
The Methodology for Identifying Secondary Succession in Non-Forest Natura 2000 Habitats Using Multi-Source Airborne Remote Sensing Data

 , , , and
, , , and
Abstract
:1. Introduction
2. Project HabitARS Overview
3. Proposed Methodology of Secondary Succession Process Identification—Result of the Project
- Step 1—Data acquisition and pre-processing.
- Step 2—Determining the spatial extent of the potential succession of trees and shrubs.
- Step 3—Determining the level of potential threat of succession for the whole analysed area.
- Step 4—Determining the level of threat of succession for selected individual habitats based on area and height characteristics.
- Step 5—Determining the level of threat of succession for selected individual habitats based on species composition.
- Step 6—Determining the succession dynamics for selected individual habitats.
3.1. Step 1—Data Acquisition and Pre-Processing
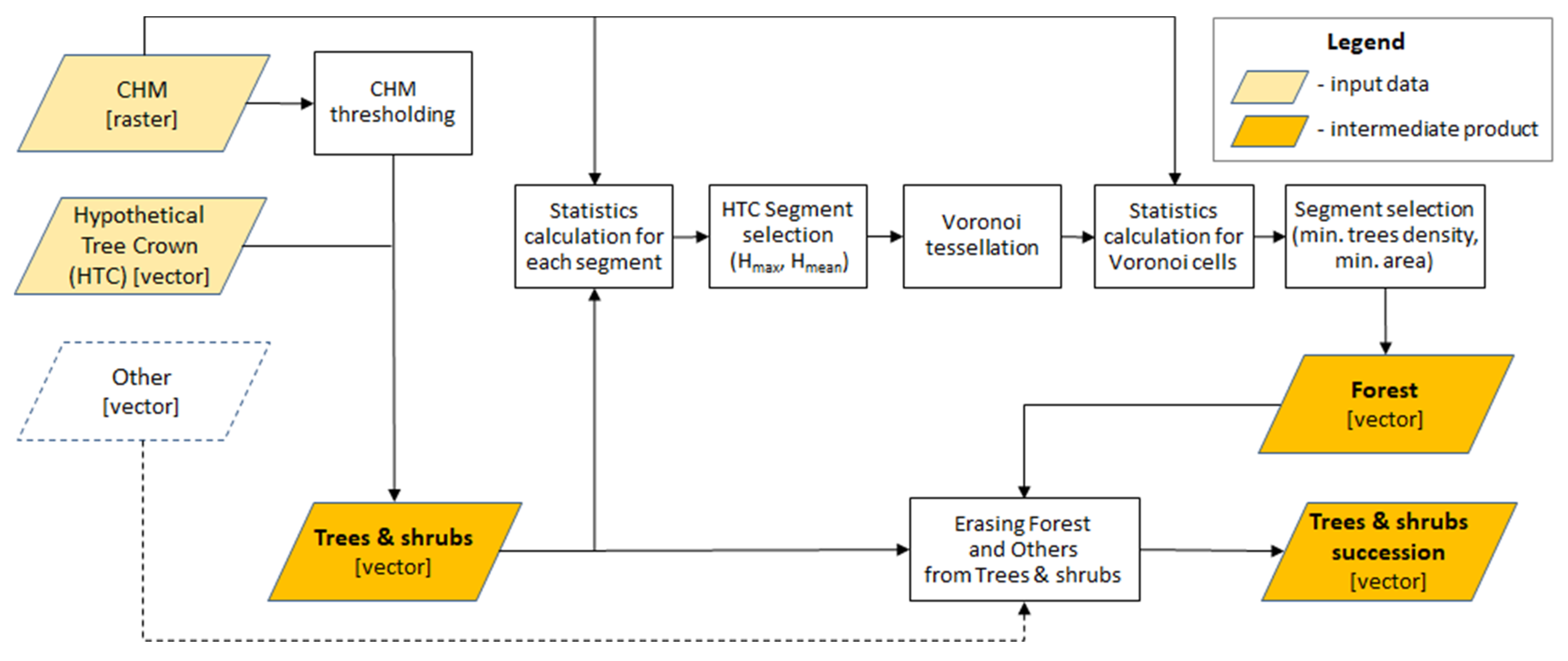
3.2. Step 2—Determining the Spatial Extent of the Potential Succession of Trees and Shrubs
3.3. Step 3—Determining the Level of Potential Threat of Succession for the Whole Analysed Area
3.4. Step 4—Determining the Level of Threat of Succession for Selected Individual Habitats Based on Area and Height Characteristics
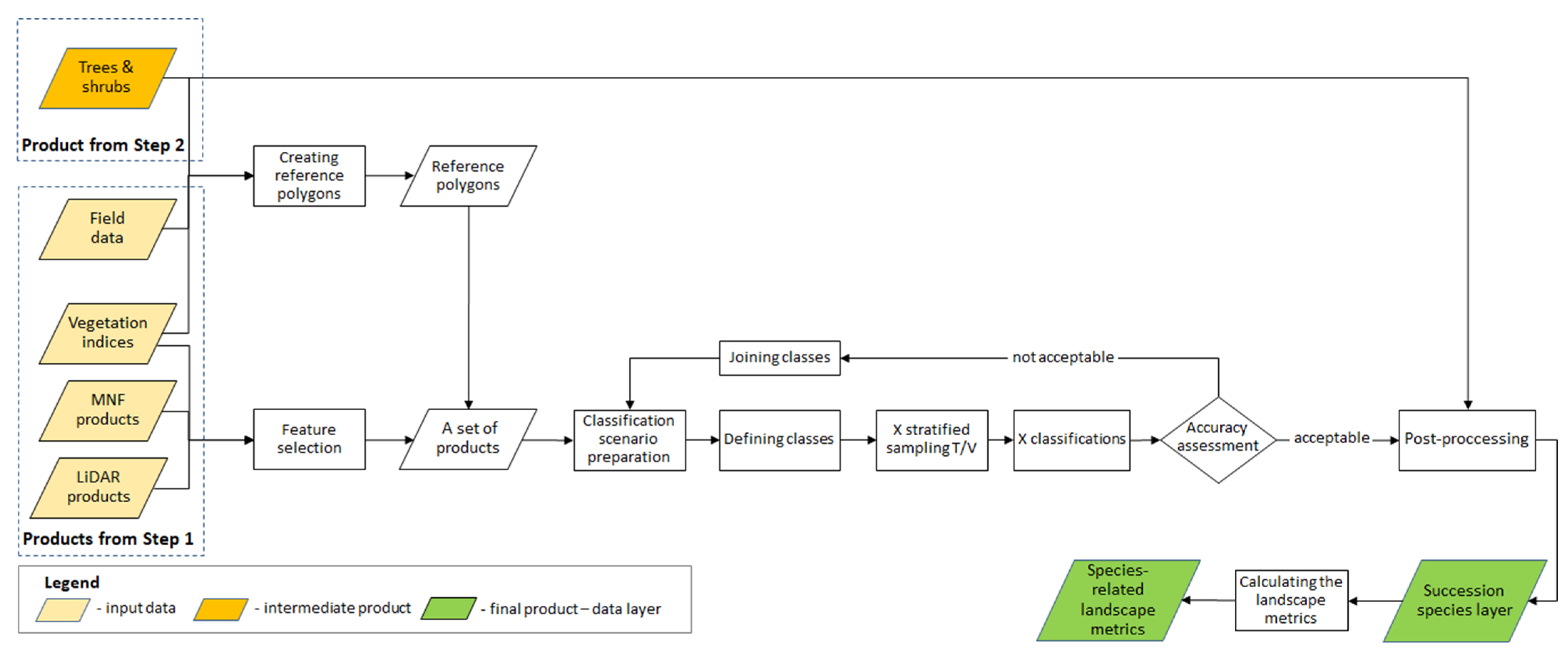
3.5. Step 5—Determining the Level of Threat of Succession for Selected Individual Habitats Based on Species Composition
- Creating reference polygons;
- Applying a feature selection algorithm to the remote sensing products;
- Iterative classification and determining the spatial extent of individual species;
- Calculating the landscape metric.
