
An Application of Sea Ice Tracking Algorithm for Fast Ice and Stamukhas Detection in the Arctic


Abstract
:
1. Introduction
2. Materials and Methods
2.1. SAR Image Pairs
2.2. Operational Sea Ice Charts
2.3. Fast Ice Edge Delineation
- 1.
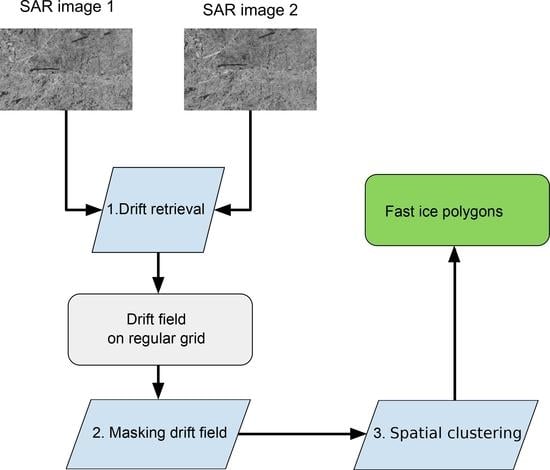
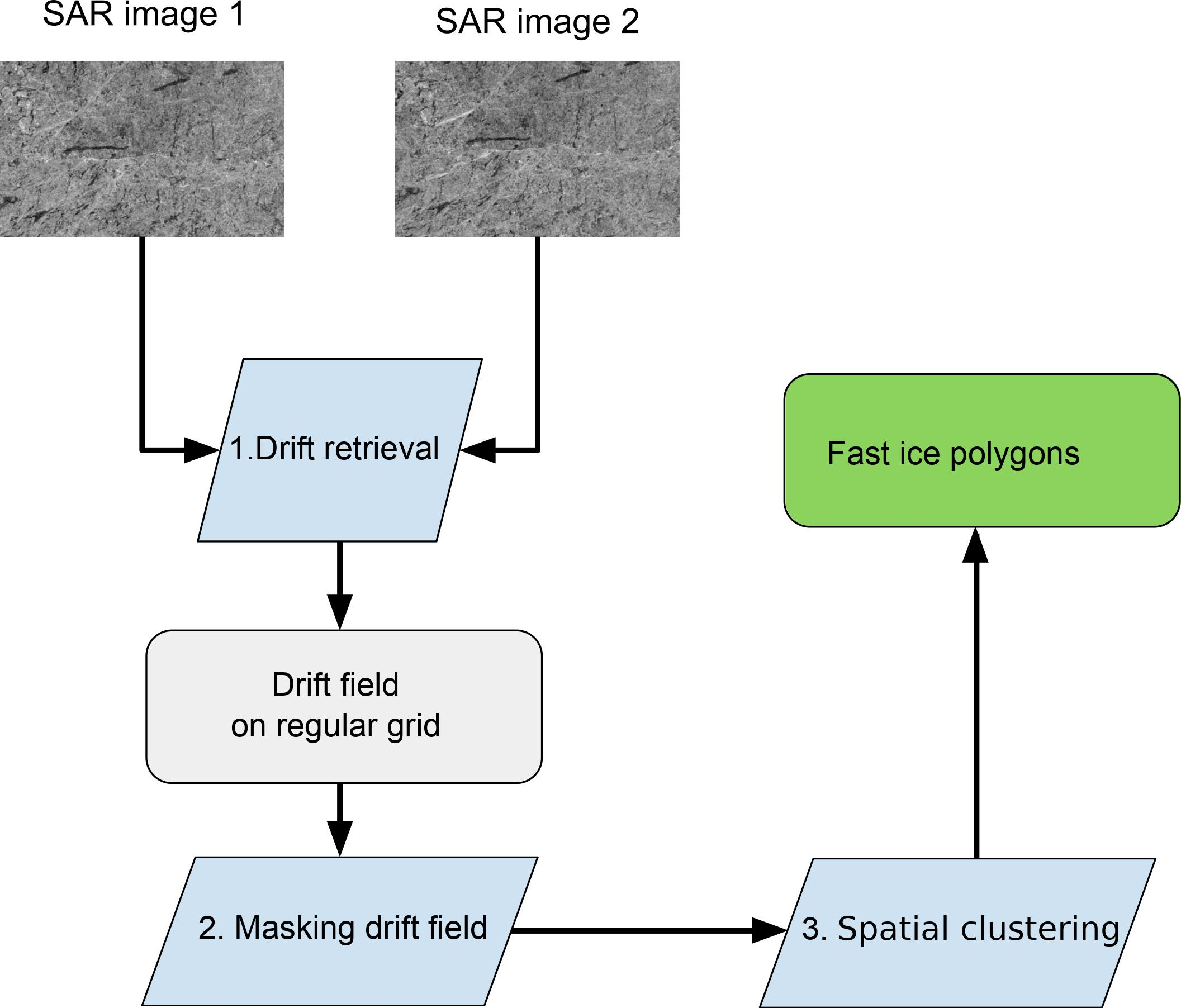
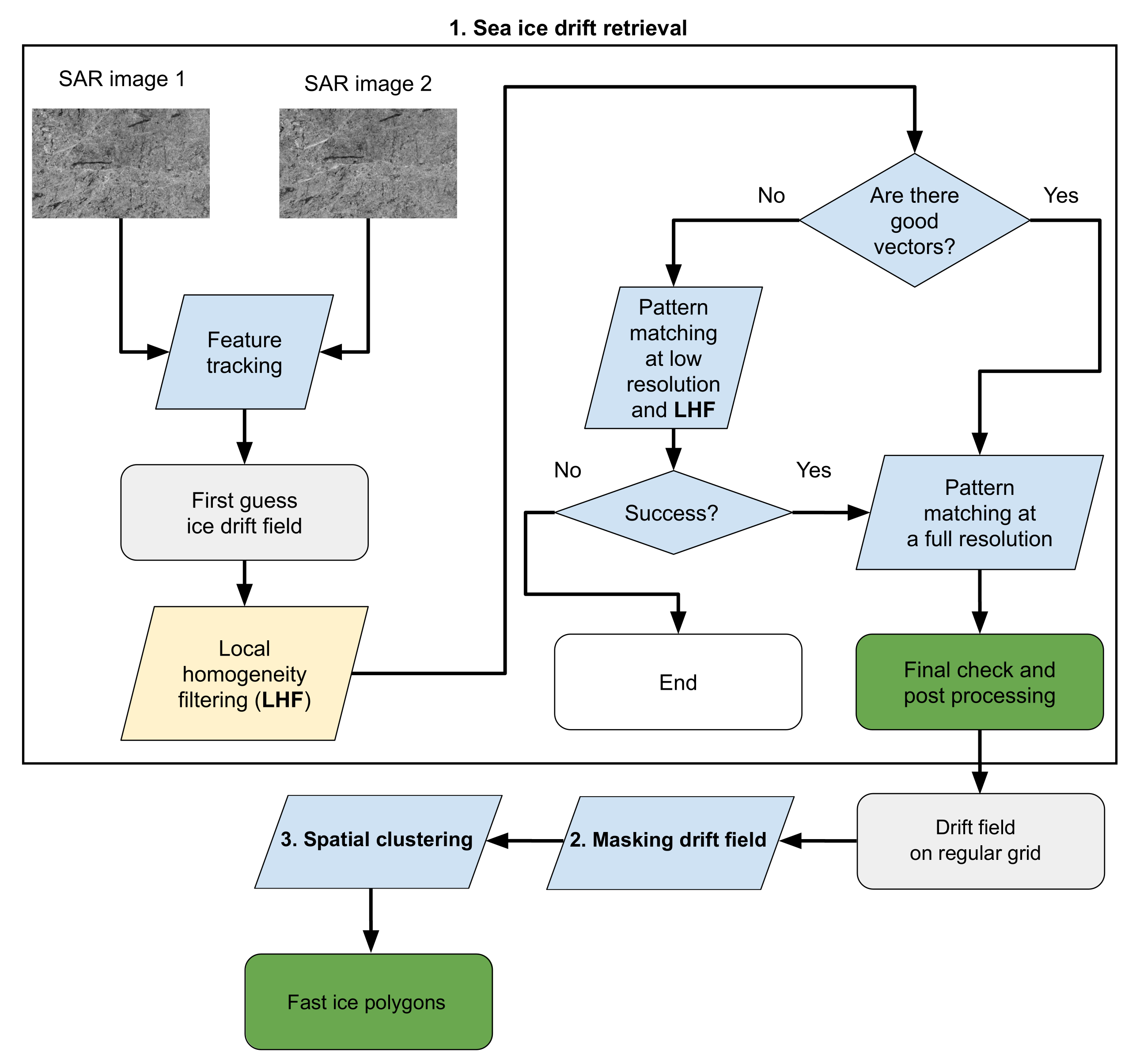
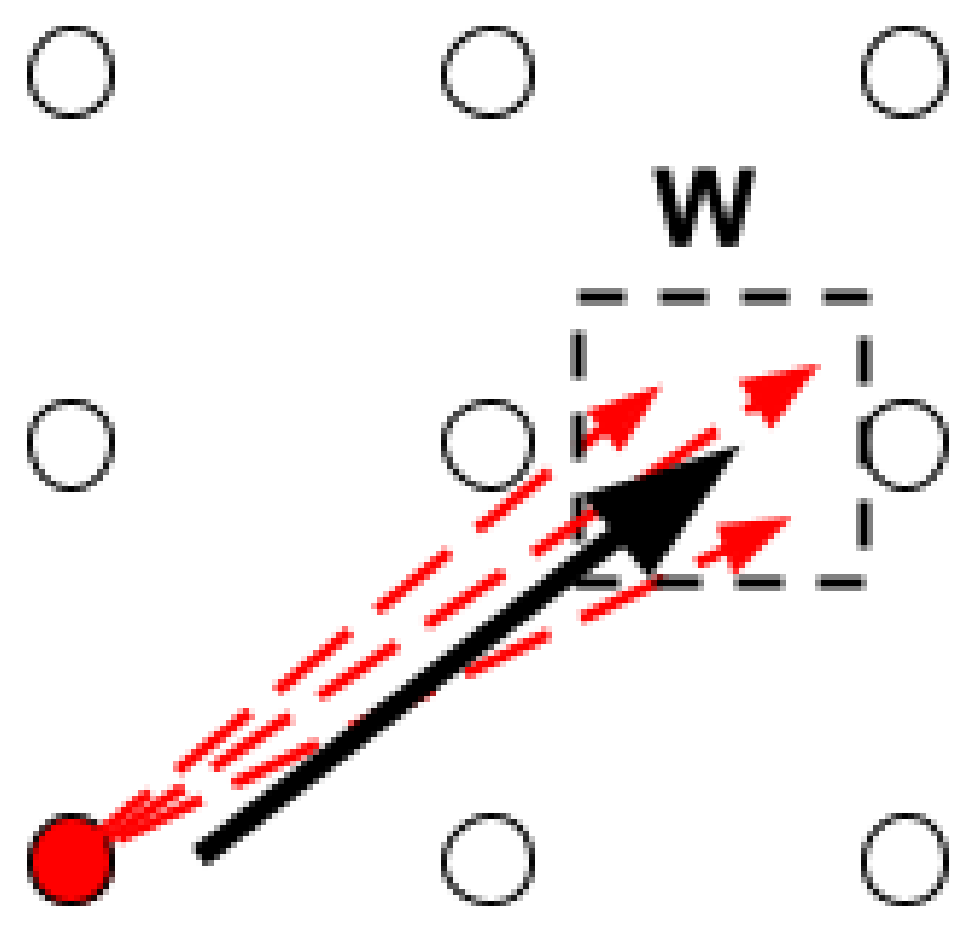
- Sea ice drift retrieval.We designed and implemented an advanced hybrid ice drift algorithm for robust sea ice drift retrieval using a sequence of SAR images at near sub-kilometer scale. The core part of our method is the SAR sea ice tracking approach proposed in [25] aiming to track distinguishable sea ice features throughout a sequence of images with sub-pixel accuracy. However, when the SAR sea ice signal is homogeneous, the features become indistinct, thus, the feature-based algorithms such as [25] could fail. Another limitation of the algorithms is sparse output data. In these cases, the area-based methods operating with the intensity values of image patches are preferable [26]. To combine the benefits of both types of retrieval approaches we developed a hybrid ice drift framework based on the feature tracking algorithm [25] and the normalized cross-correlation technique [27]. Here, and throughout the text, we refer to the area-based normalized cross-correlation technique as to the pattern matching. A full algorithm workflow is shown in Figure 1. In the initial attempt, we estimate the ice displacement by the feature tracking algorithm with default parameters described in [25]. Then we apply the local homogeneity criteria [25] for the obtained ice drift field to determine whether ’good’ ice drift vectors are present. A sea ice displacement vector is considered as a true vector if the following criteria are satisfied:
- a vector has at least 7 neighbors in a radius of 300 pixels;
- a vector has at least 5 neighbors with similar directions that deviate from the considered within 5;
- a vector has at least 5 neighbors with the length varying within 3 pixels from the concerned.
