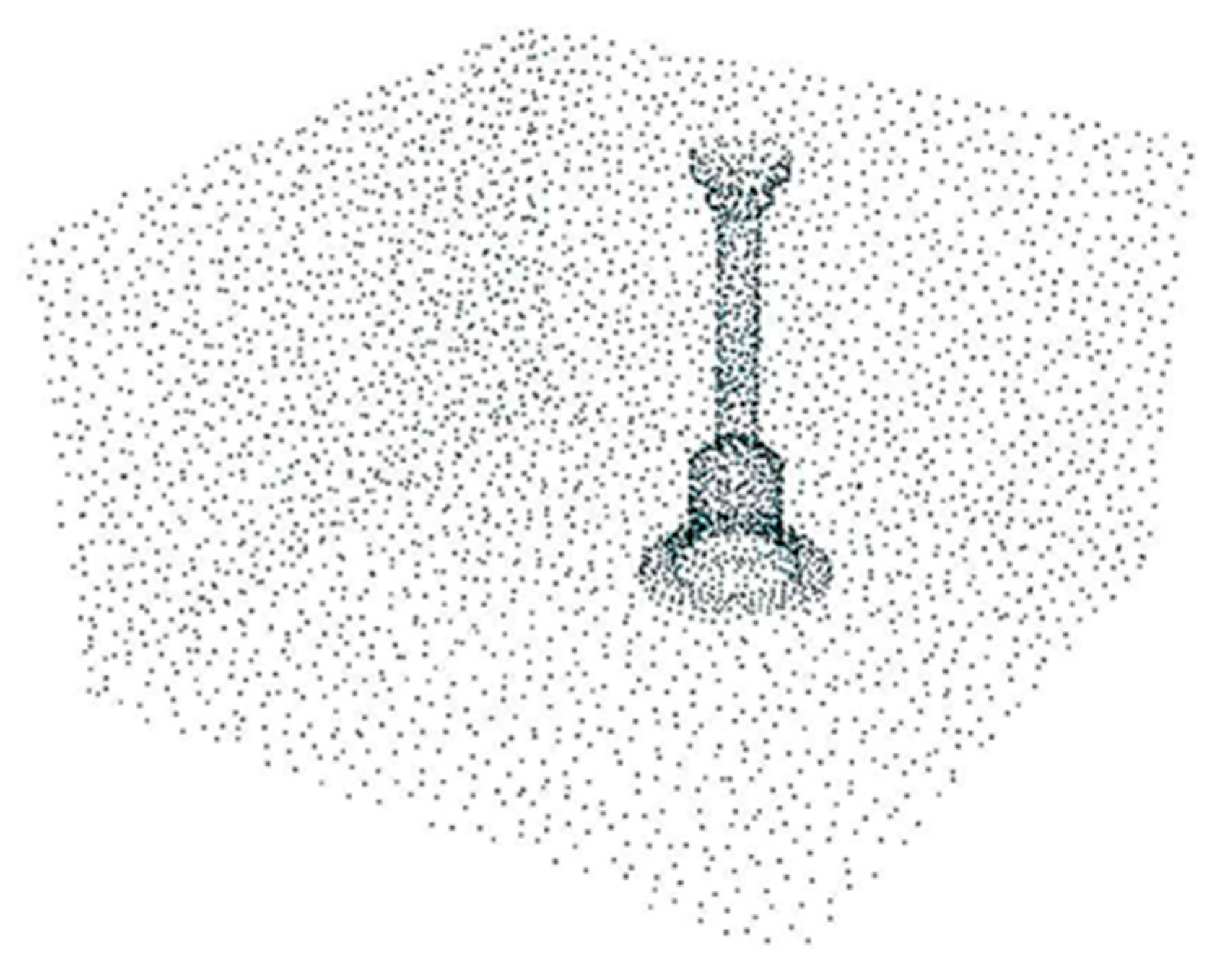
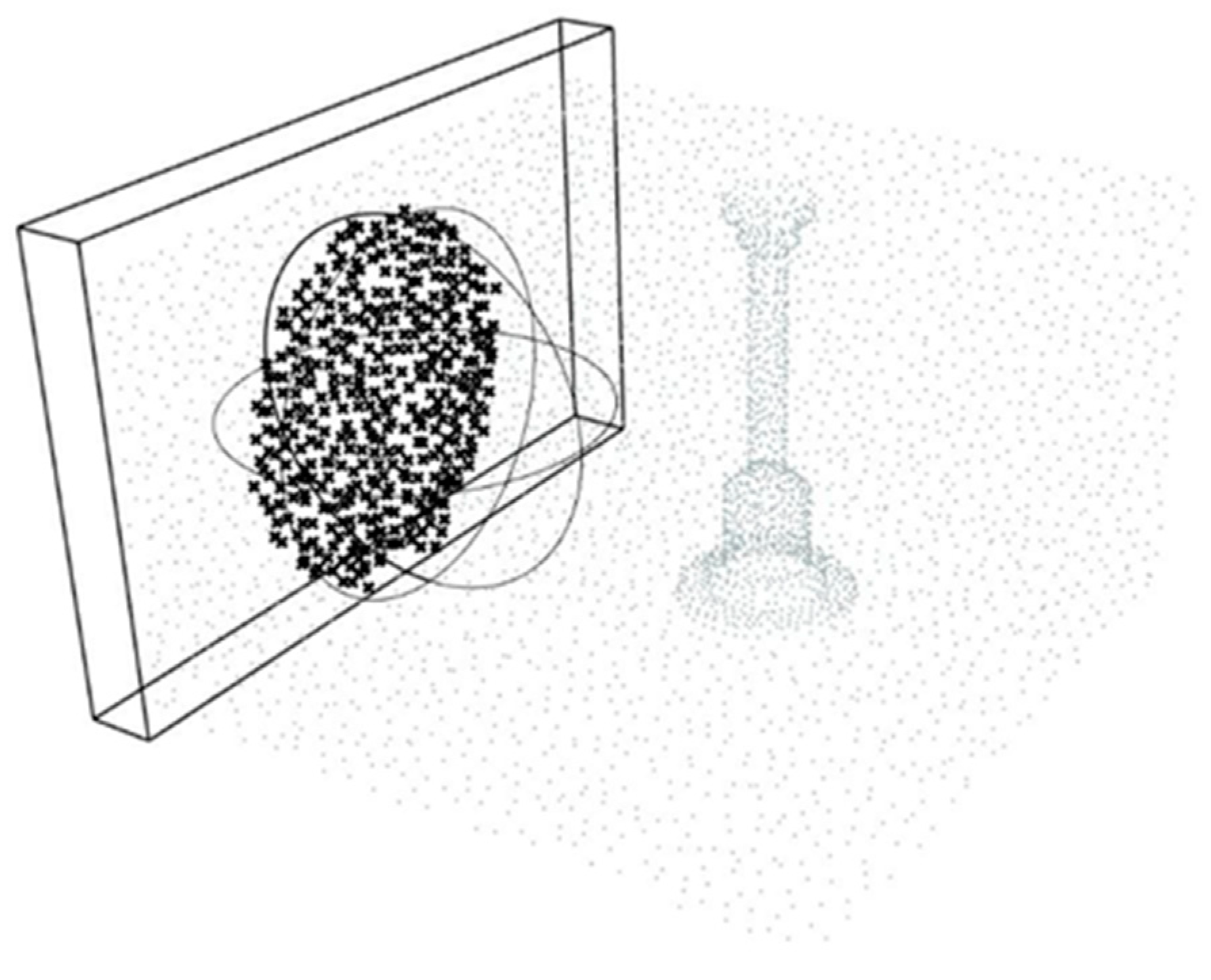
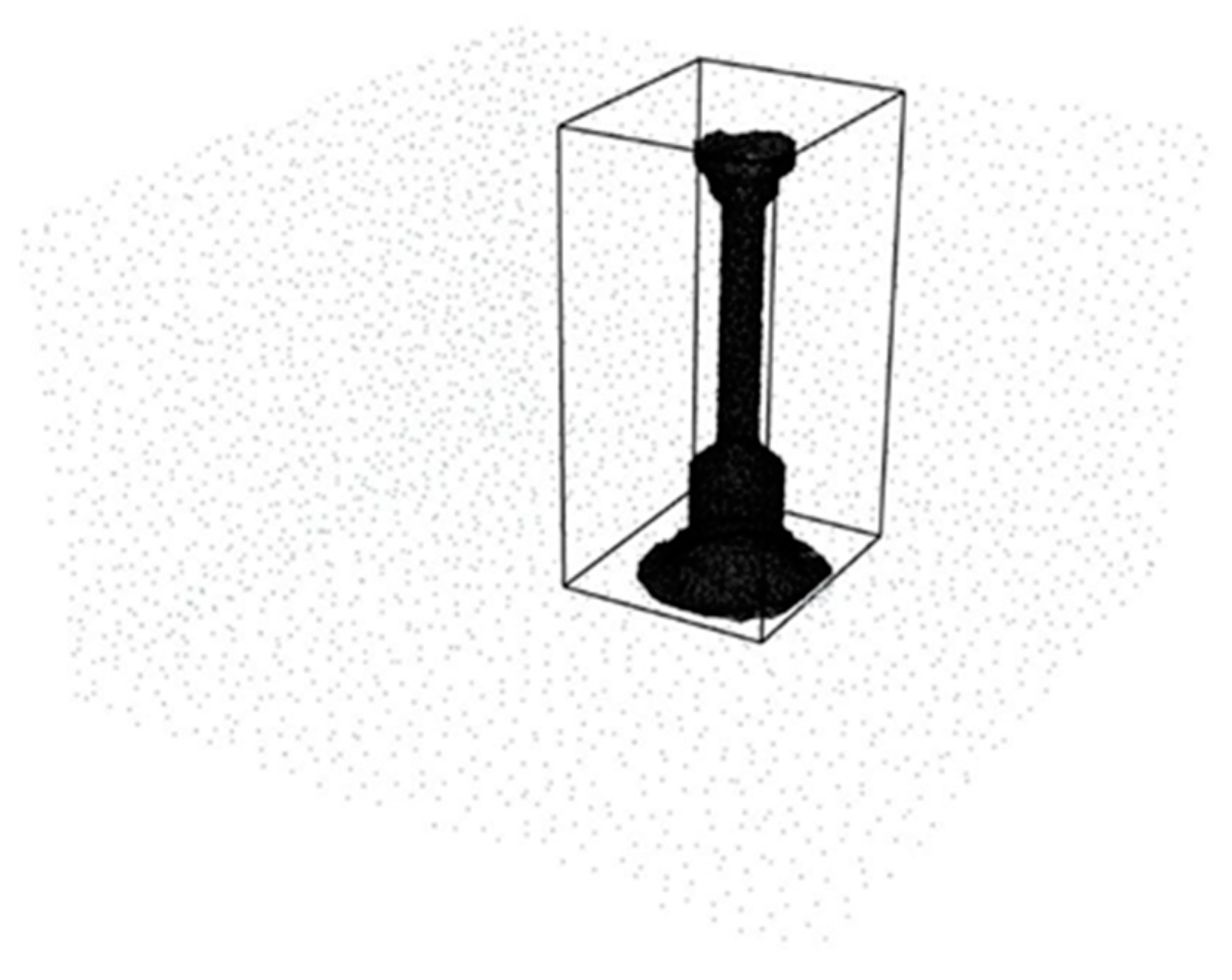
2.4. Study Model with an Artificial Point Cloud
2.5. Processing Delaunay Meshes
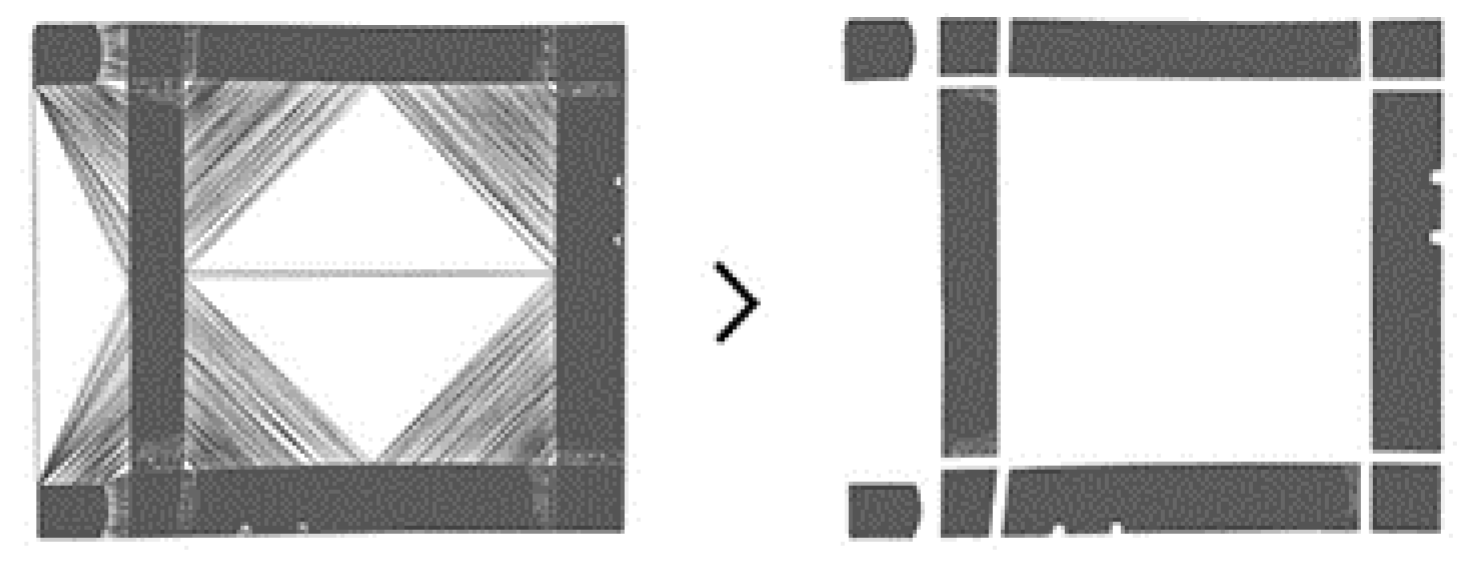
2.6. Crease Processing
2.7. Interface
2.8. Automatic Creation Textures
3. Results
3.1. Transfer to BIM (ArchiCAD)
3.2. Assigning Semantic Data to Objects
