
Multi-Bernoulli Tracking Approach for Occupancy Monitoring of Smart Buildings Using Low-Resolution Infrared Sensor Array


Abstract
:1. Introduction
2. Related Work and Contribution
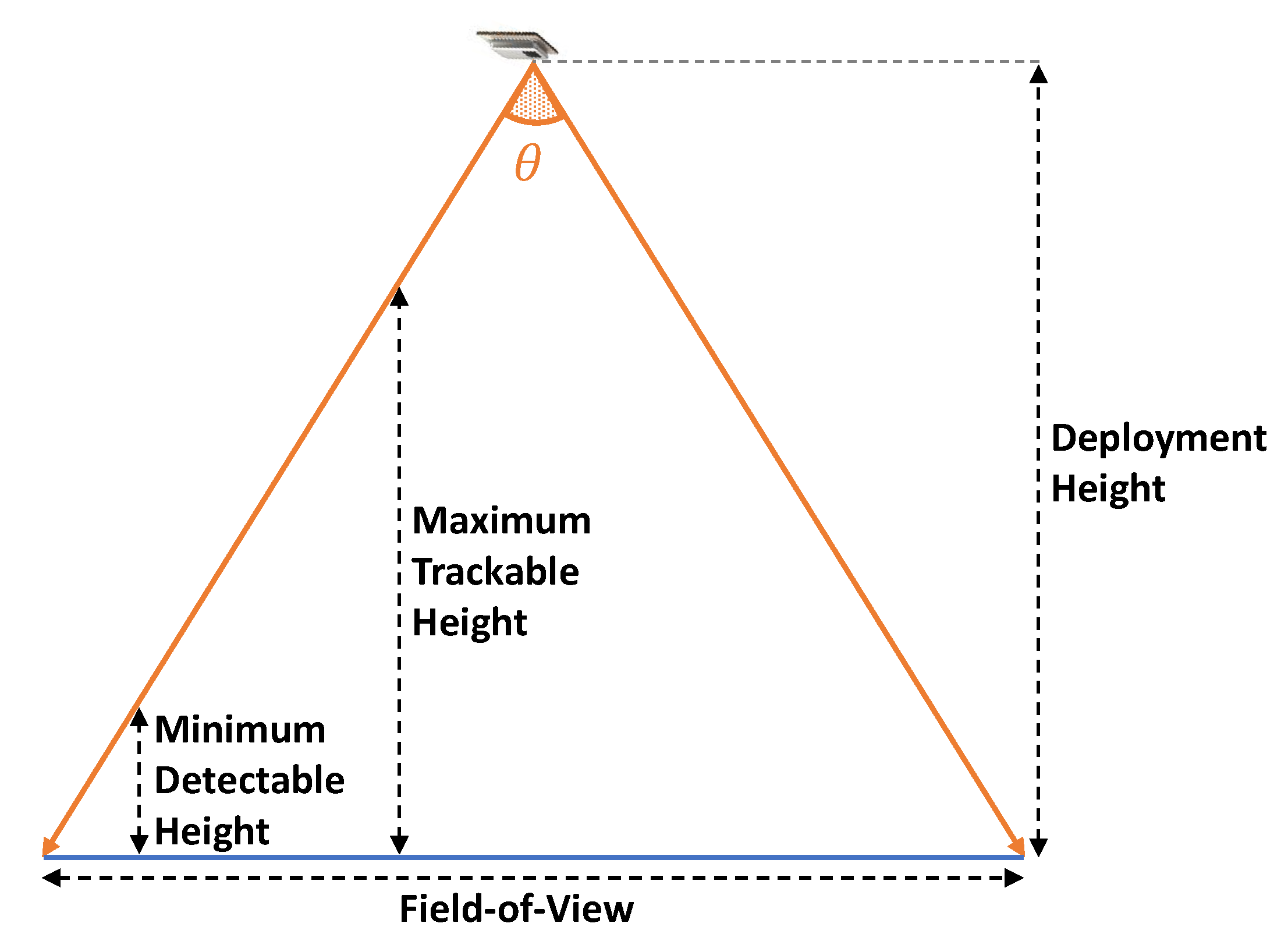
3. System Model
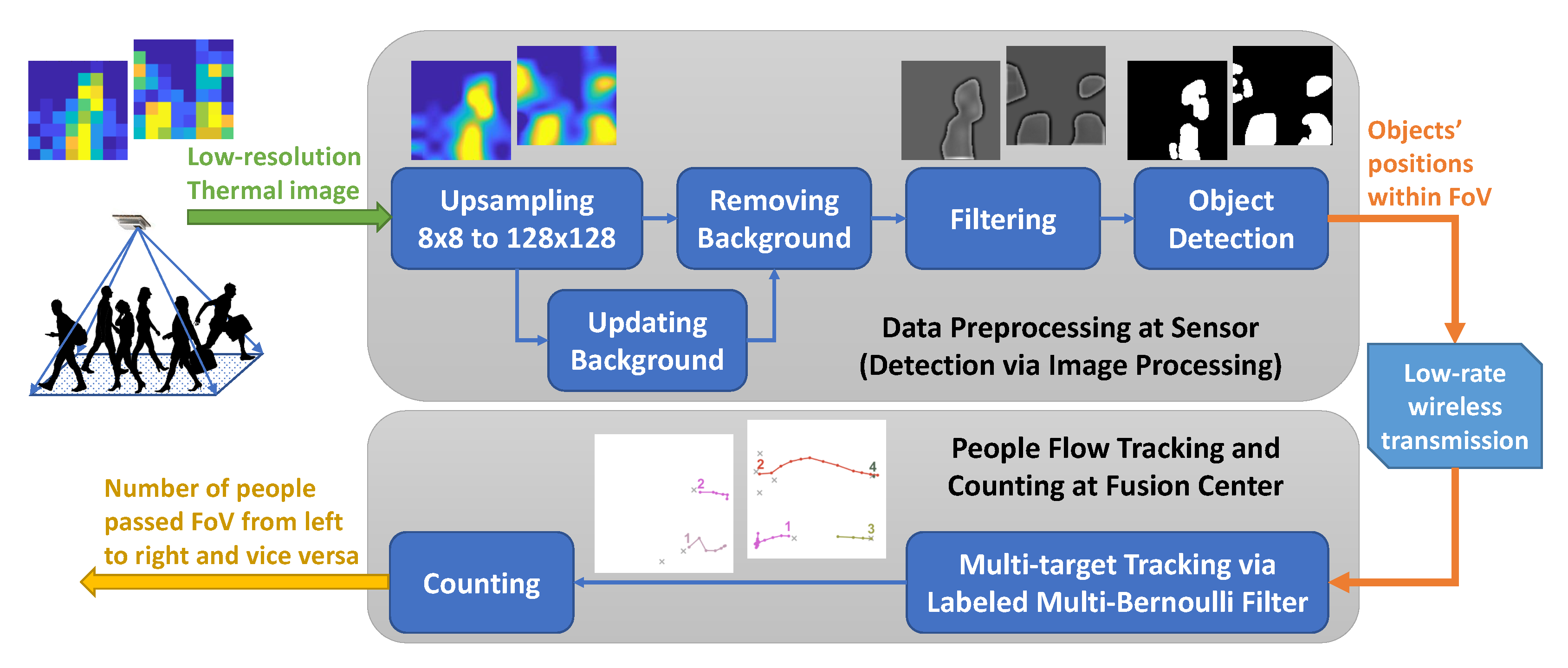
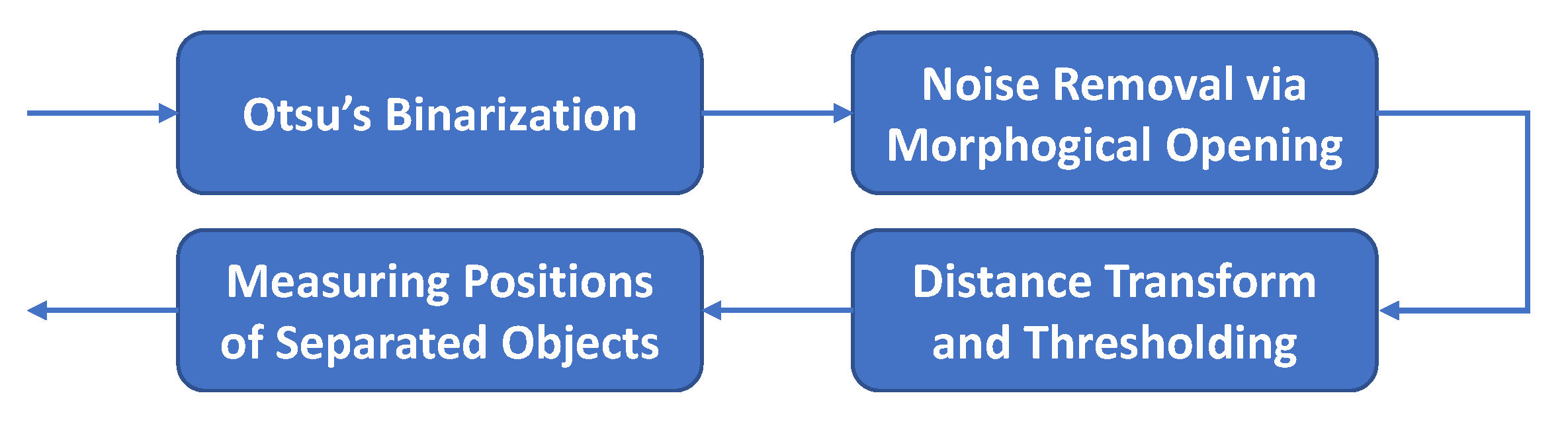
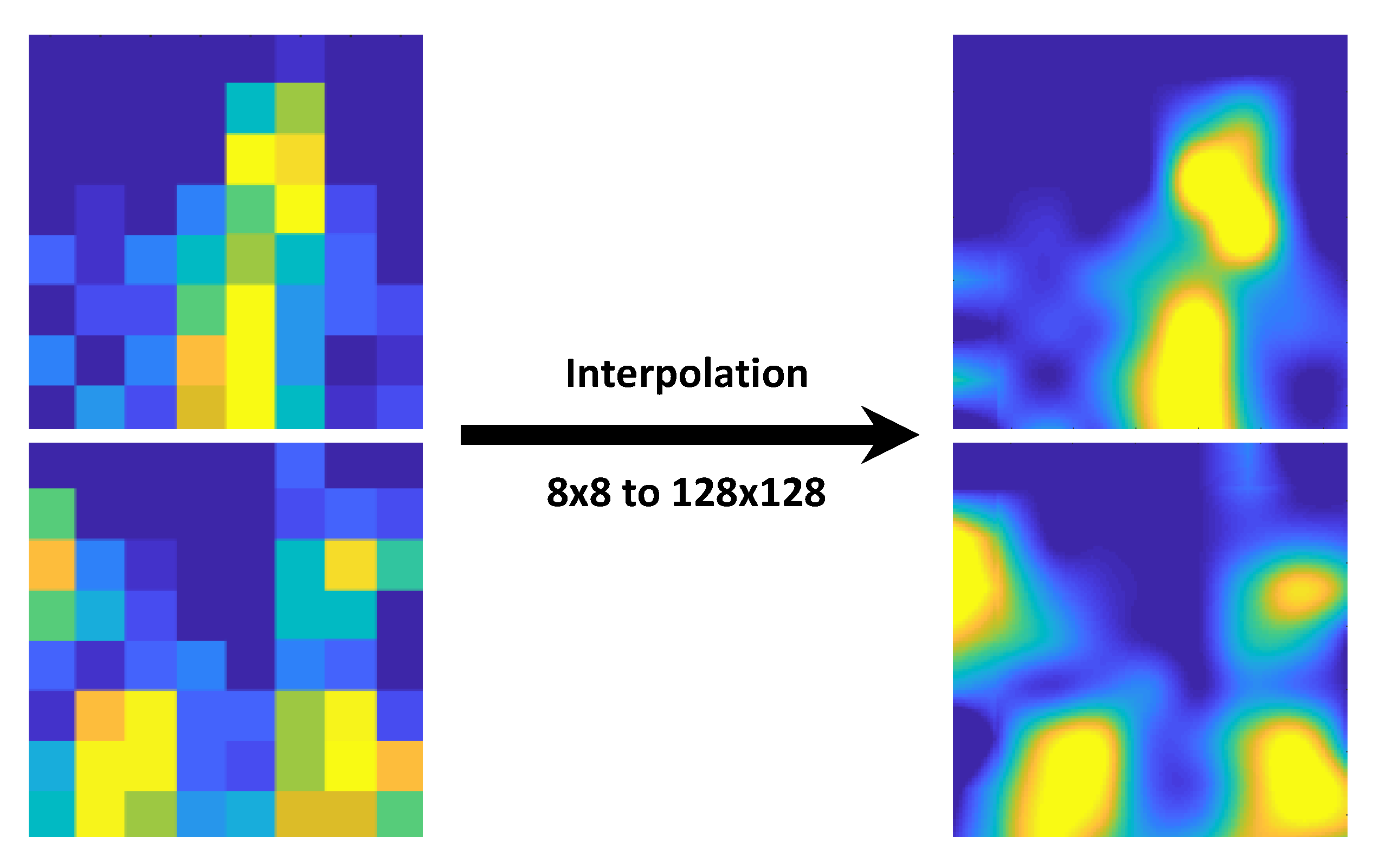
4. Target Detection via Image Processing
