
Monitoring the Transformation of Arctic Landscapes: Automated Shoreline Change Detection of Lakes Using Very High Resolution Imagery


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Areas and Data
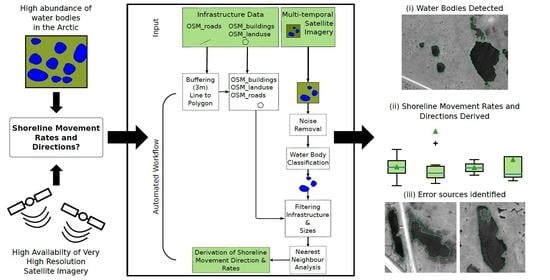
2.2. Automated Shoreline Change Detection Workflow
2.2.1. Noise Removal
2.2.2. Water Body Detection
2.2.3. Removal of Misclassifications and Infrastructural Elements
2.2.4. Calculation of Movement Rates
2.3. Quality Assessment
- 0.1–0.36 ha
- 0.36–1.44 ha
- 1.44–5.76 ha
- 5.76–23.04 ha
- >23.04 ha
3. Results
3.1. Evaluation of the Workflow
3.1.1. Code and Performance
3.1.2. Quality of Noise Removal
3.1.3. Accuracy of Water Body Detection and Filtering
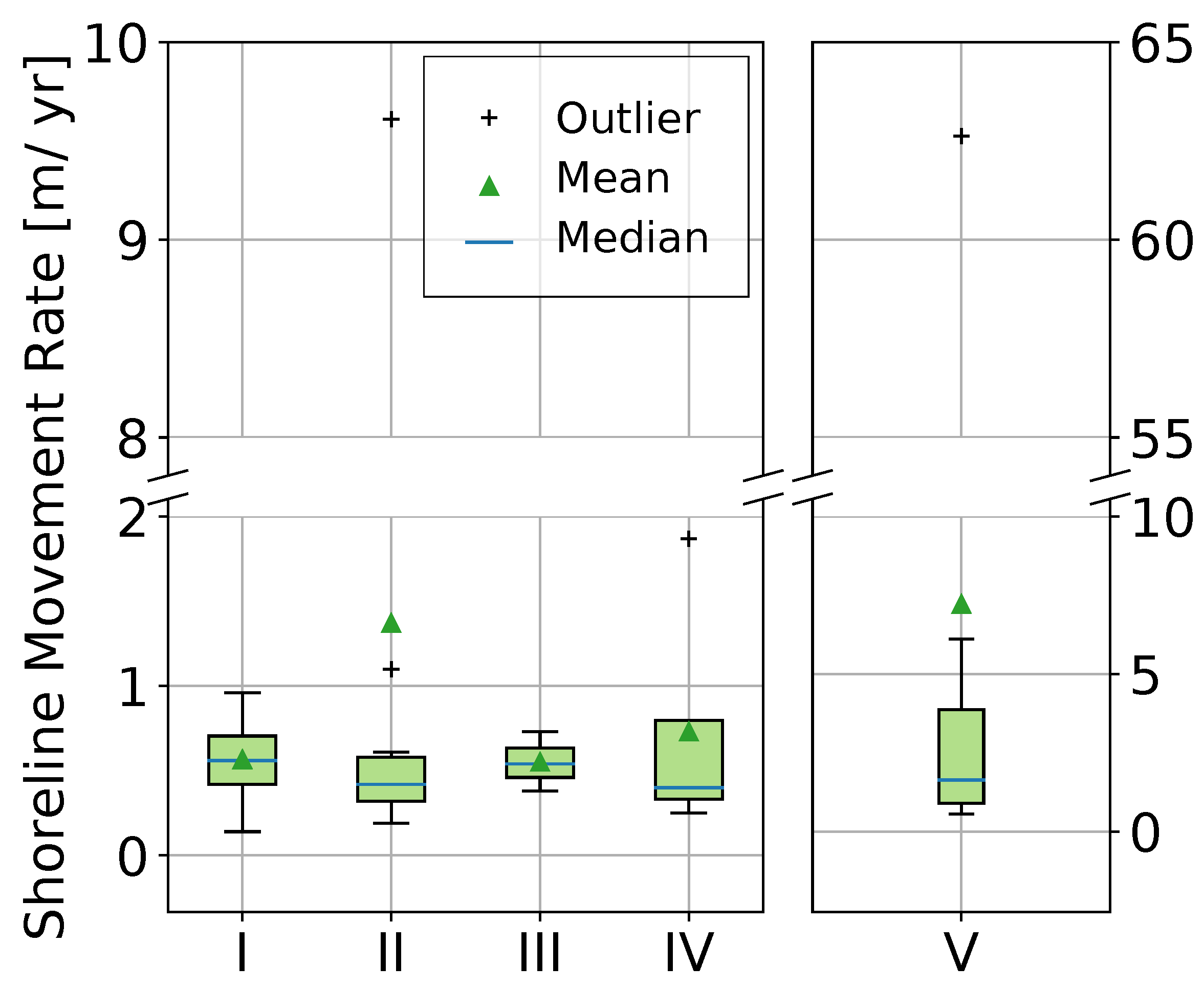
3.1.4. Deadhorse: Accuracy of Shoreline Movement Rates and Directions
3.1.5. MP 396: Water Body Detection
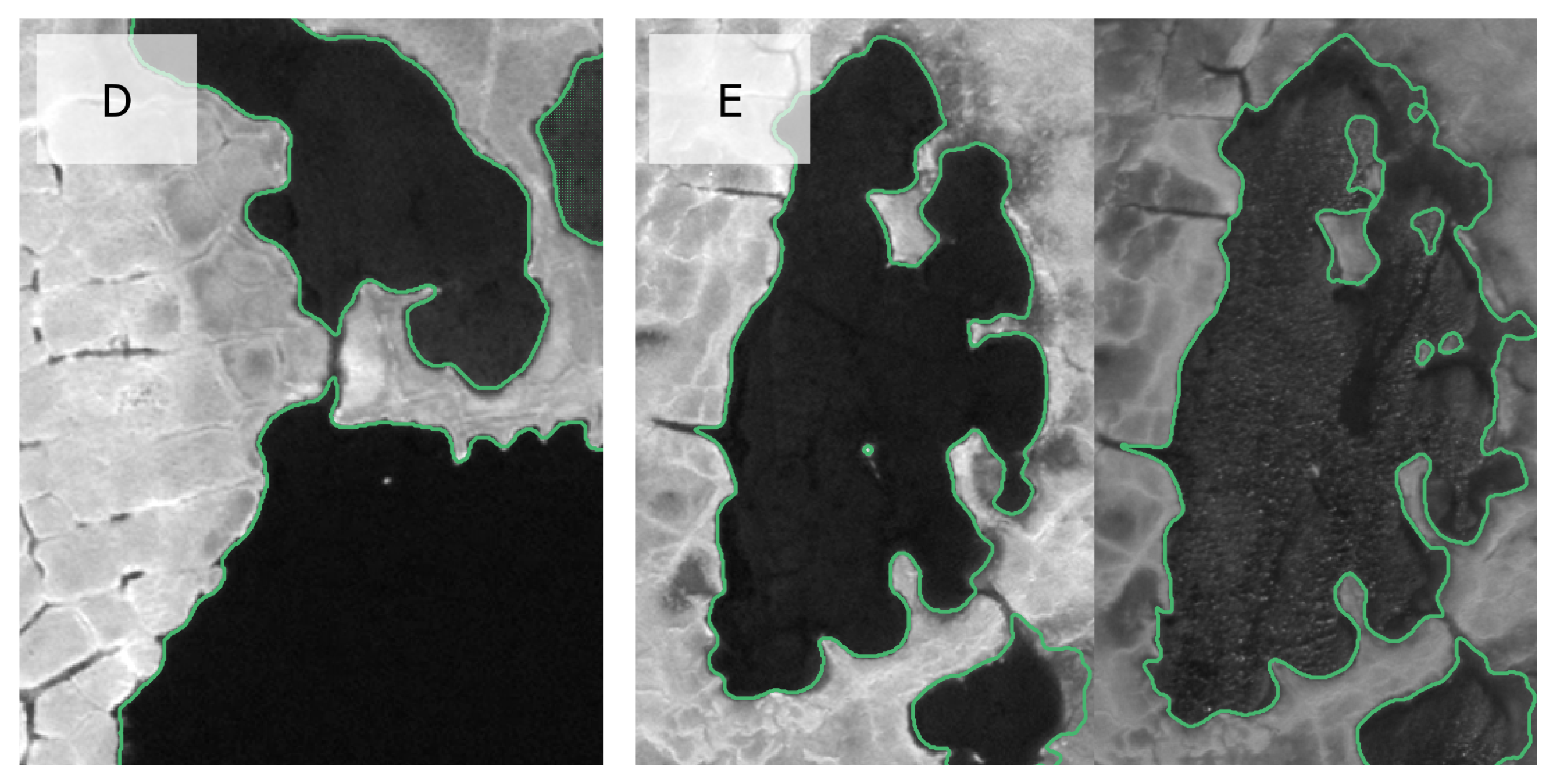
3.1.6. Identification of Error Sources
- i
- Distortion in the shore area due to sediment entry or shallow water depths results in an underestimation of the water surface area, and therefore the erroneous calculation of the lake shoreline movement rate, when the water surface area is fully identified in the next time step and vice versa (category: shore area);
- ii
- Speckle from sunglint leads to an underestimation of the water surface area. (category: sunglint);
- iii
- Undetected connections between adjacent lakes through water-filled patches, troughs of polygonal tundra or erosion and drainage gullies lead to the classification of several smaller lakes instead of one large lake (category: connectivity);