3.3. Texture Creation
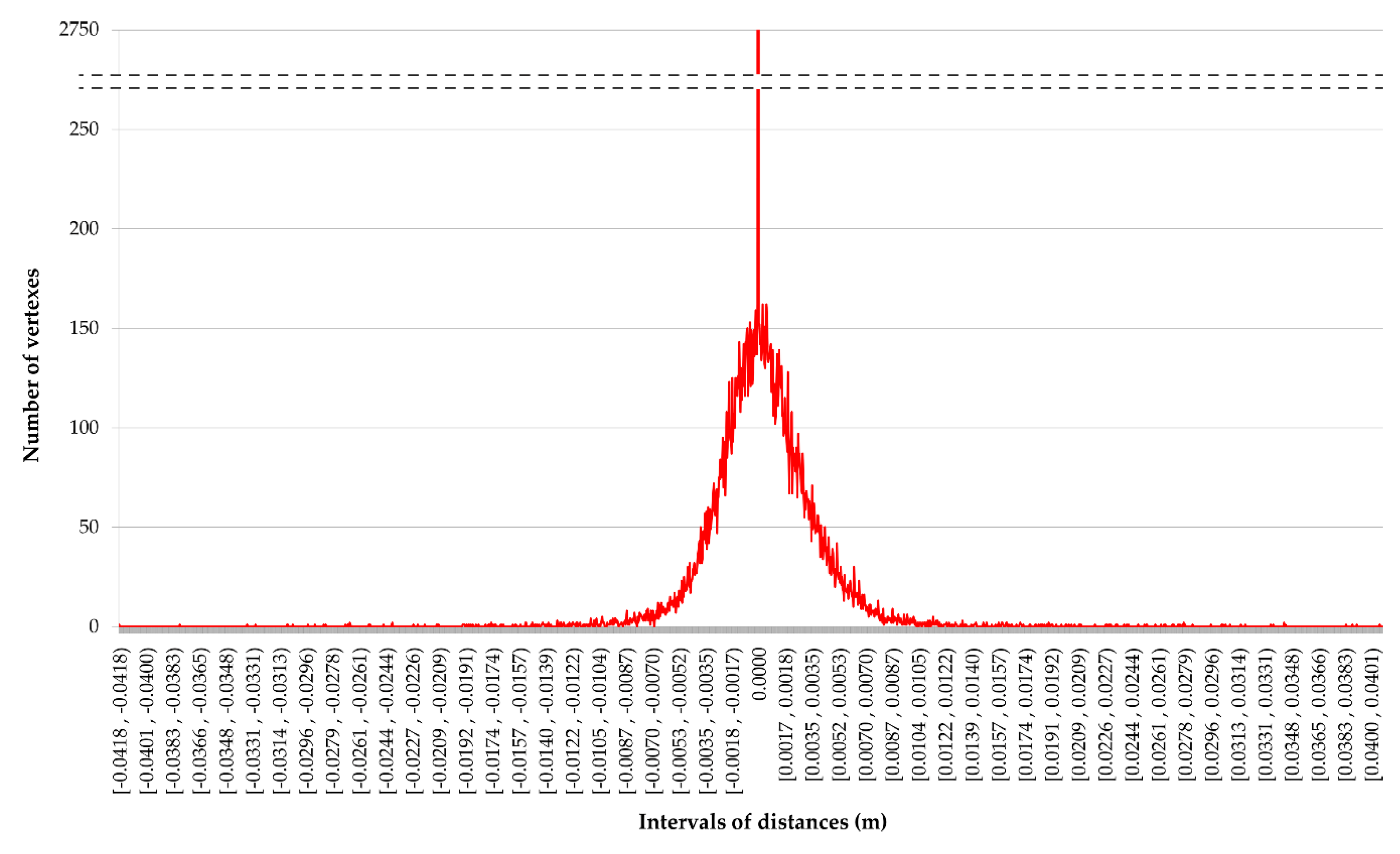
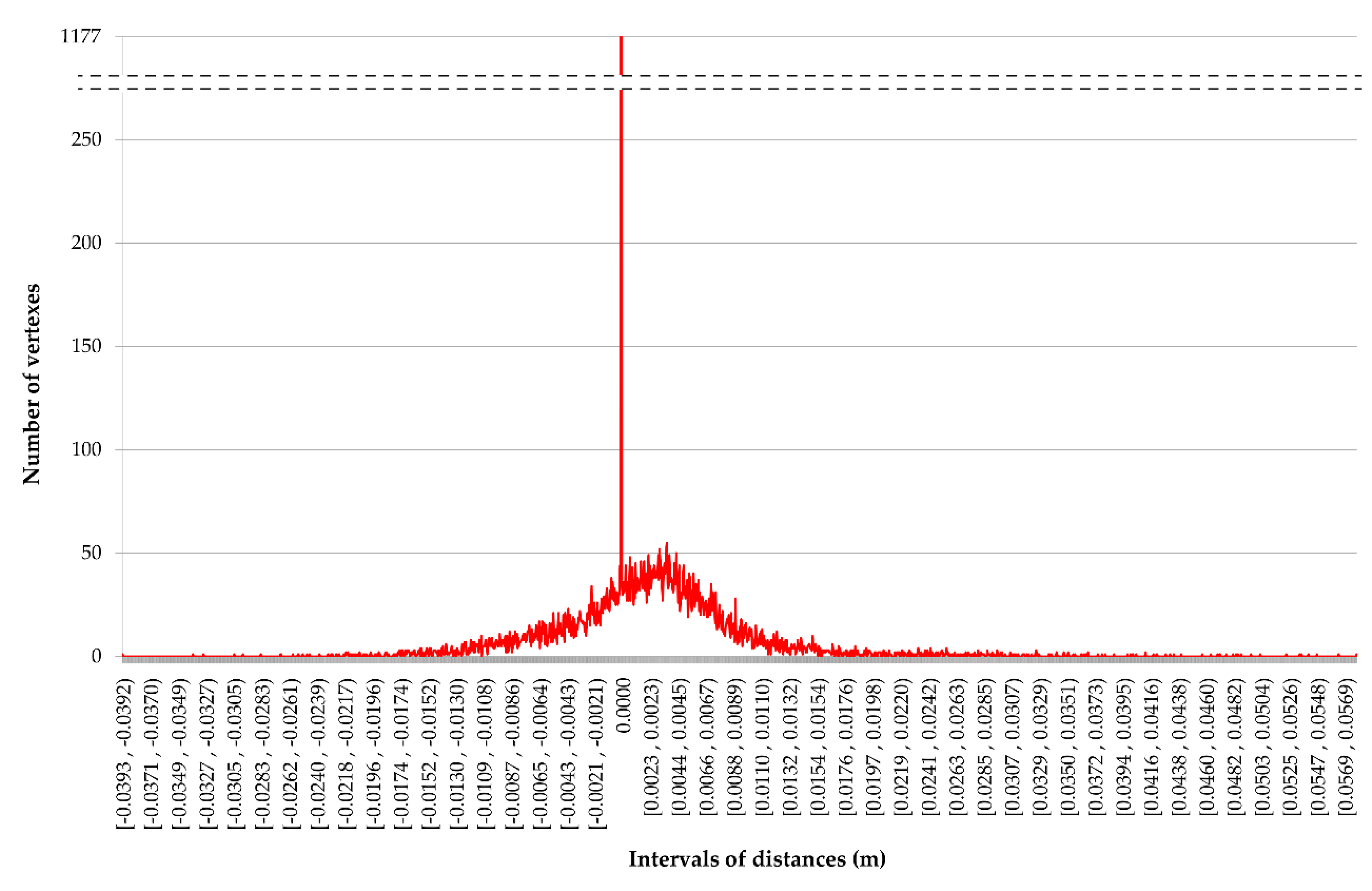
3.4. Accuracy Evaluation
4. Discussion of Results
- Surface reconstruction, which performs several calculations in order to obtain different parameters for a selected subset of the point cloud.
- The detection of colliding pairs for crease processing described in section 2.6 is a multi-object parametrisation.
- Global parameters: to determine the resolution of point clouds or the BIM objects type choice that the reconstructed mesh will be translated to.
4.1. User Recommendations
- Every time the geometry is created, it is not necessary to send it to ArchiCAD in order to save the data. The meshes are already saved in Rhinoceros, which means that the transfer to ArchiCAD can be conducted every 5-6 steps or more.
- If working with architectural models, it is highly advisable to position the point cloud in such a way that the least amount of subsampling operations is required. Moreover, it is advisable to orient the cloud to the Cartesian system in Rhinoceros.
- It is easier to control the cropping objects in planar views (top, front, side) rather than in perspective.
