
Small PN-Code Lidar for Asteroid and Comet Missions—Receiver Processing and Performance Simulations


Abstract
:1. Introduction
2. Materials and Methods
2.1. PN Code Ranging
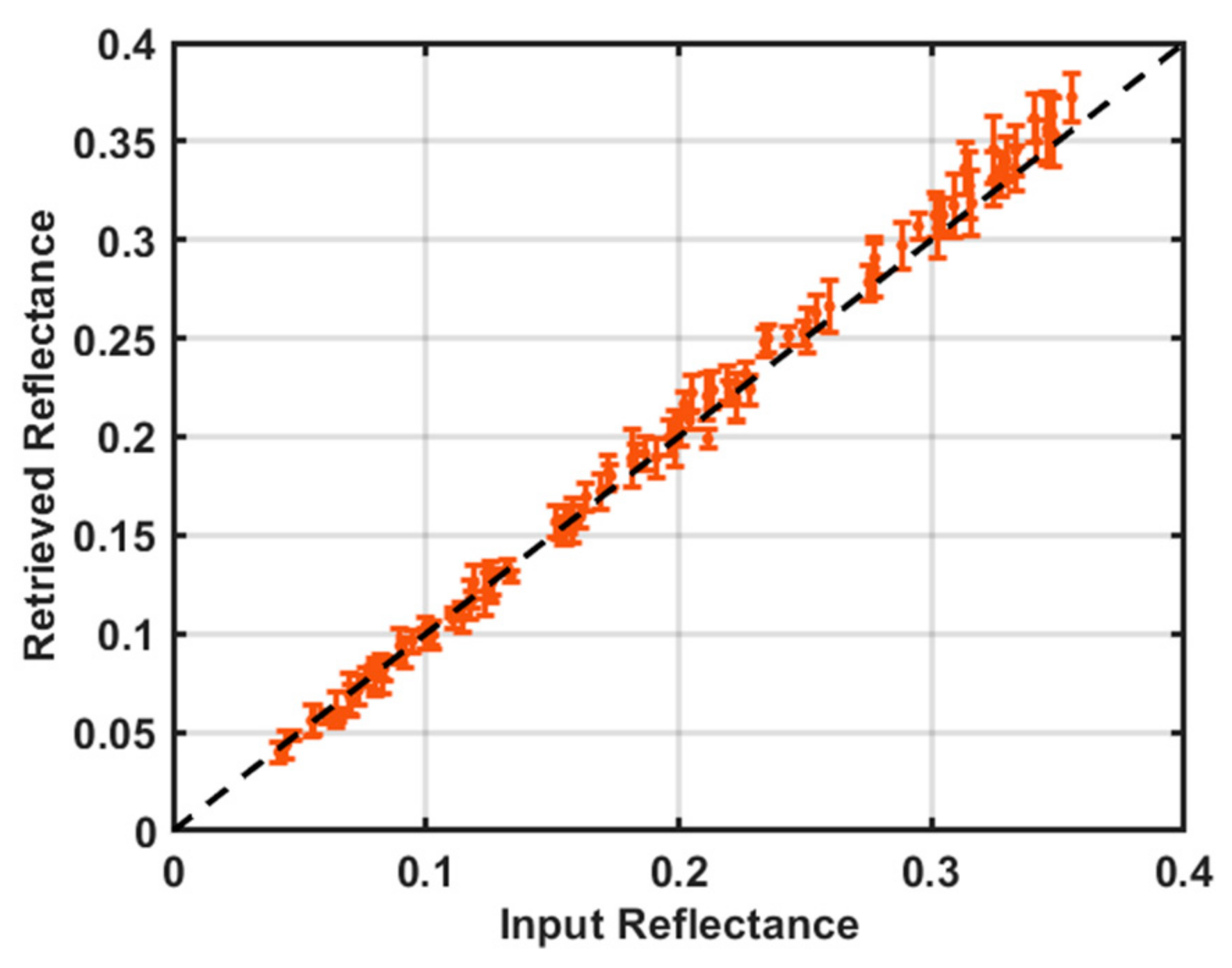
2.2. Surface Reflectance Measurement
2.3. Sampling Rate Considerations
2.3.1. Sampling Error
2.3.2. Correlation Length and Code Length
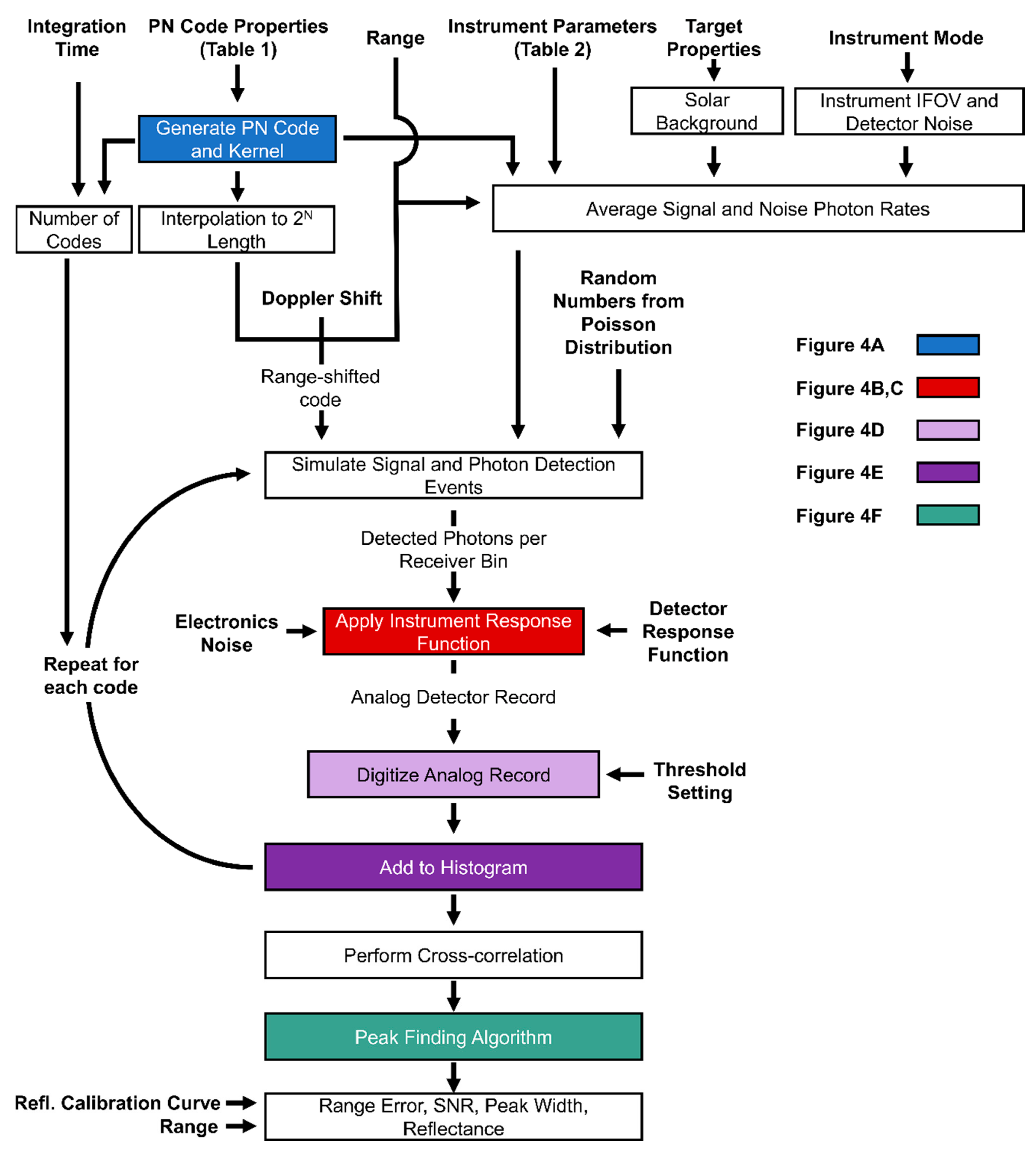
2.4. SALi Performance Model and Simulations
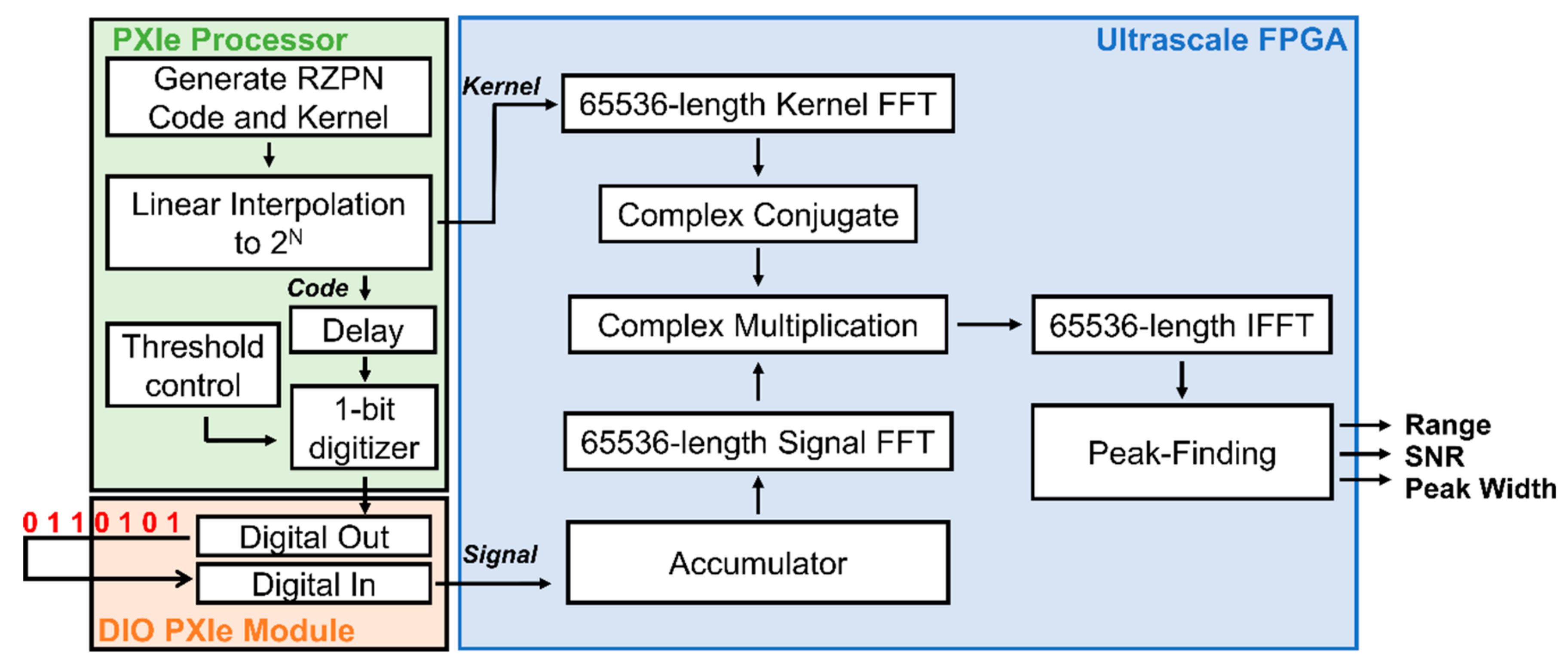
2.4.1. Signal and Kernel Generation and Mode Selection
2.4.2. Simulating Doppler Shift
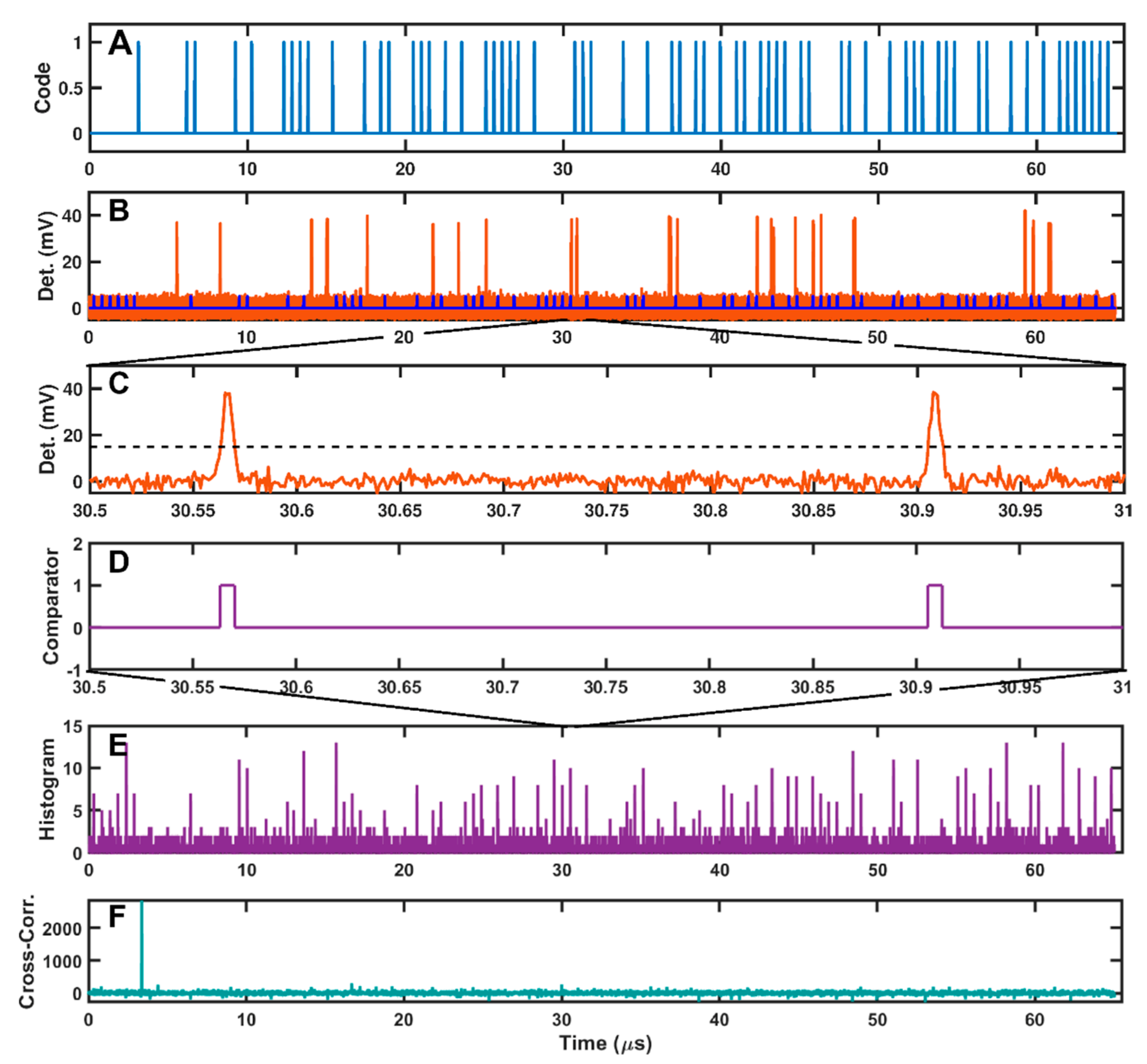
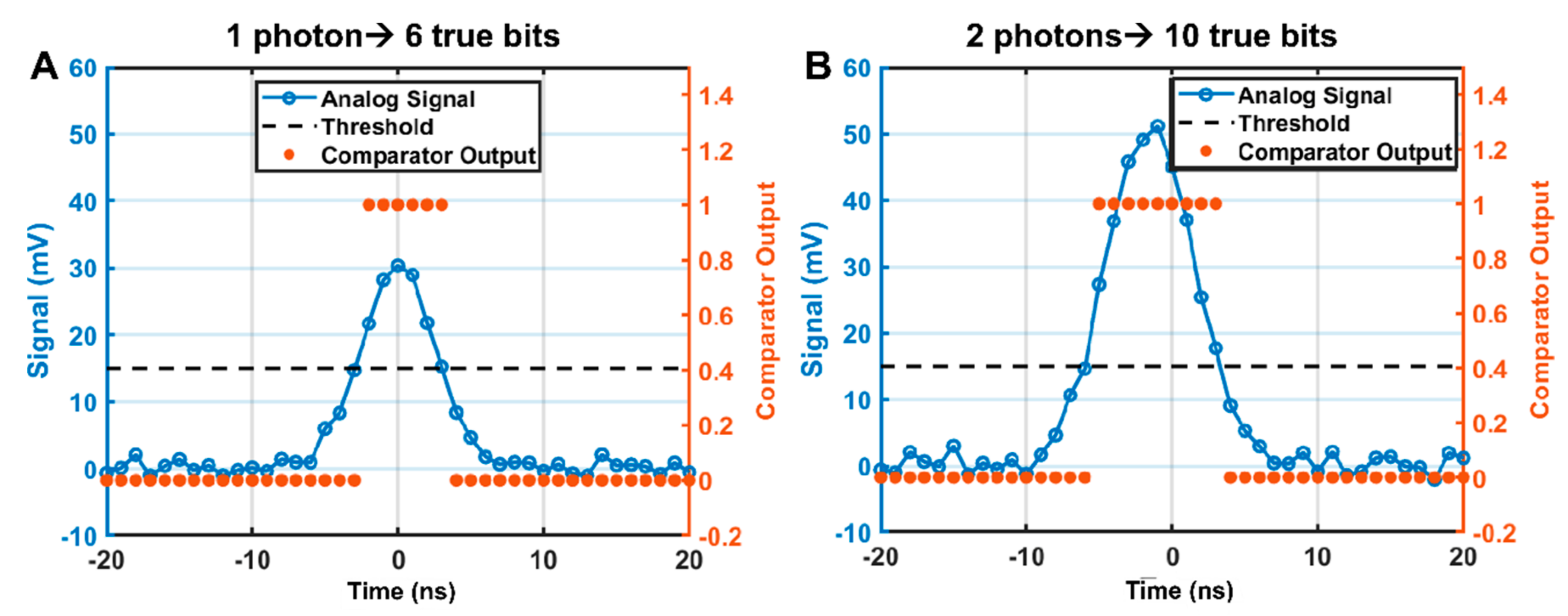
2.4.3. Simulation of the Detected Signal and Noise Events
2.5. Bennu Orbit Simulation
2.6. Reflectance Measurement
3. Results
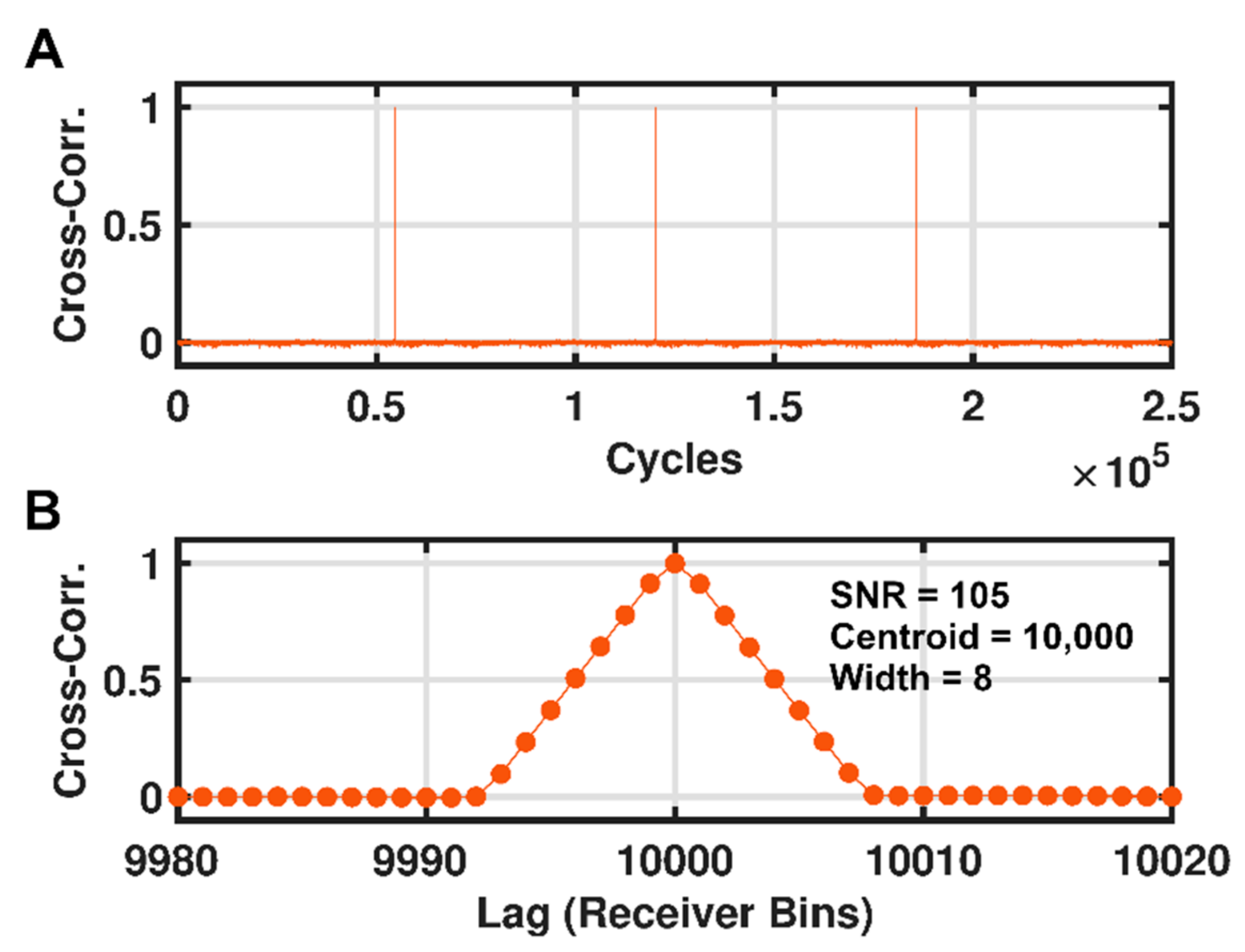
3.1. Simulated PN Code Lidar Performance
3.2. Simulated SALi Performance
3.3. Doppler Effect
3.4. Simulation Results for a Bennu Orbit
3.5. Reflectance Measurement
3.6. Data Processing Time with a XCKU060 FPGA
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jewitt, D.; Haghighipour, N. Irregular Satellites of the Planets: Products of Capture in the Early Solar System. Annu. Rev. Astron. Astrophys. 2007, 45, 261–295. [Google Scholar] [CrossRef] [Green Version]
- Levison, H.F.; Bottke, W.F.; Gounelle, M.; Morbidelli, A.; Nesvorný, D.; Tsiganis, K. Contamination of the asteroid belt by primordial trans-Neptunian objects. Nature 2009, 460, 364–366. [Google Scholar] [CrossRef] [PubMed]
