
A Case Study of the 3D Water Vapor Tomography Model Based on a Fast Voxel Traversal Algorithm for Ray Tracing


Abstract
:1. Introduction
2. Materials and Methods
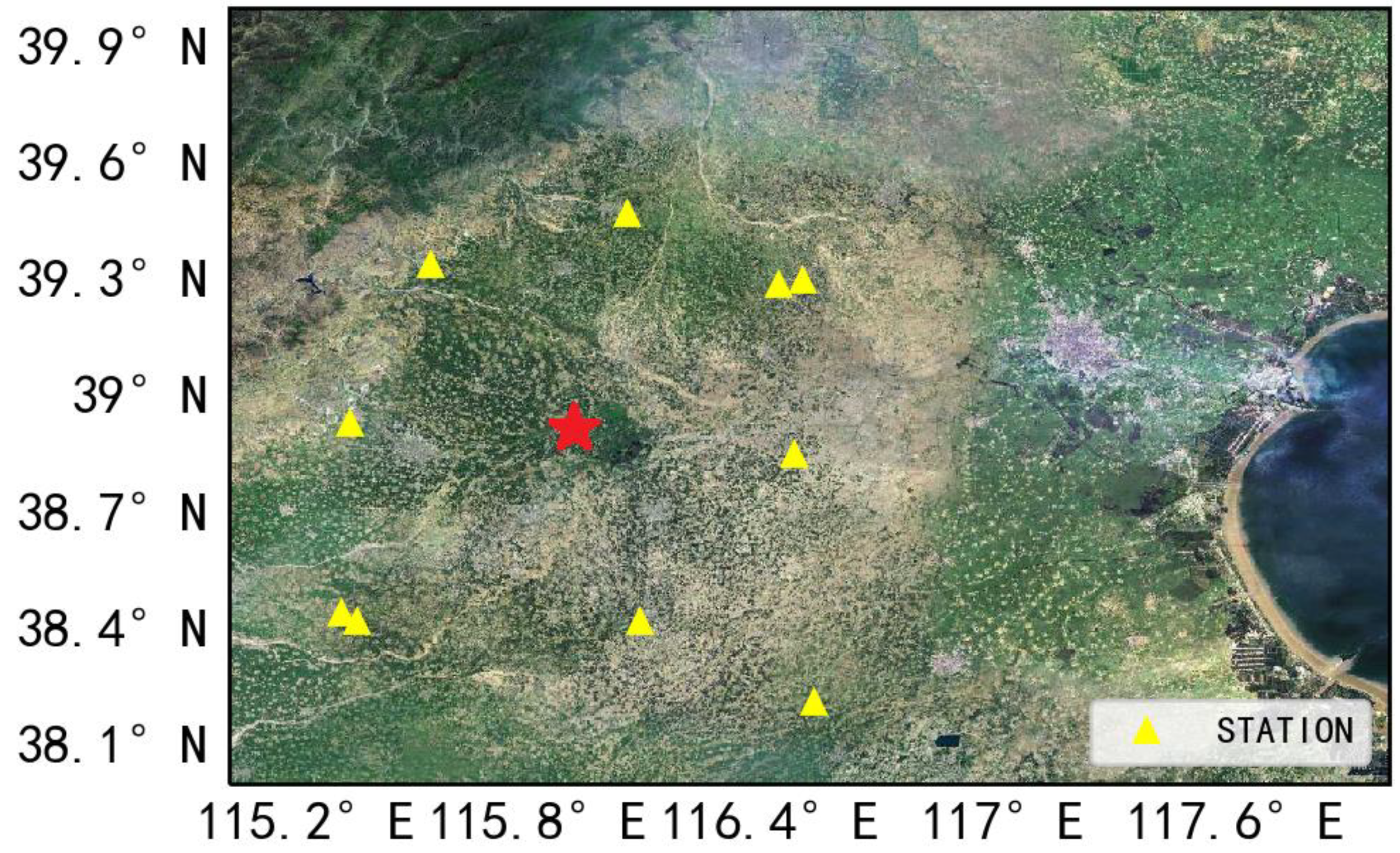
2.1. Data Introduction
2.2. Methodology
3. Model Building
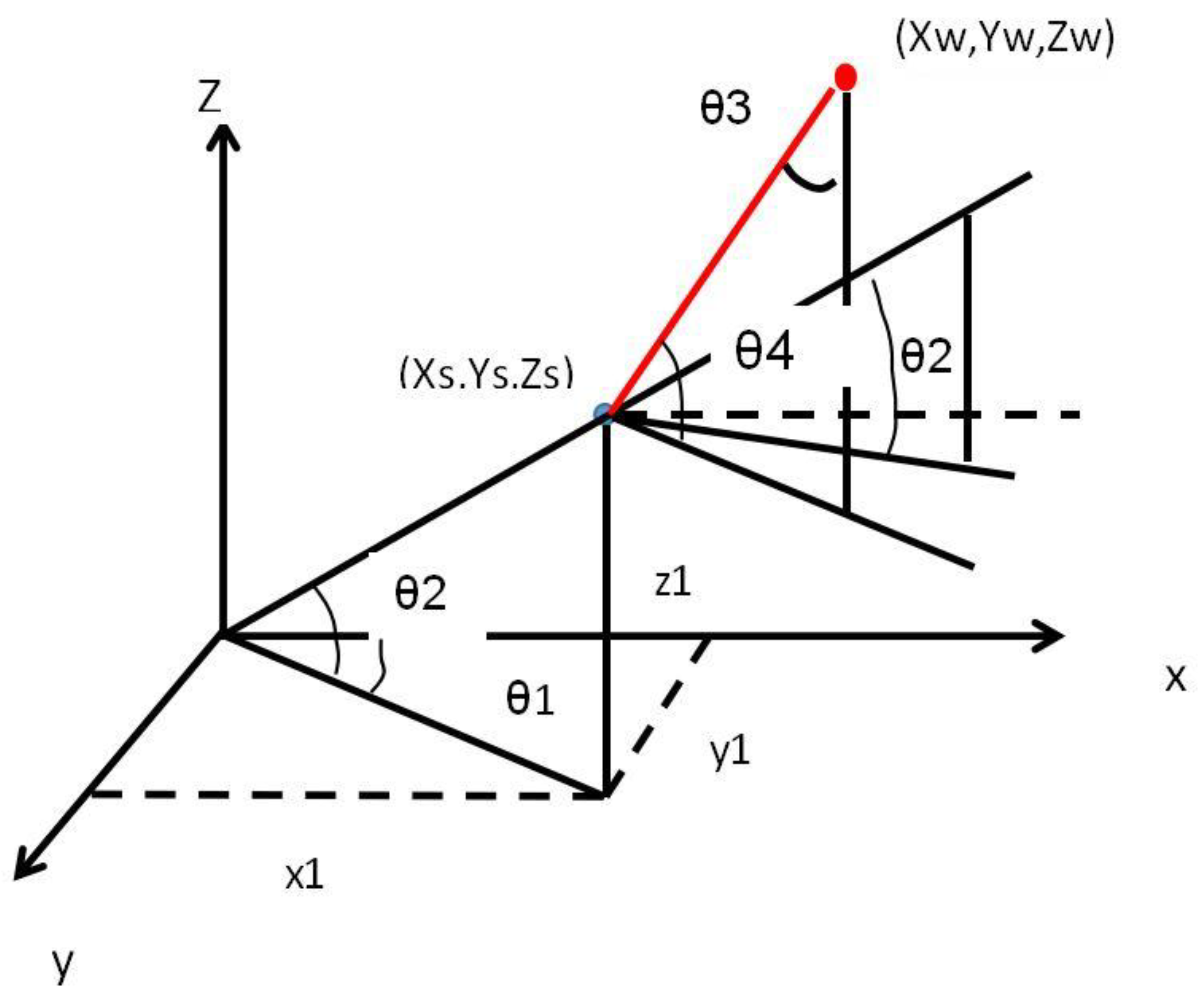
3.1. Unification of Coordinate System
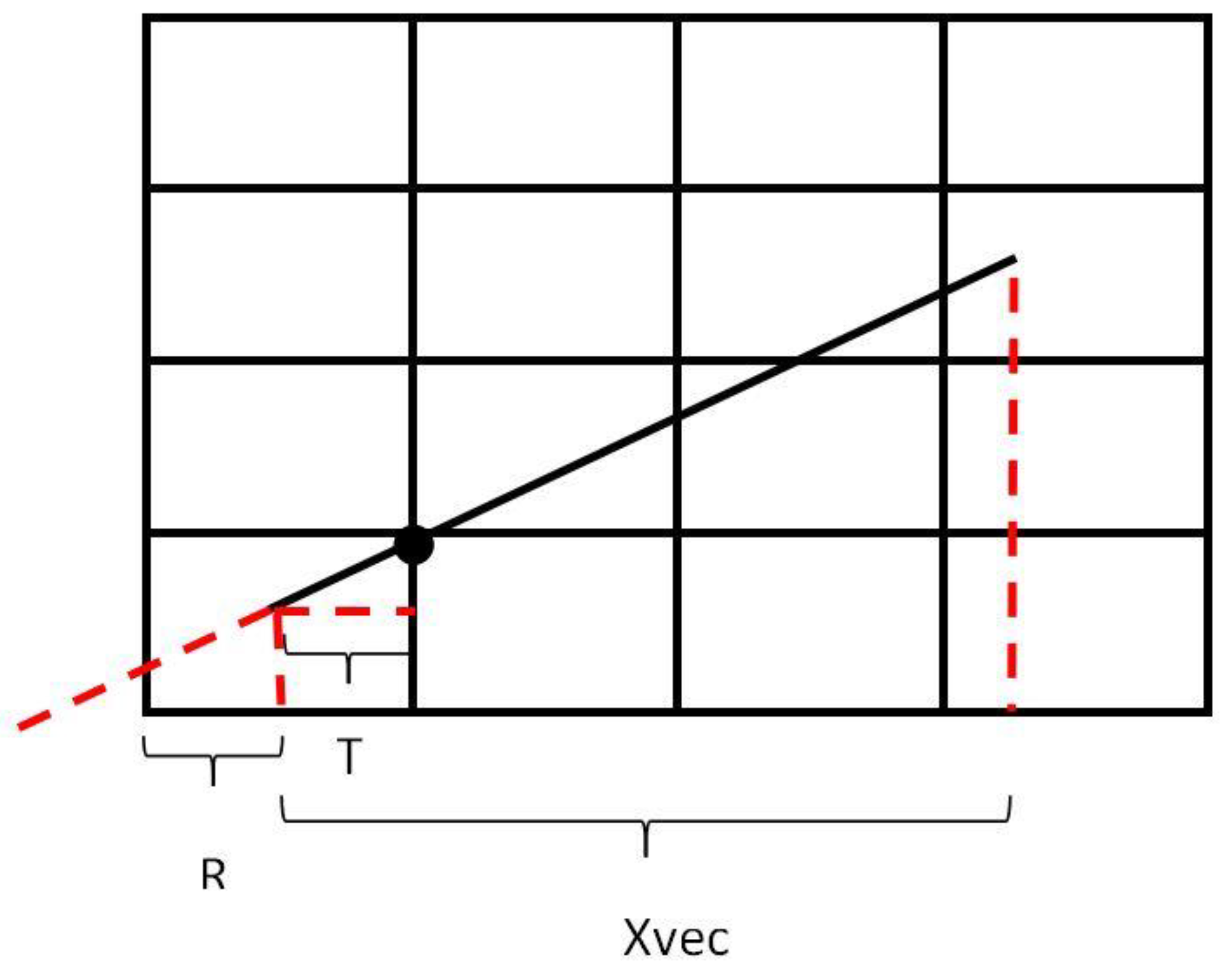
3.2. The Intercept of the Signal Line and the Grid
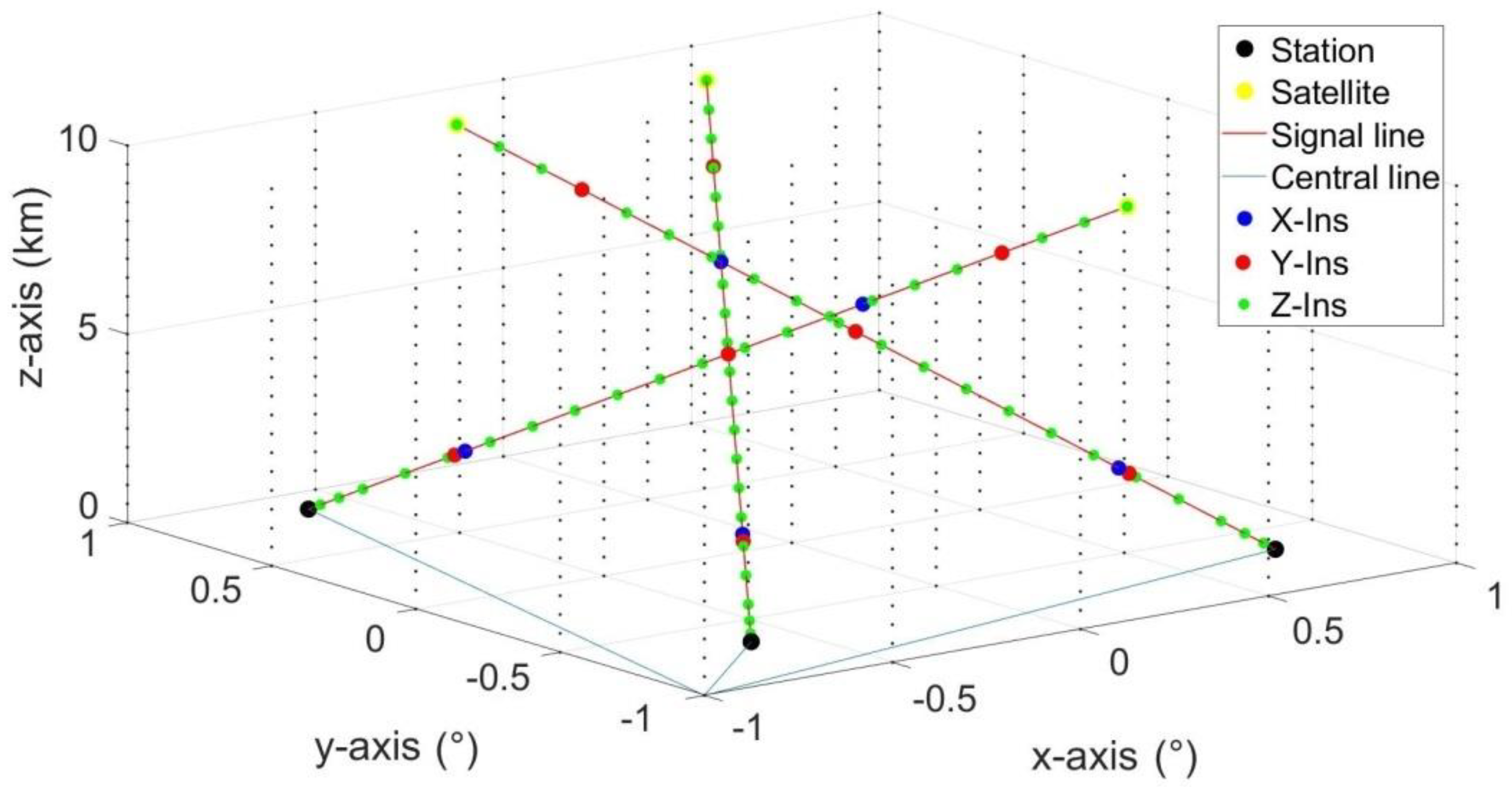
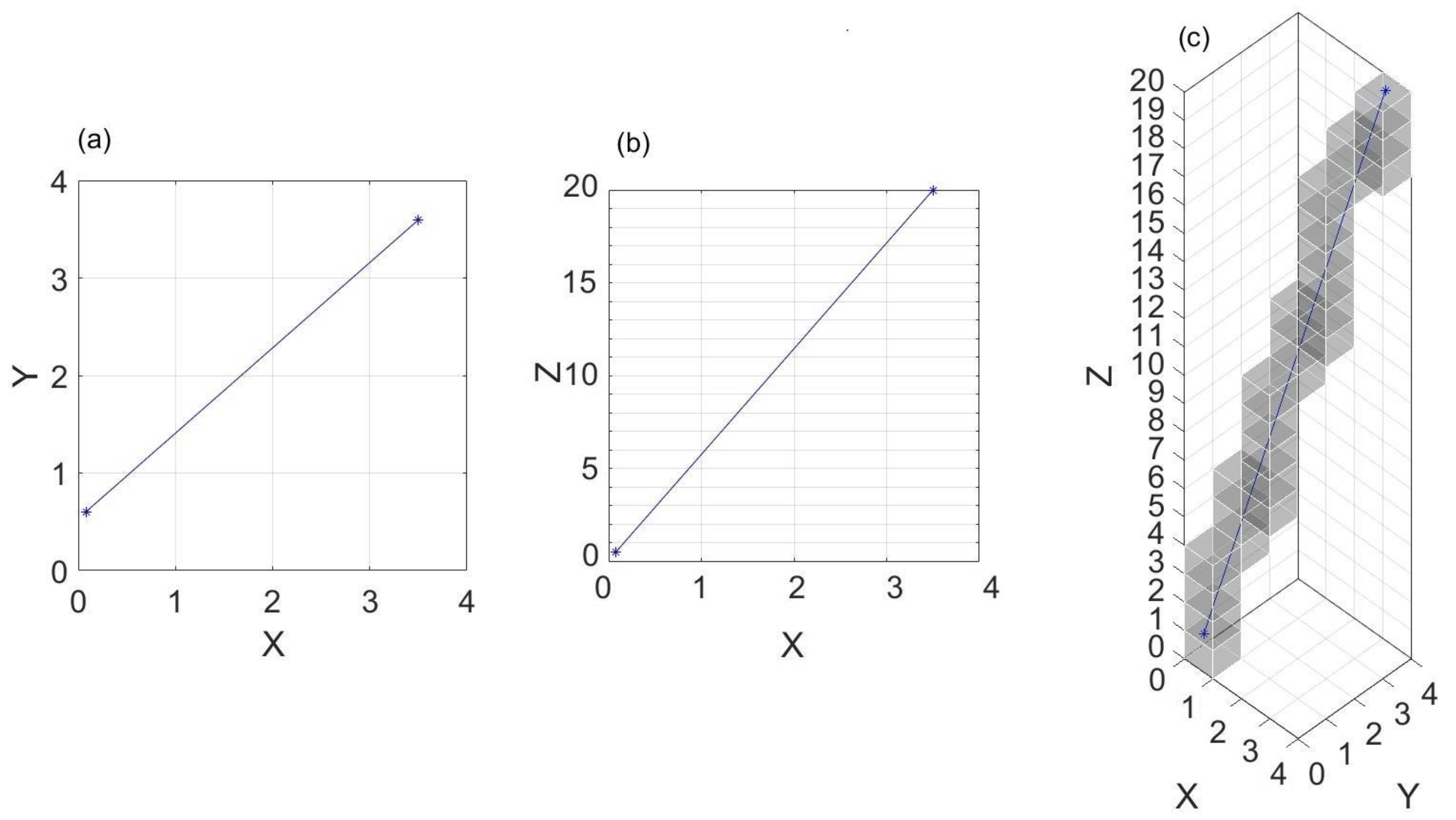
3.3. Indexing by a Fast Voxel Traversal Algorithm for Ray Tracing
3.4. Formation and Solution of Equation Group
3.4.1. Observation Equation
3.4.2. Horizontal Constraint Matrix Equation
3.4.3. Vertical Constraint Matrix Equation
3.4.4. Boundary Constraint Matrix Equation
3.4.5. Solving Equations
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Braun, J.; Rocken, C.; Ware, R. Validation of line-of-sight water vapor measurements with GPS. Radio Sci. 2001, 36, 459–472. [Google Scholar] [CrossRef] [Green Version]