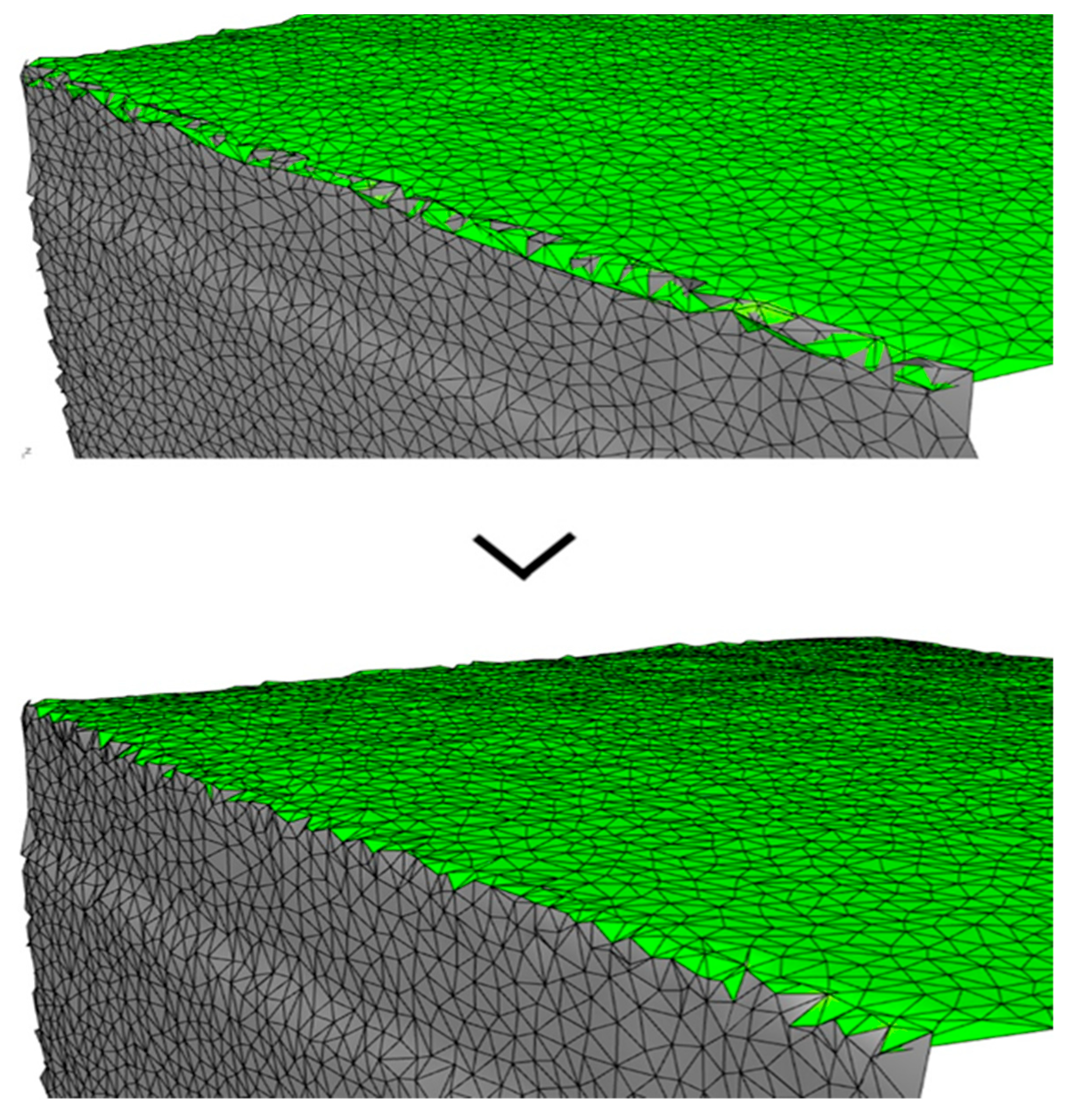
- In certain cases, as in this case study, there may be long continuous surfaces such as walls. In the case of heritage objects, the deviation from the fitted plane of those long continuous elements may be extremely high if taken as one piece. In that case, the object may be reconstructed from several pieces that can be determined by the user. This will ensure a better and faster workflow, especially concerning the crease processing algorithm, resulting in seamless and smoother component joints.
4.2. Different Methods of Source Reconstruction
4.2.1. Delaunay Meshing
4.2.2. Ball-Pivot
4.2.3. Marching Cubes
4.2.4. Voxelisation
4.3. Meshing Accuracy
5. Conclusions
Author Contributions
Funding
Acknowledgements
Conflicts of Interest
References
- Pavlovskis, M.; Migilinskas, D.; Antucheviciene, J. Implementing BIM for industrial and heritage building conversion. In Proceedings of the 17th International Colloquium Sustainable Decisions in Built Environment, Vilnius, Lithuania, 15 May 2019. [Google Scholar]
- Biagini, C.; Capone, P.; Donato, V.; Facchini, N. Towards the BIM implementation for historical building restoration sites. Autom. Constr 2016, 71, 74–86. [Google Scholar] [CrossRef]
- Bienvenido-Huertas, D.; Nieto-Julián, J.E.; Moyano, J.J.; Macías-Bernal, J.M.; Castro, J. Implementing Artificial Intelligence in H-BIM Using the J48 Algorithm to Manage Historic Buildings. Int. J. Archit. Herit 2019, 1–13. [Google Scholar] [CrossRef]
- Osello, A.; Lucibello, G.; Morgagni, F. HBIM and virtual tools: A new chance to preserve architectural heritage. Buildings 2018, 8, 12. [Google Scholar] [CrossRef] [Green Version]
- Nieto-Julián, J.E.; Antón, D.; Moyano, J.J. Implementation and Management of Structural Deformations into Historic Building Information Models. Int. J. Archit. Herit. 2019, 0, 1–14. [Google Scholar] [CrossRef]
- Bruno, S.; De Fino, M.; Fatiguso, F. Historic Building Information Modelling: performance assessment for diagnosis-aided information modelling and management. Autom. Constr. 2018, 86, 256–276. [Google Scholar] [CrossRef]
- Bacci, G.; Bertolini, F.; Bevilacqua, M.G.; Caroti, G.; Martínez-Espejo Zaragoza, I.; Martino, M.; Piemonte, A. Hbim methodologies for the architectural restoration. the case of the ex-church of san quirico all’olivo in lucca, tuscany. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2019, W11–2/W11, 121–126. [Google Scholar] [CrossRef] [Green Version]
- Antón, D.; Medjdoub, B.; Shrahily, R.; Moyano, J. Accuracy evaluation of the semi-automatic 3D modeling for historical building information models. Int. J. Archit. Herit. 2018, 12, 790–805. [Google Scholar] [CrossRef] [Green Version]
- Antón, D.; Pineda, P.; Medjdoub, B.; Iranzo, A. As-built 3D heritage city modelling to support numerical structural analysis: Application to the assessment of an archaeological remain. Remote Sens. 2019, 11, 1276. [Google Scholar] [CrossRef] [Green Version]
- Oreni, D.; Brumana, R.; Della Torre, S.; Banfi, F.; Barazzetti, L.; Previtali, M. Survey turned into HBIM: the restoration and the work involved concerning the Basilica di Collemaggio after the earthquake (L’Aquila). Int. Arch. Photogramm Remote Sens. Spat. Inf. Sci. 2014, 2–5; 267–273. [Google Scholar] [CrossRef] [Green Version]
- Barazzetti, L. Parametric as-built model generation of complex shapes from point clouds. Adv. Eng. Informatics 2016, 30, 298–311. [Google Scholar] [CrossRef]
- Dore, C.; Murphy, M.; McCarthy, S.; Brechin, F.; Casidy, C.; Dirix, E. Structural simulations and conservation analysis-historic building information model (HBIM). Int. Arch. Photogramm Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 351–357. [Google Scholar] [CrossRef] [Green Version]
- Gigliarelli, E.; Calcerano, F.; Cessari, L. Heritage Bim, Numerical Simulation and Decision Support Systems: An Integrated Approach for Historical Buildings Retrofit. Energy Procedia 2017, 133, 135–144. [Google Scholar] [CrossRef]
- Jordan-Palomar, I.; Tzortzopoulos, P.; García-Valldecabres, J.; Pellicer, E. Protocol to manage heritage-building interventions using heritage building information modelling (HBIM). Sustainability 2018, 10, 908. [Google Scholar] [CrossRef] [Green Version]
- Stanga, C.; Spinelli, C.; Brumana, R.; Oreni, D.; Valente, R.; Banfi, F. A N-D virtual notebook about the basilica of s. Ambrogio in milan: Information modeling for the communication of historical phases subtraction process. Int. Arch. Photogramm Remote Sens. Spat. Inf. Sci. 2017, XLII-W5, 653–660. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, H.M.; Yakar, M.; Gulec, S.A.; Dulgerler, O.N. Importance of digital close-range photogrammetry in documentation of cultural heritage. J. Cult. Herit. 2007, 8, 428–433. [Google Scholar] [CrossRef]