The criteria thresholds were defined empirically and based on the assumption that several vectors should ’belong’ to a certain ice floe that survived a period between acquisitions of SAR images, and thus both their length and direction must be homogeneous. These simple and consistent criteria allow to keep only feasible ice drift vectors, including those determined in the zones with large ice speed gradients, such as near the borders between drifting and fast ice. The obtained ice drift vectors are sparsely distributed and, as mentioned above, it might not be possible to derive them at all in some cases. To overcome these obstacles, the area-based algorithm is used. If there are a number of the ’good’ ice displacement vectors produced by the feature tracking algorithm, they become the guide vectors for the pattern matching algorithm, which greatly reduces the computational efforts by decreasing the search area (see Figure 2).A pair selection for ice drift determination depends on SAR data availability. The time gap between the nearest SAR image acquisitions covering the same area of Arctic typically varies from 1 to 3 days for both Sentinel-1 and ENVISAT. To optimize the computational efficiency for pattern matching, we performed ice drift calculation on a coarse resolution first, and then on full-resolution grids. The derived ice drift vectors at coarse spatial resolution (the grid step size of 100 pixels) as the first guess allows to check if the true ice displacement vectors can be obtained. In case of successfully retrieved ice drift vectors, a computation is performed on a full resolution grid with a step size of 30 pixels that corresponds to 4.5 km and 1.2 km for ENVISAT and Sentinel-1 wide-swath data, respectively. An image patch size is set to 32 × 32 pixels and a default searching area size is of 500 × 500 pixels around a grid point. Therefore, the proposed ice drift retrieval approach that is a combination of the feature tracking and pattern matching utilizing the benefits of both allows us to obtain a robust ice drift product on a regular grid. At the final stage of the ice drift retrieval, the resultant ice displacement vectors are checked for the local homogeneity, and then used for further processing. Figure 2 shows an example of the resultant sea ice drift field obtained using the described approach. - 2.
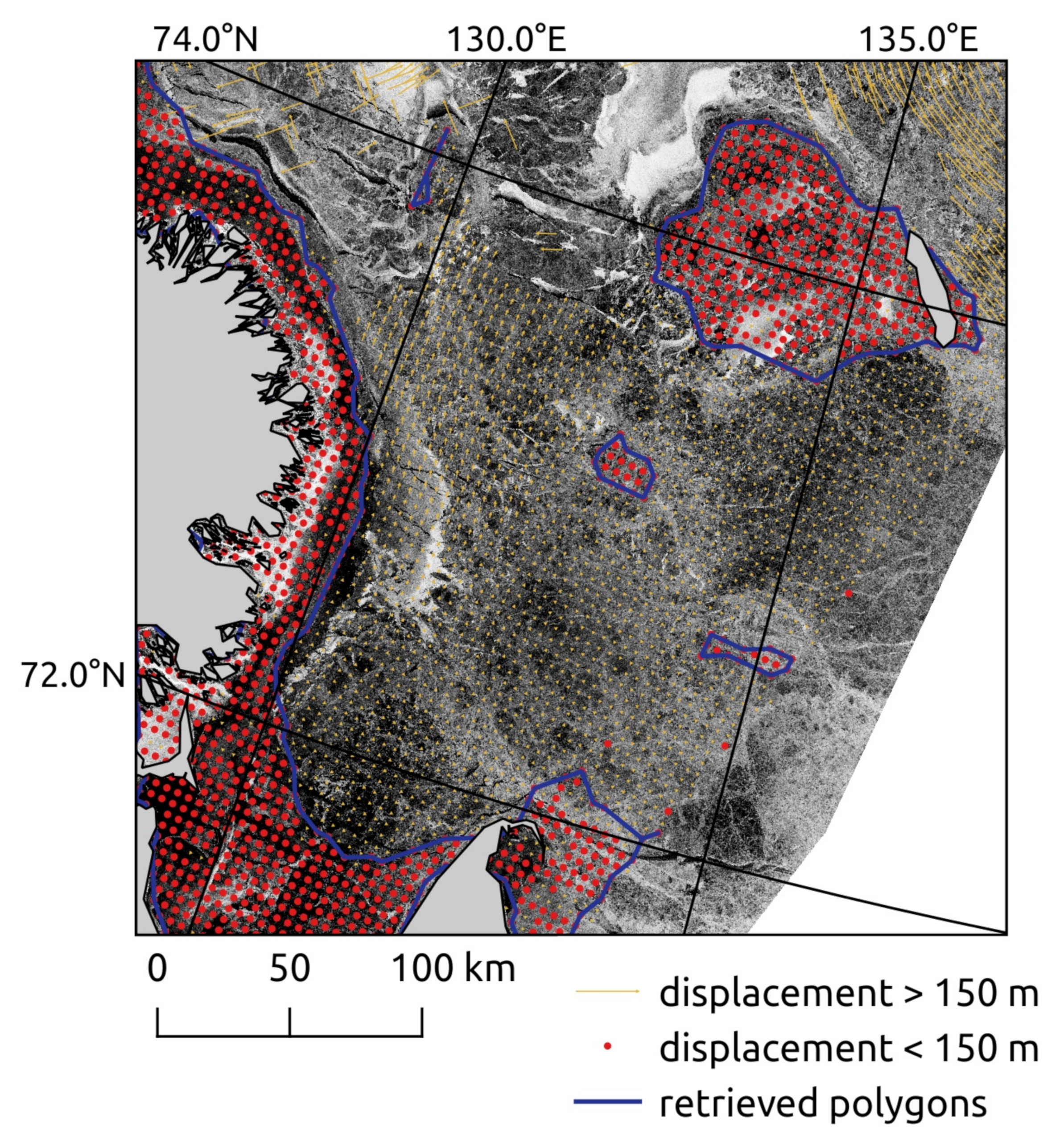
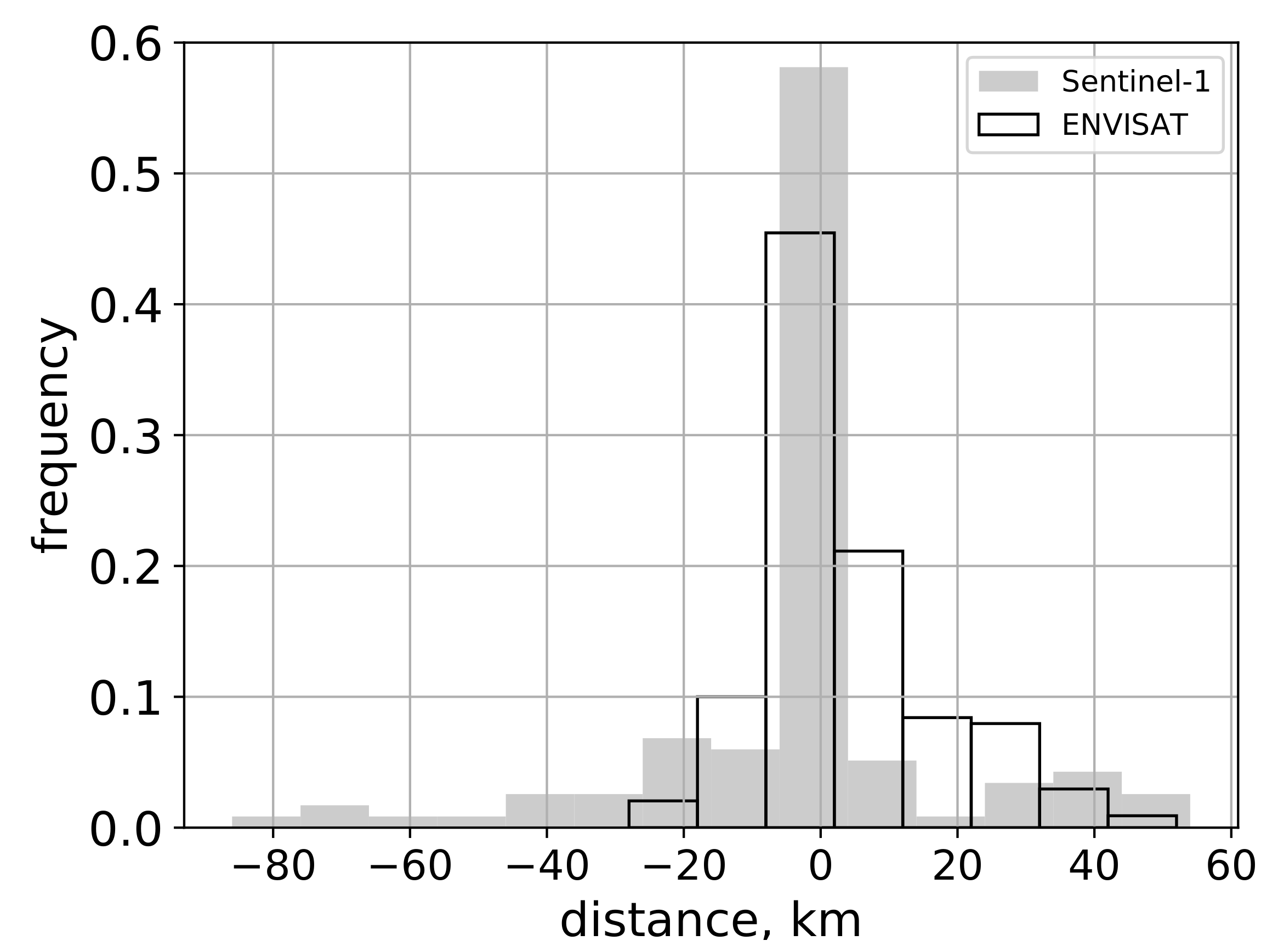
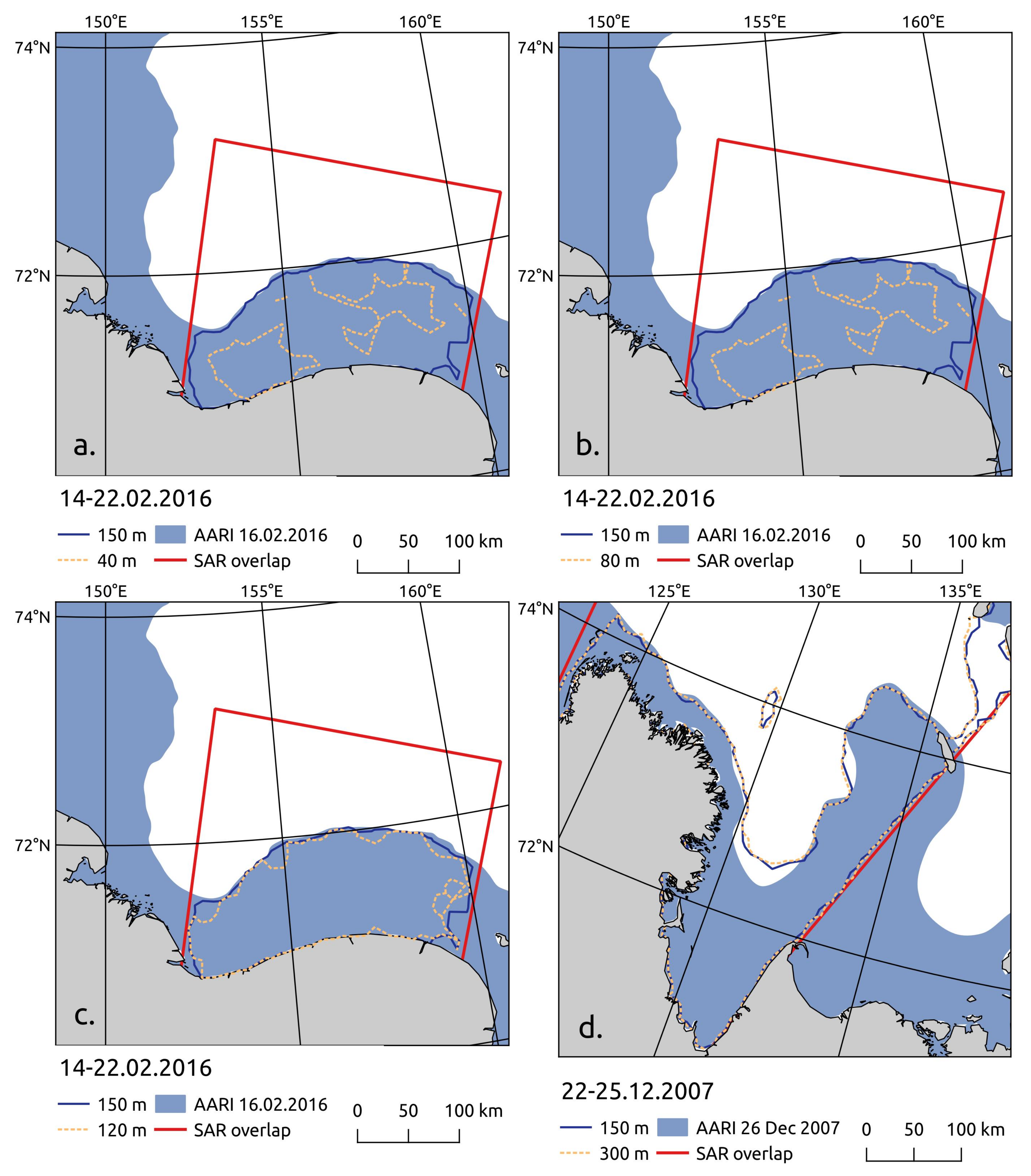
