
A Quick Band-to-Band Mis-Registration Detection Method for Sentinel-2 MSI Images


Abstract
:1. Introduction
2. Materials and Methods
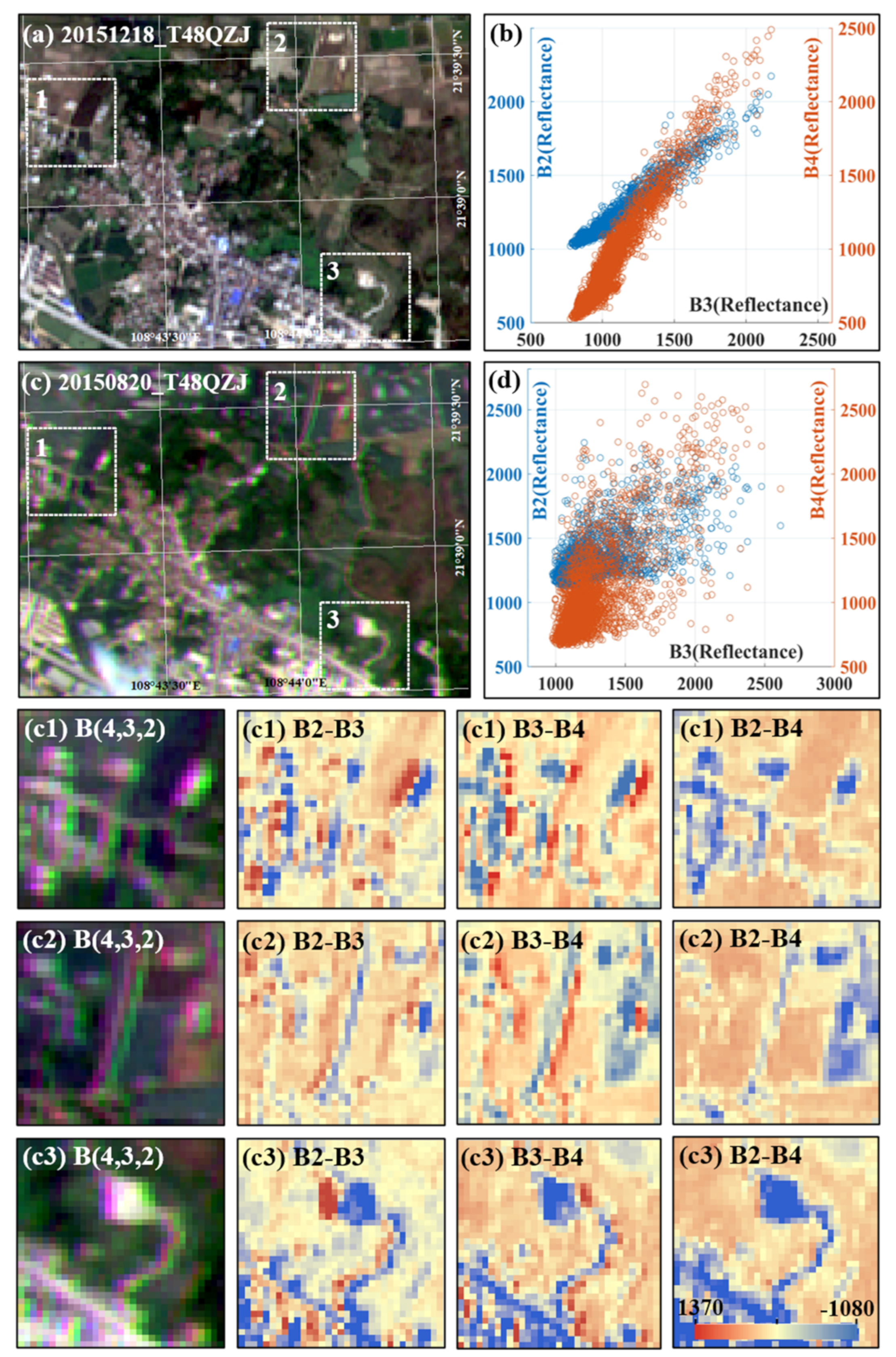
2.1. Characteristics of BBMR in MSI Images
2.2. Inter-Band Mis-Registration Detection Method
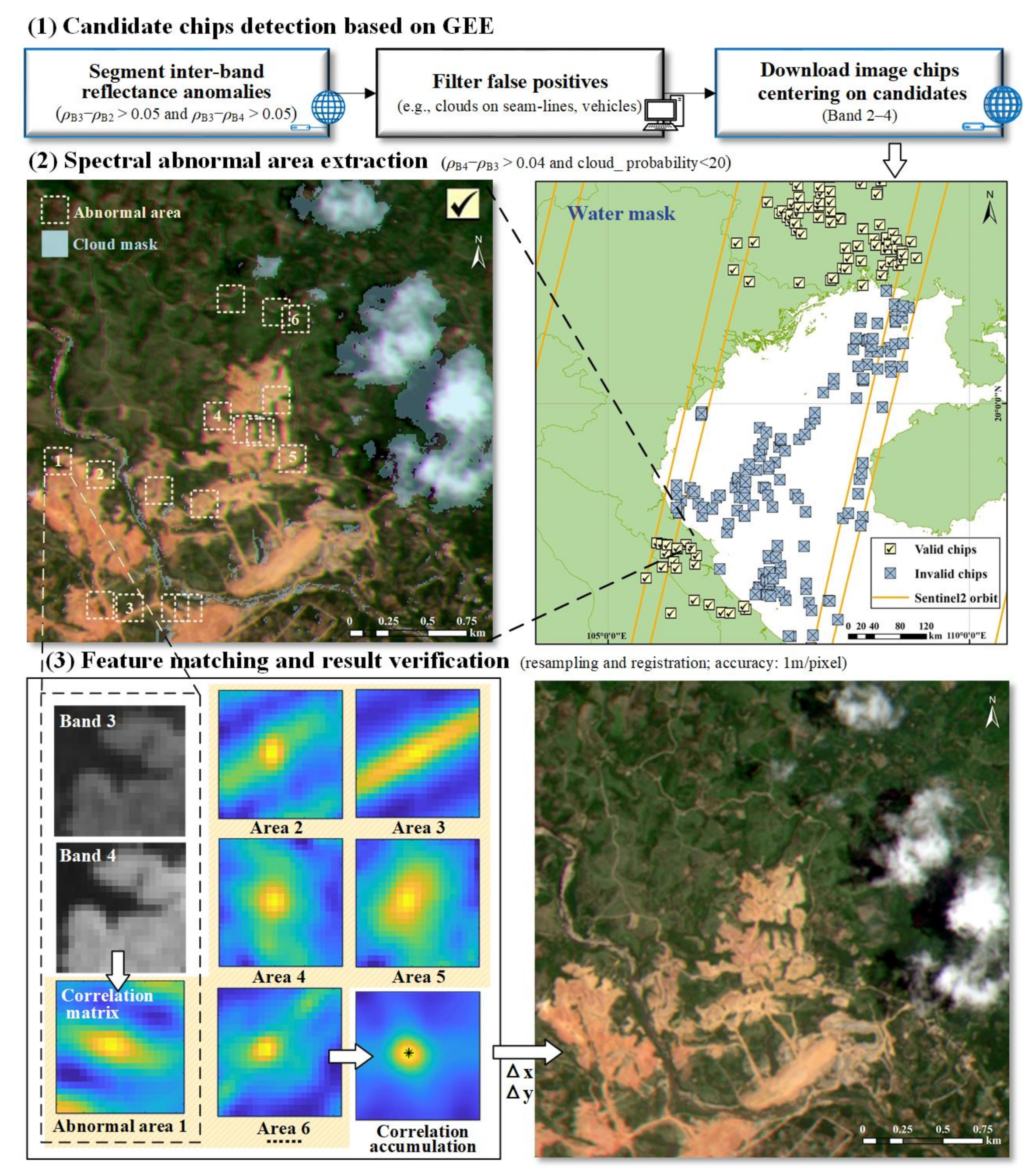
2.2.1. Candidate Chip Detection Based on GEE
2.2.2. Spectral Abnormal Area Extraction
- (i)
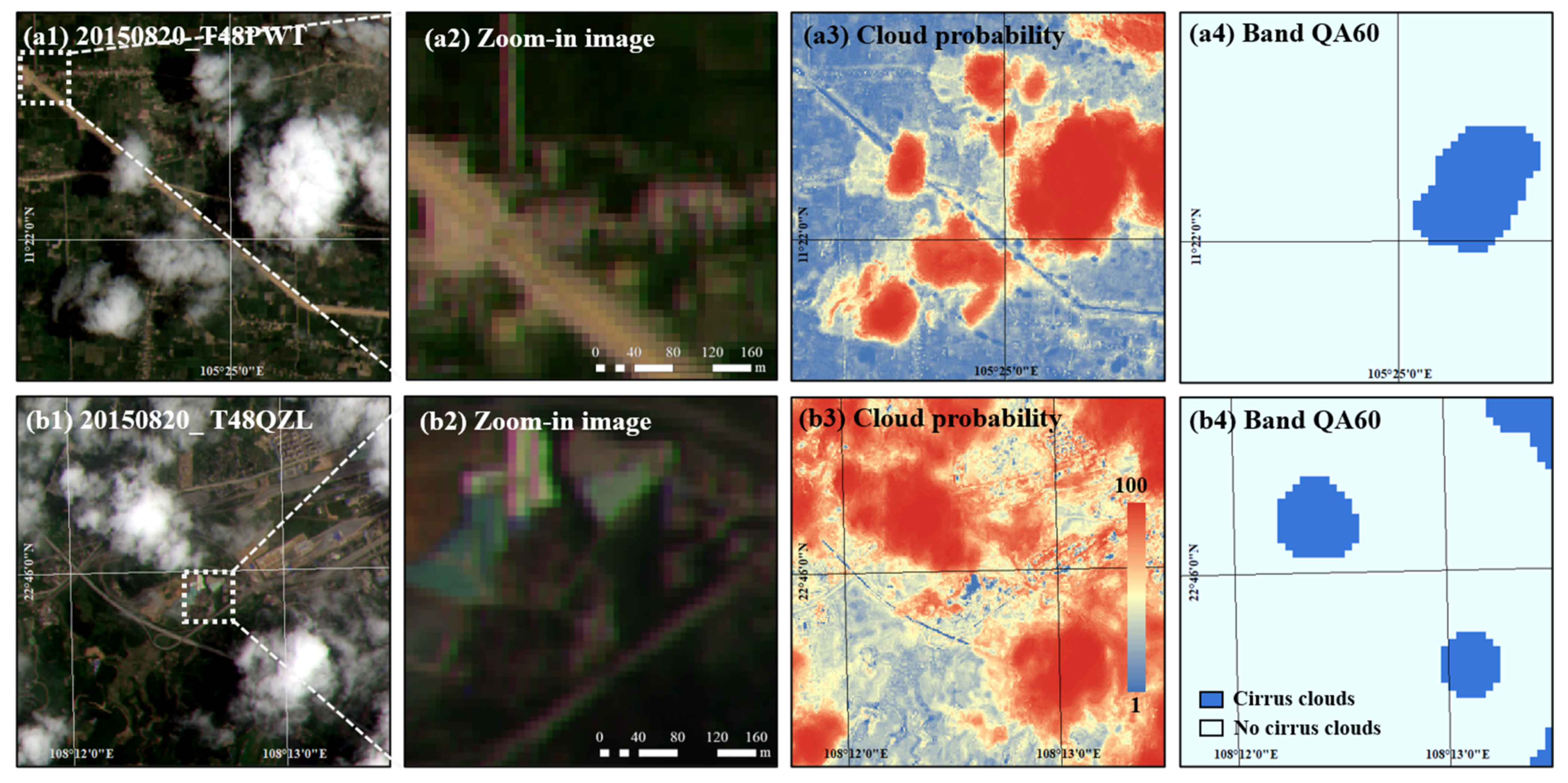
- Spectral feature extraction. Inside each image chip, the threshold of the abnormal spectral point needs to be expanded to extract more features in areas with relatively low heterogeneity. The spectral reflectance peak around the green light band that vegetation has may lead to false positives if we simply narrow the threshold using the same criterion as that applied during the detection of candidate chips. Instead, we focus on bright-magenta features (ρB4 − ρB3 > 0.04) that appear in pairs with green ones in order to avoid vegetation interference. Only focusing on the BBR of the surface objects in the experiment, the “rainbow” effect appearing at the edge of moving clouds also needs to be excluded to obtain more convincing candidate points. Our primary choice of cloud mask is the cloud probability product (10 m resolution) processed by the s2cloudless open-source