
Cloud-Top Height Comparison from Multi-Satellite Sensors and Ground-Based Cloud Radar over SACOL Site


Abstract
:1. Introduction
2. Data and Methods
2.1. Data
2.2. Cloud Layer Category
2.3. Time-Space Matching Procedure
3. Results
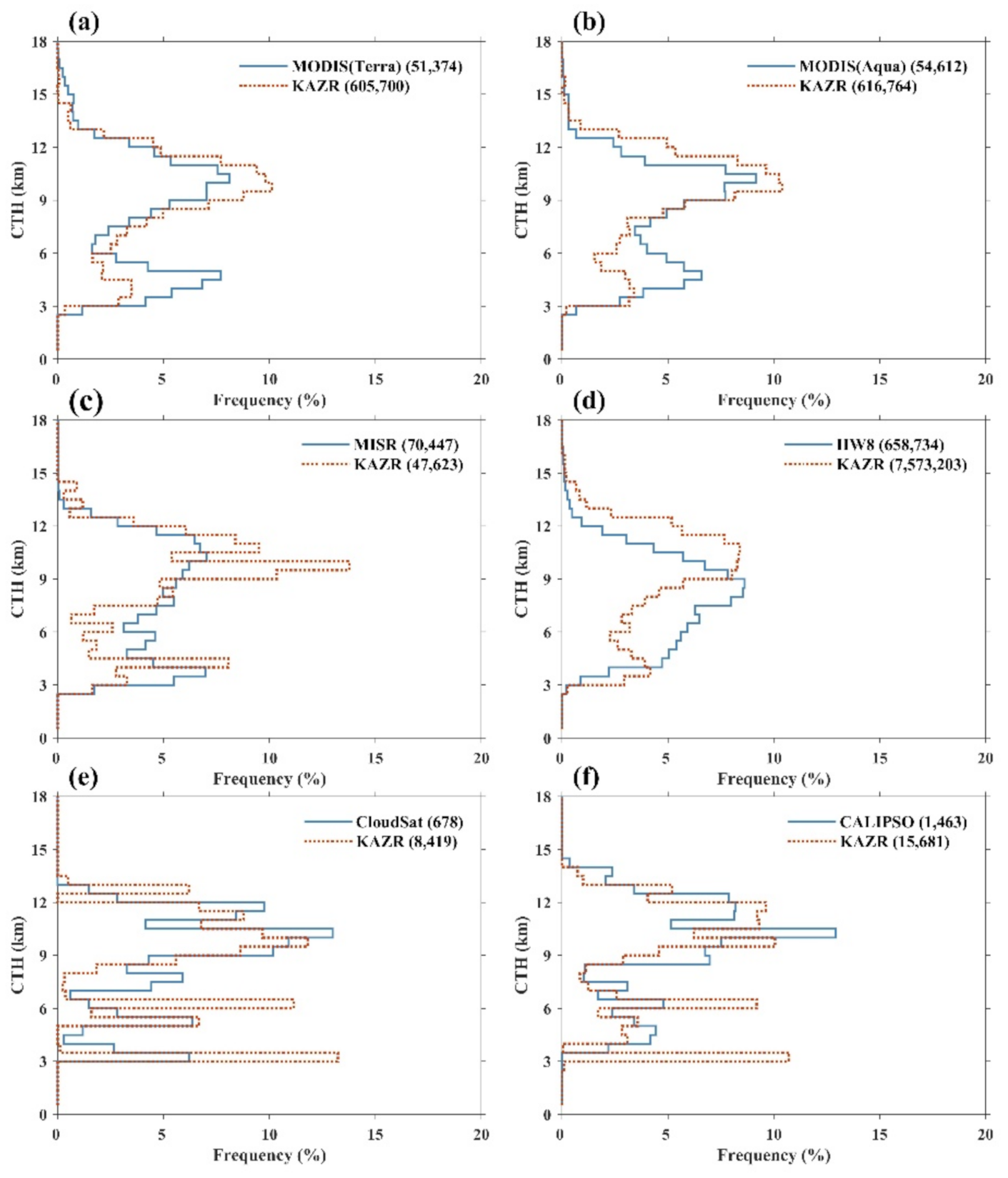
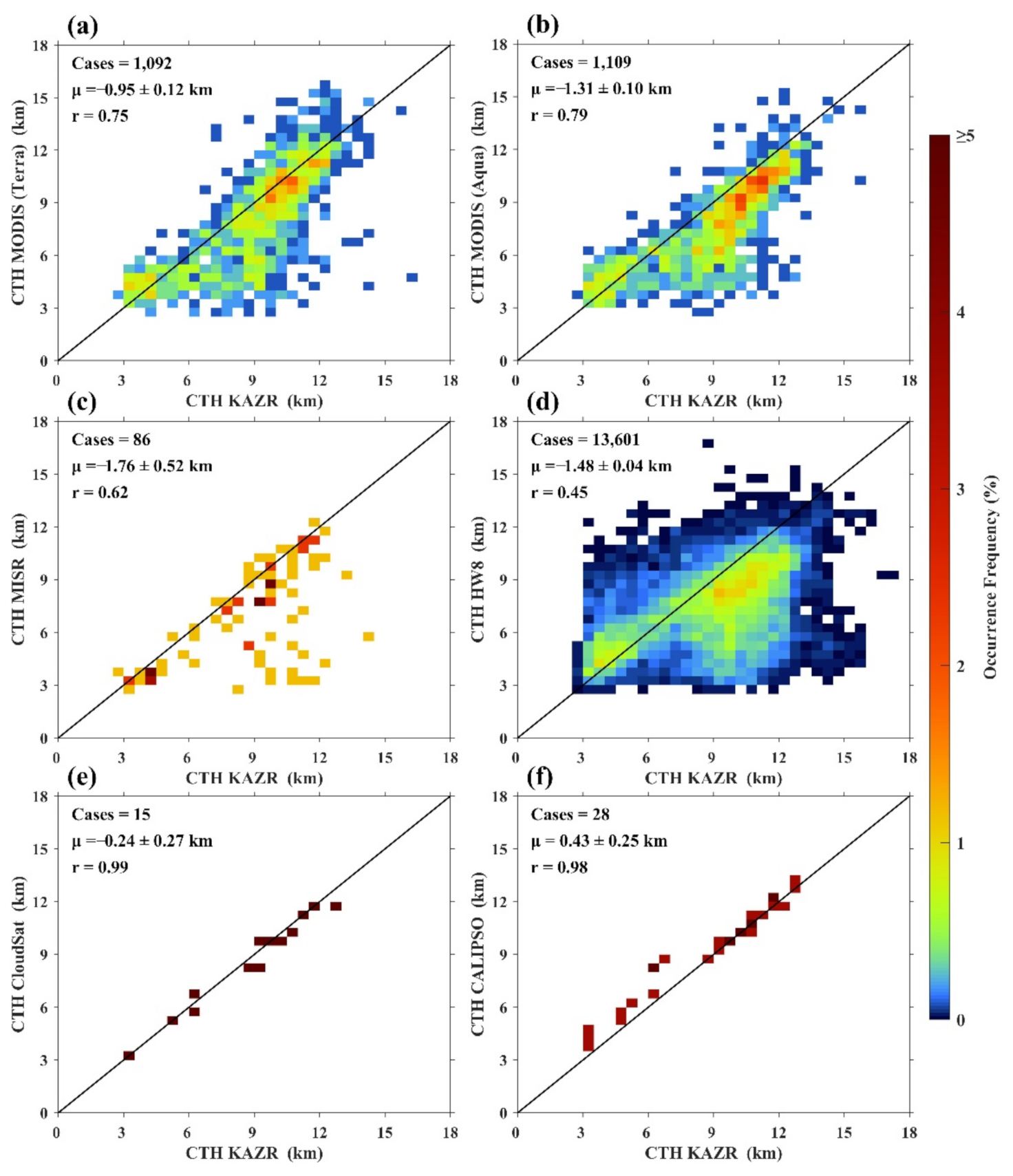
3.1. Comparison for Non-Overlapping Clouds
3.2. Comparison for Overlapping Clouds
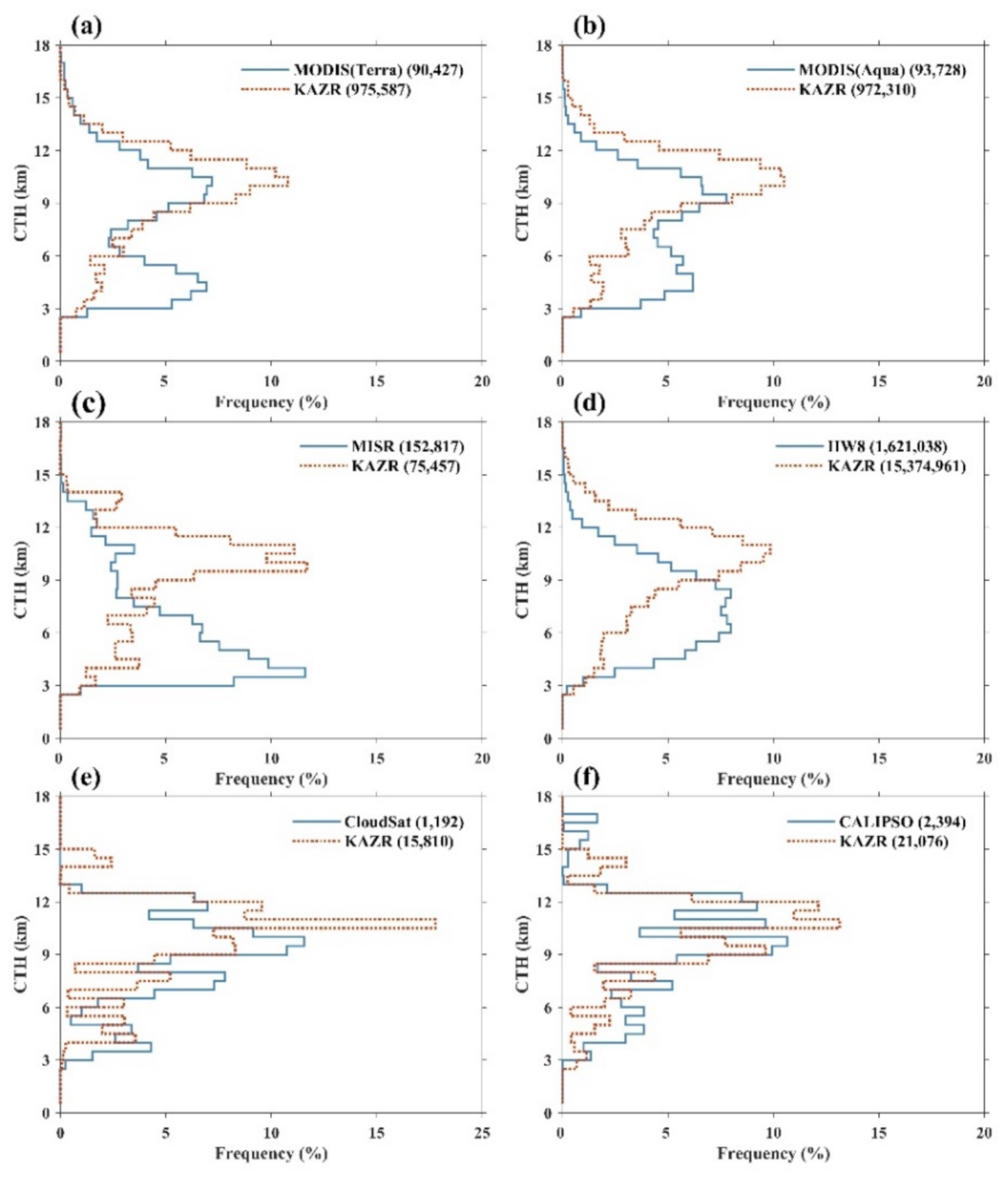
3.3. Comparison for All Clouds
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- King, M.; Platnick, S.; Menzel, W.P.; Ackerman, S.; Hubanks, P.A. Spatial and Temporal Distribution of Clouds Observed by MODIS Onboard the Terra and Aqua Satellites. IEEE Trans. Geosci. Remote. Sens. 2013, 51, 3826–3852. [Google Scholar] [CrossRef]
- Oreopoulos, L.; Norris, P.M. An analysis of cloud overlap at a midlatitude atmospheric observation facility. Atmos. Chem. Phys. Discuss. 2011, 11, 5557–5567. [Google Scholar] [CrossRef] [Green Version]
- Weisz, E.; Li, J.; Menzel, W.P.; Heidinger, A.K.; Kahn, B.H.; Liu, C.-Y. Comparison of AIRS, MODIS, CloudSat and CALIPSO cloud top height retrievals. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Wall, C.J.; Hartmann, D.L.; Thieman, M.M.; Smith, W.L.; Minnis, P. The Life Cycle of Anvil Clouds and the Top-of-Atmosphere Radiation Balance over the Tropical West Pacific. J. Clim. 2018, 31, 10059–10080. [Google Scholar] [CrossRef] [PubMed]
- Fu, Q.; Smith, M.; Yang, Q. The Impact of Cloud Radiative Effects on the Tropical Tropopause Layer Temperatures. Atmosphere 2018, 9, 377. [Google Scholar] [CrossRef] [Green Version]
- Garay, M.J.; De Szoeke, S.P.; Moroney, C.M. Comparison of marine stratocumulus cloud top heights in the southeastern Pacific retrieved from satellites with coincident ship-based observations. J. Geophys. Res. Space Phys. 2008, 113, 113. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.-W.; Chung, E.-S.; Yoon, S.-C.; Sohn, B.-J.; Sugimoto, N. Intercomparisons of cloud-top and cloud-base heights from ground-based Lidar, CloudSat and CALIPSO measurements. Int. J. Remote. Sens. 2011, 32, 1179–1197. [Google Scholar] [CrossRef]