- Sherwood, S.C.; Roca, R.; Weckwerth, T.M.; Andronova, N. Tropospheric water vapor, convection, and climate. Rev. Geophys. Am. Geophys. Union 2010, 48, RG2001. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Huang, D. Reviews and prospects of researches on remote sensing of regional atmospheric water vapor using ground-based GPS. Meteorol. Sci. Technol. 2004, 32, 201–205. [Google Scholar]
- Bi, Y.; Mao, J.; Liu, X.; Fu, Y. Remote sensing of the amount of water vapor along the slant path using the ground-base GPS. Chin. J. Geophys. 2006, 49, 335–342. [Google Scholar] [CrossRef]
- Song, S. Sensing Three Dimensional Water Vapor Structure with Ground-Based GPS Network and the Application in Meteorology. Ph.D. Thesis, Shanghai Astronomical Observatory, Chinese Academy of Sciences, Shanghai, China, 2004. [Google Scholar]
- Van Baelen, J.; Reverdy, M.; Tridon, F.; Labbouz, L.; Dick, G.; Bender, M.; Hagen, M. On the relationship between water vapour field evolution and the life cycle of precipitation systems. Q. J. R. Meteorol. Soc. 2011, 137, 204–223. [Google Scholar] [CrossRef] [Green Version]
- Labbouz, L.; Van Baelen, J.; Tridon, F.; Reverdy, M.; Hagen, M.; Bender, M.; Dick, G.; Gorgas, T.; Planche, C. Precipitation on the lee side of the Vosges Mountains: Multi-instrumental study of one case from the COPS campaign. Meteorol. Z. 2013, 22, 413–432. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Q.; Liu, Y.; Ma, X.; Yao, W.; Yao, Y.; Li, X. An Improved Rainfall Forecasting Model Based on GNSS Observations. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4891–4900. [Google Scholar] [CrossRef]
- Wang, W. Researching on 3-D Water Vapor Tomography of Ground Based GPS and Its Application. Ph.D. Thesis, Shanghai Astronomical Observatory, Chinese Academy of Sciences, Shanghai, China, 15 July 2011. [Google Scholar]
- Barnes, D. GPS Statusand Modernization; Munich Satellite Navigation Summit: Munich, Germany, 2019. [Google Scholar]
- Zrinjski, M.; Barković, Đ.; Matika, K. Development and Modernization of GNSS. Geod. List 2019, 73, 45–65. [Google Scholar]
- Hein, G.W. Status, perspectives and trends of satellite navigation. Satell. Navig. 2020, 1, 22. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, Y.; Cao, X.; Zhou, F.; Xia, P. An optimal tropospheric tomography method based on the multi-GNSS observations. Remote Sens. 2018, 10, 234. [Google Scholar] [CrossRef] [Green Version]
- Kuo, Y.H.; Zou, X.; Guo, Y.R. Variational Assimilation of Precipitable Water Using a Nonhydrostatic Mesoscale Adjoint Model. Part I: Moisture Retrieval and Sensitivity Experiments. Mon. Weather Rev. 1996, 124, 122–147. [Google Scholar] [CrossRef] [Green Version]
- Gutman, S.I.; Holub, K.L.; Sahm, S.R.; Stewart, J.Q.; Schwartz, B.E. Rapid retrieval and assimilation of ground based GPS-Met Observations at NOAA Forecast System Laboratory: Impact on Weather Forecasts. J. Meteorol. Soc. Jpn. 2004, 82, 351–360. [Google Scholar] [CrossRef] [Green Version]
- Smith, T.L.; Weygandt, S.S.; Benjamin, S.G.; Gutman, S.I.; Sahm, S. GPS-IPW observations and their assimilation in the 20-km RUC during sever weather season. In Proceedings of the Preprints 22th Conference on Severe Local Storms, Hyannis, MA, USA, 3–8 October 2004. [Google Scholar]
- Yuan, Z. Variational assimilation of GPS precipatable water into MM5 mesoscale model. Acta Meteorol. Sin. 2005, 63, 391–404. [Google Scholar]
- Ajjaji, R.; Al-Katheri, A.A.; Dhanhani, A. Tuning of WRF 3D-Var data assimilation system over Middle-East and Arabian Peninsula. In Proceedings of the 8th WRF Users Workshop, Boulder, CO, USA, 1–15 June 2007. [Google Scholar]