algorithm on GEE, because it ensures data coverage, avoids image resampling, and has significant high confidence compared to Band QA60. In this experiment, points with cloud probability of >20% were removed from the candidates. Note that the thresholds were the optimal choices determined by trial-and-error analysis and succeeded in extracting reflectance anomalies in Band 3 of MSI images covering different backgrounds. Although the performance was supported by the experiment result, the transfer to other datasets may still need more tests for adjustment.
- (ii)
- A random sampling of abnormal spectral points. If the number of candidate points inside a chip is less than three, it will be filtered as an accidental error or a flying airplane; if the number is more than 24, the chip will be divided into a 3 × 4 grid for random sampling inside each grid in order to obtain a roughly geometrical uniform distribution of 24 points inside the chip. As the chips are downloaded centering on every abnormal area, we considered that the potential mis-registration inside a chip is spatial continuous in most cases. Therefore, this shrinks the computation complexity, while maintaining the main spectral feature.
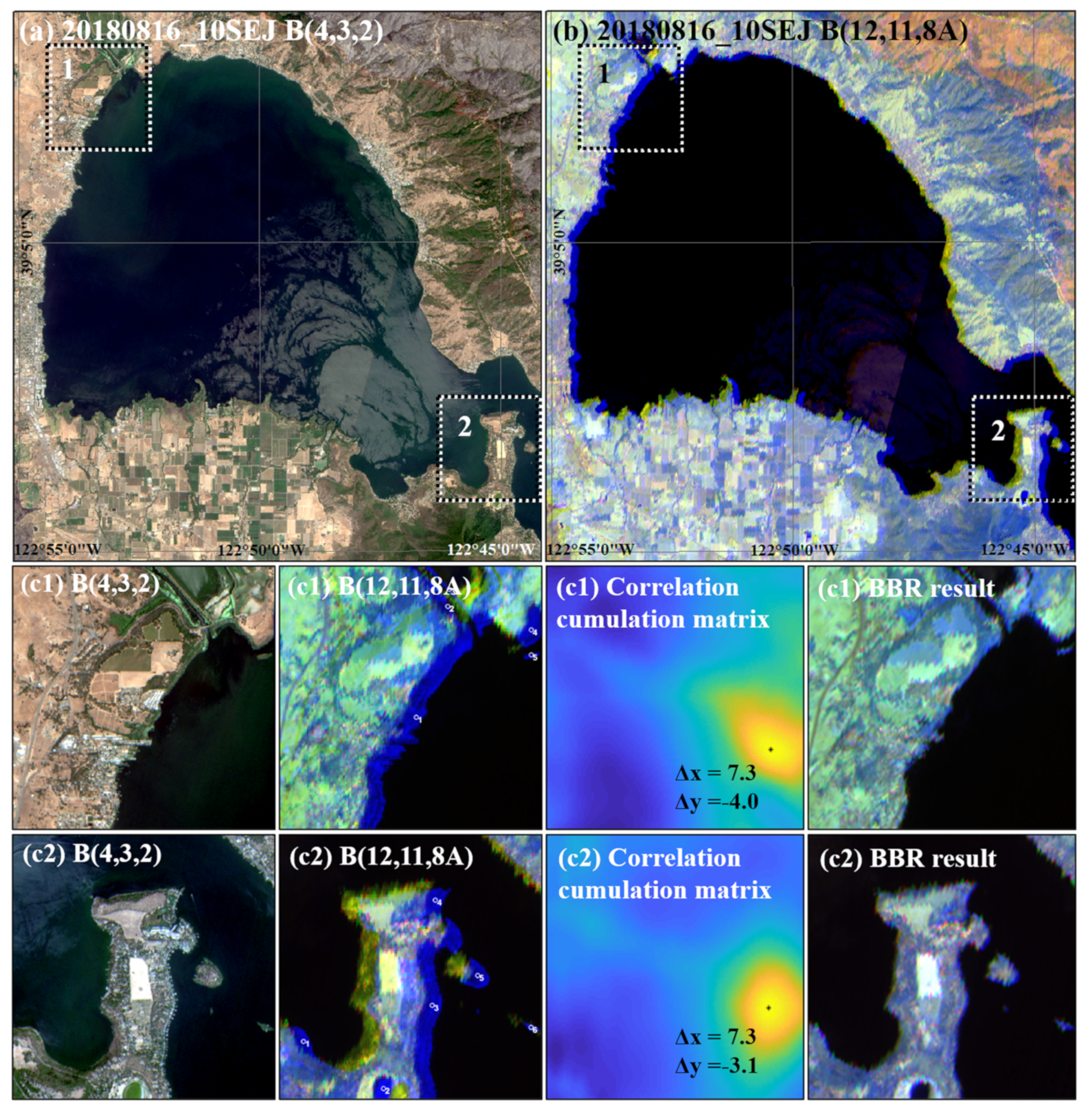
2.2.3. Feature Matching and Result Verification
3. Results
