Multi-Scale Fused SAR Image Registration Based on Deep Forest




Abstract
:1. Introduction
2. The Proposed Method
2.1. Deep Forest
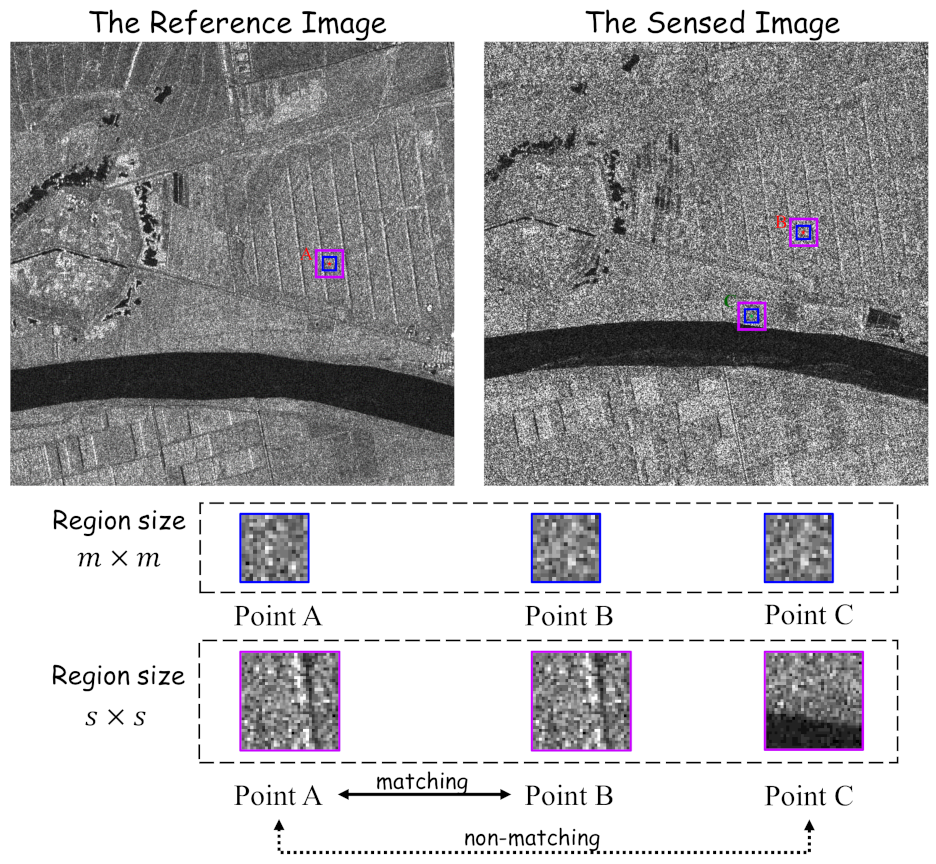
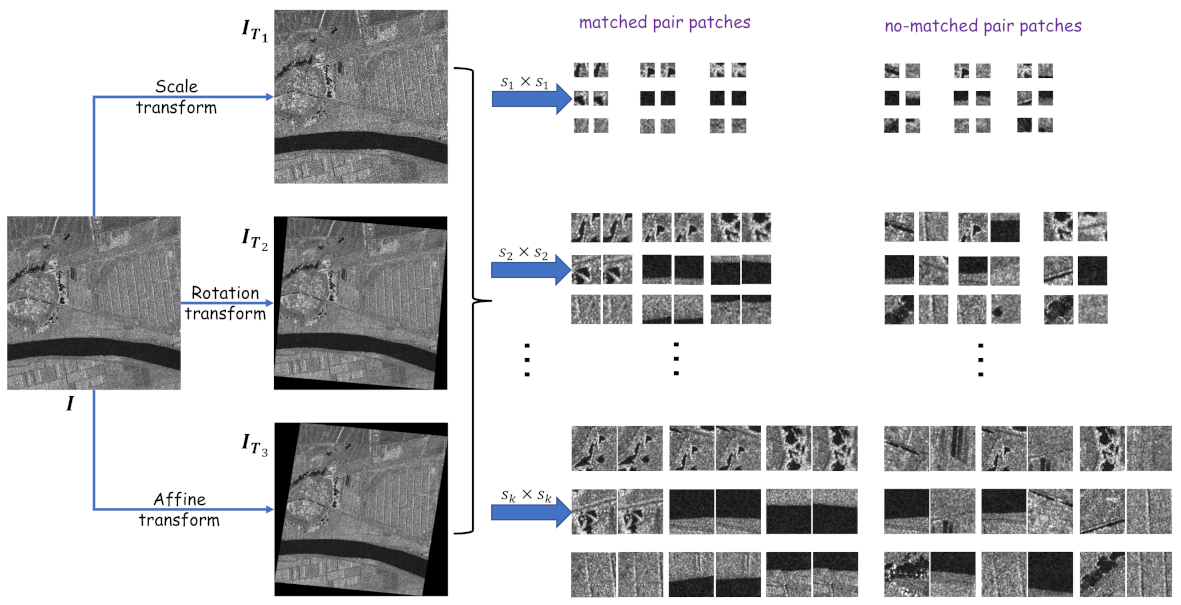
2.2. Constructing Multi-Scale Training Sets
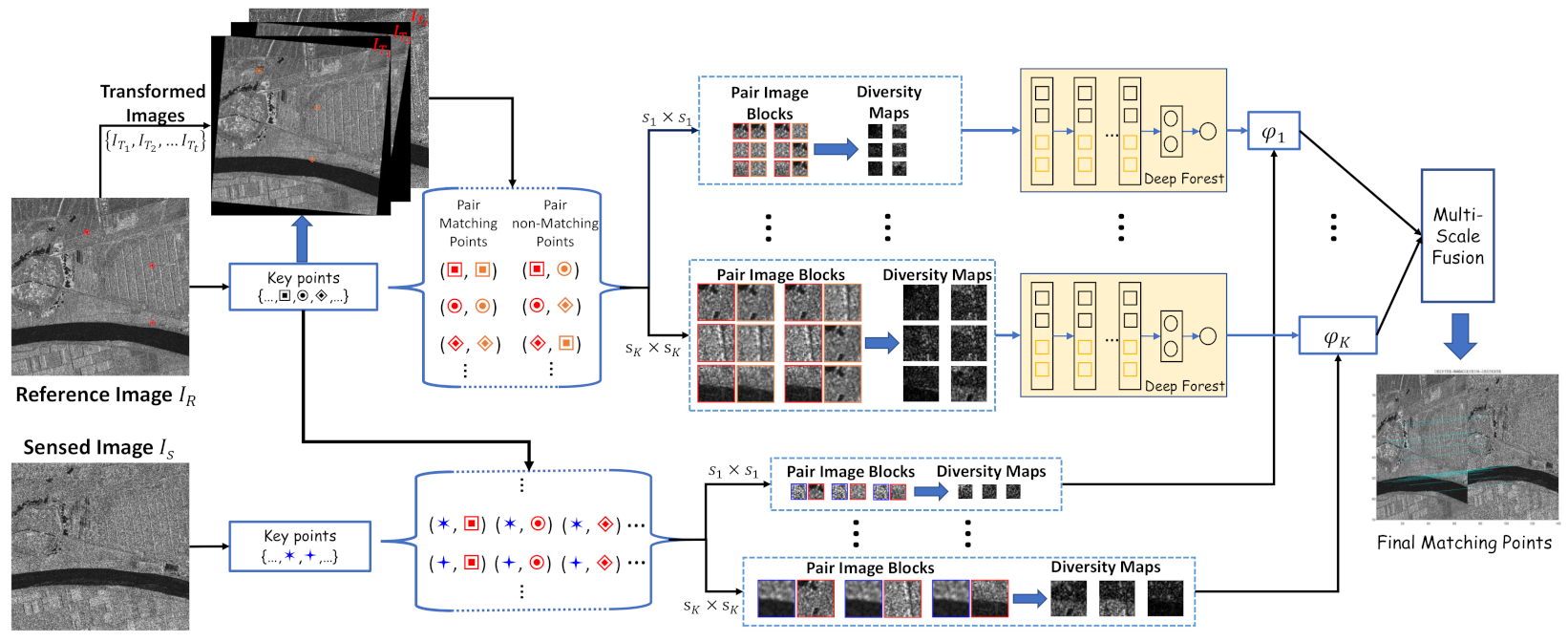
2.3. Training Matching Model
| Algorithm 1 The Procedure of Traing Matching Models. |
| Input: The constructed multi-scale training sets: where . belongs to the positive category and belongs to the negative category, where and . Initial predictive vector for each sample is the null set ∅, where . Output: K training models corresponding to multiple scales: .
|
2.4. Multi-Scale Fusion
3. Experimental Results and Analyses
3.1. Experimental Data and Settings
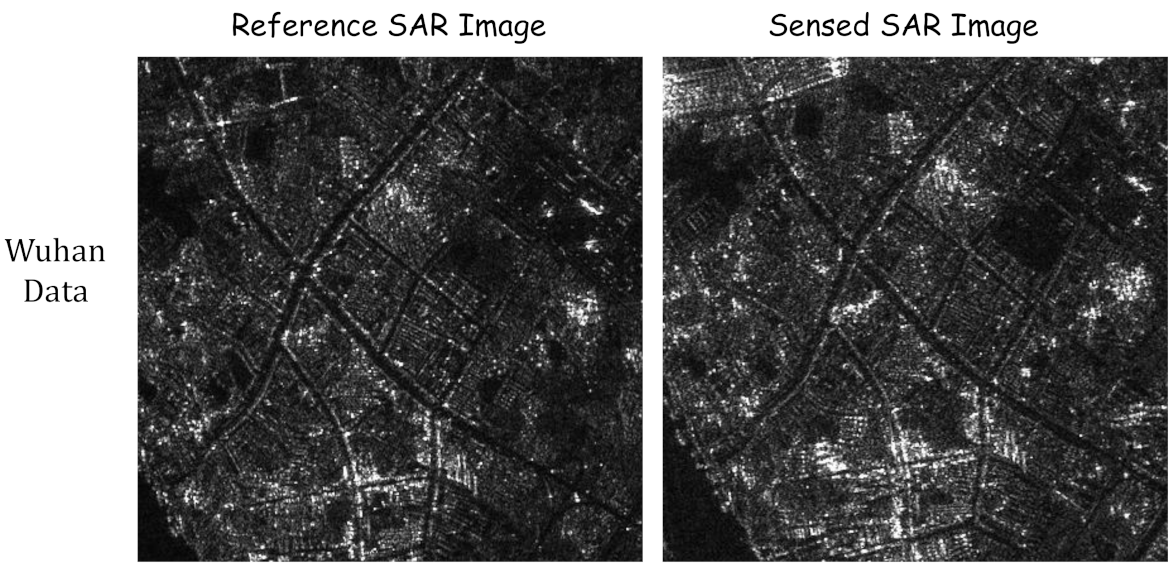
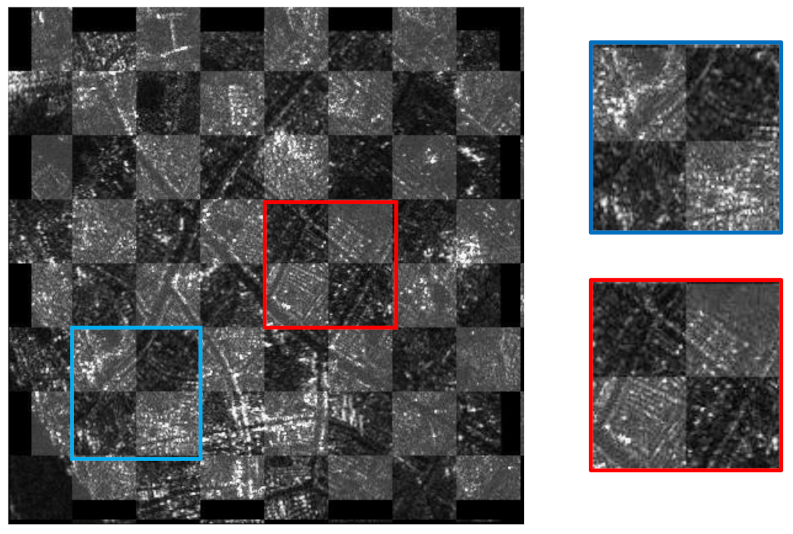
- Two SAR images of Wuhan Data were collected by the ALOS-PALSAR satellite on 4 June 2006 and 7 March 2009 in Wuhan, China, respectively, shown in Figure 5. The size of two images is and the resolution is 10 m.