- Radhakrishna, B.; Fabry, F.; Braun, J.J.; Hove, T.V. Precipitable water from GPS over the continental United States: Diurnal cycle, intercomparisons with NARR, and link with convective initiation. J. Clim. 2015, 28, 2584–2599. [Google Scholar] [CrossRef]
- Seko, H.; Shimada, S.; Nakamura, H.; Kato, T. Three dimensional distribution of water vapor estimated from tropospheric delay of GPS data in a mesoscale precipitation system of the Baiu front. Earth Planets Space 2000, 52, 927–933. [Google Scholar] [CrossRef] [Green Version]
- Champollion, C.; Masson, F.; Bouin, M.; Walpersdorf, A.; Doerflinger, E.; Bock, O.; Van Baelen, J. GPS water vapour tomography: Preliminary results from the ESCOMPTE field experiment. Atmos Res. 2005, 74, 253–274. [Google Scholar] [CrossRef] [Green Version]
- Troller, M.; Geiger, A.; Brockmann, E.; Kahle, H. Determination of the spatial and temporal variation of tropospheric water vapour using CGPS networks. Geophys. J. Int. 2006, 167, 509–520. [Google Scholar] [CrossRef] [Green Version]
- Notarpietro, R.; Cucca, M.; Gabella, M.; Venuti, G.; Perona, G. Tomographic reconstruction of wet and total refractivity fields from GNSS receiver networks. Adv. Space Res. 2011, 47, 898–912. [Google Scholar] [CrossRef]