- Wang, W.; Huang, J.; Minnis, P.; Hu, Y.; Li, J.; Huang, Z.; Ayers, J.K.; Wang, T. Dusty cloud properties and radiative forcing over dust source and downwind regions derived from A-Train data during the Pacific Dust Experiment. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhang, Y.; Li, B.; Li, L.; Feng, J.; Jia, S.; Lv, S.; Tao, F.; Guo, J. Cloud-base and cloud-top heights determined from a ground-based cloud radar in Beijing, China. Atmos. Environ. 2019, 201, 381–390. [Google Scholar] [CrossRef]
- Mühlbauer, A.; Ackerman, T.P.; Lawson, R.P.; Xie, S.; Zhang, Y. Evaluation of cloud-resolving model simulations of midlatitude cirrus with ARM and A-train observations. J. Geophys. Res. Atmos. 2015, 120, 6597–6618. [Google Scholar] [CrossRef]
- Wood, R. Stratocumulus Clouds. Mon. Weather. Rev. 2012, 140, 2373–2423. [Google Scholar] [CrossRef]
- Wild, M. New Directions: A facelift for the picture of the global energy balance. Atmos. Environ. 2012, 55, 366–367. [Google Scholar] [CrossRef]
- Fu, Q.; Liou, K.N. Parameterization of the Radiative Properties of Cirrus Clouds. J. Atmos. Sci. 1993, 50, 2008–2025. [Google Scholar] [CrossRef] [Green Version]
- Fu, Q.; Thorsen, T.; Su, J.; Ge, J.; Huang, J. Test of Mie-based single-scattering properties of non-spherical dust aerosols in radiative flux calculations. J. Quant. Spectrosc. Radiat. Transf. 2009, 110, 1640–1653. [Google Scholar] [CrossRef]
- Stephens, G.L.; Tsay, S.-C.; Stackhouse, P.W.; Flatau, P.J. The Relevance of the Microphysical and Radiative Properties of Cirrus Clouds to Climate and Climatic Feedback. J. Atmos. Sci. 1990, 47, 1742–1754. [Google Scholar] [CrossRef]
- Kotlarski, S.; Keuler, K.; Christensen, O.B.; Colette, A.; Deque, M.; Gobiet, A.; Goergen, K.; Jacob, D.J.; Lüthi, D.; Van Meijgaard, E.; et al. Regional climate modeling on European scales: A joint standard evaluation of the EURO-CORDEX RCM ensemble. Geosci. Model Dev. 2014, 7, 1297–1333. [Google Scholar] [CrossRef] [Green Version]
- Liou, K.N. Influence of cirrus clouds on weather and climate processes—A global perspective. Mon. Weather Rev. 1986, 114, 1167–1199. [Google Scholar] [CrossRef]
- Chung, C.-Y.; Francis, P.N.; Saunders, R.W.; Kim, J. Comparison of SEVIRI-Derived Cloud Occurrence Frequency and Cloud-Top Height with A-Train Data. Remote. Sens. 2016, 9, 24. [Google Scholar] [CrossRef] [Green Version]