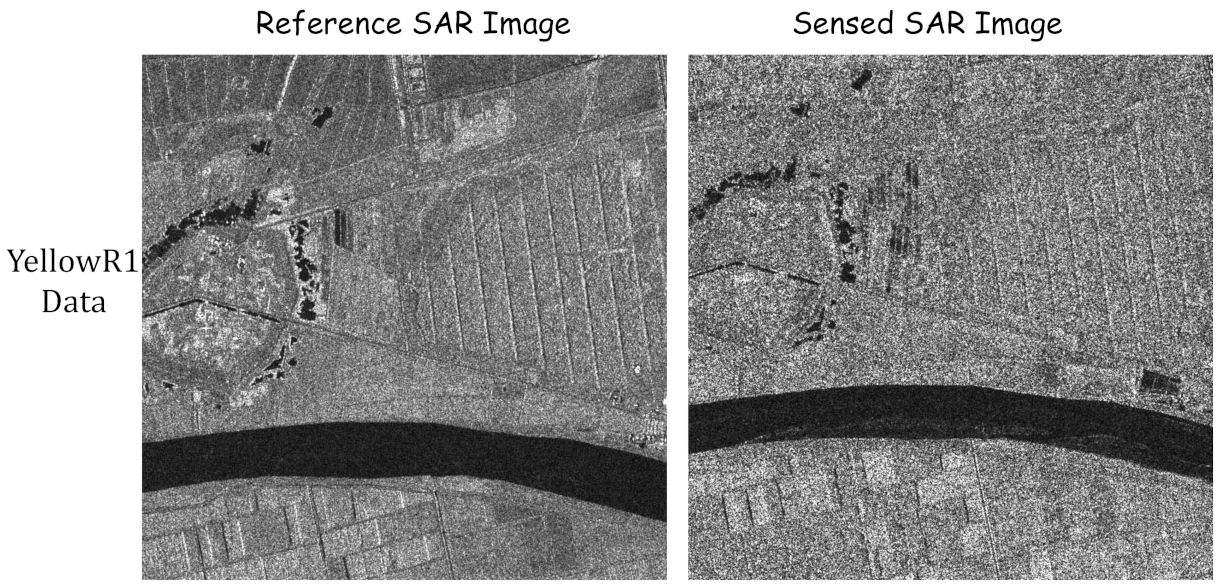
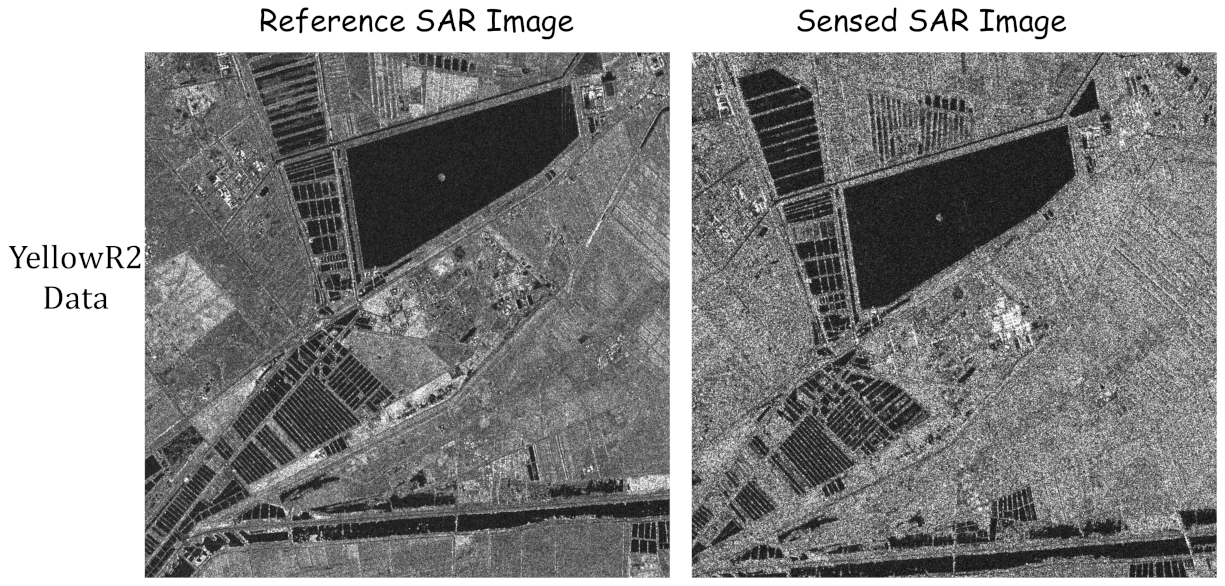
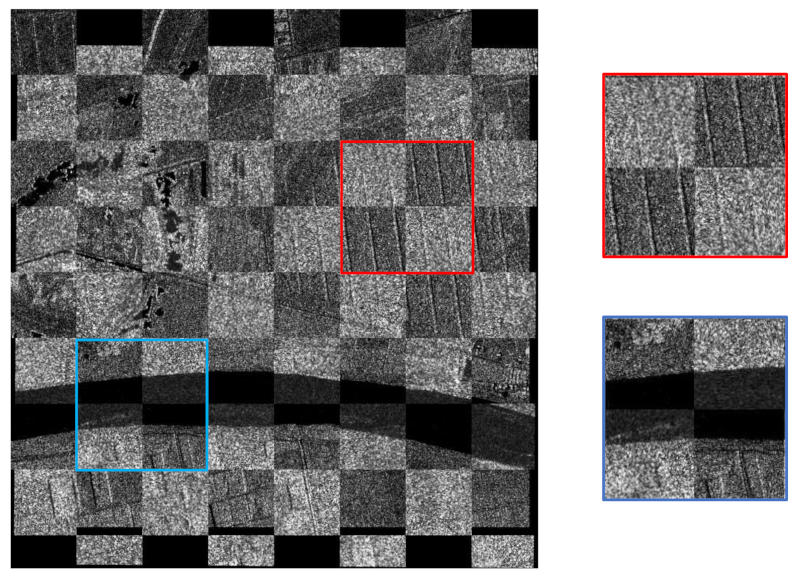
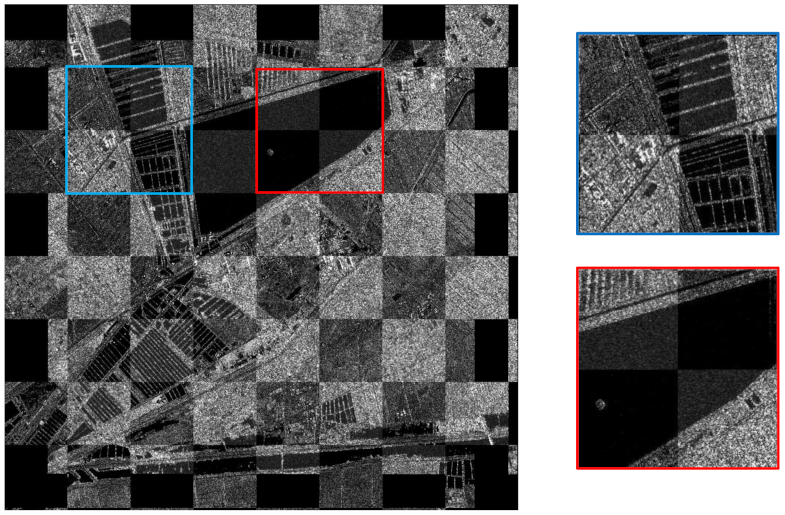
- Both YellowR1 Data and YellowR2 Data were obtained by the Radarsat-2 satellite at Yellow River of China, and their two SAR images were obtained on 18 June 2008 and 19 June 2009, respectively. In YellowR1 data, the size of two SAR images is pixels and the resolution is 8 m, shown as in Figure 6. In YellowR2 data, the size of two SAR images is pixels and the resolution is 8 meters, shown