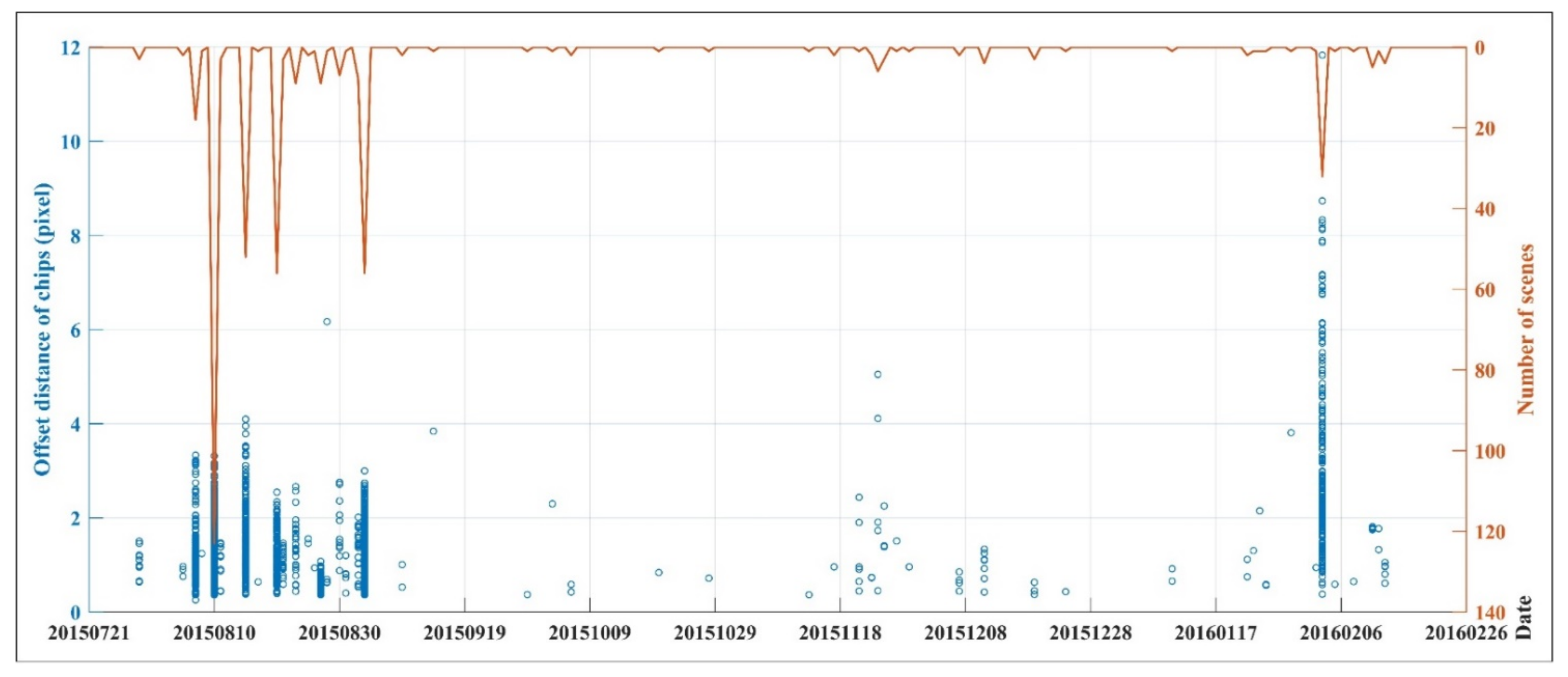
3.1. Detection Results
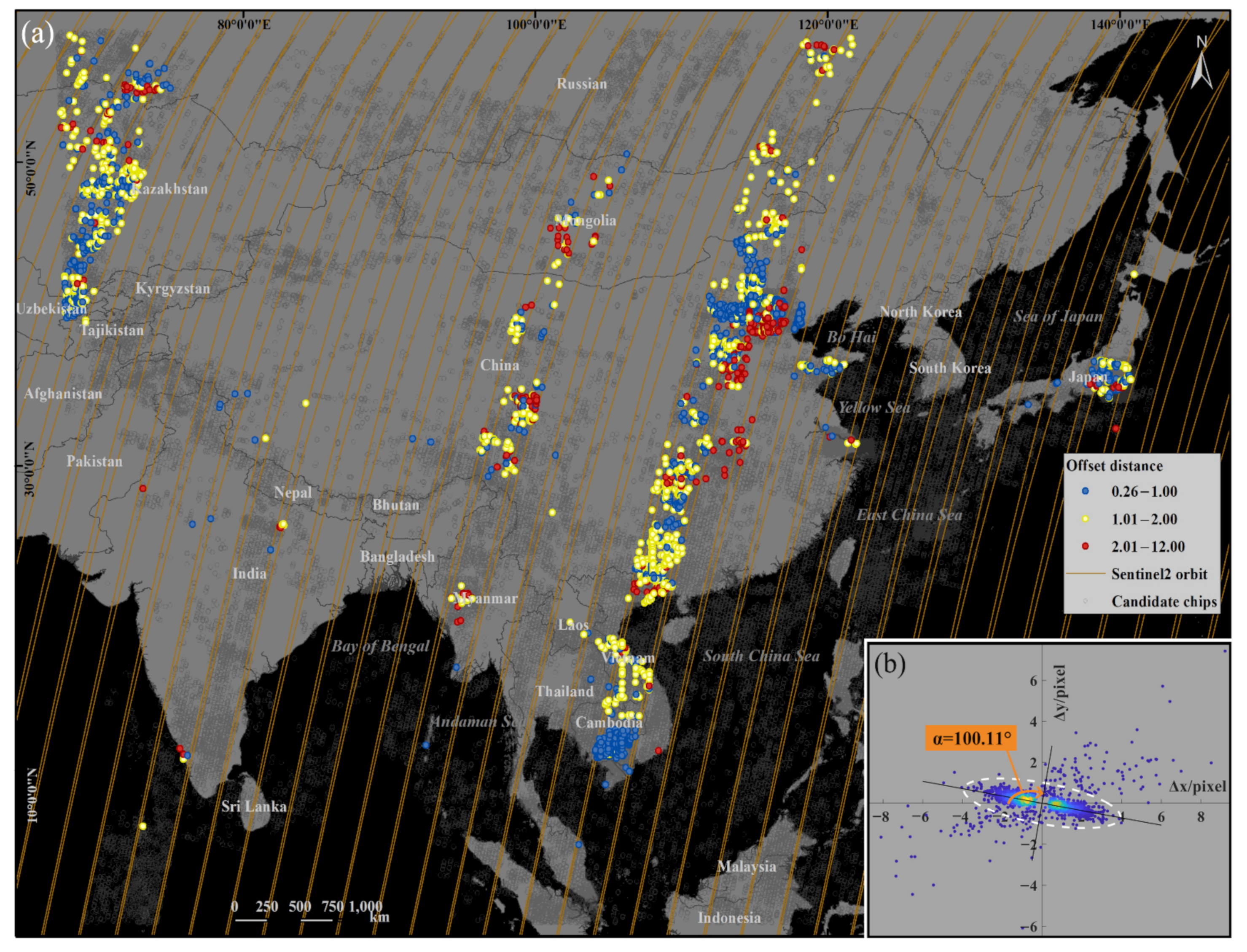
3.2. Spatial Distribution of Detected MSI Chips with BBMR
4. Discussion
4.1. Limitations
4.1.1. Limitations of Introducing Additional Data
- (i)
- Cloud masks. The machine-learning-based cloud detection product achieves much higher accuracy in cloud filtering than Band QA60 (Figure 6b,c). In some cases, however (Figure 6(b3)), it might show a false high probability in areas without clouds. This could lead to the omission of some significant abnormal spectral points, which in turn may affect the BBR accuracy. To guarantee the filtration of clouds in most chips, the threshold of the cloud probability cannot be set too low. Thus, we adjusted the threshold while eroding the edge of the logical operation matrix to lessen the mis-filtering of ground objects. For comparison, we used chips acquired on 15 August, 20 August (with multiple confirmed BBMRs), and 1 December 2015 (without BBMRs) as experimental data to test the effect of introducing the s2cloudless product (Table 1). While a few mis-detections appeared on 15 August and 20 August 2015, the number of false detections increased significantly, leading to a significant drop in accuracy from ~90% to ~40%. Meanwhile, all of the newly added detections