- iv
- Seasonal variations in water surface area. Depending on the amount of precipitation preceding the image acquisition, areas might appear as water bodies in one time step but as land in the next or vice versa. This can also lead to an overestimation of water surface area and therefore the incorrect derivation of shoreline geometry, when some moist patches are classified as (part of the) water bodies (category: water level).
4. Discussion
5. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| VHR | Very high resolution |
| MP | Mile post |
| pan | Panchromatic |
| LiDAR | Light detection and ranging |
| RGB | Red–green–blue |
| NIR | Near infrared |
| SWIR | Shortwave infrared |
| OSM | OpenStreetMap |
| yr | year |
Appendix A




References
- Grosse, G.; Jones, B.; Arp, C. Thermokarst Lakes, Drainage, and Drained Basins. In Treatise on Geomorphology; Shroder, J.F., Ed.; Academic Press: San Diego, CA, USA, 2013; pp. 325–353. [Google Scholar] [CrossRef]
- Muster, S.; Roth, K.; Langer, M.; Lange, S.; Cresto Aleina, F.; Bartsch, A.; Morgenstern, A.; Grosse, G.; Jones, B.; Sannel, A.B.K.; et al. PeRL: A circum-Arctic permafrost region pond and lake database. Earth Syst. Sci. Data 2017, 9, 317–348. [Google Scholar] [CrossRef] [Green Version]
- Rautio, M.; Dufresne, F.; Laurion, I.; Bonilla, S.; Vincent, W.F.; Christoffersen, K.S. Shallow freshwater ecosystems of the circumpolar Arctic. Ecoscience 2011, 18, 204–222. [Google Scholar] [CrossRef]