- Bottke, W.F.; Nesvorný, D.; Vokrouhlický, D.; Morbidelli, A. The irregular satellites: The most collisionally evolved populations in the solar system. Astron. J. 2010, 139, 994–1014. [Google Scholar] [CrossRef] [Green Version]
- Binzel, R.P.; DeMeo, F.E.; Turtelboom, E.V.; Bus, S.J.; Tokunaga, A.; Burbine, T.H.; Lantz, C.; Polishook, D.; Carry, B.; Morbidelli, A.; et al. Compositional distributions and evolutionary processes for the near-Earth object population: Results from the MIT-Hawaii Near-Earth Object Spectroscopic Survey (MITHNEOS). Icarus 2019, 324, 41–76. [Google Scholar] [CrossRef] [Green Version]
- Zuber, M.T.; Smith, D.E.; Cheng, A.F.; Cole, T.D. The NEAR laser ranging investigation. J. Geophys. Res. E Planets 1997, 102, 23761–23773. [Google Scholar] [CrossRef]
- Yoshimitsu, T.; Kawaguchi, J.; Hashimoto, T.; Kubota, T.; Uo, M.; Morita, H.; Shirakawa, K. Hayabusa-final autonomous descent and landing based on target marker tracking. Acta Astronaut. 2009, 65, 657–665. [Google Scholar] [CrossRef]
- Mizuno, T.; Kase, T.; Shiina, T.; Mita, M.; Namiki, N.; Senshu, H.; Yamada, R.; Noda, H.; Kunimori, H.; Hirata, N.; et al. Development of the Laser Altimeter (LIDAR) for Hayabusa2. Space Sci. Rev. 2017, 208, 33–47. [Google Scholar] [CrossRef]
- Daly, M.G.; Barnouin, O.S.; Dickinson, C.; Seabrook, J.; Johnson, C.L.; Cunningham, G.; Haltigin, T.; Gaudreau, D.; Brunet, C.; Aslam, I.; et al. The OSIRIS-REx Laser Altimeter (OLA) Investigation and Instrument. Space Sci. Rev. 2017, 212, 899–924. [Google Scholar] [CrossRef]