were confirmed as false positives on 1 December 2015. This indicates that introducing a cloud mask leads to some mis-detections on days when images with known BBMR appear. However, in most cases (especially on days without confirmed BBMR images), the increment in detection accuracy was notable. Considering that BBMR is known to occur regularly (it tends to appear in multiple chips and scenes inside one day), missed detections will not greatly affect the general temporal tendency compared to the significant number of false positives that would be detected without the cloud mask. The crucial role that the mask plays in the filtration of moving clouds cannot currently be substituted. Thus, we regard this error as acceptable in the context of our experiment.
- (ii)
- Water masks. Although the movements of seam-lines and the edges of lakes and rivers did not represent notable differences in kilometer-scale TOA images, the global water map still could not filter all of the chips that were capturing water surfaces, as there were some inevitable errors during the process of rasterization and the resampling of the water shapefile data; these errors may affect the accuracy of water masking. If using the Sentinel water surface classification product, additional errors may also be caused by interpretations such as the cloud mask, which may bring about new problems. According to the results, the proportion of false-positive detections caused by water was extremely low (5 of 4363 chips, 0.11%), and we consider that it is of no great significance to introduce the water surface classification product to optimize the result.
4.1.2. The Limitation of Application in Exceptional Cases
- (i)
- Homogeneous areas. The main limitation of the proposed method is that it is based on the assumption that there is sufficient variance inside each chip and that there will be a unique and clear maximum in every correlation matrix, corresponding to the offsets between bands. However, areas such as deserts and grasslands, which have repetitive or almost homogeneous textures may have a rather low variance in a small image chip. This homogeneity could lead to an inaccurate offset direction. In our experiment, there were few image chips in which we could not distinguish the difference before and after BBR visually, due to a lack of discernable features outstanding from the image background. This indicates that the accumulation correlation matrix can mitigate the influence of homogeneous areas in most cases, and the false-positive results that arise occasionally will only have a slight impact on the detection accuracy.
