
Improved Single-Frequency Kinematic Orbit Determination Strategy of Small LEO Satellite with the Sun-Pointing Attitude Mode



Abstract
:1. Introduction
2. Methodology
2.1. GPS/BDS-Combined Single-Frequency KOD Model
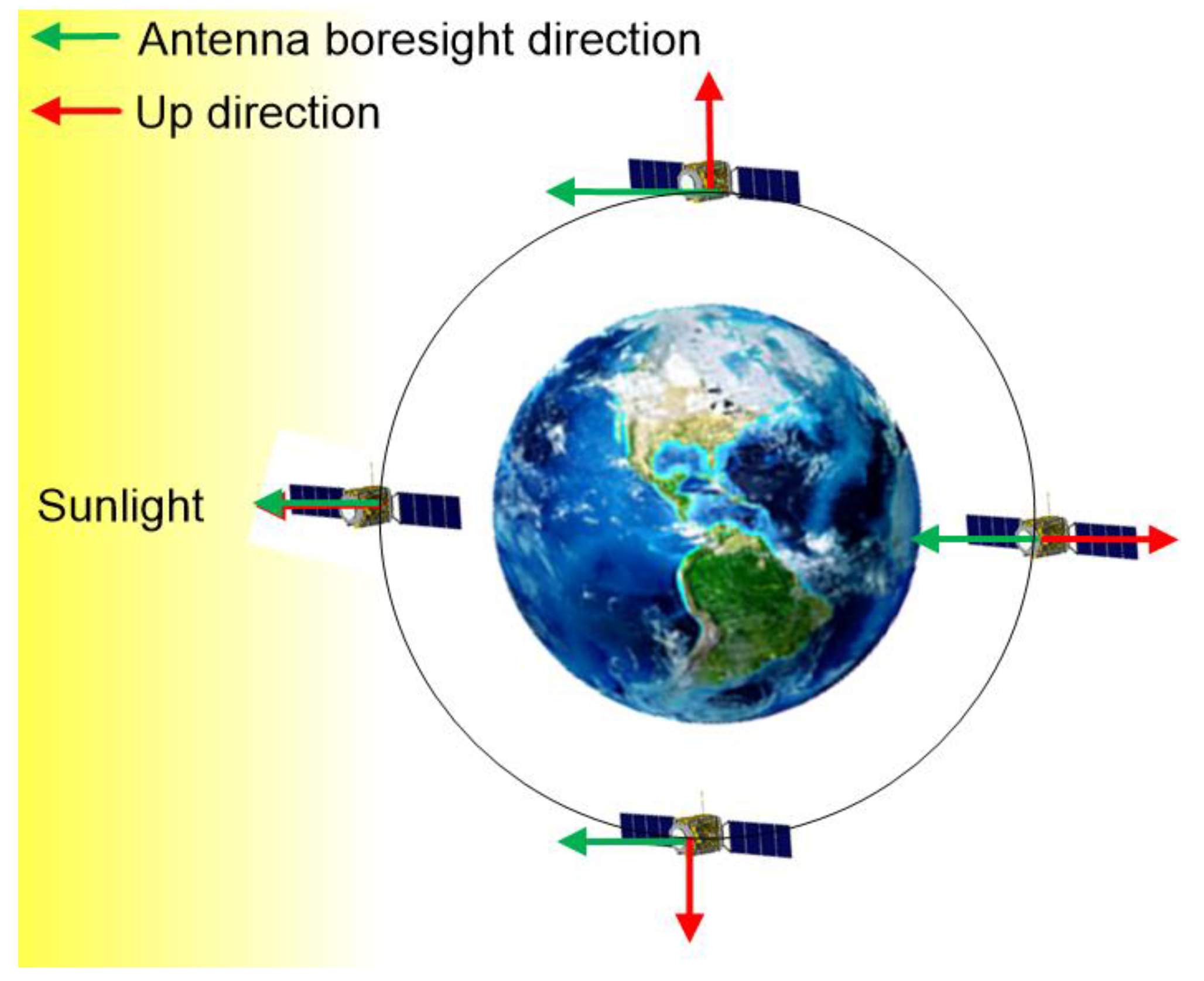