- Sornsin, B.A.; Short, B.W.; Bourbeau, T.; Dahlin, M. Global shutter solid state flash lidar for spacecraft navigation and docking applications. In Proceedings of SPIE, Proceedings of the Laser Radar Technology and Applications XXIV, Baltimore, MD, USA, 14–18 April 2019; p. 110050W. [Google Scholar]
- Smith, D.E.; Sun, X.; Mazarico, E.M.; Zuber, M.T. Asteroid Lidar for Topography, Mapping, and Landing. In Proceedings of the Lunar and Planetary Science Conference, The Woodlands, TX, USA, 18–22 March 2019; p. 1421. [Google Scholar]
- Sun, X.; Cremons, D.R.; Mazarico, E.; Yang, G.; Abshire, J.B.; Smith, D.E.; Zuber, M.T.; Storm, M.; Martin, N.; Hwang, J.; et al. Small All-range Lidar for Asteroid and Comet Core Missions. Sensors 2021, 21, 3081. [Google Scholar] [CrossRef]
- Macwilliams, F.J.; Sloane, N.J.A. Pseudo Random Sequences and Arrays. Proc. IEEE 1976, 64, 1715–1729. [Google Scholar] [CrossRef]
- Takeuchi, N.; Sugimoto, N.; Baba, H.; Sakurai, K. Random modulation cw lidar. Appl. Opt. 1983, 22, 1382–1386. [Google Scholar] [CrossRef]
- Sarwate, D.V.; Pursley, M.B. Crosscorrelation Properties of Pseudorandom and Related Sequences. Proc. IEEE 1980, 68, 593–619. [Google Scholar] [CrossRef]
- Sun, X.; Abshire, J.B.; Krainak, M.A.; Hasselbrack, W.B. Photon counting pseudorandom noise code laser altimeters. In Proceedings of the Advanced Photon Counting Techniques II, Boston, MA, USA, 9–12 September 2007; p. 67710O. [Google Scholar]