- Tan, Z.; Ma, S.; Zhao, X.; Yan, W.; Lu, W. Evaluation of Cloud Top Height Retrievals from China’s Next-Generation Geostationary Meteorological Satellite FY-4A. J. Meteorol. Res. 2019, 33, 553–562. [Google Scholar] [CrossRef]
- Zheng, Y.; Rosenfeld, D.; Li, Z. The Relationships Between Cloud Top Radiative Cooling Rates, Surface Latent Heat Fluxes, and Cloud-Base Heights in Marine Stratocumulus. J. Geophys. Res. Atmos. 2018, 123, 11,678–11,690. [Google Scholar] [CrossRef]
- Chen, Y.; Fu, Y. Tropical echo-top height for precipitating clouds observed by multiple active instruments aboard satellites. Atmos. Res. 2018, 199, 54–61. [Google Scholar] [CrossRef]
- Huo, J.; Lu, D.; Duan, S.; Bi, Y.; Liu, B. Comparison of the cloud top heights retrieved from MODIS and AHI satellite data with ground-based Ka-band radar. Atmos. Meas. Tech. 2020, 13, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Håkansson, N.; Adok, C.; Thoss, A.; Scheirer, R.; Hörnquist, S. Neural network cloud top pressure and height for MODIS. Atmos. Meas. Tech. 2018, 11, 3177–3196. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Zhang, G.J. Improving the Simulation of Tropical Convective Cloud-Top Heights in CAM5 with CloudSat Observations. J. Clim. 2018, 31, 5189–5204. [Google Scholar] [CrossRef]
- Huang, J.; Guan, X.; Ji, F. Enhanced cold-season warming in semi-arid regions. Atmos. Chem. Phys. Discuss. 2012, 12, 5391–5398. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Zhang, W.; Zuo, J.; Bi, J.; Shi, J.; Wang, X.; Chang, Z.; Huang, Z.; Yang, S.; Zhang, B.; et al. An overview of the Semi-arid Climate and Environment Research Observatory over the Loess Plateau. Adv. Atmos. Sci. 2008, 25, 906–921. [Google Scholar] [CrossRef]
- Guan, X.; Huang, J.; Zhang, Y.; Xie, Y.; Liu, J. The relationship between anthropogenic dust and population over global semi-arid regions. Atmos. Chem. Phys. Discuss. 2016, 16, 5159–5169. [Google Scholar] [CrossRef] [Green Version]
- Ge, J.; Hu, X.; Fu, Q.; Xin, Y.; Su, J.; Li, X. Retrieval of ice cloud microphysical properties at the SACOL. Chin. Sci. Bull. 2019, 64, 2728–2740. [Google Scholar] [CrossRef]
- Ge, J.; Wang, Z.; Liu, Y.; Su, J.; Wang, C.; Dong, Z. Linkages between mid-latitude cirrus cloud properties and large-scale meteorology at the SACOL site. Clim. Dyn. 2019, 53, 5035–5046. [Google Scholar] [CrossRef]