5. Multi-Target Tracking
5.1. Labeled Multi-Bernoulli RFS
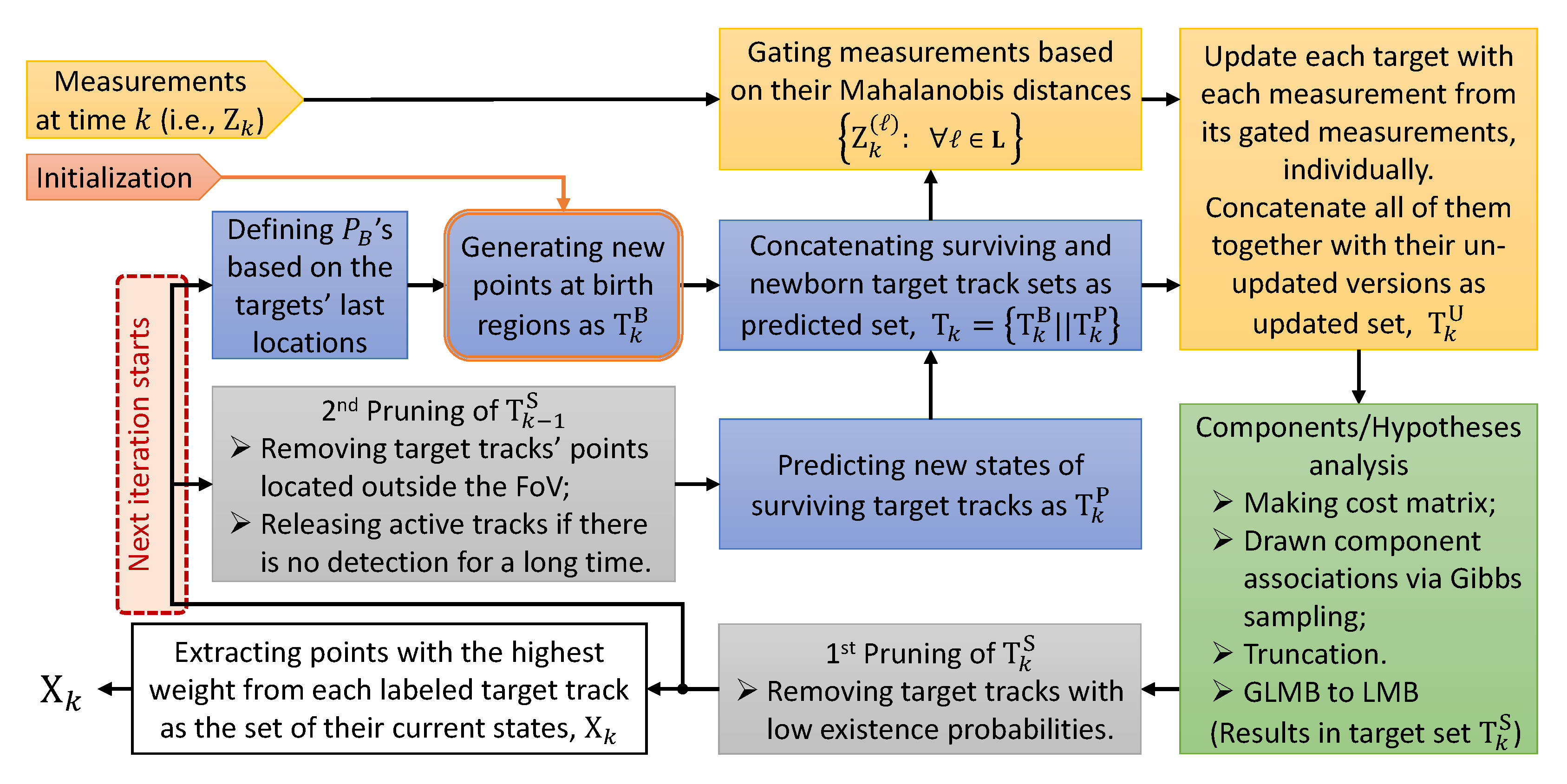
5.2. Tracking via Labeled Multi-Bernoulli Filter
| Algorithm 1: Prediction of the surviving targets. |
 |
| Algorithm 2: Update using gated observations. |
 |
5.3. Counting
5.4. Computational Complexity
6. Experimental Results
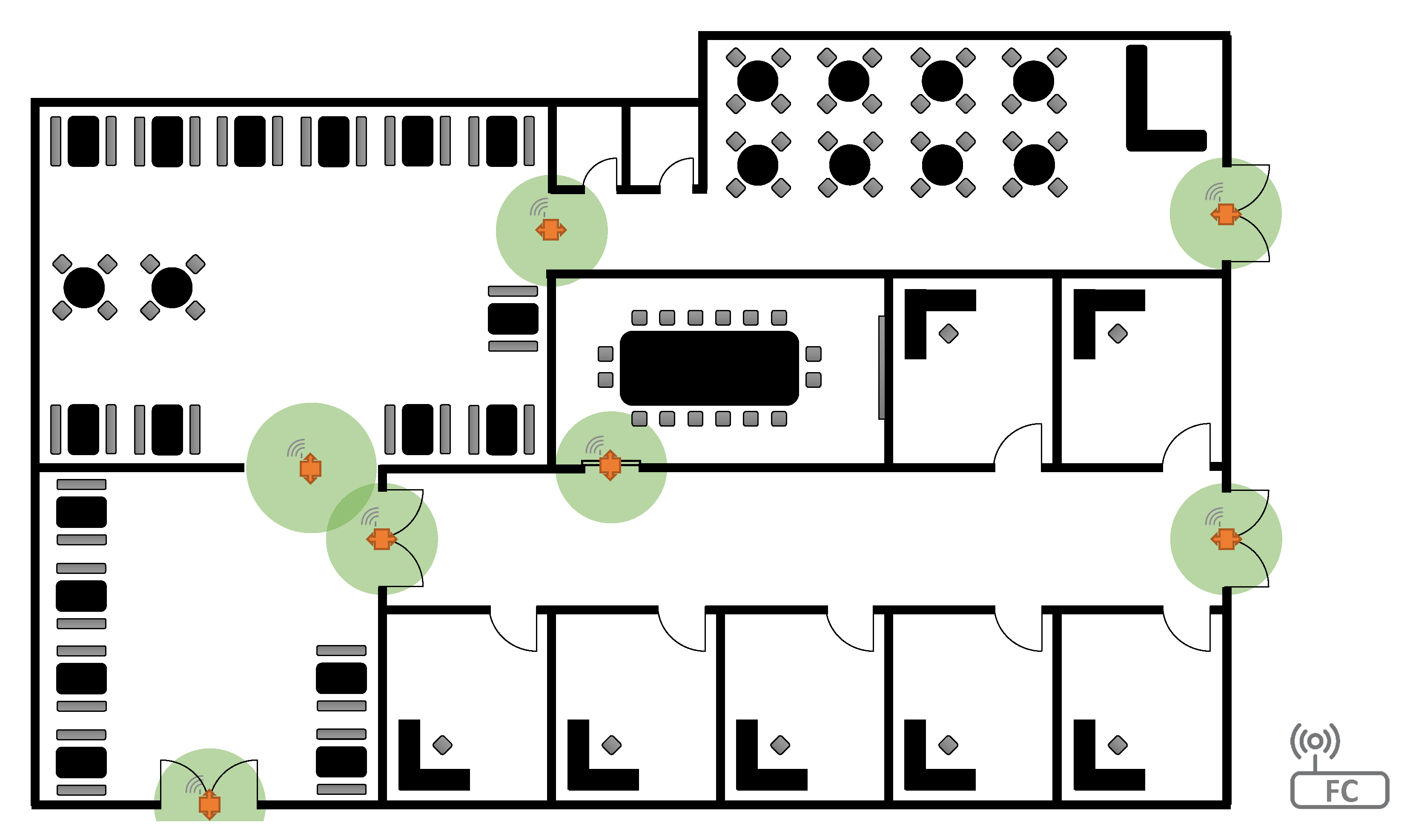