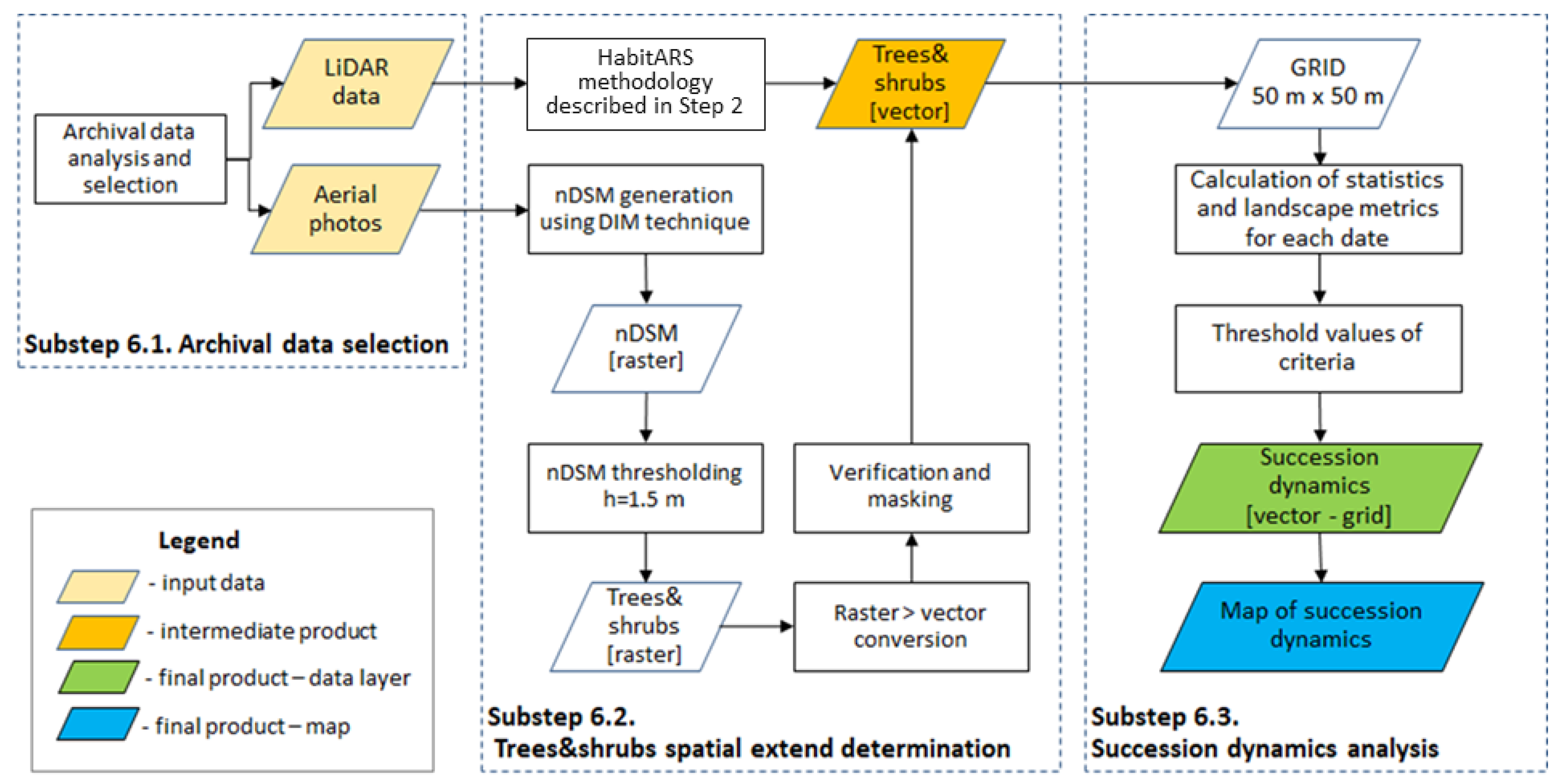
3.6. Step 6—Determining the Succession Dynamics for Selected Individual Habitats
- They were acquired during the leaf-on season, allowing data acquisition presenting fully developed crowns of trees and shrubs (in Poland it is from the second half of May to the end of September/beginning of October);
- In the case of LiDAR data, the scanning density is at least 7 pt/m2;
- In the case of archival aerial photographs, their scale is at least 1:13,000 (in relation to analogue images) or GSD ≤ 25 cm (in relation to images acquired with digital cameras) and whether they are of good radiometric quality (good contrast and large range of values) shades/colours.
- Change (balance) of the total area of patches of trees and shrubs in the grid calculated for a period of 5 years;
- Change (balance) of the total area of patches of trees and shrubs in the grid calculated for a period of 5 years.
4. Discussion
4.1. Determination of Extent of Trees and Shrubs—Limitations and Requirements
4.2. Tree and Shrub Species Identification—Limitations and Requirements
4.3. Trees and Shrubs Succession as a Threat to the Natura 2000 Habitats
4.4. Succession Dynamics Analysis—Limitations and Requirements
4.5. Flexibility of the Methodology
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Results of the Selected Experiments


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| nDSM Threshold Value | Parameter | Date of the Archival Photos Acquisition | ||||
|---|---|---|---|---|---|---|
| 11 August 1971 | 30 May 1996 | 24 May 2003 | 29 April 2009 | 08 August 2015 | ||
| No. of polygons | 831 | 1835 | 3580 | 4429 | 3019 | |
| 1.0 m | OA | 0.850 | 0.833 | 0.914 | 0.902 | 0.926 |
| Recall | 0.963 | 0.854 | 0.877 | 0.774 | 0.964 | |
| Precision | 0.422 | 0.522 | 0.794 | 0.923 | 0.863 | |
| Kappa | 0.512 | 0.546 | 0.776 | 0.772 | 0.848 | |
| F1-score | 0.587 | 0.648 | 0.833 | 0.842 | 0.911 | |
| 1.25 m | OA | 0.872 | 0.886 | 0.919 | 0.902 | 0.936 |
| Recall | 0.958 | 0.814 | 0.865 | 0.765 | 0.955 | |
| Precision | 0.461 | 0.646 | 0.816 | 0.932 | 0.890 | |
| Kappa | 0.556 | 0.650 | 0.786 | 0.770 | 0.867 | |
| F1-score | 0.622 | 0.720 | 0.840 | 0.840 | 0.921 | |
| 1.5 m | OA | 0.889 | 0.911 | 0.922 | 0.901 | 0.939 |
| Recall | 0.950 | 0.781 | 0.854 | 0.756 | 0.945 | |
| Precision | 0.498 | 0.739 | 0.832 | 0.939 | 0.904 | |
| Kappa | 0.595 | 0.704 | 0.791 | 0.767 | 0.873 | |
| F1-score | 0.653 | 0.759 | 0.843 | 0.837 | 0.924 | |
| 1.75 m | OA | 0.903 | 0.922 | 0.923 | 0.900 | 0.942 |
| Recall | 0.934 | 0.755 | 0.844 | 0.747 | 0.937 | |
| Precision | 0.535 | 0.802 | 0.844 | 0.944 | 0.916 | |
| Kappa | 0.630 | 0.731 | 0.793 | 0.763 | 0.878 | |
| F1-score | 0.653 | 0.778 | 0.844 | 0.834 | 0.926 | |
| 2.0 m | OA | 0.903 | 0.927 | 0.924 | 0.898 | 0.942 |
| Recall | 0.886 | 0.734 | 0.833 | 0.740 | 0.928 | |
| Precision | 0.588 | 0.842 | 0.854 | 0.948 | 0.924 | |
| Kappa | 0.663 | 0.742 | 0.793 | 0.760 | 0.878 | |
| F1-score | 0.707 | 0.748 | 0.844 | 0.831 | 0.926 | |
| nDSM Threshold Value | Parameter | Date of the Archival Photos Acquisition | ||||
|---|---|---|---|---|---|---|
| 11 August 1971 | 30 May 1996 | 24 May 2003 | 29 April 2009 | 08 August 2015 | ||
| 1.0 m | EO | 0.43 | 3.13 | 3.70 | 9.21 | 1.64 |
| EC | 15.66 | 12.24 | 5.46 | 1.70 | 5.73 | |
| EO + EC | 16.09 | 15.37 | 9.16 | 10.91 | 7.37 | |
| 1.25 m | EO | 0.49 | 4.02 | 4.06 | 9.62 | 2.05 |
| EC | 13.13 | 6.76 | 4.75 | 1.50 | 4.53 | |
| EO + EC | 13.62 | 10.78 | 8.81 | 11.12 | 6.58 | |
| 1.5 m | EO | 0.58 | 4.77 | 4.39 | 9.99 | 2.51 |
| EC | 11.04 | 4.08 | 4.24 | 1.35 | 3.87 | |
| EO + EC | 11.62 | 8.85 | 8.63 | 11.34 | 6.38 | |
| 1.75 m | EO | 0.79 | 5.34 | 4.70 | 10.33 | 2.86 |
| EC | 9.22 | 2.72 | 3.86 | 1.25 | 3.38 | |
| EO + EC | 10.01 | 8.06 | 8.56 | 11.58 | 6.24 | |
| 2.0 m | EO | 1.45 | 5.81 | 5.01 | 10.66 | 3.27 |
| EC | 8.90 | 2.01 | 3.52 | 1.16 | 3.03 | |
| EO + EC | 10.35 | 7.82 | 8.53 | 11.82 | 6.30 | |
| Area of the reference mask | 13.66 | 22.58 | 30.95 | 42.88 | 49.78 | |
| Species | Spatial Resolution | 1 m | 1 m | 1 m | 0.5 m | 0.5 m | 0.5 m |
|---|---|---|---|---|---|---|---|
| Variant | var 1 | var 2 | var 3 | var 1 | var 2 | var 3 | |
| Kappa | 0.55 | 0.57 | 0.67 | 0.56 | 0.62 | 0.68 | |
| Betula pendula | F1 | 0.60 | 0.65 | 0.78 | 0.62 | 0.68 | 0.79 |
| Salix spp. | F1 | 0.80 | 0.83 | 0.87 | 0.80 | 0.86 | 0.87 |
| Frangula alnus | F1 | 0.57 | 0.56 | 0.75 | 0.58 | 0.61 | 0.76 |
| Pinus sylvestris | F1 | 0.70 | 0.68 | 0.76 | 0.70 | 0.76 | 0.80 |
| Quercus robur | F1 | 0.55 | 0.72 | 0.75 | 0.55 | 0.69 | 0.72 |
| Pyrus communis | F1 | 0.28 | 0.21 | 0.27 | 0.25 | 0.27 | 0.33 |
| Padus serotina | F1 | 0.16 | 0.19 | 0.10 | 0.17 | 0.20 | 0.15 |
| Kappa | 0.51 | 0.54 | 0.65 | 0.52 | 0.58 | 0.66 | |
| Betula pendula | F1 | 0.52 | 0.51 | 0.66 | 0.56 | 0.57 | 0.69 |
| Rhamnus catharticus | F1 | 0.49 | 0.53 | 0.59 | 0.50 | 0.54 | 0.64 |
| Prunus spinosa | F1 | 0.67 | 0.71 | 0.82 | 0.63 | 0.71 | 0.78 |
| Pinus sylvestris | F1 | 0.58 | 0.61 | 0.72 | 0.59 | 0.69 | 0.76 |
| Quercus robur | F1 | 0.49 | 0.10 | 0.00 | 0.46 | 0.04 | 0.02 |
| Pyrus communis | F1 | 0.49 | 0.47 | 0.69 | 0.46 | 0.47 | 0.62 |
| Padus serotina | F1 | 0.56 | 0.60 | 0.69 | 0.57 | 0.62 | 0.69 |
| Juniperus communis | F1 | 0.62 | 0.62 | 0.69 | 0.64 | 0.69 | 0.68 |
| Corylus avellana | F1 | 0.54 | 0.63 | 0.72 | 0.51 | 0.66 | 0.74 |
| Robinia pseudoacacia | F1 | 0.62 | 0.69 | 0.75 | 0.65 | 0.71 | 0.78 |
| Cornus sanguinea | F1 | 0.64 | 0.67 | 0.70 | 0.62 | 0.67 | 0.74 |
| Cratageus_spp. | F1 | 0.47 | 0.51 | 0.68 | 0.47 | 0.57 | 0.61 |
| BI2 Study Area | ||||
| Species | spring 22 June 2017 | summer 12 August 2017 | autumn 29 September 2017 | |
| Kappa | 0.52 | 0.57 | 0.58 | |
| Salix cinerea | F1 | 0.79 | 0.77 | 0.79 |
| Pinus sylvestris | F1 | 0.74 | 0.75 | 0.77 |
| Alnus glutinosa | F1 | 0.51 | 0.57 | 0.65 |
| Betula pubescens | F1 | 0.36 | 0.49 | 0.42 |
| BU4 Study Area | ||||
| Species | spring 28 May 2017 | summer 10 July 2017 | autumn 9 September 2017 | |
| Kappa | 0.79 | 0.71 | 0.72 | |
| Pinus sylvestris | F1 | 0.9 | 0.63 | 0.78 |
| Betula pendula | F1 | 0.74 | 0.78 | 0.69 |
| Padus serotina | F1 | 0.92 | 0.91 | 0.89 |
| Populus tremula | F1 | 0.82 | 0.69 | 0.74 |
| NI1 study area | ||||
| Species | spring 18 May 2017 | summer 30 July 2017 | autumn 27 September 2017 | |
| Kappa | 0.52 | 0.68 | 0.73 | |
| Rhamnus catharticus | F1 | 0.37 | 0.33 | 0.48 |
| Pinus sylvestris | F1 | 0.75 | 0.74 | 0.78 |
| Robinia pseudoacacia | F1 | 0.65 | 0.82 | 0.83 |
| Prunus spinosa | F1 | 0.71 | 0.83 | 0.86 |
| Cratageus_spp. | F1 | 0.48 | 0.44 | 0.33 |
| Cornus sanguinea | F1 | 0.59 | 0.84 | 0.86 |
| OM1 study area | ||||
| Species | autumn 10–13 September 2016 | spring 9 June 2017 | summer 11 August 2017 | |
| Kappa | 0.53 | 0.61 | 0.61 | |
| Betula pendula | F1 | 0.78 | 0.75 | 0.76 |
| Rhamnus catharticus | F1 | 0.41 | 0.45 | 0.49 |
| Pinus sylvestris | F1 | 0.52 | 0.7 | 0.7 |
| Juniperus communis | F1 | 0.48 | 0.57 | 0.61 |
| Robinia pseudoacacia | F1 | 0.71 | 0.77 | 0.77 |
| Cratageus_spp. + Pyrus communis | F1 | 0.43 | 0.61 | 0.53 |
| Prunus spinosa | F1 | 0.68 | 0.76 | 0.71 |
| Corylus avellana | F1 | 0.61 | 0.72 | 0.66 |
| Padus serotina | F1 | 0.44 | 0.39 | 0.44 |
Appendix B. Field Campaign Guidelines
Appendix C. Landscape Metric’s Description
| Metrics Name | Formula | Units | Metric‘s Description/Interpretation |
|---|---|---|---|
| Metrics characterising the area of shrub and tree patches | |||
| Area Metrics | |||
| Total area of patches of shrubs and trees in the grid or Natura 2000 habitat | ai—area of the individual patch of shrubs and trees n— number of patches of shrubs and trees | m2 | TA is a measure of landscape composition. It shows to what extent the analysed landscape (grid or Natura 2000 habitat) is comprised of shrub and tree patches. This is the basic parameter describing the encroachment of trees and shrubs into a given area. Its analysis should be combined with the analysis of other metrics. TA takes values greater than or equal to 0. Value 0 means that there are no shrubs and trees in the analysed grid. The upper limit of the value is only limited by the grid size area. |