as in Figure 7. Note that YellowR1 and YellowR2 data are cropped from the SAR images of Yellow River Data with . Moreover, the sensed SAR image obtained in 2009 has more multiplicative speckle noise than the reference SAR image obtained in 2008.
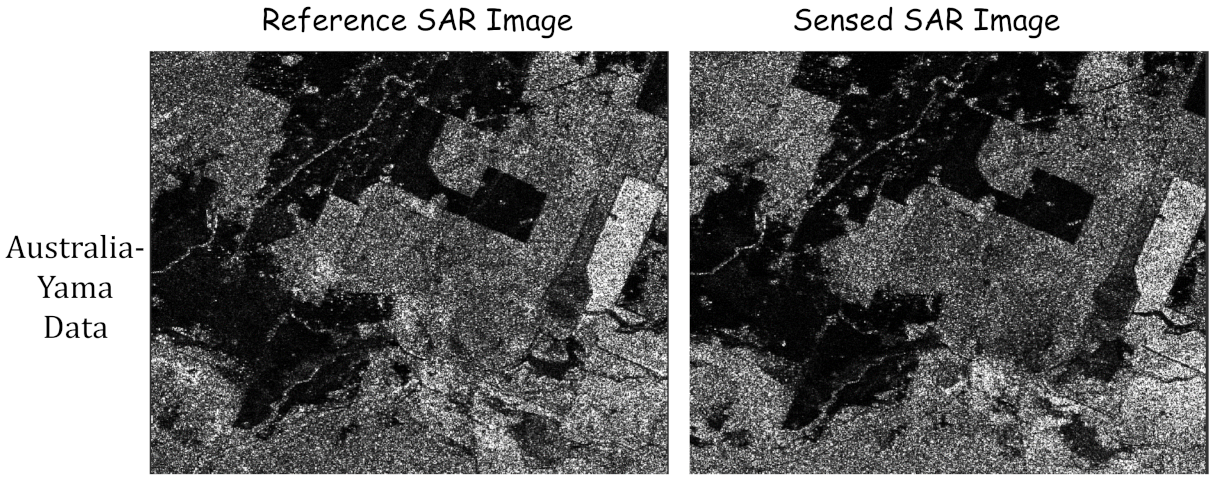
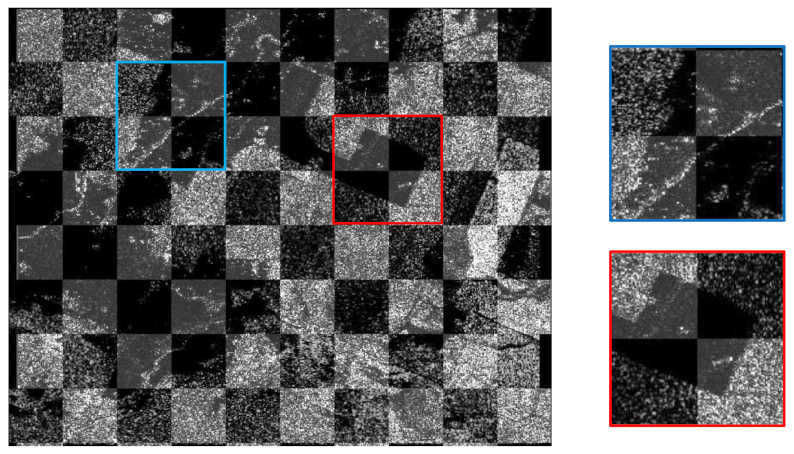
- Two SAR images of Australia-Yama Data was collected by the ALOS-PALSAR satellite in the Yamba region of Australia in 2018 and 2019, respectively. The size of two images is pixels, and they are shown in Figure 8.