- Cochenour, B.; Mullen, L.; Muth, J. Modulated pulse laser with pseudorandom coding capabilities for underwater ranging, detection, and imaging. Appl. Opt. 2011, 50, 6168–6178. [Google Scholar] [CrossRef]
- Degnan, J.J. Photon-counting multikilohertz microlaser altimeters for airborne and spaceborne topographic measurements. J. Geodyn. 2002, 33, 503–549. [Google Scholar] [CrossRef] [Green Version]
- Matthey, R.; Mitev, V. Pseudo-random noise-continuous-wave laser radar for surface and cloud measurements. Opt. Lasers Eng. 2005, 43, 557–571. [Google Scholar] [CrossRef]
- Takeuchi, N.; Baba, H.; Sakurai, K.; Ueno, T. Diode-laser random-modulation cw lidar. Appl. Opt. 1986, 25, 63–67. [Google Scholar] [CrossRef]
- Machol, J.L. Comparison of the pseudorandom noise code and pulsed direct-detection lidars for atmospheric probing. Appl. Opt. 1997, 36, 6021–6023. [Google Scholar] [CrossRef]
- Zhang, Y.; He, Y.; Yang, F.; Luo, Y.; Chen, W. Three-dimensional imaging lidar system based on high speed pseudorandom modulation and photon counting. Chin. Opt. Lett. 2016, 14, 111101. [Google Scholar] [CrossRef] [Green Version]
- Krichel, N.J.; McCarthy, A.; Buller, G.S. Resolving range ambiguity in a photon counting depth imager operating at kilometer distances. Opt. Express 2010, 18, 9192–9206. [Google Scholar] [CrossRef]