| Percentage share of the area covered by patches of shrubs and trees within the grid or Natura 2000 habitat | A—area of the analysed grid or Natura 2000 habitat | % | %TA quantifies the proportional abundance of patches of shrubs and trees in the analysed landscape (grid or Natura 2000 habitat). This is a basic parameter describing the encroachment of trees and shrubs into a given area. %TA takes values in the range 0–100. Value 0 means that there are no shrubs and trees in the analysed grid or Natura 2000 habitat. A value of 100 means that the entire landscape consists of only trees and shrubs. |
| Mean size (area) of patches of shrubs and trees in the grid or Natura 2000 habitat | m2 | MSP is a metric informing about the average size of patches of shrubs and trees in the analysed area (grid or Natura 2000 habitat). The lower the value of the metric, the smaller (on average) the patches of trees and shrubs. In the case of large and sparse patches of high trees and shrubs, it can be assumed that the succession process is not progressing. On the other hand, a large number of small-area and low-height tree and shrub patches may indicate succession in the analysed area. MPS takes values greater than or equal to 0. The upper limit of the value is limited by the size of the analysed area. | |
| Standard deviation of size of shrub and tree patches (area) in the grid or Natura 2000 habitat | m2 | SDP measures absolute variation in patch size and is affected by the average patch size. It is a measure of the variation in the size of patches of trees and shrubs in the analysed area (grid or Natura 2000 habitat). The higher SDP value, the greater the variation in the size of tree and shrub patches in this area. High value means that there are patches of trees and shrubs of various sizes. In the case of low values of SDP, the area is characterized by trees and shrubs of similar size. This metric, together with other ones (e.g., MSP, NumP, hmean), allows us to assess whether succession of trees and shrubs is present in a given area. SDP takes values greater than or equal to 0. | |
| Edge Metrics | |||
| Total Edge—the sum of the lengths of all edge of shrub and tree patches in the grid or Natura 2000 habitat | ei—lengths of edge of shrub and tree patches | m | TE is the sum of the lengths of the borders of all patches of trees and shrubs in the analysed area (grid or Natura 2000 habitat). It is an absolute index, and in the case of comparing areas of different sizes, it is of less utility than border density (ED), described below. However, when analysing areas of a similar size or analysing the same area in subsequent periods, it may be very useful. TE gives information about the complexity of shapes of tree and shrub patches. The more complicated the shape, the longer the boundaries are. TE takes values greater than or equal to 0. Value 0 means that there are no patches of trees and shrubs in the analysed area. |
| Edge Density—the sum of the lengths of all edge of shrub and tree patches, divided by the total grid or Natura 2000 habitat area | m/m2 | ED is a relative measure related to the area of the analysed area—in the grid or Natura 2000 habitat. It enables the comparison of areas with different sizes. ED indirectly indicates of the complexity of shapes of patches within the analysed area. More complex shapes with a smaller area of trees and shrubs patches at the same time indicate the succession process. In the case of forest, TE will be lower, and also TA will be lower. ED takes values greater than or equal to 0. Value 0 means no trees and shrubs are present in the analysed area. | |
| Subdivision Metrics | |||
| Number of patches of shrubs and trees in the grid or Natura 2000 habitat | - | NumP is a simple measure of the degree of division or fragmentation of the analysed area (grid or Natura 2000 habitat). In general, the information on the number of patches has limited interpretative value as it does not provide information about the analysed area, distribution or density of patches. However, in the case of a comparative analysis of the area NumP can be a useful metric for interpreting the level of succession of trees and shrubs, especially when it is analysed simultaneously with other metrics (e.g., TA, TE, %SS). A large number of tree and shrub patches may indicate a progressive succession process, which can be used in the case of time-series analyses. The lowest possible values of NumP is 0 and has no upper boundary. | |
| Shape Metrics | |||
| Area-weighted mean patch (of shrubs and trees) fractal dimension, calculated in the grid or Natura 2000 habitat | - | AWMPFD is the surface weighted average fractal dimension, which indicates the complexity of shapes of tree and shrub patches in the study area (grid or Natura 2000 habitat). It is a relative metric taking into account the size of the analysed areas. The higher the value of this metric, the greater the complexity of the shape of trees and shrubs patches in this area. This, in turn, may indicate the intensification of the process of succession of trees and shrubs, in particular when we compare the results of the analysis in subsequent periods. | |
| Metrics characterising the height structure of shrubs and trees | |||
| Average height of shrubs and trees in the grid or Natura 2000 habitat | m | The height of trees and shrubs makes it possible to assess what kind of vegetation is present in the studied area (grid or Natura 2000 habitat). However, both the average and maximum height of trees and shrubs should not be considered on their own, without taking into account the area metrics. When there are many patches of low trees and shrubs with a small area, it is highly probable that the succession process is observed in this area. If there are a few high-height patches of trees and shrubs, it is a group of trees. | |
| Maximum height of shrubs and trees in the grid or Natura 2000 habitat | m | ||
| Standard deviation of the height of shrubs and trees in the grid or Natura 2000 habitat | m | Standard deviation of the height of shrubs and trees (hSD), calculated for the studied area (grid or Natura 2000 habitat), informs about the variation in the height of trees and shrubs. In the case of low hSD values, shrubs and trees in the study area have similar heights. When hSD value is high, there are trees and shrubs of various heights in the analysed area. In such a case, the area metrics should also be analysed, as it may indicate a succession process. | |
| Metrics Name | Formula | Units | Metric’s Description/Interpretation |
|---|---|---|---|
| Metrics characterising the area of shrub and tree patchesin a buffer of 50 m from the border of the Natura 2000 habitat | |||
| Area Metrics | |||
| Sum of the area of patches of trees and shrubs in a buffer of 50 m from the border of the habitat | ai—area of individual shrub and tree patches in a buffer of 50 m from the border of the habitat nbuffer—number of patches of shrubs and trees in a buffer of 50 m from the border of the habitat | m2 | TAbuffer metrics shows to what extent the analysed buffer is comprised of shrub and tree patches. The TAbuffer takes values greater than or equal to 0. Value 0 means that there are no shrubs and trees in the analysed buffer. The upper limit of the value is only limited by the size of the buffer area. If there are many trees and shrubs in the buffer around a Natura 2000 habitat, and they are successive species, then TA shows the presence of threat from the succession process in the habitat. |