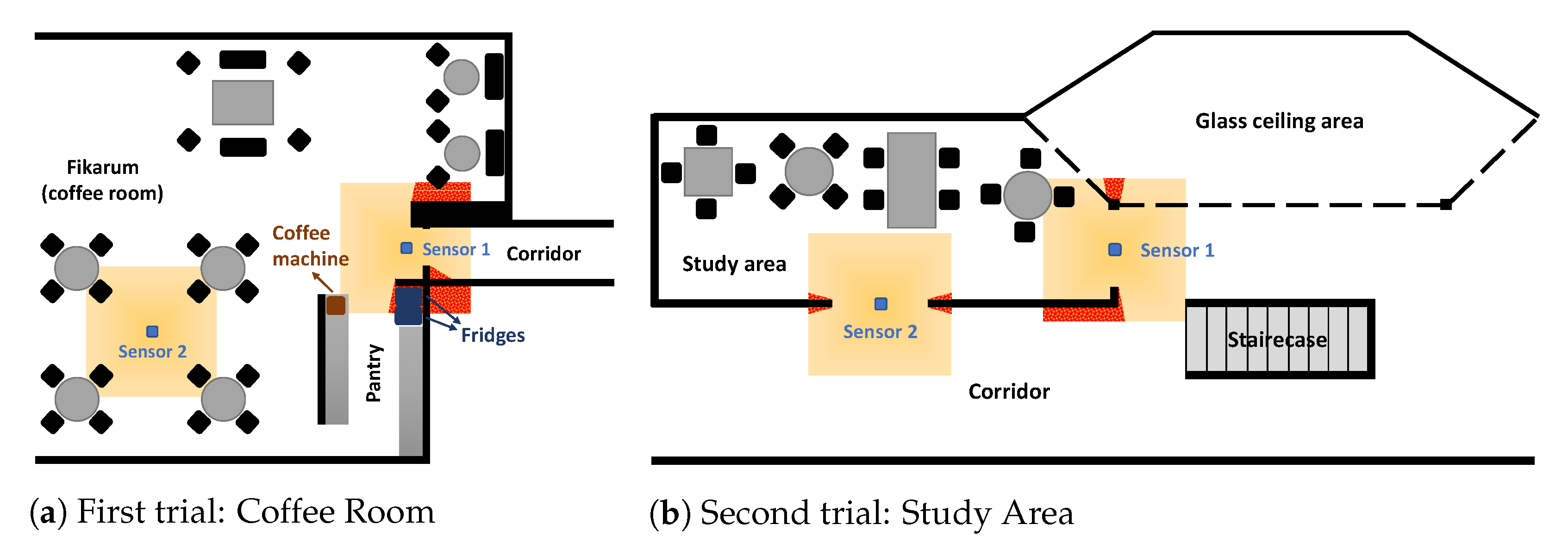
6.1. Coffee Room
- In general, the entry/exit rate is low with the maximum rate during the coffee breaks and lunch time;
- The light intensity of the coffee room was almost constant during the trial since it was lit only by lamps;
- Since the entrance door frame is narrow, users move in a row (when they are more than one) in the majority of the FoV. In the worst case, they may walk side-by-side after or before the entrance door.
6.2. Study Area
- The occupancy rate of this area is much higher than that of the coffee room;
- The entry/exit rate is also high;
- Some parts of the main corridor and area around the staircase are within the sensors’ FoV, where the movement is too high. Many people pass through those zones without entering or leaving the study area;
- A significant part of the study area is also within the sensors’ FoV. Many students may sit at FoV for a long time. This may increase the tracking error due to the higher clutters;
- Moreover, there is a glass ceiling area where the intensity of direct sun can interfere and reduce the detection ability of Sensor 1 as shown in Figure 11.
6.3. Nagoya-OMRON Dataset
- A sensor array from another manufacturer is used;
- The original resolution is a bit higher (16 × 16). However, it can still be categorized as the low-resolution IR images;
- They include both dark and light situations;
- In general, the thermal contrast of recorded IR images is lower which results in generating much higher clutters by the image processing part.