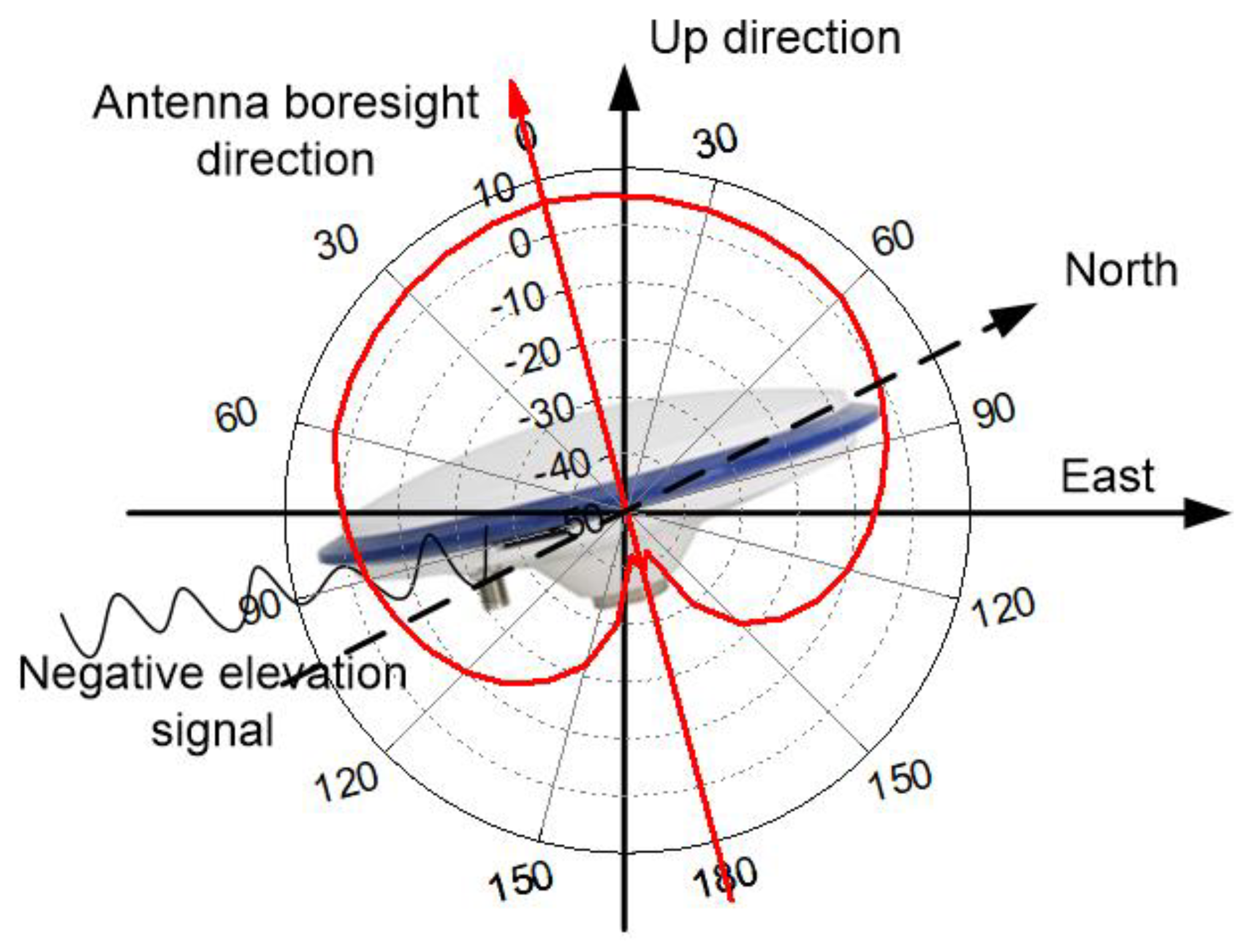
2.2. Weighting Model with C/N0 for the Sun-Pointing Attitude Mode
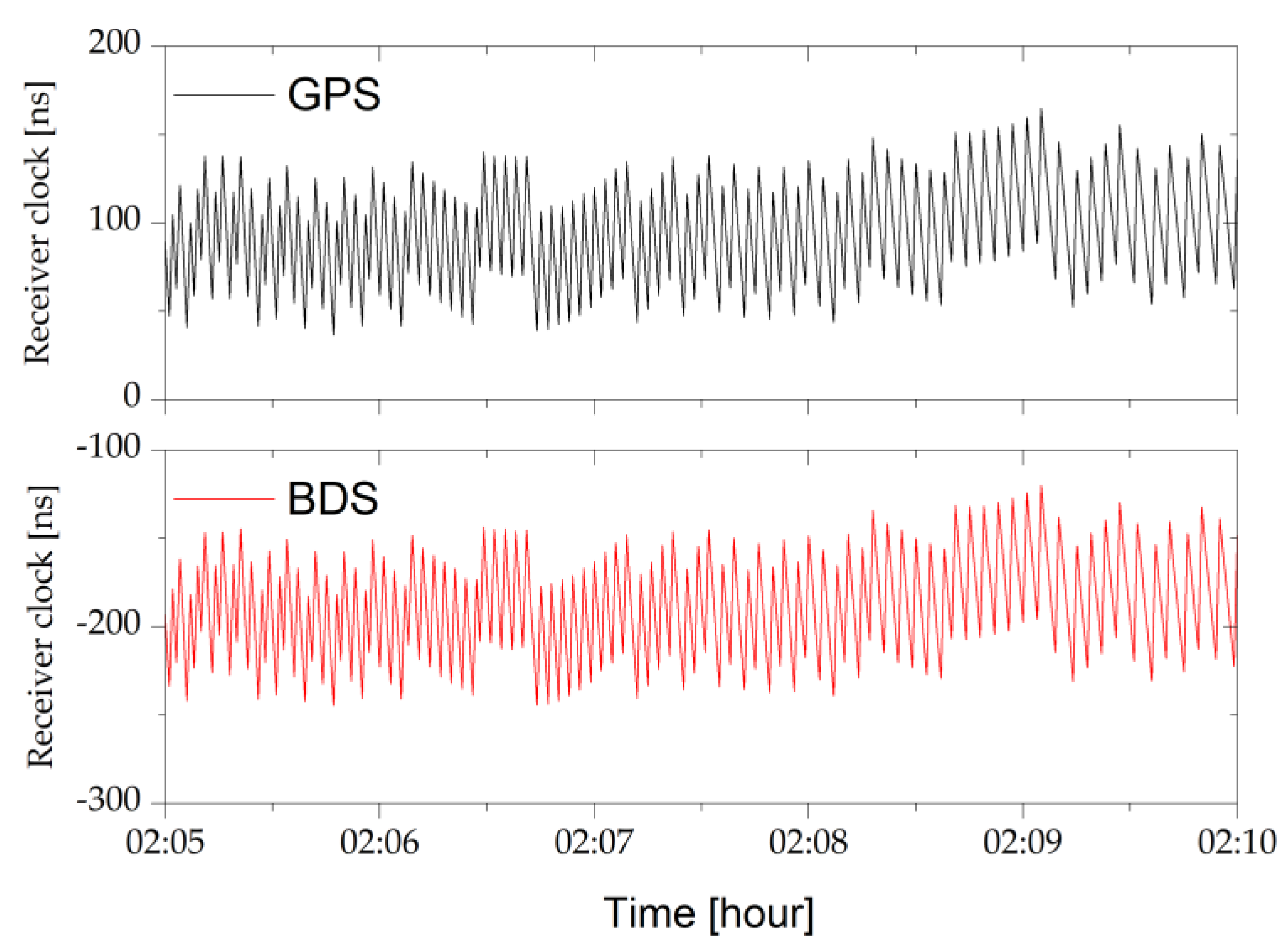