| Percentage of the area of patches of trees and shrubs in a buffer of 50 m from the border of the habitat | Abuffer—area of a buffer of 50 m from the border of a habitat | % | %TAbuffer metric quantifies the proportional abundance of patches of shrubs and trees in the buffer from the border of the analysed Natura 2000 habitat. It is the basic parameter describing the presence of trees and shrubs in the buffer around the Natura 2000 habitat. %TAbuffer takes values in the range 0–100. Value 0 means that there are no shrubs and trees in the buffer from the border of the analysed Natura 2000 habitat. A value of 100 means that the buffer contains only trees and shrubs. If these are successive species, the threat to the conservation of the habitat will be high. |
| Percentage share of succession species in the area of shrubs and trees (species of succession + other tree and shrubs species = 100%) in a buffer of 50 m from the habitat | SSbuffer—area of the succession species | This metric shows how large the part of the buffer area around the habitat consisting succession species is. The higher the value of this metric, the greater the threat to the preservation of the habitat. %SSbuffer takes values between 0–100. Value 0 means that there are no species of succession in the buffer from the border of the analysed Natura 2000 habitat. A value of 100 means that the buffer contains only species of succession. | |
| Mean size (area) of patches of shrubs and trees in a buffer of 50 m from the habitat | m2 | This is a metric informing about the average size of patches of shrubs and trees in a buffer of 50 m from the analysed Natura 2000 habitat. The lower the value of the metric, the smaller the patches of trees and shrubs in the buffer. In the case of large-area, high-height trees and shrubs, it can be presumed that there are forest stands in the buffer. In contrast, the large number of small-area and low-height tree and shrub patches may indicate succession in the area under study. MPSbuffer takes values greater than or equal to 0. The upper limit of the value is limited by the size of the analysed buffer. | |
| Standard deviation of size of shrub and tree patches (area) in in a buffer of 50 m from the habitat | m2 | SDPbuffer measures absolute variation in patch sizes and is affected by the average patch size. It is a measure of the variation in the size of patches of trees and shrubs in the buffer around the analysed Natura 2000 habitat. The higher SDPbuffer value, the greater the variation in the size of patches of trees and shrubs in a buffer. This means that there are patches of trees and shrubs of various sizes. In the case of small SDPbuffer values, patches of trees and shrubs are of similar size. This metric with other ones (e.g., MSPbuffer, NumPbuffer) allows us to assess if succession is present in the buffer. SDPbuffer takes values greater than or equal to 0. | |
| Subdivision Metrics | |||
| Number of patches of shrubs and trees in in a buffer of 50 m from the habitat | - | NumPbuffer is a simple measure of the degree of division or fragmentation of the analysed area and may indicate changes taking place. The more patches of trees and shrubs in the buffer around the analysed habitat, the greater is the potential threat of trees and shrubs entering the Natura 2000 site. A combined analysis with %TAbuffer and %SSbuffer metrics will indicate whether the threat is real. NumPbuffer is 0 and has no upper boundary. | |
| Metrics characterising the distance of tree and shrub patches relative to the border of the habitat (in a buffer of 50 m from the border of the habitat) | |||
| Minimum distance of the tree or shrub patch border to the border of the habitat in a buffer of 50 m from the habitat | di—the distance of the i-th patch of trees and shrubs from the border of the habitat | m | The distance of trees and shrubs from the Natura 2000 habitat is one of the measures of the threat of the succession process. If succession trees and shrubs occur in the neighbourhood of the Natura 2000 habitat, there is a greater risk of spreading succession species in its area than if they are located at considerable distances from the boundaries of the habitat. If the values of the minDbuffer and meanDbuffer are similar, and there are many trees and shrubs around the habitat, it may mean that there is a threat of succession. |
| Mean distance of the tree or shrub patch border to the border of the habitat in a buffer of 50 m from the habitat | m | ||
References
- Mróz, W. Monitoring Siedlisk Przyrodniczych. Przewodnik Metodyczny. Część I [Natura 2000 Habitat Monitoring. Methodical Guide. Part I]; Biblioteka Monitoringu Środowiska, GIOŚ: Warsaw, Poland, 2010. [Google Scholar]
- Lengyel, S.; Kobler, A.; Kutnar, L.; Framstad, E.; Henry, P.Y.; Babij, V.; Gruber, B.; Schmeller, D.; Henle, K. A review and a framework for the integration of biodiversity monitoring at the habitat level. Biodivers. Conserv. 2008, 17, 3341–3356. [Google Scholar] [CrossRef]
- Lengyel, S.; Déri, E.; Varga, Z.; Horvath, R.; Tóthmérész, B.; Henry, P.-Y.; Kobler, A.; Kutnar, L.; Babij, V.; Seliškar, A.; et al. Habitat monitoring in Europe: A description of current practices. Biodivers. Conserv. 2008, 17, 3327–3339. [Google Scholar] [CrossRef]
- Ellwanger, G.; Runge, S.; Wagner, M.; Ackermann, W.; Neukirchen, M.; Frederking, W.; Müller, C.; Ssymank, A.; Sukopp, U. Current status of habitat monitoring in the European Union according to Article 17 of the Habitats Directive, with an emphasis on habitat structure and functions on Germany. Nat. Conserv. 2018, 29, 57–78. [Google Scholar] [CrossRef] [Green Version]
- Jermaczek-Sitak, M. Interpretacja i ocena stanu siedlisk–doświadczenia transgraniczne na przykładzie Dolnej Odry (Interpretation and assessment of habitats–cross-border experience in Lower Odra Valley). Przegląd Przyr. 2015, 4, 66–75. [Google Scholar]
- Barabasz-Krasny, B. Vegetation differentiation and secondary succession on abandoned agricultural large-areas in south-eastern Poland. Biodiv. Res. Conserv. 2016, 41, 35–50. [Google Scholar] [CrossRef] [Green Version]
- Faliński, J.B. Vegetation dynamics in temperate lowland primeval forest. Ecological studies in Białowieża forest. Geobotany 1986, 8, 1–537. [Google Scholar]
- Kahmen, S.; Poschlod, P. Plant functional trait responses to grassland succession over 25 years. J. Veg. Sci. 2004, 15, 21–32. [Google Scholar] [CrossRef]
- Rosenthal, G. Secondary succession in a fallow central European wet grassland. Flora 2010, 205, 153–160. [Google Scholar] [CrossRef]
- Uematsu, Y.; Koga, T.; Mitsuhashi, H.; Ushimaru, A. Abandonment and intensified use of agricultural land decrease habitats of rare herbs in semi-natural grasslands. Agric. Ecosyst. Environ. 2010, 135, 304–309. [Google Scholar] [CrossRef]
- Adamowski, W.; Bomanowska, A. Udział traw w sukcesji wtórnej na niekoszonej łące grądowej w Puszczy Białowieskiej [Share of grasses in secondary succession on unmown meadow in Białowieża]. Forest. Fragm. Flor. Geobot. Polonica 2011, 18, 375–385. [Google Scholar]
- Peter, M.; Edwards, P.J.; Jeanneret, P.; Kampmann, D.; Lüscher, A. Changes over three decades in the floristic composition of fertile permanent grasslands in the Swiss Alps. Agric. Ecosyst. Environ. 2008, 125, 204–212. [Google Scholar] [CrossRef]
- Kącki, Z.; Michalska-Hejduk, D. Assessment of biodiversity in Molinia Meadows in Kampinoski National Park based on biocenotic indicators. Pol. J. Environ. Stud. 2010, 19, 351–362. [Google Scholar]
- Kucharski, L. Vegetation in abandoned meadows in central Poland: Pilsia valley. Case Study. Acta Sci. Pol. Agric. 2015, 14, 37–47. [Google Scholar]
- Tews, J.; Brose, U.; Grimm, V.; Tielbörger, K.; Wichmann, M.C.; Schwager, M.; Jeltsch, F. Animal species diversity driven by habitat heterogeneity/diversity: The importance of keystone structures. J. Biogeogr. 2004, 31, 79–92. [Google Scholar] [CrossRef] [Green Version]