- 1.
- represents the root mean square error calculated by the following formula:where . Note that means that the performance reaches sub-pixel accuracy.
- 2.
- is the number of matching pairs. For the transformation matrix, a bigger value may result in a better performance of image registration.
- 3.
- expresses the error obtained based on the Leave-One-Out strategy and the root mean square error. For each feature point in , we calculate the of feature points, and then their average value is equal to .
- 4.
- is used to detect whether the retained feature points are evenly distributed in the quadrant, and its value should be less than . First, we calculate the residuals between key points from the reference image and the transformed points in the sensed image obtained by the transformation matrix.Then, the number of residual distances is calculated in each quadrant. Finally, the cardinality distribution () of the goodness-of-fit is used to detect the distribution of feature points. In particular, this index is not suitable for the case of .
- 5.
- is the abbreviation of Bad Point Proportion. A point with a residual value lie above a certain threshold(r) is called Bad Point, and thus represents the ratio of Bad Point to the number of detected matching pairs.
- 6.
- is defined as the absolute value of the calculated correlation coefficient, which is about the statistical evaluation of the preference axis on the residual scatter plot and should be less than 0.4. As stated in [57], a more robust method of identifying the presence of a preference axis on the residual distribution is the correlation coefficient. When , the Spearman correlation coefficient is used; otherwise, the Pearson correlation coefficient is adequate.
- 7.
- is a statistical evaluation of the entire image feature point distribution, which should be less than . The calculation of is referred to [57].
- 8.
- is the linear combination of the above seven calculation indicators, the calculation formula is as follows:When , is not used, and thus the above formula is simplified asand the value should be less than 0.605.
3.2. The Comparison Performance
- SIFT detects the key points by constructing the difference-of-Gaussian scale-space, and then uses the 128-dimensional features of the key points to obtain matching pairs, and finally filters the matching pairs with the RANSAC algorithm to find the transformation parameters.
- Differently from SIFT, SAR-SIFT uses SAR-Harris space instead of difference-of-Gaussian scale-space to find keypoints.
- PSO-SIFT introduces an enhanced feature matching method that combines the position, scale and orientation of each key point based on the SIFT algorithm, greatly increasing the number of correctly corresponding point pairs.
- DNN+RANSAC constructs training sample sets using self-learning methods, and then it uses DNN networks to obtain matched image pairs.
- SNCNet+RANSAC uses the Sparse Neighborhood Consensus Network (SNCNet) to get the matching points (the network has public code), and then it uses the RANSAC algorithm to calculate the transformation matrix parameters.
3.3. The Visualization on SAR Image Registration
3.4. Analyses on Registration Performance with Different Scales
4. Discussion
4.1. Running Time
4.2. An Application on Change Detection
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bao, Z.; Xing, M.D.; Wang, T. Radar Imaging Technology; Publishing House of Electronics Industry: Beijing, China, 2005; pp. 24–30. [Google Scholar]
- Maitre, H. Processing of Synthetic Aperture Radar Images; ISTE: Orange, NJ, USA, 2013. [Google Scholar]
- Quartulli, M.; Olaizola, I.G. A review of eo image information mining. ISPRS J. Photogramm. Remote Sens. 2013, 75, 11–28. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.Q.; Dan, T.; Yang, Y. Multi-temporal remote sensing image registration using deep convolutional features. IEEE Access 2018, 6, 38544–38555. [Google Scholar] [CrossRef]
- Moser, G.; Serpico, S.B. Unsupervised change detection from multichannel sar data by markovian data fusion. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2114–2128. [Google Scholar] [CrossRef]
- Bruzzone, L.; Bovolo, F. A novel framework for the design of change-detection systems for very-high-resolution remote sensing images. Proc. IEEE 2013, 101, 609–630. [Google Scholar] [CrossRef]
- Wang, Y.; Du, L.; Dai, H. Unsupervised sar image change detection based on sift keypoints and region information. IEEE Geosci. Remote Sens. Lett. 2016, 13, 931–935. [Google Scholar] [CrossRef]