- Vedel, H.; Huang, X.Y. Impact of ground based GPS data on numerical weather prediction. J. Meteorol. Soc. Jpn. 2003, 82, 459–472. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Han, S.; Bian, H.; Liu, X.; Sun, D.; Zhao, C. Characteristics of Three-Dimensional GPS tomography water vapor field during the rainstorm. Acta Sci. Nat. Univ. Pekin. 2014, 50, 1053–1064. [Google Scholar]
- Flores, A.; Rius, A.; Ruffini, G. 4D tropospheric tomography using GPS slant wet delays. Ann. Geophys. 2000, 18, 223–224. [Google Scholar] [CrossRef]
- Hirahara, K. Local GPS tropospheric tomography. Earth Planets Space 2000, 52, 935–939. [Google Scholar] [CrossRef] [Green Version]
- MacDonald, A.; Xie, Y.; Ware, R. Diagnosis of three dimensional water vapor using slant observations from a GPS network. Bull. Am. Meteorol. Soc. 2002, 130, 386–397. [Google Scholar]
- Braun, J.; Rocken, C. Water Vapor Tomography within the Planetary Boundary Layer Using GPS. Available online: https://www.researchgate.net/publication/228573377_Water_vapor_tomography_within_the_planetary_boundary_layer_using_GPS (accessed on 12 January 2020).