- Ge, J.; Zheng, C.; Xie, H.; Xin, Y.; Huang, J.; Fu, Q. Midlatitude Cirrus Clouds at the SACOL Site: Macrophysical Properties and Large-Scale Atmospheric States. J. Geophys. Res. Atmos. 2018, 123, 2256–2271. [Google Scholar] [CrossRef]
- Hu, X.; Ge, J.; Du, J.; Li, Q.; Huang, J.; Fu, Q. A robust low-level cloud and clutter discrimination method for ground-based millimeter-wavelength cloud radar. Atmos. Meas. Tech. 2021, 14, 1743–1759. [Google Scholar] [CrossRef]
- Ge, J.; Zhu, Z.; Zheng, C.; Xie, H.; Zhou, T.; Huang, J.; Fu, Q. An improved hydrometeor detection method for millimeter-wavelength cloud radar. Atmos. Chem. Phys. Discuss. 2017, 17, 9035–9047. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Zheng, C.; Ge, J.; Huang, J.; Fu, Q. Cloud macrophysical properties from KAZR at the SACOL. Chin. Sci. Bull. 2017, 62, 824–835. [Google Scholar] [CrossRef]
- Platnick, S.; King, M.; Ackerman, S.; Menzel, W.P.; Baum, B.; Riedi, J.; Frey, R. The MODIS cloud products: Algorithms and examples from terra. IEEE Trans. Geosci. Remote. Sens. 2003, 41, 459–473. [Google Scholar] [CrossRef] [Green Version]
- Mitra, A.; Di Girolamo, L.; Hong, Y.; Zhan, Y.; Mueller, K.J. Assessment and Error Analysis of Terra-MODIS and MISR Cloud-Top Heights Through Comparison With ISS-CATS Lidar. J. Geophys. Res. Atmos. 2021, 126. [Google Scholar] [CrossRef]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An Introduction to Himawari-8/9—Japan’s New-Generation Geostationary Meteorological Satellites. J. Meteorol. Soc. Jpn. 2016, 94, 151–183. [Google Scholar] [CrossRef] [Green Version]
- Letu, H.; Nagao, T.M.; Nakajima, T.Y.; Riedi, J.; Ishimoto, H.; Baran, A.J.; Shang, H.; Sekiguchi, M.; Kikuchi, M. Ice Cloud Properties From Himawari-8/AHI Next-Generation Geostationary Satellite: Capability of the AHI to Monitor the DC Cloud Generation Process. IEEE Trans. Geosci. Remote. Sens. 2018, 57, 3229–3239. [Google Scholar] [CrossRef]
- Khatri, P.; Hayasaka, T.; Iwabuchi, H.; Takamura, T.; Irie, H.; Nakajima, T.Y. Validation of MODIS and AHI Observed Water Cloud Properties Using Surface Radiation Data. J. Meteorol. Soc. Jpn. 2018, 96B, 151–172. [Google Scholar] [CrossRef] [Green Version]