- Poulain, V.; Inglada, J.; Spigai, M.; Tourneret, J.Y.; Marthon, P. High-resolution optical and sar image fusion for building database updating. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2900–2910. [Google Scholar] [CrossRef] [Green Version]
- Byun, Y.; Choi, J.; Han, Y. An area-based image fusion scheme for the integration of sar and optical satellite imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2212–2220. [Google Scholar] [CrossRef]
- Tu, S.; Su, Y. Fast and accurate target detection based on multiscale saliency and active contour model for high-resolution sar images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5729–5744. [Google Scholar] [CrossRef]
- Dai, H.; Du, L.; Wang, Y.; Wang, Z. A modified cfar algorithm based on object proposals for ship target detection in sar images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1925–1929. [Google Scholar] [CrossRef]
- Luo, Y.; Zhao, F.; Li, N.; Zhang, H. A modified cartesian factorized back-projection algorithm for highly squint spotlight synthetic aperture radar imaging. IEEE Geosci. Remote Sens. Lett. 2019, 16, 902–906. [Google Scholar] [CrossRef]
- Huang, L.; Qiu, X.; Hu, D.; Han, B.; Ding, C. Medium-earth-orbit sar focusing using range doppler algorithm with integrated two-step azimuth perturbation. IEEE Geosci. Remote Sens. Lett. 2015, 12, 626–630. [Google Scholar] [CrossRef]
- Pu, W.; Wang, X.; Wu, J.; Huang, Y.; Yang, J. Video sar imaging based on low-rank tensor recovery. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 188–202. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Xing, M.; Sun, G.C.; Li, Z. A 2-d space-variant motion estimation and compensation method for ultrahigh-resolution airborne stepped-frequency sar with long integration time. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6390–6401. [Google Scholar] [CrossRef]
- Wei, P. Deep sar imaging and motion compensation. IEEE Trans. Image Process. 2021, 30, 2232–2247. [Google Scholar]
- Schwind, P.; Suri, S.; Reinartz, P.; Siebert, A. Applicability of the si ft operator to geometric sar image registration. Int. J. Remote Sens. 2010, 31, 1959–1980. [Google Scholar] [CrossRef]
- Wang, S.H.; You, H.J.; Fu, K. Bfsift: A novel method to find feature matches for sar image registration. IEEE Geosci. Remote Sens. Lett. 2012, 9, 649–653. [Google Scholar] [CrossRef]
- Liang, Y.; Cheng, H.; Sun, W.B.; Wang, Z.Q. Research on methods of image registration. Image Technol. 2010, 46, 15–17. [Google Scholar]
- Xu, Y.; Zhou, Y. Review of SAR image registration methods. Geospat. Inf. 2013, 5, 63–66. [Google Scholar]
- Kun, Y.; Anning, P.; Yang, Y.; Su, Z.; Sim, O.; Haolin, T. Remote sensing image registration using multiple image features. Remote Sens. 2017, 9, 581. [Google Scholar]
- Zhang, Z.X.; Li, J.Z.; Li, D.D. Research of automated image registration technique for infrared images based on optical flow field analysis. J. Infrared Millim. Waves. 2003, 22, 307–312. [Google Scholar]
- Ma, J.; Jiang, J.; Zhou, H.; Zhao, J.; Guo, X. Guided locality preserving feature matching for remote sensing image registration. IEEE Trans. Geosci. Remote Sens. 2018, 5, 1–13. [Google Scholar] [CrossRef]
- Li, D.; Zhang, Y. A fast offset estimation approach for insar image subpixel registration. IEEE Geosci. Remote Sens. Lett. 2012, 9, 267–271. [Google Scholar] [CrossRef]
- Sarvaiya, J.N.; Patnaik, S.; Bombaywala, S. Image Registration by Template Matching Using Normalized Cross-Correlation. In Proceedings of the 2009 International Conference on Advances in Computing, Control, and Telecommunication Technologies, Bangalore, India, 28–29 December 2009; pp. 819–822. [Google Scholar]
- Johnson, K.; Cole-Rhodes, A.; Zavorin, I.; Moigne, J.L. Mutual information as a similarity measure for remote sensing image registration. Proc. SPIE Int. Soc. Opt. Eng. 2001, 4383, 51–61. [Google Scholar]
- Averbuch, A.; Keller, Y. FFT based image registration. In Proceedings of the IEEE International Conference on Acoustics, Dubrovnik, Croatia, 15–18 September 2002. [Google Scholar]
- Chen, H.M.; Varshney, P.K.; Arora, M.K. Performance of mutual information similarity measure for registration of multitemporal remote sensing images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2445–2454. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, Q.; Yu, W. An improved Normalized Cross Correlation algorithm for SAR image registration. In Proceedings of the Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 147–151. [Google Scholar]
- Lowe, G. Sift—The scale invariant feature transform. Int. J. Comput. Vis. 2004, 2, 91–110. [Google Scholar] [CrossRef]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition—CVPR 2004, Washington, DC, USA, 27 June–2 July 2004. [Google Scholar]