- Masking of the resultant drift fields.The sea ice drift field was masked by displacement so that only the point with displacement of less that 150 m remained (Figure 3). The displacement threshold was selected empirically. The algorithm was tested with 1-, 2- and 3-pixel displacement thresholds (40, 80 and 120 m correspondingly) for Sentinel-1 data (Figure A1a–c) and 1- and 2-pixel displacement threshold (150 and 300 m) for ENVISAT data (Figure A1d). For Sentinel-1 data, the best performance was obtained with a 3-pixel (120 m) threshold, while for the ENVISAT data both 1- and 2-pixel (150 and 300 m) thresholds showed almost identical results. For consistency, the displacement threshold was set to 150 m for both Sentinel-1 and ENVISAT data. Additionally, the land features are masked at this step using a GSHHG landmask L1 (https://www.soest.hawaii.edu/pwessel/gshhg/ (accessed on 27 April 2021)). Therefore, the resultant group of points correspond to motionless fast ice or stamukhas.
- 3.
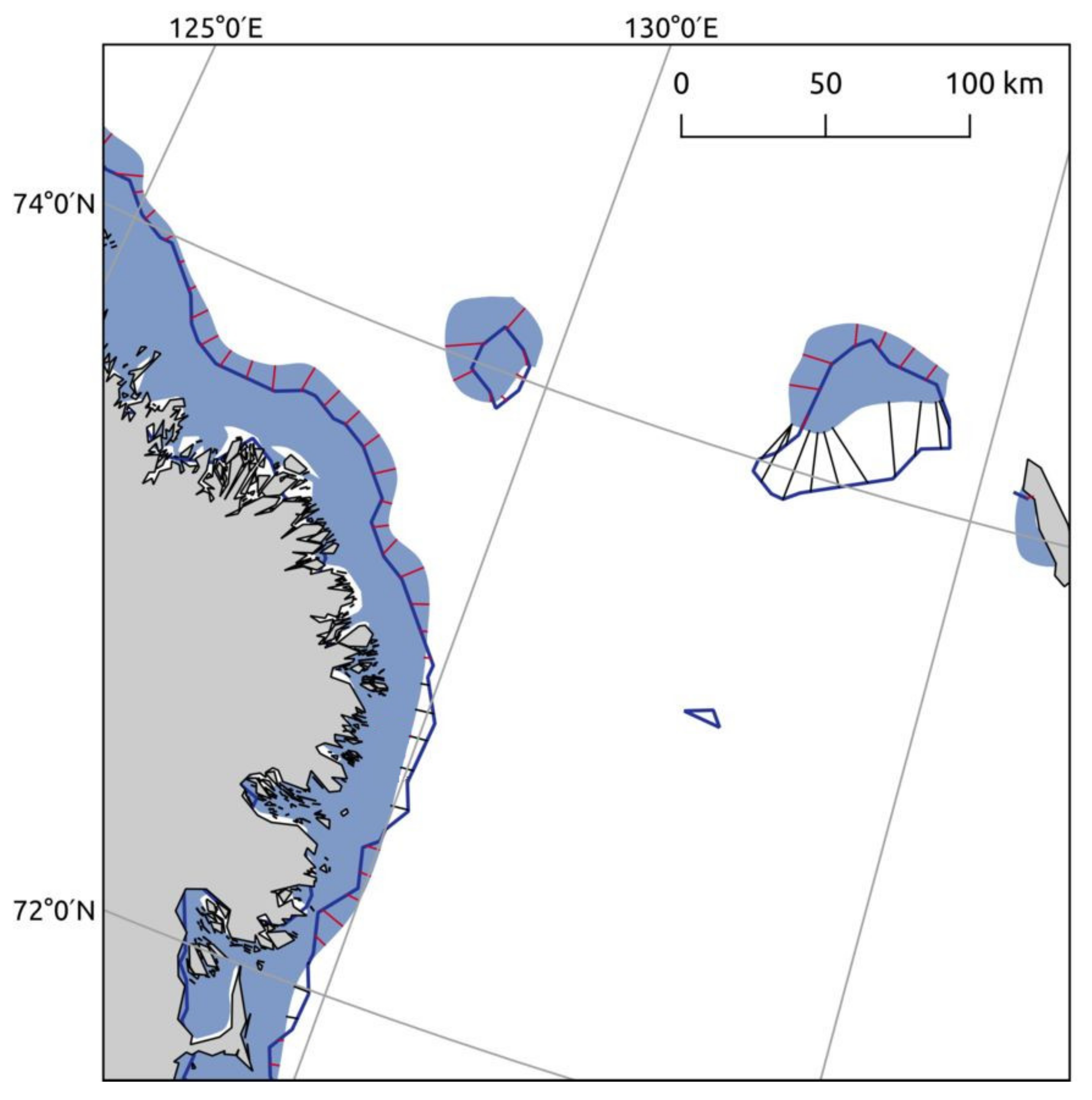
- Spatial clustering.To draw the contours of the field with no displacement we used the alpha-shape method of computational geometry applied in [28]. The method creates the space generated by point pairs that can be touched by an empty disc of radius alpha. The alpha parameter controls the level of details of the obtained contour.