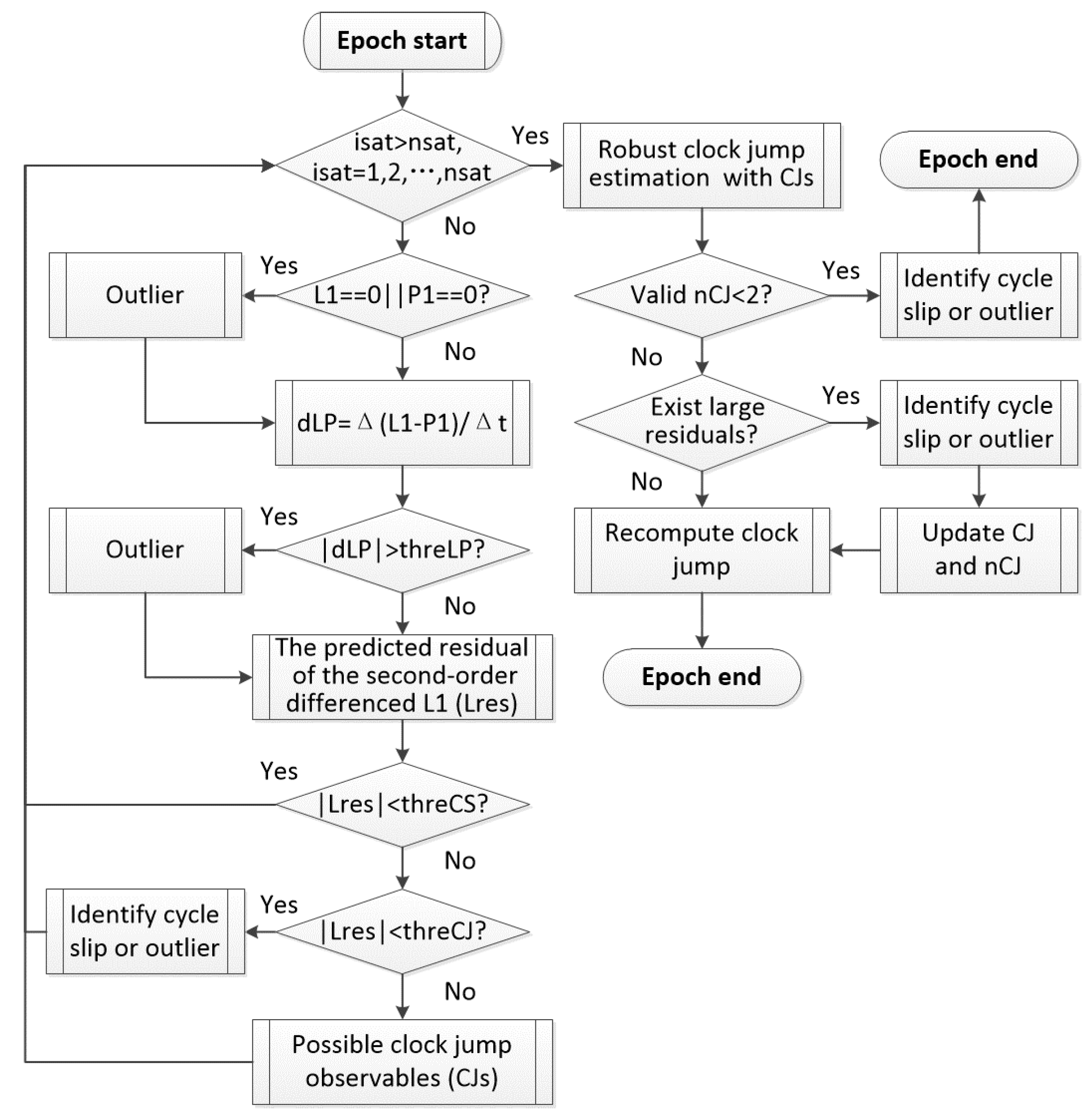
2.3. Joint Detection of Clock Jump and Cycle Slip for the Single-Frequency Data