- Pienitz, R.; Doran, P.T.; Lamoureux, S.F. Origin and geomorphology of lakes in the polar regions. In Polar Lakes and Rivers: Limnology of Arctic and Antarctic Aquatic Ecosystems, 1st ed.; Vincent, W.F., Laybourn-Parry, J., Eds.; Oxford University Press: Oxford, UK, 2008; pp. 25–42. [Google Scholar]
- Brosius, L.; Anthony, K.W.; Treat, C.; Lenz, J.; Jones, M.; Bret-Harte, M.; Grosse, G. Spatiotemporal patterns of northern lake formation since the Last Glacial Maximum. Quat. Sci. Rev. 2021, 253, 106773. [Google Scholar] [CrossRef]
- Langer, M.; Westermann, S.; Boike, J.; Kirillin, G.; Grosse, G.; Peng, S.; Krinner, G. Rapid degradation of permafrost underneath waterbodies in tundra landscapes—Toward a representation of thermokarst in land surface models. J. Geophys. Res. Earth Surf. 2016, 121, 2446–2470. [Google Scholar] [CrossRef]
- Muster, S.; Riley, W.J.; Roth, K.; Langer, M.; Cresto Aleina, F.; Koven, C.D.; Lange, S.; Bartsch, A.; Grosse, G.; Wilson, C.J.; et al. Size distributions of Arctic waterbodies reveal consistent relations in their statistical moments in space and time. Front. Earth Sci. 2019, 7, 5. [Google Scholar] [CrossRef] [Green Version]
- Jorgenson, M.T.; Shur, Y. Evolution of lakes and basins in northern Alaska and discussion of the thaw lake cycle. J. Geophys. Res. Earth Surf. 2007, 112, 1–12. [Google Scholar] [CrossRef]
- Arp, C.D.; Jones, B.M. Geography of Alaska Lake Districts: Identification, Description, and Analysis of Lake-Rich Regions of a Diverse and Dynamic State; U.S. Geological Survey Scientific Investigations Report 2008-5215; US Geological Survey: Menlo Park, CA, USA, 2009; p. 40.