- McCarthy, A.; Collins, R.J.; Krichel, N.J.; Fernández, V.; Wallace, A.M.; Buller, G.S. Long-range time-of-flight scanning sensor based on high-speed time-correlated single-photon counting. Appl. Opt. 2009, 48, 6241–6251. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Abshire, J.B. Modified PN code laser modulation technique for laser measurements. In Proceedings of the Free-Space Laser Communication Technologies XXI, San Jose, CA, USA, 24–29 January 2009; Volume 7199P, p. 71990P. [Google Scholar]
- Abshire, J.B.; Sun, X. Modified PN Codes for Laser Remote Sensing Measurements. In Proceedings of the Conference on Lasers and Electro-Optics/International Quantum Electronics Conference, Baltimore, MD, USA, 31 May–5 June 2009; p. CFJ4. [Google Scholar]
- Abshire, J.B.; Sun, X.S. Time Delay and Distance Measurement. U.S. Patent 7,982,861, 19 July 2011. [Google Scholar]
- Lucey, P.G.; Neumann, G.A.; Riner, M.A.; Mazarico, E.; Smith, D.E.; Zuber, M.T.; Paige, D.A.; Bussey, D.B.; Cahill, J.T.; McGovern, A.; et al. The global albedo of the Moon at 1064 nm from LOLA. J. Geophys. Res. Planets 2014, 119, 1665–1679. [Google Scholar] [CrossRef]
- Lemelin, M.; Lucey, P.G.; Neumann, G.A.; Mazarico, E.M.; Barker, M.K.; Kakazu, A.; Trang, D.; Smith, D.E.; Zuber, M.T. Improved calibration of reflectance data from the LRO Lunar Orbiter Laser Altimeter (LOLA) and implications for space weathering. Icarus 2016, 273, 315–328. [Google Scholar] [CrossRef]
- Gardner, C.S. Target signatures for laser altimeters: An analysis. Appl. Opt. 1982. [Google Scholar] [CrossRef] [PubMed]
- Goodman, J.W. Some Effects of Target-Induced Scintillation on Optical Radar Performance. Proc. IEEE 1965, 53, 1688–1700. [Google Scholar] [CrossRef]