- Quesada, M.; Sánchez-Azofeifa, G.A.; Álvarez-Añorve, M.; Stoner, K.E.; Ávila-Cabadilla, L.; Calvo-Alvarado, J.; Castillo, A.; Espírito-Santo, M.M.; Fagundes, M.; Fernandes, G.W.; et al. Succession and management of tropical dry forests in the Americas: Review and new perspectives. For. Ecol. Manag. 2009, 258, 1014–1024. [Google Scholar] [CrossRef]
- Neves, F.S.; Oliveira, V.H.F.; Espírito-Santo, M.M.; Vaz-de-Mello, F.Z.; Louzada, J.; Sanchez-Azofeifa, G.A.; Fernandes, G.W. Successional and Seasonal Changes in a Community of dung beetles (Coleoptera: Scarabaeinae) in a Brazilian Tropical Dry Forest. Nat. Conserv. 2010, 8, 160–164. [Google Scholar] [CrossRef]
- Glenn–Lewin, D.C.; Peet, R.K.; Veblen, T.T. (Eds.) Plant Succession. Theory and Prediction; Chapman & Hall: London, UK; Glasgow, UK; New York, NY, USA; Tokyo, Japan; Melbourne, Australia; Madras, India, 1992. [Google Scholar]
- Falińska, K. Plant population processes in the course of forest succession in abandoned meadows. II. Demography and succession promotors. Acta Soc. Bot. Pol. 1989, 58, 467–491. [Google Scholar] [CrossRef] [Green Version]
- Sánchez-Reyes, U.J.; Niño-Maldonado, S.; Barrientos-Lozano, L.; Treviño-Carreón, J. Assessment of land use-cover changes and successional stages of vegetation in the natural protected area Altas Cumbres, Northeastern Mexico, using Landsat satellite imagery. Remote Sens. 2017, 9, 712. [Google Scholar] [CrossRef] [Green Version]
- Kędziora, A.; Ryszkowski, L. Ocena wpływu struktury krajobrazu na bilans cieplny i wodny zlewni wraz z określeniem jej modyfikującej roli dla efektów zmian klimatycznych. In Funkcjonowanie Geoekosystemów w Zróżnicowanych Warunkach Morfoklimatycznych—Monitoring. Ochrona. Edukacja; Karczewski, A., Zwoliński, Z., Eds.; Stowarzyszenie Geomorfologów Polskich: Poznań, Poland, 2001; pp. 202–223. [Google Scholar]
- Michalik, S. Przemiany roślinności kserotermicznej w czasie 20−letniej sukcesji wtórnej na powierzchni badawczej “Grodzisko” w Ojcowskim Parku Narodowym. Prądnik. Prace Muz. Szafera 1990, 2, 43–52. [Google Scholar]
- Matthews, J.W.; Endress, A.G. Rate of succession in restored wetlands and the role of site context. Appl. Veg. Sci. 2010, 13, 346–355. [Google Scholar] [CrossRef]
- Suder, A. Purple-moor grass meadows (alliance Molinion caeruleae Koch 1926) in the eastern part of Silesia Upland: Phytosociological diversity and aspects of protection. Nat. Conserv. 2008, 65, 63–77. [Google Scholar]
- Schuster, C.; Schmidt, T.; Conrad, C.; Kleinschmit, B.; Förster, M. Grassland habitat mapping by intra-annual time series analysis—Comparison of RapidEye and TerraSAR-X satellite data. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 25–34. [Google Scholar] [CrossRef]
- Perennou, C.; Guelmami, A.; Paganini, M.; Philipson, P.; Poulin, B.; Strauch, A.; Tottrup, C.; Truckenbrodt, J.; Geijzendorffer, I.R. Mapping mediterranean wetlands with remote sensing: A good-looking map is not always a good map. Adv. Ecol. Res. 2018, 58, 243–277. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Homayouni, S.; Gill, E. The first wetland inventory map of Newfoundland at a spatial resolution of 10 m using Sentinel-1 and Sentinel-2 data on the Google Earth engine cloud computing platform. Remote Sens. 2019, 11, 43. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.Y.; Asner, G.P. Applications of remote sensing to alien invasive plant studies. Sensors 2009, 9, 4869–4889. [Google Scholar] [CrossRef] [Green Version]
- Dorigo, W.; Lucieer, A.; Podobnikar, T.; Carni, A. Mapping invasive Fallopia japonica by combined spectral. spatial. and temporal analysis of digital orthophotos. Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 185–195. [Google Scholar] [CrossRef]
- Bradley, B.A. Remote detection of invasive plants: A review of spectral, textural and phenological approaches. Biol. Invasions 2014, 16, 1411–1425. [Google Scholar] [CrossRef]
- Marcinkowska-Ochtyra, A.; Jarocińska, A.; Bzdęga, K.; Tokarska-Guzik, B. Classification of expansive grassland species in different growth stages based on hyperspectral and LiDAR data. Remote Sens. 2018, 10, 2019. [Google Scholar] [CrossRef] [Green Version]
- Kopeć, D.; Sabat-Tomala, A.; Michalska-Hejduk, D.; Jarocińska, A.; Niedzielko, J. Application of airborne hyperspectral data for mapping of invasive alien Spiraea tomentosa L.: A serious threat to peat bog plant communities. Wet. Ecol. Manag. 2020, 28, 357–373. [Google Scholar] [CrossRef] [Green Version]
- Marzialetti, F.; Cascone, S.; Frate, L.; Di Febbraro, M.; Acosta, A.T.R.; Carranza, M.L. Measuring Alpha and Beta Diversity by Field and Remote-Sensing Data: A Challenge for Coastal Dunes Biodiversity Monitoring. Remote Sens. 2021, 13, 1928. [Google Scholar] [CrossRef]
- Dabrowska-Zielinska, K.; Budzynska, M.; Tomaszewska, M.; Bartold, M.; Gatkowska, M.; Malek, I.; Turlej, K.; Napiorkowska, M. Monitoring wetlands ecosystems using ALOS PALSAR (L-Band, HV) supplemented by optical data: A case study of Biebrza Wetlands in northeast Poland. Remote Sens. 2014, 6, 1605–1633. [Google Scholar] [CrossRef] [Green Version]
- Dabrowska-Zielinska, K.; Musial, J.; Malinska, A.; Budzynska, M.; Gurdak, R.; Kiryla, W.; Bartold, M.; Grzybowski, P. Soil moisture in the Biebrza Wetlands retrieved from Sentinel-1 imagery. Remote Sens. 2018, 10, 1979. [Google Scholar] [CrossRef] [Green Version]
- Ciężkowski, W.; Szporak-Wasilewska, S.; Kleniewska, M.; Jóźwiak, J.; Gnatowski, T.; Dąbrowski, P.; Góraj, M.; Szatyłowicz, J.; Ignar, S.; Chormański, J. Remotely Sensed Land Surface Temperature-Based Water Stress Index for Wetland Habitats. Remote Sens. 2020, 12, 631. [Google Scholar] [CrossRef] [Green Version]
- Holopainen, M.; Jauhiainen, S. Detection of peatland vegetation types using digitized aerial photographs. Can. J. Remote Sens. 1999, 25, 475–485. [Google Scholar] [CrossRef]
- Miller, M.E. Use of historic aerial photography to study vegetation change in the Negrito Creek watershed, southwestern New Mexico. Southwest. Nat. 1999, 44, 121–131. [Google Scholar]
- Pitt, D.; Runesson, U.; Bell, F.W. Application of large- and medium-scale aerial photographs to forest vegetation management: A case study. For. Chron. 2000, 76, 6. [Google Scholar] [CrossRef] [Green Version]
- Ligocki, M. Zastosowanie zdjęć lotniczych do badania sukcesji wtórnej na polanach śródleśnych. Teledetekcja Sr. 2001, 32, 143–151. [Google Scholar]
- Batistella, M.; Lu, D. Integrating field data and remote sensing to identify secondary succession stages in the Amazon. In Proceedings of the 29th International Symposium on Remote Sensing of Environment, Buenos Aires, Argentina, 8–12 April 2002. [Google Scholar]
- Jauhiainen, S.; Holopainen, M.; Rasinmäki, A. Monitoring peatland vegetation by means of digitized aerial photographs. Scand. J. For. Res. 2007, 22, 168–177. [Google Scholar] [CrossRef]
- Próchnicki, P. The implementation of GIS and remote sensing to analysis of shrub succession in the Narew National Park. Ann. Geomat. 2006, I, 127–134. [Google Scholar]
- Rahmonov, O.; Oleś, W. Vegetation succession over an area of a medieval ecological disaster. The case of the Błędów Desert. Poland. Erkunde 2010, 64, 241–255. [Google Scholar] [CrossRef]
- Oikonomakis, N.; Ganatsas, P. Land cover changes and forest succession trends in a site of Natura 2000 network (Elatia forest), in northern Greece. For. Ecol. Manag. 2012, 285, 153–163. [Google Scholar] [CrossRef]
- Szostak, M.; Wȩżyk, P.; Hawryło, P.; Puchała, M. Monitoring the secondary forest succession and land cover/use changes of the Błȩdów Desert (Poland) using geospatial analyses. Quaest. Geogr. 2016, 35, 5–13. [Google Scholar] [CrossRef] [Green Version]
- Kopeć, D.; Sławik, Ł. How to effectively use long-term remotely sensed data to analyze the process of tree and shrub encroachment into open protected wetlands. Appl. Geogr. 2020, 125, 102345. [Google Scholar] [CrossRef]