- (ii)
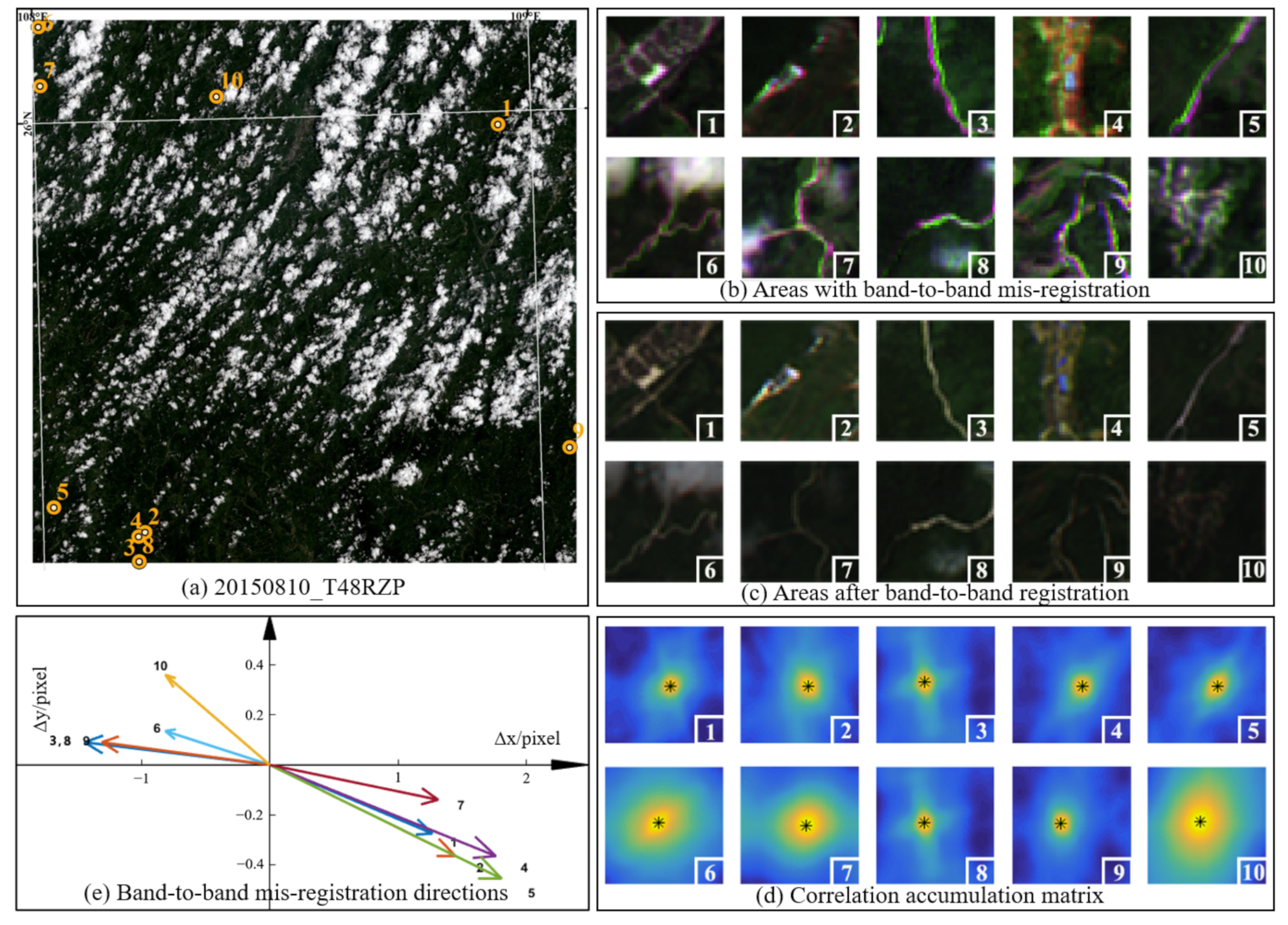
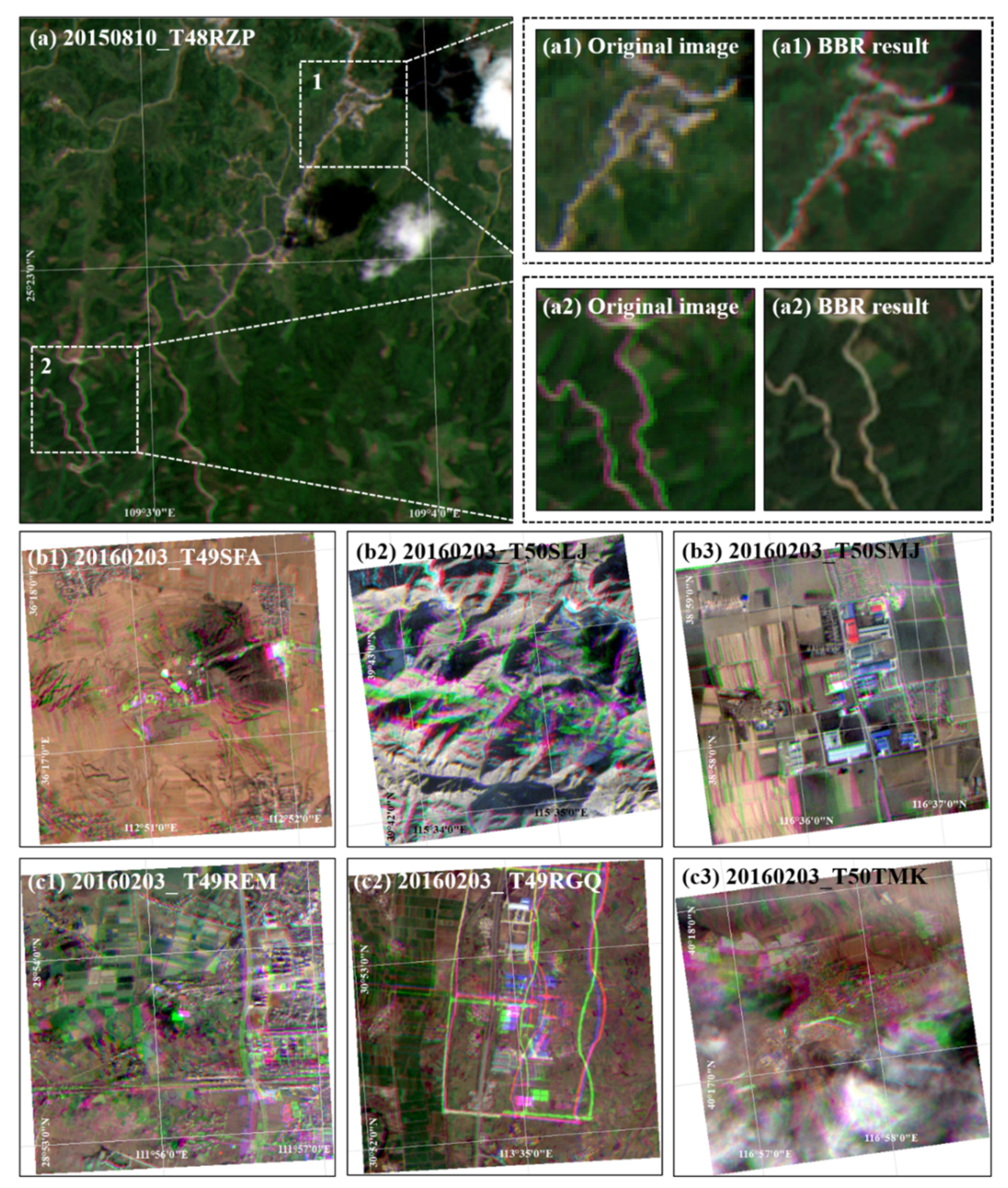
- Areas with complex inter-band offsets. Our method assumes that the feature of mis-registration between bands shows spatial consistency within the scale of one chip (301 × 301 pixels). However, the situation is much more complicated in practical terms. We found out that in some chips, both the range and the spatial features of the mis-registration could not fit the previously expected ideal state. These kinds of cases often show up in areas with obvious topographic relief in the experiment images. As shown in Figure 7a, although mis-registration was successfully detected and corrected in part of the chip (Figure 7(a2)), some areas (Figure 7(a1)) without visual errors showed new mis-registrations after registration. Segmenting chips into smaller regions or re-performing a spectral anomaly detection on the image after BBR may filter this kind of error.
4.1.3. Limitations of the Image Dataset
4.2. Transferability to Other MSI Bands
4.3. Comparison with Existed BBMR Detection Method
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fang, Z.; Cao, C.; Jiang, W.; Ji, W.; Xu, M.; Lu, S. Multi-Spectral Image Inter-Band Registration Technology Research. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 4287–4290. [Google Scholar]
- Xie, Y.; Xiong, X.; Qu, J.J.; Che, N.; Wang, L. Sensitivity analysis of MODIS band-to-band registration characterization and its impact on the science data products. SPIE Opt. Eng. Appl. 2007, 6679, 667908. [Google Scholar]
- Xu, H.; Sun, R.; Zhang, L.; Tang, Y.; Liu, S.; Wang, Z. Influence on Image Interpretation of Band to Band Registration Error in High Resolution Satellite Remote Sensing Imagery. In Proceedings of the 2012 2nd International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 1–3 June 2012; pp. 1–4. [Google Scholar]
- Belward, A.S.; Skoien, J.O. Who launched what, when and why; trends in global land-cover observation capacity from civilian earth observation satellites. ISPRS J. Photogram. Remote Sens. 2015, 103, 115–128. [Google Scholar] [CrossRef]
- ESA. Sentinel-2 User Handbook. Available online: https://sentinel.esa.int/documents/247904/685211/Sentinel-2_User_Handbook (accessed on 24 April 2020).