- Bagnolo, V.; Argiolas, R.; Cuccu, A. HBIM for archaeological sites: from SFM based survey to algorithmic modeling. Int. Arch. Photogramm Remote Sens. Spat. Inf. Sci. 2019, XLII-2, 57–63. [Google Scholar] [CrossRef] [Green Version]
- Banfi, F. The integration of a scan-To-hbim process in bim application: The development of an add-in to guide users in autodesk revit. Int. Arch. Photogramm Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W11, 141–148. [Google Scholar] [CrossRef] [Green Version]
- Bassier, M.; Hadjidemetriou, G.; Vergauwen, M. Implementation of Scan-to-BIM and FEM for the Documentation and Analysis of Heritage Timber Roof Structures. Digit. Herit. Prog. Cult. Herit. Doc. Preserv. Prot. 2016, 1, 79–90. [Google Scholar]
- Historic England. BIM for Heritage: Developing a Historic Building Information Model. Available online: https://historicengland.org.uk/images-books/publications/bim-for-heritage/ (accessed on 17 January 2020).
- Fernández, A.A.; Soria, E.; Agustín, L.; Alberto, J.; Adrián, A.; Ereño, B.; Salvador, E.; Jordán, I.; Nieto, E.; Moyano, J.J.; et al. BIM Aplicado al Patrimonio Cultural Coordinador del Proyecto Coordinadores de los Grupos de Trabajo. Available online: https://www.researchgate.net/profile/Juan_Nieto10/publication/330183791_BIM_aplicado_al_Patrimonio_Cultural_Documento_14_Guia_de_usuarios_BIM_Building_SMART_Spain_Chapter/links/5c328768299bf12be3b3ed0d/BIM-aplicado-al-Patrimonio-Cultural-Documento-14-Guia (accessed on 7 January 2020).
- Nemetschek Allplan—CAD BIM Software—ALLPLAN Systems España S. Available online: https://www.allplan.com/es/ (accessed on 11 December 2019).
- Graphisoft ArchiCAD 2019. Available online: https://www.graphisoft.com/archicad/ (accessed on 6 August 2019).
- Martens, B. ArchiCAD: Best Practice: the Virtual Building TM Revealed. Available online: https://www.semanticscholar.org/topic/Geometric-Description-Language/2774212 (accessed on 4 March 2020).
- ARCHICAD Geometric Description Language. Available online: https://www.semanticscholar.org/topic/Geometric-Description-Language/2774212 (accessed on 4 March 2020).
- Merchán, P.; Salamanca, S.; Merchán, M.J.; Pérez, E.; Moreno, D. PASADO, PRESENTE Y FUTURO DE LOS HBIM (HERITAGE/HISTORIC BUILDING INFORMATION MODELS). In Proceedings of the XXXIX Jornadas de Automática, Badajoz, Spain, 5–7 September 2018. [Google Scholar]
- Quattrini, R.; Malinverni, E.S.; Clini, P.; Nespeca, R.; Orlietti, E. From tls to hbim. high quality semantically-aware 3d modeling of complex architecture. Int. Arch. Photogramm Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 367–374. [Google Scholar] [CrossRef] [Green Version]
- Murphy, M.; Pavia, S.; Mc Govern, E. Correlation of laser-scan surveys of irish classical architecture with historic documentation from architectural pattern books. In Architecture and Mathematics from Antiquity to the Future: Volume II: The 1500s to the Future; Springer: Basel, Switzerland, 2015. [Google Scholar]
- Bassier, M.; Vergauwen, M.; Van Genechten, B. Automated classification of heritage buildings for as-built bim using machine learning techniques. Isprs. Ann. Photogramm. Remote Sens. Spat. Inf. Sci 2017, IV-2/W2, 25–30. [Google Scholar] [CrossRef] [Green Version]
- Acierno, M.; Cursi, S.; Simeone, D.; Fiorani, D. Architectural heritage knowledge modelling: An ontology-based framework for conservation process. J. Cult. Herit. 2017, 24, 124–133. [Google Scholar] [CrossRef]
- Baik, A. From point cloud to Jeddah Heritage BIM Nasif Historical House – case study. Digit. Appl. Archaeol. Cult. Herit. 2017, 4, 1–18. [Google Scholar] [CrossRef]
- López, F.J.; Lerones, P.M.; Llamas, J.; Gómez-Garcia-Bermejo, J.; Zalama, E. Linking HBIM graphical and semantic information through the Getty AAT: Practical application to the Castle of Torrelobatón. Iop Conf. Ser.: Mater. Sci. Eng. 2018, 364. [Google Scholar] [CrossRef]
- Garagnani, S.; Gaucci, A.; Govi, E. Archaeobim: Dallo scavo al building information modeling di una struttura sepolta. Il caso del tempio tuscanico di uni a marzabotto. Archeol. E Calc. 2016, 27, 251–270. [Google Scholar]
- Autodesk. Autodesk Revit BIM Software. Available online: https://www.autodesk.com/products/revit/overview (accessed on 13 February 2020).