- Benevides, P.; Nico, G.; Catalao, J.; Miranda, P. Analysis of Galileo and GPS integration for GNSS tomography. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1936–1943. [Google Scholar] [CrossRef]
- Yao, Y.; Zhao, Q. Maximally Using GPS Observation for Water Vapor Tomography. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7185–7196. [Google Scholar] [CrossRef]
- Heublein, M.; Bradley, P.E.; Hinz, S. Observing geometry effects on a Global Navigation Satellite System (GNSS)-based water vapor tomography solved by least squares and by compressive sensing. Ann. Geophys. 2020, 38, 179–189. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.Y.; Dai, W.J.; Xia, P.F.; Ao, M.S.; Tan, J.S. Reconstruction of wet refractivity field using an improved parameterized tropospheric tomographic technique. Remote Sens. 2020, 12, 3034. [Google Scholar] [CrossRef]
- Zhang, W.; Lou, Y.; Liu, W.; Huang, J.; Wang, Z.; Zhou, Y.; Zhang, H. Rapid troposphere tomography using adaptive simultaneous iterative reconstruction technique. J. Geod. 2020, 94, 76. [Google Scholar] [CrossRef]
- Sa, A.; Rohm, W.; Fernandes, R.M.; Trzcina, E.; Bos, M.; Bento, F. Approach to leveraging real-time GNSS tomography usage. J. Geod. 2021, 95, 8. [Google Scholar] [CrossRef]
- Zhao, Q.; Li, Z.; Yao, W.; Yao, Y. An improved ridge estimation (IRE) method for troposphere water vapor tomography. J. Atmos. Sol. Terr. Phys. 2020, 207, 105366. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y.; Pan, L.; Zhu, J. Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Dong, Z.; Jin, S. 3-DWater Vapor Tomography in Wuhan from GPS, BDS and GLONASS Observations. Remote Sens. 2018, 10, 62. [Google Scholar] [CrossRef] [Green Version]
- Ding, N. Study on the Key Technologies in Ground-Based GNSS Tomography. Ph.D. Thesis, China University of Mining and Technology, Xuzhou, China, 20 December 2018. [Google Scholar]
- Whitted, T. An improved illumination model for shaded display. Commun. ACM 1980, 23, 343–349. [Google Scholar] [CrossRef]
- Weghorst, H.; Hooper, G.; Greenberg, D.P. Improved computational methods for ray tracing. ACM Trans. Graph. 1984, 3, 52–69. [Google Scholar] [CrossRef]
- Kay, T.L.; Kajiya, J.T. Ray tracing complex scenes. Comput. Graph. 1986, 20, 269–278. [Google Scholar] [CrossRef]
- Fujimoto, A.; Tanaka, T.; Iwata, K. ARTS: Accelerated ray-tracing system. IEEE Comput. Graph. Appl. 1986, 6, 16–26. [Google Scholar] [CrossRef]
- Amanatides, J.; Woo, A. A fast voxel traversal algorithm for ray tracing. Eurographics 1987, 87, 3–10. [Google Scholar]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Thayer, D. An improved equation for the radio refractive index of air. Radio Sci. 1974, 9, 803–807. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to theory of atmospheric refraction. J. Geod. 1972, 105, 279–298. [Google Scholar] [CrossRef]
- Liu, M.; Guo, P.; Ye, Q.; Zhang, J.; Zhu, X. The 3D tomography technique and application of water vapor using ground-based GPS networks in Shanghai. Acta Astron. Sin. 2010, 51, 299–308. [Google Scholar]
- Herring, T.A.; King, R.W.; Floyd, M.A.; McClusky, S.C. GAMIT (Version 10.7). 2018. Available online: http://www-gpsg.mit.edu/ (accessed on 12 January 2020).