- Genkova, I.; Seiz, G.; Zuidema, P.; Zhao, G.; Di Girolamo, L. Cloud top height comparisons from ASTER, MISR, and MODIS for trade wind cumuli. Remote. Sens. Environ. 2007, 107, 211–222. [Google Scholar] [CrossRef]
- Marchand, R.T.; Ackerman, T.P.; Moroney, C. An assessment of Multiangle Imaging Spectroradiometer (MISR) stereo-derived cloud top heights and cloud top winds using ground-based radar, lidar, and microwave radiometers. J. Geophys. Res. Space Phys. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Ge, J.; Li, Y.; Marchand, R.; Huang, J.; Fu, Q. Improved Hydrometeor Detection Method: An Application to CloudSat. Earth Space Sci. 2020, 7. [Google Scholar] [CrossRef]
- Oreopoulos, L.; Cho, N.; Lee, D. New insights about cloud vertical structure from CloudSat and CALIPSO observations. J. Geophys. Res. Atmos. 2017, 122, 9280–9300. [Google Scholar] [CrossRef] [PubMed]
- Hong, Y.; Di Girolamo, L. Cloud phase characteristics over Southeast Asia from A-Train satellite observations. Atmos. Chem. Phys. Discuss. 2020, 20, 8267–8291. [Google Scholar] [CrossRef]
- Kahn, B.H.; Chahine, M.T.; Stephens, G.L.; Mace, G.G.; Marchand, R.T.; Wang, Z.; Barnet, C.D.; Eldering, A.; Holz, R.E.; Kuehn, R.E.; et al. Cloud type comparisons of AIRS, CloudSat, and CALIPSO cloud height and amount. Atmos. Chem. Phys. Discuss. 2008, 8, 1231–1248. [Google Scholar] [CrossRef] [Green Version]
- Hillman, B.R.; Marchand, R.T.; Ackerman, T.P.; Mace, G.G.; Benson, S. Assessing the accuracy of MISR and MISR-simulated cloud top heights using CloudSat- and CALIPSO-retrieved hydrometeor profiles. J. Geophys. Res. Atmos. 2017, 122, 2878–2897. [Google Scholar] [CrossRef]
- Marchand, R.; Ackerman, T.; Smyth, M.; Rossow, W.B. A review of cloud top height and optical depth histograms from MISR, ISCCP, and MODIS. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef]
- Kollias, P.; Bharadwaj, N.; Clothiaux, E.E.; Lamer, K.; Oue, M.; Hardin, J.; Isom, B.; Lindenmaier, I.; Matthews, A.; Luke, E.; et al. The ARM Radar Network: At the Leading Edge of Cloud and Precipitation Observations. Bull. Am. Meteorol. Soc. 2020, 101, E588–E607. [Google Scholar] [CrossRef] [Green Version]
- Naud, C.; Baum, B.; Pavolonis, M.; Heidinger, A.; Frey, R.; Zhang, H. Comparison of MISR and MODIS cloud-top heights in the presence of cloud overlap. Remote. Sens. Environ. 2007, 107, 200–210. [Google Scholar] [CrossRef]