- ESA. Sentinel-2 Technical Guides. Available online: https://earth.esa.int/web/sentinel/technicalguides/sentinel-2-msi/performance (accessed on 24 April 2020).
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A Calibration and Products Validation Status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Xu, B.; Zhi, W.; Hu, C.; Dong, Y.; Jin, S.; Lu, Y.; Chen, T.; Xu, W.; Liu, Y.; et al. Space eye on flying aircraft: From Sentinel-2 MSI parallax to hybrid computing. Remote Sens. Environ. 2020, 246, 111867. [Google Scholar] [CrossRef]
- ESA. Sentinel-2 L1C Data Quality Report. Available online: https://sentinel.esa.int/documents/247904/685211/Sentinel-2_L1C_Data_Quality_Report/6ad66f15-48ca-4e65-b304-59ef00b7f0e0?version=1.56 (accessed on 6 February 2020).
- Berger, M.; Moreno, J.; Johannessen, J.A.; Levelt, P.F.; Hanssen, R.F. ESA’s sentinel missions in support of Earth system science. Remote Sens. Environ. 2012, 120, 84–90. [Google Scholar] [CrossRef]
- Malenovský, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; García-Santos, G.; Fernandes, R.; Berger, M. Sentinels for science: Potential of Sentinel-1, -2, and -3 missions for scientific observations of ocean, cryosphere, and land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- Hass, E.; Hill, J.; Stoffels, J.; Frantz, D.; Uhl, A. Improvement of the Fmask algorithm for Sentinel-2 images: Separating clouds from bright surfaces based on parallax effects. Remote Sen. Environ. Interdiscip. J. 2018, 215, 471–481. [Google Scholar]
- Munyati, C. The potential for integrating Sentinel 2 MSI with SPOT 5 HRG and Landsat 8 OLI imagery for monitoring semi-arid savannah woody cover. Int. J. Remote Sens. 2017, 38, 4888–4913. [Google Scholar] [CrossRef]
- Pahlevan, N.; Balasubramanian, S.V.; He, J.; Sarkar, S.; Franz, B.A. Sentinel-2 MultiSpectral Instrument (MSI) data processing for aquatic science applications: Demonstrations and validations. Remote Sen. Environ. Interdiscip. J. 2017, 201, 47–56. [Google Scholar] [CrossRef]
- ED Chaves, M.; CA Picoli, M.; D Sanches, I. Recent Applications of Landsat 8/OLI and Sentinel-2/MSI for Land Use and Land Cover Mapping: A Systematic Review. Remote Sens. 2020, 12, 3062. [Google Scholar] [CrossRef]
- ESA. Sentinel-2 Products Specification Document. Available online: https://sentinel.esa.int/documents/247904/349490/S2_MSI_Product_Specification (accessed on 24 April 2020).