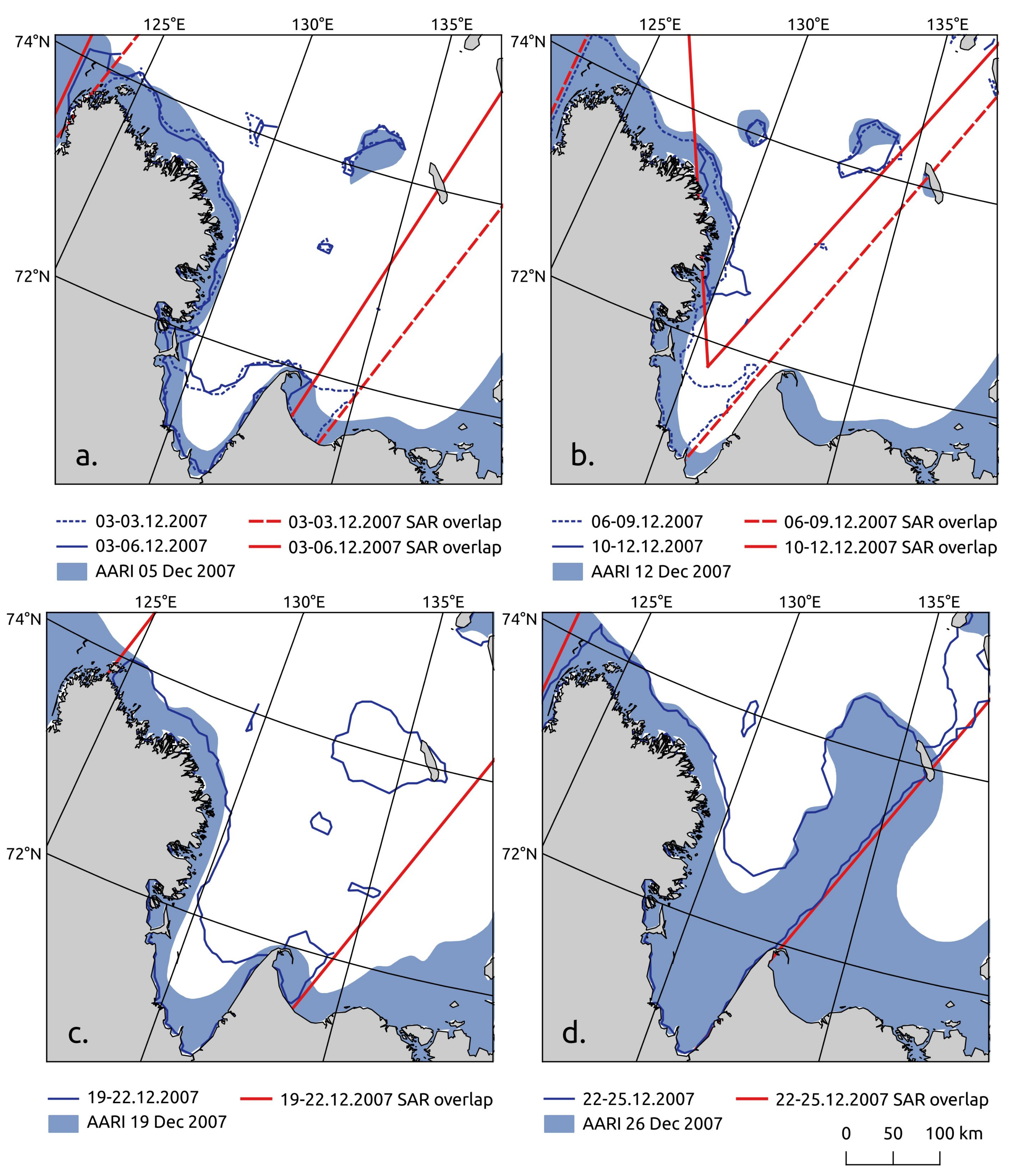
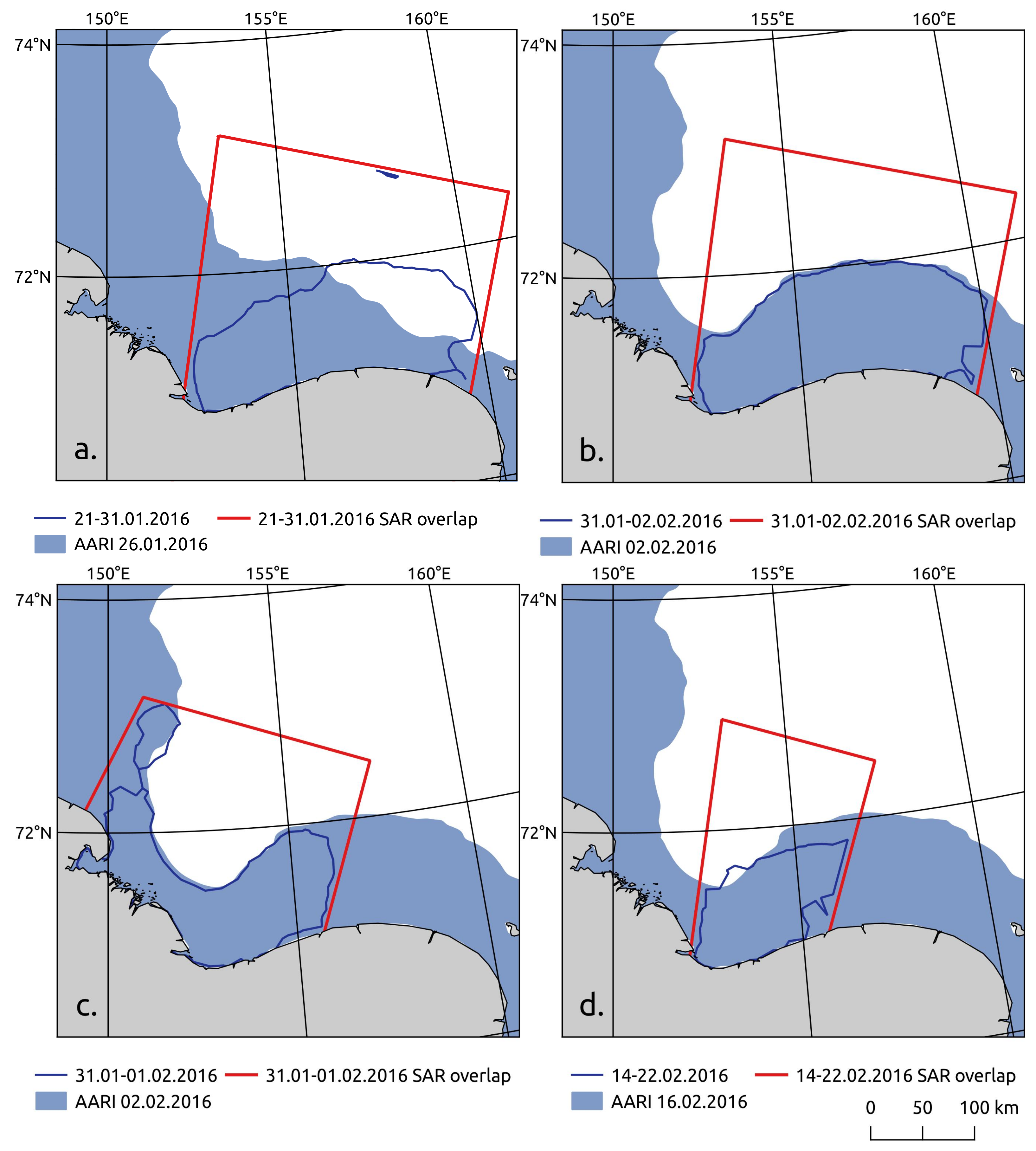
2.4. Comparison with Sea Ice Charts
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Displacement Threshold

Appendix B. Algorithm Parameters
- Time difference between imagesThe tested time difference between images in pairs is up to 10 days. The recommended time difference is up to 20 days. Over a longer time period, the features might become unrecognizable due to evolution of the sea ice surface;
- Block sizeBlock size is the size of the rectangular container of pixels (image patch) in successive images. The recommended range of the block size is 16–64, which typically corresponds to 800–6400 ground meters for satellite SAR wide swath data. In this study, block size was set to 64;
- Search areaTo find correspondences in successive SAR images, the similarity of image patches extracted in the first image is measured by correlation analysis within a defined search window or search area in the second image. The search area is set by a factor and the block size. To reduce the computational time and detect stationary sea ice features with a near-zero drift, the factor was set to 4 (the search area equals 64 × 4 pixels);
- Grid stepThe recommended range of grid step is 20–40 pixels. Smaller grid steps can be used for the detection of stamukhas, but the computational cost will be higher.
- Displacement thresholdA sensitivity study showed that the best results are obtained with 120–150 m values independently from the initial image resolution (Figure A1).
- AlphaThe optimal alpha parameter depends on the grid step, quality of the drift data, configuration of the fast ice edge, and the vicinity of stamukhas. The recommended alpha values are in the range of 2–10 grid step. Stamukhas located within alpha distance to the fast ice edge will be included in the fast ice polygons. The smaller the alpha, the greater the number of separate polygons that are derived.
References
- Mahoney, A.; Eicken, H.; Shapiro, L.; Graves, A. Defining and locating the seaward landfast ice edge in northern Alaska. In Proceedings of the 18th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC’05), Potsdam, NY, USA, 26–30 June 2005; pp. 991–1001. [Google Scholar]
- Mahoney, A.; Eicken, H.; Gaylord, A.G.; Shapiro, L. Alaska landfast sea ice: Links with bathymetry and atmospheric circulation. J. Geophys. Res.-Ocean. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Reimnitz, E.; Dethleff, D.; Nurnberg, D. Contrasts in Arctic Shelf Sea-Ice Regimes and Some Implications—Beaufort Sea Versus Laptev Sea. Mar. Geol. 1994, 119, 215–225. [Google Scholar] [CrossRef]
- Sneed, W.A.; Hamilton, G.S. Recent changes in the Norske Øer Ice Barrier, coastal Northeast Greenland. Ann. Glaciol. 2016, 57, 47–55. [Google Scholar] [CrossRef] [Green Version]
- Zubov, N.N. Arctic Sea Ice; Izd. Glavsevmorputi: Moscow, Russia, 1945. (In Russian) [Google Scholar]
- Selyuzhenok, V.; Krumpen, T.; Mahoney, A.; Janout, M.; Gerdes, R. Seasonal and interannual variability of fast ice extent in the southeastern Laptev Sea between 1999 and 2013. J. Geophys. Res. Ocean. 2015, 120, 7791–7806. [Google Scholar] [CrossRef] [Green Version]
- Mahoney, A.; Eicken, H.; Shapiro, L. How fast is landfast sea ice? A study of the attachment and detachment of nearshore ice at Barrow, Alaska. Cold Reg. Sci. Technol. 2007, 47, 233–255. [Google Scholar] [CrossRef]