- Naud, C.M.; Muller, J.-P.; Clothiaux, E.E.; Baum, B.A.; Menzel, W.P. Intercomparison of multiple years of MODIS, MISR and radar cloud-top heights. Ann. Geophys. 2005, 23, 2415–2424. [Google Scholar] [CrossRef] [Green Version]
- Naud, C.; Muller, J.; Haeffelin, M.; Morille, Y.; Delaval, A. Assessment of MISR and MODIS cloud top heights through inter-comparison with a back-scattering lidar at SIRTA. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Chiu, C.; Lin, P.; Min, M. Comparison of Cloud-Top Property Retrievals From Advanced Himawari Imager, MODIS, CloudSat/CPR, CALIPSO/CALIOP, and Radiosonde. J. Geophys. Res. Atmos. 2020, 125. [Google Scholar] [CrossRef]
- Hagihara, Y.; Okamoto, H.; Luo, Z.J. Joint analysis of cloud top heights from CloudSat and CALIPSO: New insights into cloud top microphysics. J. Geophys. Res. Atmos. 2014, 119, 4087–4106. [Google Scholar] [CrossRef]
- Platnick, S.; Ackerman, S.; King, M. MODIS Atmosphere L2 Cloud Product (06_L2). In NASA MODIS Adaptive Processing System, Goddard Space Flight Center, USA; NASA: Washington, DC, USA, 2015. [Google Scholar]
- Diner, D.; Beckert, J.; Reilly, T.; Bruegge, C.; Conel, J.; Kahn, R.; Martonchik, J.; Ackerman, T.; Davies, R.; Gerstl, S.; et al. Multi-angle Imaging SpectroRadiometer (MISR) instrument description and experiment overview. IEEE Trans. Geosci. Remote. Sens. 1998, 36, 1072–1087. [Google Scholar] [CrossRef]
- Nakajima, T.Y.; Ishida, H.; Nagao, T.M.; Hori, M.; Letu, H.; Higuchi, R.; Tamaru, N.; Imoto, N.; Yamazaki, A. Theoretical basis of the algorithms and early phase results of the GCOM-C (Shikisai) SGLI cloud products. Prog. Earth Planet. Sci. 2019, 6, 52. [Google Scholar] [CrossRef]
- Nakajima, T.Y.; Nakajma, T. Wide-Area Determination of Cloud Microphysical Properties from NOAA AVHRR Measurements for FIRE and ASTEX Regions. J. Atmos. Sci. 1995, 52, 4043–4059. [Google Scholar] [CrossRef] [Green Version]
- Stephens, G.L.; Vane, D.G.; Boain, R.J.; Mace, G.G.; Sassen, K.; Wang, Z.; Illingworth, A.J.; O’Connor, E.J.; Rossow, W.B.; Durden, S.L.; et al. THE CLOUDSAT MISSION AND THE A-TRAIN—A new dimension of space-based observations of clouds and pre-cipitation. Bull. Am. Meteorol. Soc. 2002, 83, 1771–1790. [Google Scholar] [CrossRef] [Green Version]