6.4. Processing Time
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AoI | Area of interest |
| AoV | Angle of view |
| CO2 | Carbon dioxide |
| DL | Deep learning |
| FC | Fusion center |
| fps | Frames per second |
| FoV | Field of view |
| GLMB | Generalized labeled multi-Bernoulli |
| HVAC | Heating, ventilation, and air conditioning |
| IoT | Internet-of-things |
| IR | Infrared |
| KF | Kalman filter |
| LMB | Labeled multi-Bernoulli |
| LoG | Laplacian of Gaussian |
| LoRaWAN | Long range wide-area network |
| LRIR | Low-resolution infrared |
| MTT | Multi-target tracking |
| NB-IoT | Narrow-band IoT |
| PHD | Probability hypothesis density |
| PIR | Passive infrared |
| RFS | Random finite set |
| RSO | Resident space object |
| SMC | Sequential Monte Carlo |
| WSN | Wireless sensor network |
References
- Beltran, A.; Erickson, V.L.; Cerpa, A.E. ThermoSense: Occupancy Thermal Based Sensing for HVAC Control. In Proceedings of the 5th ACM Workshop on Embedded Systems For Energy-Efficient Buildings, Rome, Italy, 14–15 November 2013; ACM: New York, NY, USA, 2013. [Google Scholar]
- Cao, N.; Ting, J.; Sen, S.; Raychowdhury, A. Smart Sensing for HVAC Control: Collaborative Intelligence in Optical and IR Cameras. IEEE Trans. Ind. Electr. 2018, 65, 9785–9794. [Google Scholar] [CrossRef]
- Yang, Z.; Li, N.; Becerik-Gerber, B.; Orosz, M. A Multi-sensor Based Occupancy Estimation Model for Supporting Demand Driven HVAC Operations. In Proceedings of the 2012 Symposium on Simulation for Architecture and Urban Design, Orlando, FL, USA, 26–30 March 2012; Society for Computer Simulation International: San Diego, CA, USA, 2012; pp. 2:1–2:8. [Google Scholar]
- Papatsimpa, C.; Linnartz, J. Propagating sensor uncertainty to better infer office occupancy in smart building control. Energy Build. 2018, 179, 73–82. [Google Scholar] [CrossRef]
- Elkhoukhi, H.; NaitMalek, Y.; Berouine, A.; Bakhouya, M.; Elouadghiri, D.; Essaaidi, M. Towards a Real-time Occupancy Detection Approach for Smart Buildings. Procedia Comput. Sci. 2018, 134, 114–120. [Google Scholar] [CrossRef]
- Akkaya, K.; Guvenc, I.; Aygun, R.; Pala, N.; Kadri, A. IoT-based occupancy monitoring techniques for energy-efficient smart buildings. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015; pp. 58–63. [Google Scholar]
- Ekwevugbe, T.; Brown, N.; Fan, D. A design model for building occupancy detection using sensor fusion. In Proceedings of the 2012 6th IEEE International Conference on Digital Ecosystems and Technologies (DEST), Campione d′Italia, Italy, 18–20 June 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Sangoboye, F.C.; Kjærgaard, M.B. PLCount: A Probabilistic Fusion Algorithm for Accurately Estimating Occupancy from 3D Camera Counts. In Proceedings of the 3rd ACM International Conference on Systems for Energy-Efficient Built Environments, Palo Alto, CA, USA, 16–17 November 2016; ACM: New York, NY, USA, 2016; pp. 147–156. [Google Scholar] [CrossRef] [Green Version]
- Berger, M.; Armitage, A. Room occupancy measurement using low-resolution infrared cameras. In Proceedings of the IET Irish Signals and Systems Conference (ISSC 2010), Cork, Ireland, 23–24 June 2010; pp. 249–254. [Google Scholar] [CrossRef] [Green Version]
- Basu, C.; Rowe, A. Tracking Motion and Proxemics using Thermal-sensor Array. arXiv 2015, arXiv:1511.08166. [Google Scholar]
- Yuan, Y.; Li, X.; Liu, Z.; Guan, X. Occupancy Estimation in Buildings Based on Infrared Array Sensors Detection. IEEE Sens. J. 2020, 20, 1043–1053. [Google Scholar] [CrossRef]
- Mohammadmoradi, H.; Munir, S.; Gnawali, O.; Shelton, C. Measuring People-Flow through Doorways Using Easy-to-Install IR Array Sensors. In Proceedings of the 2017 13th International Conference on Distributed Computing in Sensor Systems (DCOSS), Ottawa, ON, Canada, 5–7 June 2017; pp. 35–43. [Google Scholar]
- Panasonic Industry. Infrared Array Sensor—Grid-EYE. Available online: https://eu.industrial.panasonic.com/products/sensors-optical-devices/sensors-automotive-and-industrial-applications/infrared-array (accessed on 6 August 2021).