- Chen, J.R.; Numata, K.; Wu, S.T. Error analysis for lidar retrievals of atmospheric species from absorption spectra. Opt. Express 2019, 27, 36487. [Google Scholar] [CrossRef]
- Sullivan, W.; Beck, J.; Scritchfield, R.; Skokan, M.; Mitra, P.; Sun, X.; Abshire, J.; Carpenter, D.; Lane, B. Linear-Mode HgCdTe Avalanche Photodiodes for Photon-Counting Applications. J. Electron. Mater. 2015, 44, 3092–3101. [Google Scholar] [CrossRef]
- Daly, M.G.; Barnouin, O.S.; Seabrook, J.A.; Roberts, J.; Dickinson, C.; Walsh, K.J.; Jawin, E.R.; Palmer, E.E.; Gaskell, R.; Weirich, J.; et al. Hemispherical differences in the shape and topography of asteroid (101955) Bennu. Sci. Adv. 2020, 6, eabd3649. [Google Scholar] [CrossRef] [PubMed]
- Ernst, C.M.; Barnouin, O.S.; Daly, R.T. The small body mapping tool (sbmt) for accessing, visualizing, and analyzing spacecraft data in three dimensions. In Proceedings of the 49th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 19–23 March 2018; p. 2083. [Google Scholar]
- Barucci, M.A.; Hasselmann, P.H.; Praet, A.; Fulchignoni, M.; Deshapriya, J.D.P.; Fornasier, S.; Merlin, F.; Clark, B.E.; Simon, A.A.; Hamilton, V.E.; et al. OSIRIS-REx spectral analysis of (101955) Bennu by multivariate statistics. Astron. Astrophys. 2020, 637, L4. [Google Scholar] [CrossRef]
- DellaGiustina, D.N.; Burke, K.N.; Walsh, K.J.; Smith, P.H.; Golish, D.R.; Bierhaus, E.B.; Ballouz, R.L.; Becker, T.L.; Campins, H.; Tatsumi, E.; et al. Variations in color and reflectance on the surface of asteroid (101955) Bennu. Science 2020, 370. [Google Scholar] [CrossRef]