- Herring, T.A. Modeling atmospheric delays in the analysis of space geodetic data. In Proceedirws of Refraction of Transatmospheric Simals in Geodesy; Netherlands Geodetic Commission: Delft, The Netherlands, 1992; pp. 157–164. [Google Scholar]
- Niell, A.E. Global mapping functions for the atmosphere delay at radio wavelengths. J. Geophys. Res. 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
- Altuntac, E. Variational Regularization Strategy for Atmospheric Tomography. Ph.D. Thesis, Institute for Numerical and Applied Mathematics, University of Goettingen, Göttingen, Germany, 2016. [Google Scholar]
- Altuntac, E. Three Dimensional Atmospheric Tomography Toy Model-II. MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/70614-three-dimensional-atmospheric-tomography-toy-model-ii (accessed on 20 July 2019).
- Klyuzhin, I. Fast Raytracing through a 3D Grid. MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/56527-fast-raytracing-through-a-3d-grid (accessed on 30 July 2019).
- Goff, J.A.; Gratch, S. Low-pressure properties of water-from 160 to 212 F. In Transactions of the American Society of Heating and Ventilating Engineers; New York, NY, USA, 1946; pp. 125–164. [Google Scholar]
- MatlabR2018a. MathWorks: Massachusetts, USA, March 2018. Available online: https://www.mathworks.com/products/matlab.html (accessed on 20 July 2019).
- Mao, H. Statistic research on remote sensing of atmospheric water vapor along slant path using global positioning system in Shenzhen. Environ. Sci. Manag. 2020, 45, 177–180. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Latitude | Longitude | Altitude (km) | Receiver | Antenna |
|---|---|---|---|---|---|
| szcz | 38.21°N | 116.51°E | 0.008 | TRIMBLE NETR9 | TRM57971.00 |
| szag | 38.42°N | 115.33°E | 0.036 | TRIMBLE NETR9 | TRM55971.00 |
| szhj | 38.42°N | 116.06°E | 0.015 | TRIMBLE NETR9 | TRM57971.00 |
| szbd | 38.44°N | 115.29°E | 0.017 | TRIMBLE NETR9 | TRM57971.00 |
| szwe | 38.85°N | 116.46°E | 0.008 | TRIMBLE NETR9 | TRM57971.00 |
| szme | 38.93°N | 115.31°E | 0.05 | TRIMBLE NETR9 | TRM57971.00 |
| szax | 38.94°N | 115.89°E | 0.013 | TRIMBLE NETR9 | TRM57971.00 |
| szlf | 39.29°N | 116.42°E | 0.014 | TRIMBLE NETR9 | TRM57971.00 |
| szyq | 39.3 °N | 116.48°E | 0.016 | TRIMBLE NETR9 | TRM57971.00 |
| szyx | 39.34°N | 115.52°E | 0.056 | TRIMBLE NETR9 | TRM55971.00 |
| szzz | 39.47°N | 116.03°E | 0.036 | TRIMBLE NETR9 | TRM57971.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, H.; Liu, M.; Zhong, J.; Deng, X.; Cao, Y.; Fang, P. A Case Study of the 3D Water Vapor Tomography Model Based on a Fast Voxel Traversal Algorithm for Ray Tracing. Remote Sens. 2021, 13, 2422. https://doi.org/10.3390/rs13122422
Hu H, Liu M, Zhong J, Deng X, Cao Y, Fang P. A Case Study of the 3D Water Vapor Tomography Model Based on a Fast Voxel Traversal Algorithm for Ray Tracing. Remote Sensing. 2021; 13(12):2422. https://doi.org/10.3390/rs13122422
Chicago/Turabian StyleHu, Heng, Min Liu, Jiqin Zhong, Xin Deng, Yunchang Cao, and Peng Fang. 2021. "A Case Study of the 3D Water Vapor Tomography Model Based on a Fast Voxel Traversal Algorithm for Ray Tracing" Remote Sensing 13, no. 12: 2422. https://doi.org/10.3390/rs13122422
APA StyleHu, H., Liu, M., Zhong, J., Deng, X., Cao, Y., & Fang, P. (2021). A Case Study of the 3D Water Vapor Tomography Model Based on a Fast Voxel Traversal Algorithm for Ray Tracing. Remote Sensing, 13(12), 2422. https://doi.org/10.3390/rs13122422