- Olmo, V.; Tordoni, E.; Petruzzellis, F.; Bacaro, G.; Altobelli, A. Use of Sentinel-2 Satellite Data for Windthrows Monitoring and Delimiting: The Case of “Vaia” Storm in Friuli Venezia Giulia Region (North-Eastern Italy). Remote Sens. 2021, 13, 1530. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Evans, J.S.; Martinuzzi, S.; Gessler, P.E.; Hudak, A.T. Characterizing forest succession with LIDAR data: An evaluation for the Inland Northwest, USA. Remote Sens. Environ. 2009, 113, 946–956. [Google Scholar] [CrossRef] [Green Version]
- Castillo, M.; Rivard, B.; Sánchez-Azofeifa, A.; Calvo-Alvarado, J.; Dubayah, R. LIDAR remote sensing for secondary tropical dry forest identification. Remote Sens. Environ. 2012, 121, 132–143. [Google Scholar] [CrossRef]
- Martinuzzi, S.; Gould, W.A.; Vierling, L.A.; Hudak, A.T.; Nelson, R.F.; Evans, J.S. Quantifying tropical dry forest type and succession: Substantial improvement with LiDAR. Biotropica 2013, 45, 135–146. [Google Scholar] [CrossRef] [Green Version]
- Kolecka, N.; Kozak, J.; Kaim, D.; Dobosz, D.; Ginzler, C.; Psomas, A. Mapping secondary forest succession on abandoned agricultural land with LiDAR point clouds and terrestrial photography. Remote Sens. 2015, 7, 8300–8322. [Google Scholar] [CrossRef] [Green Version]
- Abbas, S.; Nichol, J.E.; Wong, M.S. Object-based multi-sensor habitat mapping of successional age classes for effective management of a 70-year secondary forest succession. Land Use Policy 2020, 99, 103360. [Google Scholar] [CrossRef]
- Chan, J.C.W.; Spanhove, T.; Ma, J.; Borre, J.V.; Paelinckx, D.; Canters, F. Natura 2000 habitat identification and conservation status assessment with superresolution enhanced hyperspectral (CHRIS/Proba) imagery. In Proceedings of the GEOBIA 2010 Geographic Object-Based Image Analysis, Ghent, Belgium, 29 June–2 July 2010. [Google Scholar]
- Garcia-Millan, V.E.; Sanchez-Azofeifa, G.A.; Malvárez, G.C. Mapping tropical dry forest succession with CHRIS/PROBA hyperspectral images using nonparametric decision trees. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 1–14. [Google Scholar] [CrossRef]
- Szostak, M.; Hawryło, P.; Piela, D. Using of Sentinel-2 images for automation of the forest succession detection. Eur. J. Remote Sens. 2017, 51, 142–149. [Google Scholar] [CrossRef]
- Immitzer, M.; Atzberger, C.; Koukal, T. Tree species classification with random forest using very high spatial resolution 8-band WorldView-2 satellite data. Remote Sens. 2012, 4, 2661–2693. [Google Scholar] [CrossRef] [Green Version]
- Hościło, A. Sukcesja roślinności zaroślowej na obszarze basenu środkowego Biebrzańskiego Parku Narodowego. Prace Instytutu Geodezji i Kartografii 2004, XL, 117–124. [Google Scholar]
- Osińska-Skotak, K.; Jełowicki, Ł.; Bakuła, K.; Michalska-Hejduk, D.; Wylazłowska, J.; Kopeć, D. Analysis of using dense image matching techniques to study the process of secondary succession in non-forest Natura 2000 habitats. Remote Sens. 2019, 11, 893. [Google Scholar] [CrossRef] [Green Version]
- Berveglieri, A.; Tommaselli, A.M.G.; Imai, N.N.; Ribeiro, E.A.W.; Guimaraes, R.B.; Honkavaara, E. Identification of successional stages and cover changes of tropical forest based on Digital Surface Model analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5385–5397. [Google Scholar] [CrossRef]
- Osińska-Skotak, K.; Bakuła, K.; Jełowicki, Ł.; Podkowa, A. Using canopy height model obtained with dense image matching of archival photogrammetric datasets in area analysis of secondary succession. Remote Sens. 2019, 11, 2182. [Google Scholar] [CrossRef] [Green Version]
- San Emeterio, J.L.; Mering, C. Granulometric analysis on remote sensing images: Application to mapping retrospective changes in the Sahelian Ligneous cover. ISPRS Int. J. Geo-Inf. 2016, 5, 192. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Hu, B.; Woods, M.; Brown, G. Characterizing forest succession stages for wildlife habitat assessment using multispectral airborne imagery. Forests 2017, 8, 234. [Google Scholar] [CrossRef] [Green Version]
- Kupidura, P.; Osińska-Skotak, K.; Lesisz, K.; Podkowa, A. The efficacy analysis of determining the wooded and shrubbed area in archival aerial imagery using texture analysis. ISPRS Int. J. Geo-Inf. 2019, 8, 450. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, M. Estimation of tree heights and stand volume using an airborne LiDAR system. Remote Sens. Environ. 1996, 56, 17. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 8899. [Google Scholar] [CrossRef]
- Nurminen, K.; Karjalainen, M.; Yu, X.; Hyyppa, J.; Honkavaara, E. Preformance of dense digital surface models based on image matching in the estimation of plot-level forest variables. ISPRS J. Photogramm. 2013, 83, 104115. [Google Scholar] [CrossRef]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppa, J.; Hyyppa, H. Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]
- Stepper, C.; Straub, C.; Pretzsch, H. Using semi-global matching point clouds to estimate growing stock at the plot and stand levels: Application for a broadleaf-dominated forest in central Europe. Can. J. For. Res. 2015, 45, 111–123. [Google Scholar] [CrossRef]
- Voss, M.; Sugumaran, R. Seasonal effect on tree species classification in an urban environment using hyperspectral data, LiDAR, and an object-oriented approach. Sensors 2008, 8, 3020–3036. [Google Scholar] [CrossRef] [Green Version]
- Pu, R.; Liu, D. Segmented canonical discriminant analysis of in situ hyperspectral data for identifying 13 urban tree species. Int. J. Remote Sens. 2011, 32, 2207–2226. [Google Scholar] [CrossRef]
- Jensen, R.R.; Hardin, P.J.; Hardin, A.J. Classification of urban tree species using hyperspectral imagery. Geocarto Int. 2012, 27, 443–458. [Google Scholar] [CrossRef]
- Zhang, K.; Hu, B. Individual urban tree species classification using very high spatial resolution airborne multi-spectral imagery using longitudinal profiles. Remote Sens. 2012, 4, 1741–1757. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Bookhagen, B.; Roberts, D.A. Urban tree species mapping using hyperspectral and LIDAR data fusion. Remote Sens. Environ. 2014, 148, 70–83. [Google Scholar] [CrossRef]
- Liu, L.; Coops, N.C.; Aven, N.W.; Pang, Y. Mapping urban tree species using integrated airborne hyperspectral and LiDAR remote sensing data. Remote Sens. Environ. 2017, 200, 170–182. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Fusion of hyperspectral and LIDAR remote sensing data for classification of complex forest areas. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1416–1427. [Google Scholar] [CrossRef] [Green Version]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Tree species classification in the Southern Alps based on the fusion of very high geometrical resolution multispectral/hyperspectral images and LiDAR data. Remote Sens. Environ. 2012, 123, 258–270. [Google Scholar] [CrossRef]
- Ørka, H.O.; Dalponte, M.; Gobakken, T.; Næsset, E.; Ene, L.T. Characterizing forest species composition using multiple remote sensing data sources and inventory approaches. Scand. J. For. Res. 2013, 28, 677–688. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Shen, X.; Cao, L. Tree-species classification in subtropical forests using airborne hyperspectral and LiDAR data. Remote Sens. 2017, 9, 1180. [Google Scholar] [CrossRef] [Green Version]
- Radecka, A.; Michalska-Hejduk, D.; Osińska-Skotak, K.; Kania, A.; Górski, K.; Ostrowski, W. Mapping secondary succession species in agricultural landscape with the use of hyperspectral and ALS data. J. Appl. Remote Sens. 2019, 13, 034502. [Google Scholar] [CrossRef]
- Osińska-Skotak, K.; Radecka, A.; Piórkowski, H.; Michalska-Hejduk, D.; Kopeć, D.; Tokarska-Guzik, B.; Ostrowski, W.; Kania, A.; Niedzielko, J. Mapping succession on agricultural areas by means of remote sensing: Is the data acquisition time critical for species discrimination? Remote Sens. 2019, 11, 2629. [Google Scholar] [CrossRef] [Green Version]
- Laserdata GmbH. 2017. Available online: www.laserdata.atm (accessed on 26 July 2020).