- Thomson, C.; Boehm, J. Automatic geometry generation from point clouds for BIM. Remote Sens. 2015, 7, 11753–11775. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Cho, Y.K.; Kim, C. Automatic BIM component extraction from point clouds of existing buildings for sustainability applications. Autom. Constr. 2015, 56, 1–13. [Google Scholar] [CrossRef]
- Maalek, R.; Lichti, D.D.; Ruwanpura, J.Y. Automatic recognition of common structural elements from point clouds for automated progress monitoring and dimensional quality control in reinforced concrete construction. Remote Sens. 2019, 11, 1102. [Google Scholar] [CrossRef] [Green Version]
- Díaz-Vilariño, L.; Conde, B.; Lagüela, S.; Lorenzo, H. Automatic detection and segmentation of columns in as-built buildings from point clouds. Remote Sens. 2015, 7, 15651–15667. [Google Scholar] [CrossRef] [Green Version]
- Tang, P.; Huber, D.; Akinci, B.; Lipman, R.; Lytle, A. Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Autom. Constr. 2010, 19, 829–843. [Google Scholar] [CrossRef]
- Sztwiertnia, D.; Ochałek, A.; Tama, A.; Lewińska, P. HBIM (heritage Building Information Modell) of the Wang Stave Church in Karpacz – Case Study. Int. J. Archit. Herit. 2019, 1–15. [Google Scholar] [CrossRef]
- Quattrini, R.; Pierdicca, R.; Morbidoni, C. Knowledge-based data enrichment for HBIM: Exploring high-quality models using the semantic-web. J. Cult. Herit. 2017, 28, 129–139. [Google Scholar] [CrossRef]
- Khaja, M.; Seo, J.D.; McArthur, J.J. Optimizing BIM Metadata Manipulation Using Parametric Tools. Procedia Engineering 2016, 145, 259–266. [Google Scholar] [CrossRef]
- Autodesk Dynamo BIM. Available online: https://dynamobim.org/ (accessed on 4 March 2020).
- Rahmani Asl, M.; Zarrinmehr, S.; Bergin, M.; Yan, W. BPOpt: A framework for BIM-based performance optimization. Energy Build. 2015, 108, 401–412. [Google Scholar] [CrossRef] [Green Version]
- Zienkiewicz O., C.; Taylor, R.L. The Finite Element Method: Solid mechanics; Butterworth-Heinemann: Oxford, UK, 2000. [Google Scholar]
- Barazzetti, L.; Banfi, F.; Brumana, R.; Gusmeroli, G.; Previtali, M.; Schiantarelli, G. Cloud-to-BIM-to-FEM: Structural simulation with accurate historic BIM from laser scans. Simul. Model. Pract. Theory 2015, 57, 71–87. [Google Scholar] [CrossRef]
- Barazzetti, L.; Banfi, F.; Brumana, R. Historic BIM in the Cloud. In Proceedings of the the Digital Heritage. Progress in Cultural Heritage: Documentation, Preservation, and Protection, Nicosia, Cyprus, 29 October 2016; pp. 104–115. [Google Scholar]
- Yang, X.; Lu, Y.-C.; Murtiyoso, A.; Koehl, M.; Grussenmeyer, P. HBIM Modeling from the Surface Mesh and Its Extended Capability of Knowledge Representation. Isprs Int. J. Geo-Inf. 2019, 8, 301. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.C.; Shih, T.Y.; Yen, Y.N. Research on historic bim of built heritage in taiwan – a case study of huangxi academy. Isprs—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 615–622. [Google Scholar] [CrossRef] [Green Version]
- Battini, C.; Vecchiattini, R. Data parametric representation for monitoring of cultural heritage. Appl. Geomat. 2018, 10, 191–204. [Google Scholar] [CrossRef]
- Tommasi, C.; Achille, C.; Fassi, F. From point cloud to bim: a modelling challenge in the cultural heritage field. Isprs—Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2016, XLI-B5, 429–436. [Google Scholar] [CrossRef]
- Pocobelli, D.P.; Boehm, J.; Bryan, P.; Still, J.; Grau-Bové, J. Building information models for monitoring and simulation data in heritage buildings. Int. Arch. Photogramm, Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 909–916. [Google Scholar] [CrossRef] [Green Version]
- Pang, X.; Song, Z.; Lau, R.W.H. An effective quad-dominant meshing method for unorganized point clouds. Graph. Models 2014, 76, 86–102. [Google Scholar] [CrossRef]
- Cazals, F.; Giesen, J. Delaunay triangulation based surface reconstruction. In Effective Computational Geometry for Curves and Surfaces 2006, 231–276.