- Walter Anthony, K.; Daanen, R.; Anthony, P.; Schneider Von Deimling, T.; Ping, C.L.; Chanton, J.P.; Grosse, G. Methane emissions proportional to permafrost carbon thawed in Arctic lakes since the 1950s. Nat. Geosci. 2016, 9, 679–682. [Google Scholar] [CrossRef]
- In’t Zandt, M.H.; Liebner, S.; Welte, C.U. Roles of Thermokarst Lakes in a Warming World. Trends Microbiol. 2020, 28, 769–779. [Google Scholar] [CrossRef] [PubMed]
- Jones, B.M.; Grosse, G.; Arp, C.D.; Jones, M.C.; Walter Anthony, K.M.; Romanovsky, V.E. Modern thermokarst lake dynamics in the continuous permafrost zone, northern Seward Peninsula, Alaska. J. Geophys. Res. Biogeosci. 2011, 116, 1–13. [Google Scholar] [CrossRef]
- Carroll, M.L.; Townshend, J.R.G.; Dimiceli, C.M.; Loboda, T.; Sohlberg, R.A. Shrinking lakes of the Arctic: Spatial relationships and trajectory of change. Geophys. Res. Lett. 2011, 38, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Olthof, I.; Fraser, R.H.; Schmitt, C. Landsat-based mapping of thermokarst lake dynamics on the Tuktoyaktuk Coastal Plain, Northwest Territories, Canada since 1985. Remote Sens. Environ. 2015, 168, 194–204. [Google Scholar] [CrossRef]
- Smith, L.C.; Sheng, Y.; MacDonald, G.M.; Hinzman, L.D. Atmospheric Science: Disappearing Arctic lakes. Science 2005, 308, 1429. [Google Scholar] [CrossRef] [Green Version]
- Nitze, I.; Grosse, G.; Jones, B.M.; Arp, C.D.; Ulrich, M.; Fedorov, A.; Veremeeva, A. Landsat-based trend analysis of lake dynamics across Northern Permafrost Regions. Remote Sens. 2017, 9, 640. [Google Scholar] [CrossRef] [Green Version]
- Riordan, B.; Verbyla, D.; McGuire, A.D. Shrinking ponds in subarctic Alaska based on 1950–2002 remotely sensed images. J. Geophys. Res. Biogeosci. 2006, 111. [Google Scholar] [CrossRef]
- Arp, C.D.; Jones, B.M.; Urban, F.E.; Grosse, G. Hydrogeomorphic processes of thermokarst lakes with grounded-ice and floating-ice regimes on the Arctic coastal plain, Alaska. Hydrol. Process. 2011, 25, 2422–2438. [Google Scholar] [CrossRef]
- Sannel, A.B.K.; Brown, I.A. High-resolution remote sensing identification of thermokarst lake dynamics in a subarctic peat plateau complex. Can. J. Remote Sens. 2010, 36, S26–S40. [Google Scholar] [CrossRef]
- Farquharson, L.M.; Romanovsky, V.E.; Cable, W.L.; Walker, D.A.; Kokelj, S.V.; Nicolsky, D. Climate Change Drives Widespread and Rapid Thermokarst Development in Very Cold Permafrost in the Canadian High Arctic. Geophys. Res. Lett. 2019, 46, 6681–6689. [Google Scholar] [CrossRef] [Green Version]
- Liljedahl, A.K.; Boike, J.; Daanen, R.P.; Fedorov, A.N.; Frost, G.V.; Grosse, G.; Hinzman, L.D.; Iijma, Y.; Jorgenson, J.C.; Matveyeva, N.; et al. Pan-Arctic ice-wedge degradation in warming permafrost and its influence on tundra hydrology. Nat. Geosci. 2016, 9, 312–318. [Google Scholar] [CrossRef]
- Shah, C.A. Automated lake shoreline mapping at subpixel accuracy. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1125–1129. [Google Scholar] [CrossRef]