- Bennett, C.A.; DellaGiustina, D.N.; Becker, K.J.; Becker, T.L.; Edmundson, K.L.; Golish, D.R.; Bennett, R.J.; Burke, K.N.; Cue, C.N.U.; Clark, B.E.; et al. A high-resolution global basemap of (101955) Bennu. Icarus 2021, 357, 113690. [Google Scholar] [CrossRef]
- Yu, Y.; Liu, B.; Chen, Z. Analyzing the performance of pseudo-random single photon counting ranging Lidar. Appl. Opt. 2018, 57, 7733–7739. [Google Scholar] [CrossRef] [PubMed]
- Gardner, C.S. Ranging performance of satellite laser altimeters. IEEE Trans. Geosci. Remote Sens. 1992, 20, 1061–1072. [Google Scholar] [CrossRef] [Green Version]
- Rose, T.S.; Rowen, D.W.; LaLumondiere, S.; Werner, N.I.; Linares, R.; Faler, A.; Wicker, J.; Coffman, C.M.; Maul, G.A.; Chien, D.H.; et al. Optical communications downlink from a 1.5U Cubesat: OCSD program. In Proceedings of the International Conference on Space Optics—ICSO 2018, Chania, Greece, 9–12 October 2018; Volume 11180, p. 18. [Google Scholar]
- Kitazato, K.; Clark, B.E.; Abe, M.; Abe, S.; Takagi, Y.; Hiroi, T.; Barnouin-Jha, O.S.; Abell, P.A.; Lederer, S.M.; Vilas, F. Near-infrared spectrophotometry of Asteroid 25143 Itokawa from NIRS on the Hayabusa spacecraft. Icarus 2008, 194, 137–145. [Google Scholar] [CrossRef]
- Xilinx Kintext Ultrascale Product Table. Available online: https://www.xilinx.com/products/silicon-devices/fpga/kintex-ultrascale.html#productTable (accessed on 9 April 2019).