- Yu, Y.L.; Stern, H.; Fowler, C.; Fetterer, F.; Maslanik, J. Interannual Variability of Arctic Landfast Ice between 1976 and 2007. J. Clim. 2014, 27, 227–243. [Google Scholar] [CrossRef]
- Eicken, H.; Dmitrenko, I.; Tyshko, K.; Darovskikh, A.; Dierking, W.; Blahak, U.; Groves, J.; Kassens, H. Zonation of the Laptev Sea landfast ice cover and its importance in a frozen estuary. Glob. Planet. Chang. 2005, 48, 55–83. [Google Scholar] [CrossRef]
- Wegner, C.; Wittbrodt, K.; Hölemann, J.; Janout, M.; Krumpen, T.; Selyuzhenok, V.; Novikhin, A.; Polyakova, Y.; Krykova, I.; Kassens, H.; et al. Sediment entrainment into sea ice and transport in the Transpolar Drift: A case study from the Laptev Sea in winter 2011/2012. Cont. Shelf Res. 2017, 141, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Overeem, I.; Anderson, R.S.; Wobus, C.W.; Clow, G.D.; Urban, F.E.; Matell, N. Sea ice loss enhances wave action at the Arctic coast. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Shabanova, N.; Ogorodov, S.; Shabanov, P.; Baranskaya, A. Hydrometeorological forcing of western Russian Arctic coastal dynamics: XX-century history and current state. Geogr. Environ. Sustain. 2018, 11, 113–129. [Google Scholar] [CrossRef] [Green Version]
- Ogorodov, S.; Kamalov, A.; Zubakin, G.; Gudoshnikov, Y.P. The role of sea ice in coastal and bottom dynamics in the Pechora Sea. Geo-Mar. Lett. 2005, 25, 146–152. [Google Scholar] [CrossRef]
- Ogorodov, S.; Aleksyutina, D.; Baranskaya, A.; Shabanova, N.; Shilova, O. Coastal Erosion of the Russian Arctic: An Overview. J. Coast. Res. 2020, 95, 599–604. [Google Scholar] [CrossRef]
- Ogorodov, S.; Arkhipov, V.; Baranskaya, A.; Kokin, O.; Romanov, A. The influence of climate change on the intensity of ice gouging of the bottom by hummocky formations. In Doklady Earth Sciences; Springer: Berlin, Germany, 2018; Volume 478, pp. 228–231. [Google Scholar]
- Fraser, A.D.; Massom, R.A.; Michael, K.J. A Method for Compositing Polar MODIS Satellite Images to Remove Cloud Cover for Landfast Sea-Ice Detection. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3272–3282. [Google Scholar] [CrossRef]
- Meyer, F.J.; Mahoney, A.R.; Eicken, H.; Denny, C.L.; Druckenmiller, H.C.; Hendricks, S. Mapping arctic landfast ice extent using L-band synthetic aperture radar interferometry. Remote Sens. Environ. 2011, 115, 3029–3043. [Google Scholar] [CrossRef]
- Karvonen, J. Estimation of Arctic land-fast ice cover based on dual-polarized Sentinel-1 SAR imagery. Cryosphere 2018, 12, 2595–2607. [Google Scholar] [CrossRef] [Green Version]
- Dammann, D.O.; Eriksson, L.E.; Mahoney, A.R.; Eicken, H.; Meyer, F.J. Mapping pan-Arctic landfast sea ice stability using Sentinel-1 interferometry. Cryosphere 2019, 13, 557–577. [Google Scholar] [CrossRef] [Green Version]
- Fraser, A.D.; Massom, R.A.; Ohshima, K.I.; Willmes, S.; Kappes, P.J.; Cartwright, J.; Porter-Smith, R. High-resolution mapping of circum-Antarctic landfast sea ice distribution, 2000–2018. Earth Syst. Sci. Data 2020, 12, 2987–2999. [Google Scholar] [CrossRef]
- Li, X.; Shokr, M.; Hui, F.; Chi, Z.; Heil, P.; Chen, Z.; Yu, Y.; Zhai, M.; Cheng, X. The spatio-temporal patterns of landfast ice in Antarctica during 2006–2011 and 2016–2017 using high-resolution SAR imagery. Remote Sens. Environ. 2020, 242, 111736. [Google Scholar] [CrossRef]
- Kim, M.; Kim, H.C.; Im, J.; Lee, S.; Han, H. Object-based landfast sea ice detection over West Antarctica using time series ALOS PALSAR data. Remote Sens. Environ. 2020, 242, 111782. [Google Scholar] [CrossRef]