- Carvalho, C.M.; Johannes, M.S.; Lopes, H.F.; Polson, N.G. Particle Learning and Smoothing. Stat. Sci. 2010, 25, 88–106. [Google Scholar] [CrossRef] [Green Version]
- Urteaga, I.; Bugallo, M.F.; Djurić, P.M. Sequential Monte Carlo methods under model uncertainty. In Proceedings of the 2016 IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Sun, J.; Zhou, H.; Xu, C. Group Target Tracking Based on MS-MeMBer Filters. Remote Sens. 2021, 13, 1920. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N. Labeled Random Finite Sets and Multi-Object Conjugate Priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Phung, D. Labeled Random Finite Sets and the Bayes Multi-Target Tracking Filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef] [Green Version]
- Javanmardi, M.; Qi, X. Visual tracking of resident space objects via an RFS-based multi-Bernoulli track-before-detect method. Mach. Vis. Appl. 2018, 29, 1191–1208. [Google Scholar] [CrossRef]
- Li, C.; Wang, W. Detection and Tracking of Moving Targets for Thermal Infrared Video Sequences. Sensors 2018, 18, 3944. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reuter, S.; Vo, B.T.; Vo, B.N.; Dietmayer, K. The Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Vo, B.N.; Vo, B.T.; Hung, H. An Efficient Implementation of the Generalized Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2017, 65, 1975–1987. [Google Scholar] [CrossRef] [Green Version]
- Shallari, I.; Krug, S.; O’Nils, M. Communication and computation inter-effects in people counting using intelligence partitioning. J. Real-Time Image Process. 2020, 17, 1869–1882. [Google Scholar] [CrossRef] [Green Version]
- Mahler, R.P.S. Statistical Multisource-Multitarget Information Fusion; Artech House, Inc.: Norwood, MA, USA, 2007. [Google Scholar]
- Elektroniksystem i Umeå AB (ELSYS). Elsys—ERS Eye. Available online: https://www.elsys.se/en/ers-eye/ (accessed on 10 December 2020).
- Panasonic Automotive & Industrial Systems Europe. Grid-EYE Characteristics (2020-10-15). Available online: https://industry.panasonic.eu/components/sensors/grid-eye (accessed on 10 December 2020).
- Freitas, R.A. Nanomedicine, Volume 1: Basic Capabilities; Landes Bioscience: Austin, TX, USA, 1999. [Google Scholar]
- Montgomery, L.D.; Williams, B.A. Effect of ambient temperature on the thermal profile of the human forearm, hand, and fingers. Ann. Biomed. Eng. 1976, 4, 209–219. [Google Scholar] [CrossRef] [PubMed]
- Kawanishi, Y. Nagoya University Extremely Low-Resolution FIR Image Action Dataset (Ver. 2018). Available online: https://www.murase.m.is.nagoya-u.ac.jp/~kawanishiy/en/datasets.html (accessed on 16 December 2020).
- Kawashima, T.; Kawanishi, Y.; Ide, I.; Murase, H.; Deguchi, D.; Aizawa, T.; Kawade, M. Action recognition from extremely low-resolution thermal image sequence. In Proceedings of the 14th IEEE International Conference on Advanced Video and Signal Based Surveillance, Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | IR Array Model | Resolution (pixels) | Height (m) | Rate (fps) | Image Filter | (%) | Min. Targets’ Distance (m) | Max. Trackable Height (m) | (m) | (m) | 1st Pruning Threshold (%) | 2nd Pruning Det. Gap (no. of Frames) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Coffee Room | Panasonic Grid-EYE | 8 × 8 | 8 | LoG | 98 | – | 2 | 1 | 7 | |||
| Study Area | ||||||||||||
| Nagoya-OMRON | OMRON D6T-1616L | 16 × 16 | 10 | LoG | 98 | – | 1 | 3 * |
| Scenario | Detection Accuracy | False Alarm |
|---|---|---|
| Coffee Room | 98 | <1% |
| Study Area | 86 | <1% |
| Nagoya-OMRON | 87 | 3% |
| Method | Controlled Environment | Uncontrolled Environment |
|---|---|---|
| Proposed Method | 98 | 87 |
| Doorway Method [12] | 96 | 90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rabiee, R.; Karlsson, J. Multi-Bernoulli Tracking Approach for Occupancy Monitoring of Smart Buildings Using Low-Resolution Infrared Sensor Array. Remote Sens. 2021, 13, 3127. https://doi.org/10.3390/rs13163127
Rabiee R, Karlsson J. Multi-Bernoulli Tracking Approach for Occupancy Monitoring of Smart Buildings Using Low-Resolution Infrared Sensor Array. Remote Sensing. 2021; 13(16):3127. https://doi.org/10.3390/rs13163127
Chicago/Turabian StyleRabiee, Ramtin, and Johannes Karlsson. 2021. "Multi-Bernoulli Tracking Approach for Occupancy Monitoring of Smart Buildings Using Low-Resolution Infrared Sensor Array" Remote Sensing 13, no. 16: 3127. https://doi.org/10.3390/rs13163127
APA StyleRabiee, R., & Karlsson, J. (2021). Multi-Bernoulli Tracking Approach for Occupancy Monitoring of Smart Buildings Using Low-Resolution Infrared Sensor Array. Remote Sensing, 13(16), 3127. https://doi.org/10.3390/rs13163127