- Ping, J.J.; Yeou, R.J.; Ying, H.C. Band-to-band registration and ortho-rectification of multilens/multispectral imagery: A case study of MiniMCA-12 acquired by a fixed-wing UAS. ISPRS J. Photogramm. Remote Sens. 2016, 114, 66–77. [Google Scholar]
- Sergii, S.; Eric, V.; Jean-Claude, R.; Christopher, J. Multi-spectral misregistration of Sentinel-2A images: Analysis and implications for potential applications. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2408–2412. [Google Scholar]
- Amos, C.; Petropoulos, G.P.; Ferentinos, K.P. Determining the use of Sentinel-2A MSI for wildfire burning & severity detection. Int. J. Remote Sens. 2019, 40, 905–930. [Google Scholar] [CrossRef]
- Kääb, A.; Leprince, S. Motion detection using near-simultaneous satellite acquisitions. Remote Sens. Environ. 2014, 154, 164–179. [Google Scholar] [CrossRef] [Green Version]
- Berenstein, C.A.; Kanal, L.N.; Lavine, D.; Olson, E.C. A Geometric Approach to Subpixel Registration Accuracy. Comput. Graphics Image Proc. 1987, 40, 334–360. [Google Scholar] [CrossRef]
- Yang, K.; Fleig, A.J.; Electric, I.o.; Engineer, E. MODIS band-to-band registration. In Proceedings of the IGARSS 2000, IEEE 2000 International Geoscience and Remote Sensing Symposium. Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment. Proceedings (Cat. No.00CH37120), Honolulu, HI, USA, 24–28 July 2000; pp. 887–889. [Google Scholar]
- Kim, W.; Jung, S.; Moon, Y.; Mangum, S.C. Morphological Band Registration of Multispectral Cameras for Water Quality Analysis with Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 2024. [Google Scholar] [CrossRef]
- Simper, A.; Electric, I.O.; Engineer, E. Correcting general band-to-band misregistrations. In Proceedings of the 3rd IEEE International Conference on Image Processing, Lausanne, Switzerland, 19 September 1996; pp. 597–600. [Google Scholar]
- Hao, L.; Tuanjie, L.; Haiqing, Z. High-accuracy band to band registration method for multi-spectral images of HJ-1A/B. J. Electron. 2012, 29, 361–367. [Google Scholar]
- Du, Q.; Bruce, L.M.; Orduyilmaz, A.; Raksuntorn, N. Automatic Registration and Mosaicking for Airborne Multispectral Image Sequences. Photogramm. Eng. Remote Sens. J. Am. Soc. Photogramm. 2008, 74, 169–181. [Google Scholar] [CrossRef]
- Pan, J.; Zhu, Y.; Wang, M.; Zhang, B.X. Parallel Band-to-Band Registration for HJ-1A1B CCD Images Using OpenMP. In Proceedings of the 2011 International Symposium on Image and Data Fusion, Yunnan, China, 9–11 August 2011; pp. 1–4. [Google Scholar]
- Hassanpour, M.; Javan, F.D.; Azizi, A. Band to Band Registration of Multi-Spectral Aerial Imagery—Relief Displacement and Miss-Registration Error. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2019, XLII-4/W18, 467–474. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Gao, Z.; Sun, W.; Wen, F. A Coarse-To-Fine Band Registration Framework for Multi/Hyperspectral Remote Sensing Images Considering Cloud Influence. ISPRS Ann. Photogramm. Remote Sens Spat. Inform. Sci. 2020, V-3-2020, 201–208. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Acquired Date | 2015/08/15 | 2015/08/20 | 2015/12/01 | ||||
|---|---|---|---|---|---|---|---|
| Image scale | Chip | Scene | Chip | Scene | Chip | Scene | |
| Image quantity | 3335 | 165 | 2925 | 160 | 2940 | 158 | |
| With cloud masks | Detected | 285 | 52 | 372 | 56 | 0 | 0 |
| Confirmed | 281 | 49 | 370 | 54 | 0 | 0 | |
| Accuracy (%) | 98.60% | 94.23% | 99.46% | 96.43% | 100% | 100% | |
| Without cloud masks | Detected | 1598 | 127 | 1220 | 111 | 368 | 72 |
| Confirmed | 392 | 59 | 490 | 67 | 0 | 0 | |
| Accuracy (%) | 24.53% | 46.46% | 40.16% | 60.36% | 0% | 0% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, T.; Liu, Y. A Quick Band-to-Band Mis-Registration Detection Method for Sentinel-2 MSI Images. Remote Sens. 2021, 13, 3351. https://doi.org/10.3390/rs13173351
Chen T, Liu Y. A Quick Band-to-Band Mis-Registration Detection Method for Sentinel-2 MSI Images. Remote Sensing. 2021; 13(17):3351. https://doi.org/10.3390/rs13173351
Chicago/Turabian StyleChen, Tianxin, and Yongxue Liu. 2021. "A Quick Band-to-Band Mis-Registration Detection Method for Sentinel-2 MSI Images" Remote Sensing 13, no. 17: 3351. https://doi.org/10.3390/rs13173351
APA StyleChen, T., & Liu, Y. (2021). A Quick Band-to-Band Mis-Registration Detection Method for Sentinel-2 MSI Images. Remote Sensing, 13(17), 3351. https://doi.org/10.3390/rs13173351