- Sheng, Y.; Shah, C.A.; Smith, L.C. Automated image registration for hydrologic change detection in the lake-rich arctic. IEEE Geosci. Remote Sens. Lett. 2008, 5, 414–418. [Google Scholar] [CrossRef]
- Bangira, T.; Alfieri, S.M.; Menenti, M.; van Niekerk, A. Comparing thresholding with machine learning classifiers for mapping complex water. Remote Sens. 2019, 11, 1351. [Google Scholar] [CrossRef] [Green Version]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Tian, B.; Li, Z.; Zhang, M.; Huang, L.; Qiu, Y.; Li, Z.; Tang, P. Mapping Thermokarst Lakes on the Qinghai-Tibet Plateau Using Nonlocal Active Contours in Chinese GaoFen-2 Multispectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1687–1700. [Google Scholar] [CrossRef]
- Cooley, S.W.; Smith, L.C.; Stepan, L.; Mascaro, J. Tracking Dynamic Northern Surface Water Changes with High-Frequency Planet CubeSat Imagery. Remote Sens. 2017, 9, 1306. [Google Scholar] [CrossRef] [Green Version]
- Cooley, S.W.; Smith, L.C.; Ryan, J.C.; Pitcher, L.H.; Pavelsky, T.M. Arctic-Boreal Lake Dynamics Revealed Using CubeSat Imagery. Geophys. Res. Lett. 2019, 46, 2111–2120. [Google Scholar] [CrossRef]
- Nitze, I.; Cooley, S.W.; Duguay, C.R.; Jones, B.M.; Grosse, G. The catastrophic thermokarst lake drainage events of 2018 in northwestern Alaska: Fast-forward into the future. Cryosphere 2020, 14, 4279–4297. [Google Scholar] [CrossRef]
- Brown, J.; Ferrians, O.J.; Heginbottom, J.A.; Melnikov, E.S. Circum-Arctic Map of Permafrost and Ground-Ice Conditions; Digital Media, National Snow and Ice Data Center: Boulder, CO, USA, 2001. [Google Scholar]
- NOAA National Centers for Environmental Information. 1981-2010 Normals | Data Tools | Climate Data Online (CDO) | National Climatic Data Center (NCDC). 2021. Available online: https://www.ncdc.noaa.gov/cdo-web/datatools/normals (accessed on 26 May 2021).
- Walker, D.; Raynolds, M.K. Circumpolar Arctic Vegetation, Geobotanical, Physiographic Maps, 1982–2003; ORNL DAAC: Oak Ridge, TN, USA, 2018. [Google Scholar] [CrossRef]
- Sellmann, P.V.; Brown, J.; Lewellen, R.I.; McKim, H.; Merry, C. The Classification and Geomorphic Implications of Thaw Lakes on the Arctic Coastal Plain, Alaska; Cold Regions Research and Engineering Laboratory: Hanover, NH, USA, 1975. [Google Scholar]
- Hinkel, K.M.; Frohn, R.C.; Nelson, F.E.; Eisner, W.R.; Beck, R.A. Morphometric and spatial analysis of thaw lakes and drained thaw lake basins in the western Arctic Coastal Plain, Alaska. Permafr. Periglac. Process. 2005, 16, 327–341. [Google Scholar] [CrossRef]
- Raynolds, M.K.; Walker, D.A.; Ambrosius, K.J.; Brown, J.; Everett, K.R.; Kanevskiy, M.; Kofinas, G.P.; Romanovsky, V.E.; Shur, Y.; Webber, P.J. Cumulative geoecological effects of 62 years of infrastructure and climate change in ice-rich permafrost landscapes, Prudhoe Bay Oilfield, Alaska. Glob. Chang. Biol. 2014, 20, 1211–1224. [Google Scholar] [CrossRef]
- OpenStreetMap Contributors and Geofabrik GmbH. Geofabrik Download Server. 2018. Available online: http://download.geofabrik.de/ (accessed on 15 July 2021).