- Winker, D.M.; Vaughan, M.A.; Omar, A.; Hu, Y.; Powell, K.A.; Liu, Z.; Hunt, W.H.; Young, S.A. Overview of the CALIPSO Mission and CALIOP Data Processing Algorithms. J. Atmos. Ocean. Technol. 2009, 26, 2310–2323. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Li, Z.; Fan, X.; Peng, L.; Yu, Y.; Cribb, M. Analysis of cloud layer structure in Shouxian, China using RS92 radiosonde aided by 95 GHz cloud radar. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef]
- Hollars, S.; Fu, Q.; Comstock, J.; Ackerman, T. Comparison of cloud-top height retrievals from ground-based 35 GHz MMCR and GMS-5 satellite observations at ARM TWP Manus site. Atmos. Res. 2004, 72, 169–186. [Google Scholar] [CrossRef]
- Xi, B.; Dong, X.; Minnis, P.; Khaiyer, M.M. A 10 year climatology of cloud fraction and vertical distribution derived from both surface and GOES observations over the DOE ARM SPG site. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Christensen, M.W.; Stephens, G.L.; Lebsock, M.D. Exposing biases in retrieved low cloud properties from CloudSat: A guide for evaluating observations and climate data. J. Geophys. Res. Atmos. 2013, 118, 120–131. [Google Scholar] [CrossRef]
- Miles, N.L.; Verlinde, J.; Clothiaux, E.E. Cloud Droplet Size Distributions in Low-Level Stratiform Clouds. J. Atmos. Sci. 2000, 57, 295–311. [Google Scholar] [CrossRef]
- Frey, R.A.; Ackerman, S.; Liu, Y.; Strabala, K.I.; Zhang, H.; Key, J.R.; Wang, X. Cloud Detection with MODIS. Part I: Improvements in the MODIS Cloud Mask for Collection. J. Atmos. Ocean. Technol. 2008, 25, 1057–1072. [Google Scholar] [CrossRef]
- Liu, B.; Huo, J.; Lyu, D.; Wang, X. Assessment of FY-4A and Himawari-8 Cloud Top Height Retrieval through Comparison with Ground-Based Millimeter Radar at Sites in Tibet and Beijing. Adv. Atmos. Sci. 2021, 1–17. [Google Scholar] [CrossRef]
- Hagihara, Y.; Okamoto, H.; Yoshida, R. Development of a combined CloudSat-CALIPSO cloud mask to show global cloud distribution. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Oreopoulos, L.; Cahalan, R. Cloud Inhomogeneity from MODIS. J. Clim. 2005, 18, 5110–5124. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Jian, B.; Zhao, C.; Zhao, Y.; Wang, J.; Huang, J. Atmospheric Instability Dominates the Long-Term Variation of Cloud Vertical Overlap Over the Southern Great Plains Site. J. Geophys. Res. Atmos. 2019, 124, 9691–9701. [Google Scholar] [CrossRef]