- Giles, A.B.; Massom, R.A.; Lytle, V.I. Fast-ice distribution in East Antarctica during 1997 and 1999 determined using RADARSAT data. J. Geophys. Res.-Ocean. 2008, 113. [Google Scholar] [CrossRef] [Green Version]
- Griebel, J.; Dierking, W. Impact of sea ice drift retrieval errors, discretization and grid type on calculations of ice deformation. Remote Sens. 2018, 10, 393. [Google Scholar] [CrossRef] [Green Version]
- Demchev, D.; Volkov, V.; Kazakov, E.; Alcantarilla, P.F.; Sandven, S.; Khmeleva, V. Sea Ice Drift Tracking From Sequential SAR Images Using Accelerated-KAZE Features. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5174–5184. [Google Scholar] [CrossRef]
- Demchev, D.; Eriksson, L.; Smolanitsky, V. SAR Image Texture Entropy Analysis for Applicability Assessment of Area-Based and Feature-Based Aea Ice Tracking Approaches. In Proceedings of the 13th European Conference on Synthetic Aperture Radar, VDE (EUSAR 2021), Virtual Conference. 29 March–1 April 2021; pp. 1–3. [Google Scholar]
- Lewis, J. Fast normalized cross-correlation, 1995. Vis. Interface 2010, 2010, 120–123. [Google Scholar]
- Da, T.K.F. 2D Alpha Shapes. CGAL User and Reference Manual; CGAL Editorial Board, 2015, 4.7-4 ed. Available online: hhttp://doc.cgal.org/4.7/Manual/packages.htmlPkgAlphaShape2Summary (accessed on 15 September 2021).
- Gorbunov, J.A.; Losev, S.M.; Dyment, L.N. Stamuhi morja Laptevyh (Stamukhas of the Laptev Sea). Probl. Arctiki I Antarct. 2008, 79, 111–116. [Google Scholar]
- Selyuzhenok, V.; Mahoney, A.; Krumpen, T.; Castellani, G.; Gerdes, R. Mechanisms of fast-ice development in the south-eastern Laptev Sea: A case study for winter of 2007/08 and 2009/10. Polar Res. 2017, 36, 1411140. [Google Scholar] [CrossRef] [Green Version]
- ESA. Sentinel Online. 2021. Available online: https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-1/observation-scenario (accessed on 9 September 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laptev Sea | East Siberian Sea | |
|---|---|---|
| Data | ENVISAT ASAR WS | S1 EWS |
| Spatial resolution | 150 m | 40 m |
| Period | 3–25 December 2007 | 21 January–22 February 2016 |
| Number of image pairs | 7 | 4 |
| Time difference between images in pairs | 0–3 days | 3–10 days |
| Total length of fast ice edge | 4400 km | 1190 km |
| Time difference between image 2 in pair and date of AARI chart issue | 0–3 days | 1–5 days |
| Abs. mean distance to AARI fast ice edge | 9.7 km | 15.0 km |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Selyuzhenok, V.; Demchev, D. An Application of Sea Ice Tracking Algorithm for Fast Ice and Stamukhas Detection in the Arctic. Remote Sens. 2021, 13, 3783. https://doi.org/10.3390/rs13183783
Selyuzhenok V, Demchev D. An Application of Sea Ice Tracking Algorithm for Fast Ice and Stamukhas Detection in the Arctic. Remote Sensing. 2021; 13(18):3783. https://doi.org/10.3390/rs13183783
Chicago/Turabian StyleSelyuzhenok, Valeria, and Denis Demchev. 2021. "An Application of Sea Ice Tracking Algorithm for Fast Ice and Stamukhas Detection in the Arctic" Remote Sensing 13, no. 18: 3783. https://doi.org/10.3390/rs13183783
APA StyleSelyuzhenok, V., & Demchev, D. (2021). An Application of Sea Ice Tracking Algorithm for Fast Ice and Stamukhas Detection in the Arctic. Remote Sensing, 13(18), 3783. https://doi.org/10.3390/rs13183783