- Garaba, S.P.; Schulz, J.; Wernand, M.R.; Zielinski, O. Sunglint detection for unmanned and automated platforms. Sensors 2012, 12, 12545–12561. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, J.; Li, J.; Zhang, D.D. Multi-Spectral Water Index (MuWI): A Native 10-m Multi-Spectral Water Index for Accurate Water Mapping on Sentinel-2. Remote Sens. 2018, 10, 1643. [Google Scholar] [CrossRef] [Green Version]
- van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T.; The Scikit-Image Contributors. Scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef]
- Lillesand, T.M.; Kiefer, R.W.; Chipman, J.W. Remote Sensing and Image Interpretation, 6th ed.; Wiley: Hoboken, NJ, USA, 2008; p. 756. [Google Scholar]
- Lara, M.J.; Chipman, M.L.; Hu, F.S. Automated detection of thermoerosion in permafrost ecosystems using temporally dense Landsat image stacks. Remote Sens. Environ. 2019, 221, 462–473. [Google Scholar] [CrossRef]
- Côté, M.M.; Burn, C.R. The oriented lakes of Tuktoyaktuk Peninsula, Western Arctic Coast, Canada: A GIS-based analysis. Permafr. Periglac. Process. 2002, 13, 61–70. [Google Scholar] [CrossRef]
- Wolfe, S.; Murton, J.; Bateman, M.; Barlow, J. Oriented-lake development in the context of late Quaternary landscape evolution, McKinley Bay Coastal Plain, western Arctic Canada. Quat. Sci. Rev. 2020, 242, 106414. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Korzeniowska, K.; Korup, O. Object-based detection of lakes prone to seasonal ice cover on the Tibetan Plateau. Remote Sens. 2017, 9, 339. [Google Scholar] [CrossRef] [Green Version]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Himmelstoss, E.A.; Henderson, R.E.; Kratzmann, M.G.; Farris, A.S. Digital Shoreline Analysis System (DSAS) Version 5.0 User Guide; Open-File Report 2018-1179; US Geological Survey: Menlo Park, CA, USA, 2018; p. 126.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Date [mm/dd/yyyy] | Spatial Resolution [m] | Sensor | |
|---|---|---|---|
| Deadhorse | |||
| 08/15/2006 | 2.8 m | 0.7 m | Quickbird-2 |
| 07/09/2010 | 2.0 m | 0.5 m | WorldView-2 |
| 07/16/2013 | 2.0 m | 0.5 m | WorldView-2 |
| 07/10/2016 | 2.0 m | 0.3 m | WorldView-3 |
| Dalton Highway MP 396 | |||
| 08/27/2016 | 2.0 m | 0.5 m | WorldView-2 |
| Deadhorse | MP 396 | |||
|---|---|---|---|---|
| 2006–2010 | 2010–2013 | 2013–2016 | 2016 | |
| Detection | 205 | 233 | 227 | 66 |
| Empty | 31 | 73 | 91 | – |
| 0.10–0.36 ha | 87 | 62 | 48 | 39 |
| 0.36–1.44 ha | 58 | 52 | 58 | 15 |
| 1.44–5.76 ha | 16 | 25 | 12 | 6 |
| 5.76–23.04 ha | 5 | 6 | 5 | 6 |
| >23.04 ha | 8 | 15 | 13 | 0 |
| Total | 174 | 160 | 136 | 66 |
| In every time step | 109 | – | ||
| Category Error Sources | Water Body Detection Incorrect | Shoreline Movement Rate Incorrect |
|---|---|---|
| Deadhorse | 23 lakes | 52 lakes |
| Shore area | ||
| Sunglint | ||
| Connectivity | ||
| Water level | − | |
| MP 396 | 13 lakes | − |
| Shore area | − | |
| Sunglint | − | − |
| Connectivity | − | |
| Water level | − |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaiser, S.; Grosse, G.; Boike, J.; Langer, M. Monitoring the Transformation of Arctic Landscapes: Automated Shoreline Change Detection of Lakes Using Very High Resolution Imagery. Remote Sens. 2021, 13, 2802. https://doi.org/10.3390/rs13142802
Kaiser S, Grosse G, Boike J, Langer M. Monitoring the Transformation of Arctic Landscapes: Automated Shoreline Change Detection of Lakes Using Very High Resolution Imagery. Remote Sensing. 2021; 13(14):2802. https://doi.org/10.3390/rs13142802
Chicago/Turabian StyleKaiser, Soraya, Guido Grosse, Julia Boike, and Moritz Langer. 2021. "Monitoring the Transformation of Arctic Landscapes: Automated Shoreline Change Detection of Lakes Using Very High Resolution Imagery" Remote Sensing 13, no. 14: 2802. https://doi.org/10.3390/rs13142802
APA StyleKaiser, S., Grosse, G., Boike, J., & Langer, M. (2021). Monitoring the Transformation of Arctic Landscapes: Automated Shoreline Change Detection of Lakes Using Very High Resolution Imagery. Remote Sensing, 13(14), 2802. https://doi.org/10.3390/rs13142802