- Ladicky, L.; Saurer, O.; Jeong, S.; Maninchedda, F.; Pollefeys, M. From Point Clouds to Mesh Using Regression. In Proceedings of the IEEE International Conference on Computer Vision; Venice, Italy, 22–29 October 2017, Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; Volume 2017, pp. 3913–3922. [Google Scholar]
- Amenta, N.; Bern, M.; Kamvysselis, M. A New Voronoi-Based Surface Reconstruction Algorithm. In Proceedings of the the 25th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1998, Orlando, FL, USA, 19 July–24 1998; Association for Computing Machinery: New York, NY, USA, 1998; pp. 415–422. [Google Scholar]
- Brumana, R.; Oreni, D.; Raimondi, A.; Georgopoulos, A.; Bregianni, A. From survey to HBIM for documentation, dissemination and management of built heritage: The case study of St. Maria in Scaria d’Intelvi. In Proceedings of the 2013 Digital Heritage International Congress (DigitalHeritage), Marseille, France, 28 October–1 November 2013; Volume 1, pp. 497–504. [Google Scholar]
- Wang, W.; Su, T.; Liu, H.; Li, X.; Jia, Z.; Zhou, L.; Song, Z.; Ding, M. Surface reconstruction from unoriented point clouds by a new triangle selection strategy. Comput. Graph. (Pergamon) 2019, 84, 144–159. [Google Scholar] [CrossRef]
- Zhong, S.; Zhong, Z.; Hua, J. Surface reconstruction by parallel and unified particle-based resampling from point clouds. Comput. Aided Geom. Des. 2019, 71, 43–62. [Google Scholar] [CrossRef] [Green Version]
- Mineo, C.; Pierce, S.G.; Summan, R. Novel algorithms for 3D surface point cloud boundary detection and edge reconstruction. J. Comput. Des. Eng. 2019, 6, 81–91. [Google Scholar] [CrossRef]
- Li, E.; Che, W.; Zhang, X.; Zhang, Y.K.; Xu, B. Direct quad-dominant meshing of point cloud via global parameterization. In Proceedings of the Computers and Graphics (Pergamon), Vancouver, BC, Canada, 5–7 August 2011; Volume 35, pp. 452–460. [Google Scholar]
- Robert McNeel & Associates Rhinoceros. Available online: https://www.rhino3d.com/ (accessed on 27 March 2020).
- Robert McNeel & Associates Grasshopper. Available online: https://www.grasshopper3d.com/ (accessed on 4 March 2020).
- Daniel Girardeau-Montaut, D. CloudCompare: 3D Point Cloud and Mesh Processing Software. Open Source Project 2016. Available online: https://www.danielgm.net/index.php (accessed on 9 May 2019).
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. MeshLab: an Open-Source Mesh Processing Tool. In Proceedings of the In Eurographics Italian Chapter Conference, Melbourne, Australia, 7–10 December 2008; Scarano, V., De Chiara, R., Erra, U., Eds.; The Eurographics Association: Salerno, Italy, 2008. [Google Scholar]
- Systems, 3D Geomagic Studio. Available online: http://www.3dcadportal.com/geomagic-studio.html (accessed on 4 March 2020).
- Cañal, V. La Casa de Pilatos. In Proceedings of the Architecture et vie sociale: l’organisation intérieure des grandes demeures à la fin du Moyen Age et à la Renaissance: Actes du colloque tenu à Tours, Paris, France, 6–10 June 1988. [Google Scholar]
- M. Santana Quintero Información al Servicio del Mantenimiento Preventivo del Patrimonio Arquitectonico: Conceptos y Práctica. Available online: https://limo.libis.be/primo-explore/fulldisplay?docid=LIRIAS1773968&context=L&vid=Lirias&search_scope=Lirias&tab=default_tab&lang=en_US&fromSitemap=1 (accessed on 23 January 2020).
- Altuntas, C. Integration of point clouds originated from laser scanner and photogrammetric images for visualization of complex details of historical buildings. Int. Arch. Photogramm Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 431–435. [Google Scholar] [CrossRef] [Green Version]
- Geosystems, L. Leica Cyclone REGISTER 360-3D Laser Scanning Point Cloud Registration Software; Leica Geosystems AG: Heerbrugg, Switzerland, 2018. [Google Scholar]
- Zwierzycki, M.; Evers, H.L.; Tamke, M. Parametric Architectural Design with Point-clouds Volvox. In Proceedings of the In Proceedings of the 34th eCAADe Conference, Oulu, Finland, 22–26 August 2016. [Google Scholar]
- Guttman, A. R-trees: A dynamic index structure for spatial searching. In Proceedings of the ACM SIGMOD Record, Boston, MA, USA, 18–21 June 1984; Volume 14, pp. 47–57. [Google Scholar]
- Human UI/Food4Rhino. Available online: https://www.food4rhino.com/app/human-ui (accessed on 24 January 2020).
- Pavlo Menshy (12) Heightmap in ARCHICAD/LinkedIn . Available online: https://www.linkedin.com/pulse/heightmap-archicad-pavlo-menshykh/ (accessed on 24 January 2020).
- Bernardini, F.; Mittleman, J.; Rushmeier, H.; Silva, C.; Taubin, G. The ball-pivoting algorithm for surface reconstruction. IEEE Trans. Vis. Comput. Graph. 1999, 5, 349–359. [Google Scholar] [CrossRef]
- Lorensen, W.E.; Cline, H.E. Marching cubes: A high resolution 3D surface construction algorithm. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1987, Anaheim, CA, USA, 27–31 July 1987; pp. 163–169. [Google Scholar]
- López, F.; Lerones, P.; Llamas, J.; Gómez-García-Bermejo, J.; Zalama, E. A Review of Heritage Building Information Modeling (H-BIM). Multimodal Technol. Interact. 2018, 2, 21. [Google Scholar] [CrossRef] [Green Version]
- Lee, G.; Sacks, R.; Eastman, C.M. Specifying parametric building object behavior (BOB) for a building information modeling system. Autom. Constr. 2006, 15, 758–776. [Google Scholar] [CrossRef]



















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andriasyan, M.; Moyano, J.; Nieto-Julián, J.E.; Antón, D. From Point Cloud Data to Building Information Modelling: An Automatic Parametric Workflow for Heritage. Remote Sens. 2020, 12, 1094. https://doi.org/10.3390/rs12071094
Andriasyan M, Moyano J, Nieto-Julián JE, Antón D. From Point Cloud Data to Building Information Modelling: An Automatic Parametric Workflow for Heritage. Remote Sensing. 2020; 12(7):1094. https://doi.org/10.3390/rs12071094
Chicago/Turabian StyleAndriasyan, Mesrop, Juan Moyano, Juan Enrique Nieto-Julián, and Daniel Antón. 2020. "From Point Cloud Data to Building Information Modelling: An Automatic Parametric Workflow for Heritage" Remote Sensing 12, no. 7: 1094. https://doi.org/10.3390/rs12071094
APA StyleAndriasyan, M., Moyano, J., Nieto-Julián, J. E., & Antón, D. (2020). From Point Cloud Data to Building Information Modelling: An Automatic Parametric Workflow for Heritage. Remote Sensing, 12(7), 1094. https://doi.org/10.3390/rs12071094