- Sterenczak, K.; Moskalik, T. Use of LIDAR-based digital terrain model and single tree segmentation data for optimal forest skid trail network. IForest Biogeosci. For. 2014, 8, 661. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Guo, Q.; Jakubowski, M.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. PE&RS 2012, 78, 75–84. [Google Scholar]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland using Small Footprint LIDAR data. PE&RS 2006, 72, 923–932. [Google Scholar] [CrossRef] [Green Version]
- Miltiadou, M.; Warren, M.A.; Grant, M.; Brown, M. Alignment of Hyperspectral Imagery and full-waveform LiDAR data for visualisation and classification purposes. In Proceedings of the 36th International Symposium of Remote Sensing of the Environment, Berlin, Germany, 11 May 2015. [Google Scholar]
- Zlinszky, A.; Deák, B.; Kania, A.; Schroiff, A.; Pfeifer, N. Biodiversity mapping via natura 2000 conservation status and EBV assessment using airborne laser scanning in alkali grasslands. ISPRS Arch. 2016, 41, 1293. [Google Scholar]
- Osińska-Skotak, K.; Bakuła, K.; Jełowicki, Ł.; Michalska-Hejduk, D.; Wylazłowska, J.; Kopeć, D. Using archival aerial photos in the assessment of secondary succession process. In Proceedings of the 38th Annual EARSeL Symposium: Earth Observation Supporting Sustainability Research, Chania, Crete, Greece, 9–12 July 2018. [Google Scholar]
- Górski, K.; Ostrowski, W.; Kania, A.; Ochtyra, A.; Kopeć, D.; Pilarska, M.; Osińska-Skotak, K.; Sławik, Ł. Influence of ALS point cloud classification on results of pixel-based non-forest species classification with ALS and hyperspectral data. In Proceedings of the 37th EARSeL Symposium: Smart Future with Remote Sensing, Prague, Czech Republic, 27–30 June 2017. [Google Scholar]
- Osińska-Skotak, K.; Radecka, A.; Niedzielko, J.; Kopeć, D.; Michalska-Hejduk, D.; Tokarska-Guzik, B.; Kania, A.; Górski, K.; Ostrowski, W.; Sławik, Ł.; et al. The Importance of Remote Sensing Data Spatial Resolution in Mapping Vegetation Succession Species on Non-forest Natura 2000 Protected Areas. In Proceedings of the 38th EARSeL Symposium: Earth Observation Supporting Sustainability Research, Chania, Crete, Greece, 9–12 July 2018. [Google Scholar]
- Radecka, A.; Osińska-Skotak, K.; Piórkowski, H.; Kania, A.; Ostrowski, W.; Górski, K.; Niedzielko, J.; Sławik, Ł.; Borzuchowski, J. The research into the critical botanical factors affecting the effectiveness of succession species mapping on the example of Wydmy Lucynowsko-Mostowieckie Natura 2000 protected area (PLH140013). In Proceedings of the Sixth International Conference on Remote Sensing and Geoinformation of Environment, Paphos, Cyprus, 26–29 March 2018. [Google Scholar]
- Osińska-Skotak, K.; Radecka, A.; Michalska-Hejduk, D.; Kopeć, D.; Wylazłowska, J.; Kania, A.; Ostrowski, W.; Niedzielko, J.; Sławik, Ł.; Borzuchowski, J. 218c. Wpływ okresu fenologicznego na skuteczność klasyfikacji gatunków drzew i krzewów. In Proceedings of the XXIII Ogólnopolska Konferencja Fotointerpretacji i Teledetekcji, Łódź, Poland, 24–25 September 2018. [Google Scholar]
- Green, A.A.; Berman, M.; Switzer, P.; Craig, M.D. A transformation for ordering multispectral data in terms of image quality with implications for noise removal. IEEE Trans. Geosci. Remote Sens. 1988, 26, 65–74. [Google Scholar] [CrossRef] [Green Version]
- Sławik, Ł.; Niedzielko, J.; Kania, A.; Piórkowski, H.; Kopeć, D. Multiple flights or single flight instrument fusion of hyperspectral and ALS data? A comparison of their performance for vegetation mapping. Remote Sens. 2019, 11, 970. [Google Scholar] [CrossRef] [Green Version]
- Eysn, L.; Hollaus, M.; Schadauer, K.; Pfeifer, N. Forest delineation based on airborne LIDAR data. Remote Sens. 2012, 4, 762–783. [Google Scholar] [CrossRef] [Green Version]
- Mróz, W. Monitoring Siedlisk Przyrodniczych. Przewodnik Metodyczny. Część II [Natura 2000 Habitat Monitoring. Methodical Guide. Part II]; Biblioteka Monitoringu Środowiska, GIOŚ: Warsaw, Poland, 2012. [Google Scholar]
- Michalska-Hejduk, D. Kierunki sukcesji wtórnej w zbiorowiskach nieleśnych Kampinoskiego Parku Narodowego. Acta Bot. Warm. Masuriae 2007, 4, 95–104. [Google Scholar]
- Guyon, I.; Weston, J.; Barnhill, S.; Vapnik, V. Gene selection for cancer classification using support vector machines. Mach. Learn. 2002, 46, 389–422. [Google Scholar] [CrossRef]
- Breiman, L. Random forest. Mach. Learn. 2001, 45, 1–33. [Google Scholar] [CrossRef]
- Van der Maaten, L.J.P.; Hinton, G.E. Visualizing high-dimensional data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Straub, C.; Weinacker, H.; Koch, B. A fully automated procedure for delineation and classification of forest and non-forest vegetation based on full waveform laser scanner data. ISPRS Arch. 2008, 37, 1013–1019. [Google Scholar]
- Hill, R.A.; Wilson, A.K.; George, M.; Hinsley, S.A. Mapping tree species in temperate deciduous woodland using time-series multi-spectral data. Appl. Veg. Sci. 2010, 13, 86–99. [Google Scholar] [CrossRef]
- Hovi, A.; Raitio, P.; Rautiainen, M. A spectral analysis of 25 boreal tree species. Silva Fenn. 2017, 51, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Pasquarella, V.J.; Holden, C.E.; Woodcock, C.E. Improved mapping of forest type using spectral-temporal Landsat features. Remote Sens. Environ. 2018, 210, 193–207. [Google Scholar] [CrossRef]
- Grabska, E.; Hostert, P.; Pflugmacher, D.; Ostapowicz, K. Forest stand species mapping using the Sentinel-2 time series. Remote Sens. 2019, 11, 1197. [Google Scholar] [CrossRef] [Green Version]
- Mickelson, J.G.; Civco, D.L.; Silander, J.A. Delineating forest canopy species in the northeastern United States using multi-temporal TM imagery. PE&RS 1998, 64, 891–904. [Google Scholar]
- Key, T.; Warner, T.A.; McGraw, J.B.; Fajvan, M.A. A comparison of multispectral and multitemporal information in high spatial resolution imagery for classification of individual tree species in a temperate hardwood forest. Remote Sens. Environ. 2001, 75, 100–112. [Google Scholar] [CrossRef]
- Dymond, C.C.; Mladenoff, D.J.; Radeloff, V.C. Phenological differences in Tasseled Cap indices improve deciduous forest classification. Remote Sens. Environ. 2002, 80, 460–472. [Google Scholar] [CrossRef]