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. Sar-sift: A sift-like algorithm for sar images. IEEE Trans. Geosci. Remote Sens. 2013, 53, 453–466. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, C.; Hiramatsu, K.; Kashino, K. Modular representation of layered neural networks. Neural Netw. 2017, 13, 62–73. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thomas, B.; Moeslund, E.G. A survey of computer vision-based human motion capture. Comput. Vis. Image Underst. 2001, 16, 472. [Google Scholar]
- Guo, Y.; Sun, Z.; Qu, R.; Jiao, L.; Zhang, X. Fuzzy superpixels based semi-supervised similarity-constrained cnn for polsar image classification. Remote Sens. 2020, 12, 1694. [Google Scholar] [CrossRef]
- Rostami, M.; Kolouri, S.; Eaton, E.; Kim, K. Deep transfer learning for few-shot sar image classification. Remote Sens. 2019, 11, 1374. [Google Scholar] [CrossRef] [Green Version]
- Krestenitis, M.; Orfanidis, G.; Ioannidis, K.; Avgerinakis, K.; Kompatsiaris, I. Oil spill identification from satellite images using deep neural networks. Remote Sens. 2019, 11, 1762. [Google Scholar] [CrossRef] [Green Version]
- Haas, J.; Rabus, B. Uncertainty Estimation for Deep Learning-Based Segmentation of Roads in Synthetic Aperture Radar Imagery. Remote Sens. 2021, 13, 1472. [Google Scholar] [CrossRef]
- Zhang, H.; Ni, W.; Yan, W.; Xiang, D.; Bian, H. Registration of multimodal remote sensing image based on deep fully convolutional neural network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3028–3042. [Google Scholar] [CrossRef]
- Zagoruyko, S.; Komodakis, N. Learning to Compare Image Patches Via Convolutional Neural Networks. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Wang, S.; Quan, D.; Liang, X.; Ning, M.; Guo, Y.; Jiao, L. A deep learning framework for remote sensing image registration. ISPRS J. Photogramm. Remote Sens. 2018, 145, 148–164. [Google Scholar] [CrossRef]
- Han, X.; Leung, T.; Jia, Y.; Sukthankar, R.; Berg, A.C. MatchNet: Unifying feature and metric learning for patch-based matching. Comput. Vis. Pattern Recognit. 2015, 3325–3337. [Google Scholar]
- Zhou, Z.H.; Feng, J. Deep Forest: Towards an Alternative to Deep Neural Networks. arXiv 2017, arXiv:1702.08835. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Dong, X.; Yu, Z.; Cao, W.; Shi, Y.; Ma, Q. A survey on ensemble learning. Front. Comput. Sci. 2020, 14, 241–258. [Google Scholar] [CrossRef]
- Zhou, Z.H. Ensemble Methods: Foundations and Algorithms; Taylor Francis: Boca Raton, FL, USA, 2012; p. 236. [Google Scholar]
- Mao, S.; Lin, W.S.; Jiao, L.; Gou, S.; Chen, J.W. End-to-end ensemble learning by exploiting the correlation between individuals and weights. IEEE Trans. Cybern. 2019, 51, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Mao, S.; Chen, J.W.; Jiao, L.; Gou, S.; Wang, R. Maximizing diversity by transformed ensemble learning. Appl. Soft Comput. 2019, 82, 105580. [Google Scholar] [CrossRef]
- Miao, X.; Heaton, J.S.; Zheng, S.; Charlet, D.A.; Liu, H. Applying tree-based ensemble algorithms to the classification of ecological zones using multi-temporal multi-source remote-sensing data. Int. J. Remote Sens. 2012, 33, 1823–1849. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Chica-Olmo, M. Random forest classification of mediterranean land cover using multi-seasonal imagery and multi-seasonal texture. Remote Sens. Environ. 2012, 121, 93–107. [Google Scholar] [CrossRef]
- Pierce, A.D.; Farris, C.A.; Taylor, A.H. Use of random forests for modeling and mapping forest canopy fuels for fire behavior analysis in Lassen Volcanic National Park, California, USA-ScienceDirect. For. Ecol. Manag. 2012, 279, 77–89. [Google Scholar] [CrossRef]
- Zou, T.; Yang, W.; Dai, D. Polarimetric SAR image classification using multi-features combination and extremely randomized clustering forests. Eurasip J. Adv. Signal Process. 2010, 2010, 1. [Google Scholar]
- Ma, W.P.; Yang, H.; Wu, Y.; Jiao, L.C.; Chen, X.B. A SAR Image Change Detection Method Based on Deep Forest. Master’s Thesis, Xidian University, Xi’an, China, 2018. [Google Scholar]
- Ranjan, A. Normalized cross correlation. Image Process. 1995, 28, 819. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus. Commun. ACM 1981, 6, 381–395. [Google Scholar] [CrossRef]
- Goncalves, H.; Goncalves, J.A.; Corte-Real, L. Measures for an objective evaluation of the geometric correction process quality. IEEE Geosci. Remote Sens. Lett. 2009, 6, 292–296. [Google Scholar] [CrossRef]
- Ma, W.; Wen, Z.; Wu, Y.; Jiao, L.; Gong, M.; Zheng, Y. Remote sensing image registration with modified sift and enhanced feature matching. IEEE Geosci. Remote Sens. Lett. 2016, 14, 3–7. [Google Scholar] [CrossRef]