- Maillard, P.; Barton, J.; Hart, M. Total Ionizing Dose and Single-Event characterization of Xilinx 20nm Kintex Ultrascale. In Proceedings of the European Conference on Radiation and its Effects on Components and Systems, Cannes, France, 15–19 September 1997. [Google Scholar]
- Maillard, P.; Hart, M.; Barton, J.; Jain, P.; Karp, J. Neutron, 64 MeV proton, thermal neutron and alpha single-event upset characterization of Xilinx 20nm UltraScale Kintex FPGA. In Proceedings of the IEEE Radiation Effects Data Workshop, Boston, MA, USA, 13–17 July 2015. [Google Scholar]
- Oppenheim, A.V.; Weinstein, C.J. Effects of Finite Register Length in Digital Filtering and the Fast Fourier Transform. Proc. IEEE 1972, 60, 957–976. [Google Scholar] [CrossRef]
- Welch, P.D. A Fixed-Point Fast Fourier Transform Error Analysis. IEEE Trans. Audio Electroacoust. 1969, 17, 151–157. [Google Scholar] [CrossRef]
- Abshire, J.B.; Sun, X.; Afzal, R.S. Mars Orbiter Laser Altimeter: Receiver model and performance analysis. Appl. Opt. 2000, 39, 2449. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Code Length | 127 bits |
| Bit Duration | 512 ns |
| Code Period | 65,024 ns |
| Pulse Duration | 8 ns |
| RZ Ratio | 64 |
| Laser Duty Cycle | 0.78125% |
| Bit rate (MHz) | 1.953125 MHz |
| Unambiguous Range | 9746.9 m |
| Signal Sampling Rate | 1.00787 GHz |
| Parameter | Value |
|---|---|
| Laser Wavelength | 1550 nm |
| Average Laser Output Power | 2 W |
| Solar Distance | 1 A.U. |
| Target Reflectance | 5% |
| Telescope Diameter | 6.4 cm |
| Bandpass Filter FWHM | 1 nm |
| Detector | 16-pixel HgCdTe APD |
| Pixel Layout | 2 × 8 |
| Pixel IFOV | 60 µrad |
| Detector Quantum Efficiency | 60% |
| Detector Dark Counts per Pixel | 250 kHz |
| Detector Response Time | 3 ns |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cremons, D.R.; Sun, X.; Abshire, J.B.; Mazarico, E. Small PN-Code Lidar for Asteroid and Comet Missions—Receiver Processing and Performance Simulations. Remote Sens. 2021, 13, 2282. https://doi.org/10.3390/rs13122282
Cremons DR, Sun X, Abshire JB, Mazarico E. Small PN-Code Lidar for Asteroid and Comet Missions—Receiver Processing and Performance Simulations. Remote Sensing. 2021; 13(12):2282. https://doi.org/10.3390/rs13122282
Chicago/Turabian StyleCremons, Daniel R., Xiaoli Sun, James B. Abshire, and Erwan Mazarico. 2021. "Small PN-Code Lidar for Asteroid and Comet Missions—Receiver Processing and Performance Simulations" Remote Sensing 13, no. 12: 2282. https://doi.org/10.3390/rs13122282
APA StyleCremons, D. R., Sun, X., Abshire, J. B., & Mazarico, E. (2021). Small PN-Code Lidar for Asteroid and Comet Missions—Receiver Processing and Performance Simulations. Remote Sensing, 13(12), 2282. https://doi.org/10.3390/rs13122282