- Marchand, R. Trends in ISCCP, MISR, and MODIS cloud-top-height and optical-depth histograms. J. Geophys. Res. Atmos. 2013, 118, 1941–1949. [Google Scholar] [CrossRef]
- Prasad, A.A.; Davies, R. An assessment of cirrus heights from MISR oblique stereo using ground-based radar and lidar at the Tropical Western Pacific ARM sites. J. Geophys. Res. Atmos. 2013, 118, 5588–5599. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Platform | Instrument | Data Set | Version | Time Period | Reference |
|---|---|---|---|---|---|
| Terra | MODIS | MOD06_L2 | Collection 6.1 | 1 August 2013 to 31 December 2019 | [34,53] |
| Aqua | MODIS | MYD06_L2 | Collection 6.1 | 1 August 2013 to 31 December 2019 | [53] |
| Terra | MISR | MIL2TCSP | V001 | 1 August 2013 to 31 December 2019 | [54] |
| Himawari-8 | AHI | L2CLP010 | Version 1.0 | 4 July 2015 to 31 December 2019 | [55,56] |
| CloudSat | CPR | 2B-GEOPROF | P1_R05 | 1 August 2013 to 5 December 2017 | [57] |
| CALIPSO | CALIOP | CAL_LID_L2_VFM | V4-20 | 1 August 2013 to 31 December 2019 | [58] |
| SACOL | KAZR | KAZR11P_L1 | V2 | 1 August 2013 to 31 December 2019 | [29] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Ge, J.; Hu, X.; Wang, M.; Han, Z. Cloud-Top Height Comparison from Multi-Satellite Sensors and Ground-Based Cloud Radar over SACOL Site. Remote Sens. 2021, 13, 2715. https://doi.org/10.3390/rs13142715
Yang X, Ge J, Hu X, Wang M, Han Z. Cloud-Top Height Comparison from Multi-Satellite Sensors and Ground-Based Cloud Radar over SACOL Site. Remote Sensing. 2021; 13(14):2715. https://doi.org/10.3390/rs13142715
Chicago/Turabian StyleYang, Xuan, Jinming Ge, Xiaoyu Hu, Meihua Wang, and Zihang Han. 2021. "Cloud-Top Height Comparison from Multi-Satellite Sensors and Ground-Based Cloud Radar over SACOL Site" Remote Sensing 13, no. 14: 2715. https://doi.org/10.3390/rs13142715
APA StyleYang, X., Ge, J., Hu, X., Wang, M., & Han, Z. (2021). Cloud-Top Height Comparison from Multi-Satellite Sensors and Ground-Based Cloud Radar over SACOL Site. Remote Sensing, 13(14), 2715. https://doi.org/10.3390/rs13142715