- Rocco, I.; Arandjelović, R.; Sivic, J. Efficient neighbourhood consensus networks via submanifold sparse convolutions. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 605–621. [Google Scholar]
- Celik, T. Unsupervised change detection in satellite images using principal component analysis and k-means clustering. IEEE Geosci. Remote Sens. Lett. 2009, 6, 772–776. [Google Scholar] [CrossRef]
- Thompson, W.D.; Walter, S.D. A reappraisal of the kappa coefficient. J. Clin. Epidemiol. 1988, 41, 949–958. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Nred | RMSall | RMSLOO | Pquad | BPP(1.0) | Sknew | Scat | |
|---|---|---|---|---|---|---|---|---|
| SIFT | 17 | 1.2076 | 1.2139 | – | 0.6471 | 0.1367 | 0.9991 | 0.7048 |
| SAR-SIFT | 66 | 1.2455 | 1.2491 | 0.6300 | 0.6212 | 0.1251 | 0.9961 | 0.6784 |
| PSO-SIFT | 18 | 0.6975 | 0.7104 | – | 0.5556 | 0.0859 | 1.0000 | 0.5209 |
| DNN+RANSAC | 8 | 0.6471 | 0.6766 | – | 0.1818 | 0.0943 | 0.9766 | 0.4484 |
| SNCNet+RANSAC | 44 | 0.6565 | 0.6777 | 0.6665 | 0.3330 | 0.1410 | 1.0000 | 0.4946 |
| Ours | 39 | 0.4345 | 0.4893 | 0.6101 | 0.3124 | 0.1072 | 1.0000 | 0.4304 |
| Methods | Nred | RMSall | RMSLOO | Pquad | BPP(1.0) | Sknew | Scat | |
|---|---|---|---|---|---|---|---|---|
| SIFT | 11 | 0.9105 | 0.9436 | – | 0.5455 | 0.1055 | 0.9873 | 0.5908 |
| SAR-SIFT | 31 | 1.0998 | 1.1424 | 0.5910 | 0.7419 | 0.0962 | 1.0000 | 0.6636 |
| PSO-SIFT | 19 | 0.7191 | 0.7246 | – | 0.4211 | 0.0616 | 1.0000 | 0.4960 |
| DNN+RANSAC | 10 | 0.8024 | 0.8518 | – | 0.6000 | 0.1381 | 0.9996 | 0.5821 |
| SNCNet+RANSAC | 17 | 0.6043 | 0.6126 | – | 0.5839 | 0.1266 | 1.0000 | 0.5052 |
| Ours | 11 | 0.5923 | 0.6114 | – | 0.4351 | 0.0834 | 0.9990 | 0.4753 |
| Methods | Nred | RMSall | RMSLOO | Pquad | BPP(1.0) | Sknew | Scat | |
|---|---|---|---|---|---|---|---|---|
| SIFT | 69 | 1.1768 | 1.1806 | 0.9013 | 0.6812 | 0.0975 | 0.9922 | 0.7010 |
| SAR-SIFT | 151 | 1.2487 | 1.2948 | 0.6016 | 0.6755 | 0.1274 | 0.9980 | 0.6910 |
| PSO-SIFT | 132 | 0.6663 | 0.6685 | 0.6050 | 0.4621 | 0.1071 | 1.0000 | 0.5009 |
| DNN+RANSAC | 8 | 0.7293 | 0.7582 | – | 0.5000 | 0.1227 | 0.9766 | 0.5365 |
| SNCNet+RANSAC | 17 | 0.6484 | 0.6591 | – | 0.3529 | 0.1205 | 1.0000 | 0.4734 |
| Ours | 12 | 0.4645 | 0.4835 | – | 0.4000 | 0.1175 | 0.9999 | 0.4356 |
| Methods | Nred | RMSall | RMSLOO | Pquad | BPP(1.0) | Sknew | Scat | |
|---|---|---|---|---|---|---|---|---|
| SIFT | 88 | 1.1696 | 1.1711 | 0.6399 | 0.7841 | 0.1138 | 0.9375 | 0.6757 |
| SAR-SIFT | 301 | 1.1903 | 1.1973 | 0.8961 | 0.8671 | 0.1318 | 1.0000 | 0.7390 |
| PSO-SIFT | 54 | 0.6480 | 0.6527 | 0.5804 | 0.2778 | 0.1077 | 1.0000 | 0.4648 |
| DNN+RANSAC | 10 | 0.5784 | 0.5906 | – | 0.0000 | 0.1308 | 0.9999 | 0.3946 |
| SNCNet+RANSAC | 67 | 0.6468 | 0.6595 | 0.6097 | 0.4925 | 0.1381 | 1.0000 | 0.5085 |
| Ours | 52 | 0.5051 | 0.5220 | 0.6112 | 0.7692 | 0.1434 | 1.0000 | 0.5215 |
| Scales | Wuhan Data | YellowR1 Data | Yamba Data | YellowR2 Data |
|---|---|---|---|---|
| – | – | – | – | |
| 1.0418 | 1.0648 | 0.9127 | 0.8311 | |
| 0.9507 | 0.6821 | 0.6660 | 0.7647 | |
| 0.9700 | 1.0128 | 0.7720 | 0.5864 | |
| 0.7305 | 0.7944 | 0.9000 | 1.2858 | |
| Our Method | 0.4345 | 0.5923 | 0.5051 | 0.4645 |
| Datasets | SIFT | SAR-SIFT | PSO-SIFT | SNCNet- RANSAC | DNN- RANSAC | Ours |
|---|---|---|---|---|---|---|
| Wuhan | 15.133 | 34.089 | 12.508 | 42.224 | 117.420 | 173.472 |
| Yamba | 18.056 | 86.283 | 34.637 | 51.006 | 218.278 | 430.245 |
| YellowR1 | 51.645 | 72.093 | 37.213 | 79.093 | 491.596 | 711.874 |
| YellowR2 | 79.907 | 133.519 | 366.939 | 96.919 | 952.297 | 1160.083 |
| Methods | SIFT | SAR-SIFT | PSO-SIFT | DNN+RANSAC | SNANet+RANSAC | Ours |
|---|---|---|---|---|---|---|
| RMSall | 1.2651 | 1.2271 | 0.6676 | 0.6454 | 0.5144 | 0.4970 |
| Kappa | 0.4796 | 0.4865 | 0.5259 | 0.5305 | 0.5376 | 0.5594 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, S.; Yang, J.; Gou, S.; Jiao, L.; Xiong, T.; Xiong, L. Multi-Scale Fused SAR Image Registration Based on Deep Forest. Remote Sens. 2021, 13, 2227. https://doi.org/10.3390/rs13112227
Mao S, Yang J, Gou S, Jiao L, Xiong T, Xiong L. Multi-Scale Fused SAR Image Registration Based on Deep Forest. Remote Sensing. 2021; 13(11):2227. https://doi.org/10.3390/rs13112227
Chicago/Turabian StyleMao, Shasha, Jinyuan Yang, Shuiping Gou, Licheng Jiao, Tao Xiong, and Lin Xiong. 2021. "Multi-Scale Fused SAR Image Registration Based on Deep Forest" Remote Sensing 13, no. 11: 2227. https://doi.org/10.3390/rs13112227
APA StyleMao, S., Yang, J., Gou, S., Jiao, L., Xiong, T., & Xiong, L. (2021). Multi-Scale Fused SAR Image Registration Based on Deep Forest. Remote Sensing, 13(11), 2227. https://doi.org/10.3390/rs13112227