- Richter, R.; Reu, B.; Wirtha, C.; Doktor, D.; Vohland, M. The use of airborne hyperspectral data for tree species classification in a species-rich Central European forest area. Int. J. Appl. Earth Observ. Geoinform. 2016, 52, 464–474. [Google Scholar] [CrossRef]
- Hościło, A.; Lewandowska, A. Mapping forest type and tree species on a regional scale using multi-temporal Sentinel-2 Data. Remote Sens. 2019, 11, 929. [Google Scholar] [CrossRef] [Green Version]









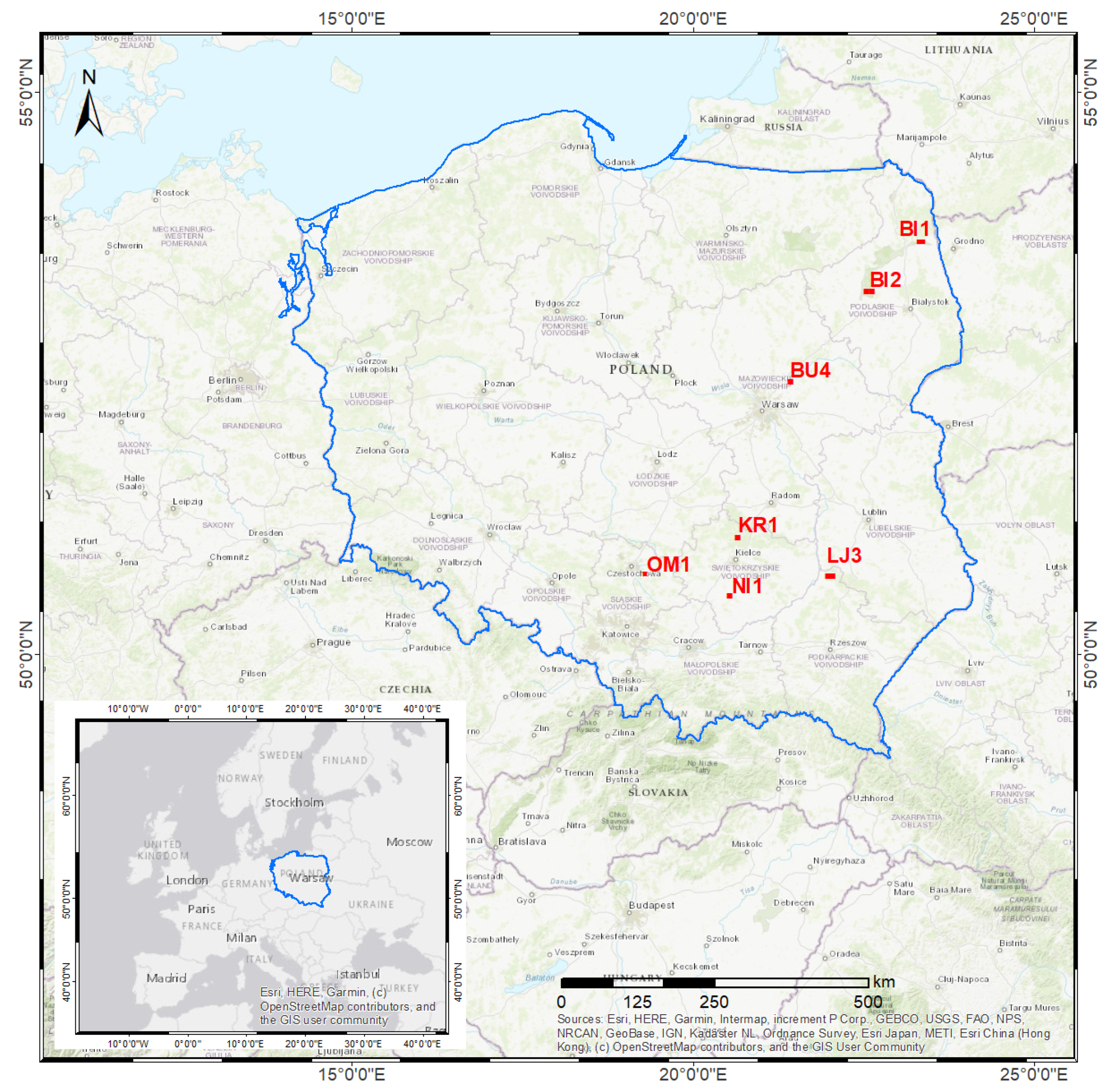
| Natura 2000 Site (Code) | Acronym | Geographical Coordinates | Type of Natura 2000 Habitat Studied (Code) | Succession Species |
|---|---|---|---|---|
| Biebrza River Valley (PLH200008) | BI2, BI2 | 53°17′10″N; 22°37′45″E | Alkaline fens (7230) | Alnus glutinosa, Betula pubescens, Salix cinerea, Salix aurita, Salix rosmarinifolia |
| Lucynów-Mostówka Inland Dunes (PLH140013) | BU4 | 52°35′34″N; 21°27′30″E | European dry heaths (4030) | Pinus sylvestris, Betula pendula, Populus tremula, Prunus serotina |
| Nidziańska Refuge (PLH26003) | NI1 | 50°32′14″N; 20°30′42″E | Semi-natural dry grasslands and scrubland facies on calcareous substrates (Festuco-Brometalia) (6210) | Pinus sylvestris, Prunus spinosa, Rosa canina |
| Krasna Valley (PLH260001) | KR1 | 51°05′45″N; 20°37′00″E | European dry heaths (4030); Species-rich Nardus grasslands on siliceous substrates in mountain areas (6230); Molinia meadows on calcareous, peaty or clayey, silt-laden soils (Molinion caeruleae) (6410) | Salix cinerea, Salix aurita, Frangula alnus, Betula pendula, Pinus sylvestris |
| Janowskie Forests Ranges (PLH060031) | LJ3 | 50°43′0″N; 22°0′0″E | European dry heaths (4030); Transition mires and quaking bogs (7140) | Quercus robur, Populus tremula, Betula pendula, Betula pubescens, Pinus sylvestris |
| Olsztynsko-Mirowska Refuge (PLH240015) | OM1 | 50°0′45″N; 19°0′17″E | Xeric sand calcareous grasslands (Koelerion glaucae) (6120); Semi-natural dry grasslands and scrubland facies on calcareous substrates (Festuco-Brometalia) (6210) | Pinus sylvestris, Juniperus communis, Betula pendula, Prunus spinosa, Rhamnus cathartica, Crataegus spp., Cornus sanguinea, Corylus avellana |
| Technical Parameters | Sensor Type | ||
|---|---|---|---|
| Airborne Laser Scanner (FWF) | Hyperspectral Camera HySpex | ||
| Riegl LMS-Q680i | VNIR-1800 | SWIR-384 | |
| Flight altitude AGL [m] | 500 | ||
| Point density [pt/m2] | 7 | - | - |
| Spatial resolution [m] | - | 0.5 | 1 |
| Spectral resolution | 1.55 µm | 430 bands encompassing 0.4–2.4 µm spectral range | |
| Spectral sampling [nm] | - | 3.26 | 5.45 |
| FOV max [degrees] | 60 | 34 | 32 |
| Scan line overlap area [%] | 62.7 | 30 | 30 |
| Scan line overlap width [m] | 855 | 450 | 450 |
| Metric | Level of Threat | |||
|---|---|---|---|---|
| No | Small | Medium | High | |
| Percentage share of the area covered by patches of shrubs and trees within the grid [%] | <0–5) | (5;10> | (10;25> | >25 |
| The total length of the boundaries of patches of shrubs and trees within the grid in which the percentage of shrubs and trees is less than or equal to 95% [m] | <1 | <1;100> | (100;250> | >250 |
| Metric | Level of Threat | |||
|---|---|---|---|---|
| No | Small | Medium | High | |
| Percentage of the area of patches of shrubs and trees in the analysed habitat [%] | <0–1) | <1;10> | (10;25> | >25 |
| Average height of shrubs and trees in the analysed habitat [m] | - | <0;1> | (1;3> | >3 |
| Percentage share of succession species in the area of shrubs and trees (species of succession + other trees and shrubs species = 100%) in the analysed habitat | <0;5) | <5;30> | (30;60> | >60 |
| Metric | Level of Threat | |||
|---|---|---|---|---|
| No | Small | Medium | High | |
| Percentage of the area of patches of trees and shrubs in a buffer of 50 m from the border of the habitat [%] | <0–5) | <5;10> | (10;50> | >50 |
| Mean distance of the tree or shrub patch border to the border of the habitat in a buffer of 50 m from the habitat [m] | - | >25 | (10;25> | <0;10> |
| Percentage share of succession species in the area of shrubs and trees (species of succession + other trees and shrubs species = 100%) in a buffer of 50 m from the habitat | <0;5) | <5;30> | (30;60> | >60 |
| Metric Description | Level of Threat | |||
|---|---|---|---|---|
| No | Small | Medium | High | |
| Percentage increase in shrub and tree area per 5 years | <0;5) | <5;25> | (25;50> | >50 |
| Study Area | Natura 2000 Habitat Code | Height Threshold [m] |
|---|---|---|
| Biebrza River Valley | 7230 | 1.5 |
| Biebrza River Valley | 7230 | 0.8 |
| Biebrza River Valley | 7140 | 0.8 |
| Janowskie Forests Ranges | 7140 | 1.0 |
| Janowskie Forests Ranges | 4030 | 0.3 |
| Lucynów-Mostówka Inland Dunes | 4030 | 1.0 |
| Krasna Valley | 6230 | 0.7 |
| Krasna Valley | 6410 | 0.7 |
| Olsztyńsko-Mirowska Refuge | 6120 | 0.3 |
| Olsztyńsko-Mirowska Refuge | 6210 | 0.3 |
| Nidziańska Refuge | 6210 | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Osińska-Skotak, K.; Radecka, A.; Ostrowski, W.; Michalska-Hejduk, D.; Charyton, J.; Bakuła, K.; Piórkowski, H. The Methodology for Identifying Secondary Succession in Non-Forest Natura 2000 Habitats Using Multi-Source Airborne Remote Sensing Data. Remote Sens. 2021, 13, 2803. https://doi.org/10.3390/rs13142803
Osińska-Skotak K, Radecka A, Ostrowski W, Michalska-Hejduk D, Charyton J, Bakuła K, Piórkowski H. The Methodology for Identifying Secondary Succession in Non-Forest Natura 2000 Habitats Using Multi-Source Airborne Remote Sensing Data. Remote Sensing. 2021; 13(14):2803. https://doi.org/10.3390/rs13142803
Chicago/Turabian StyleOsińska-Skotak, Katarzyna, Aleksandra Radecka, Wojciech Ostrowski, Dorota Michalska-Hejduk, Jakub Charyton, Krzysztof Bakuła, and Hubert Piórkowski. 2021. "The Methodology for Identifying Secondary Succession in Non-Forest Natura 2000 Habitats Using Multi-Source Airborne Remote Sensing Data" Remote Sensing 13, no. 14: 2803. https://doi.org/10.3390/rs13142803
APA StyleOsińska-Skotak, K., Radecka, A., Ostrowski, W., Michalska-Hejduk, D., Charyton, J., Bakuła, K., & Piórkowski, H. (2021). The Methodology for Identifying Secondary Succession in Non-Forest Natura 2000 Habitats Using Multi-Source Airborne Remote Sensing Data. Remote Sensing, 13(14), 2803. https://doi.org/10.3390/rs13142803