3. Results and Analysis
3.1. Data Description and Processing Configuration
3.2. Validation of the C/N0 Based Weighting Model
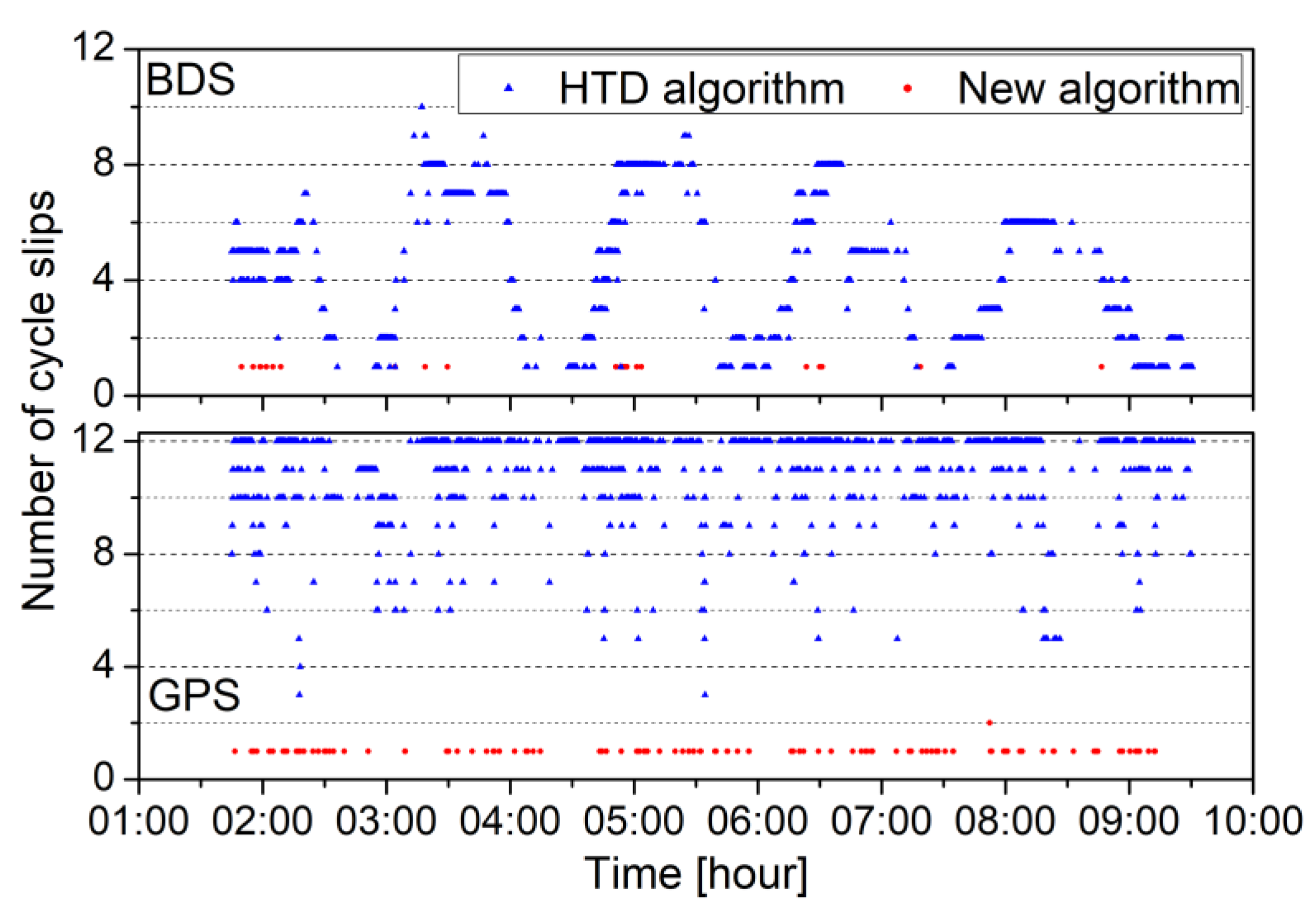
3.3. Validation of Single-Frequency Cycle Slip Detection
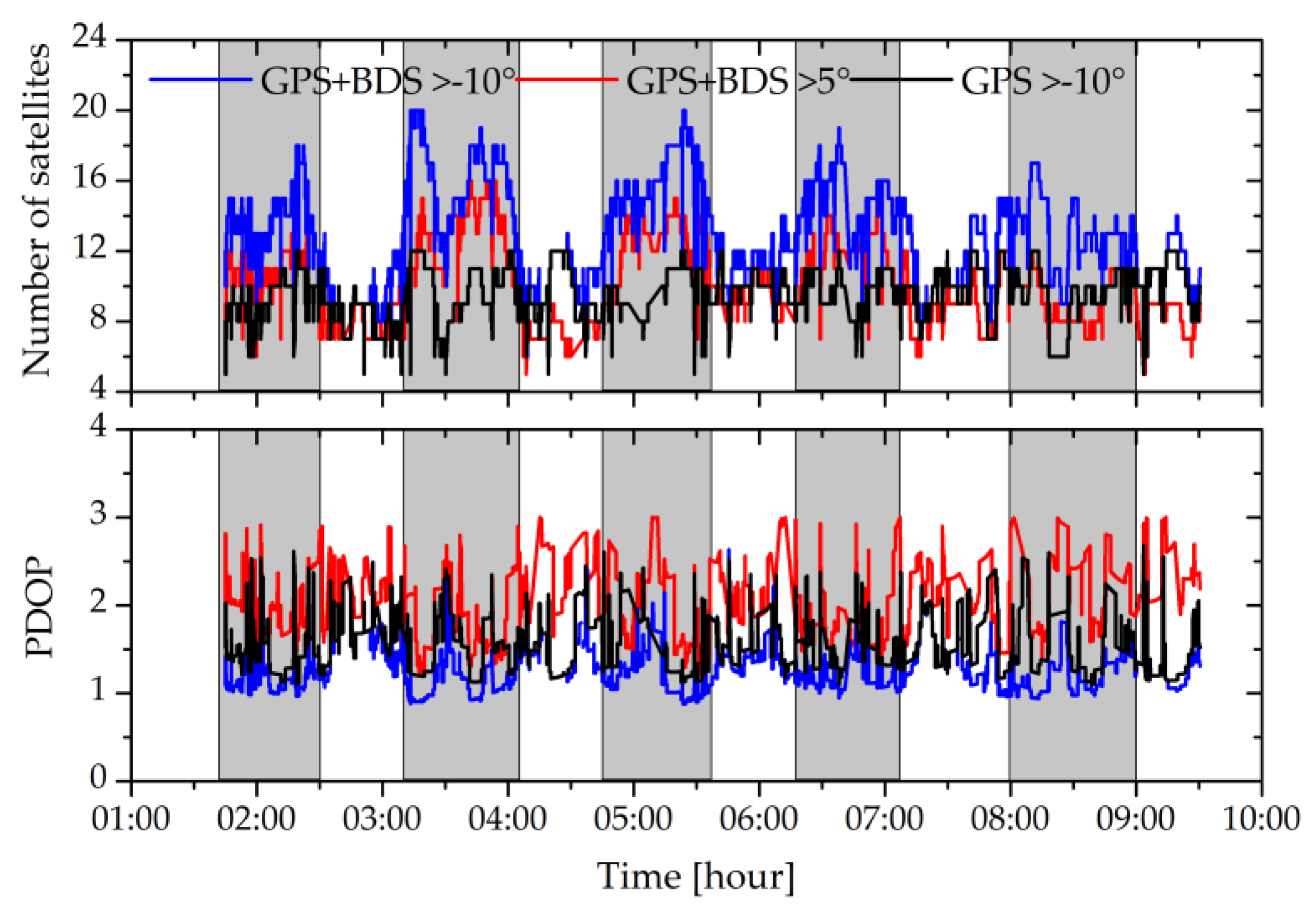
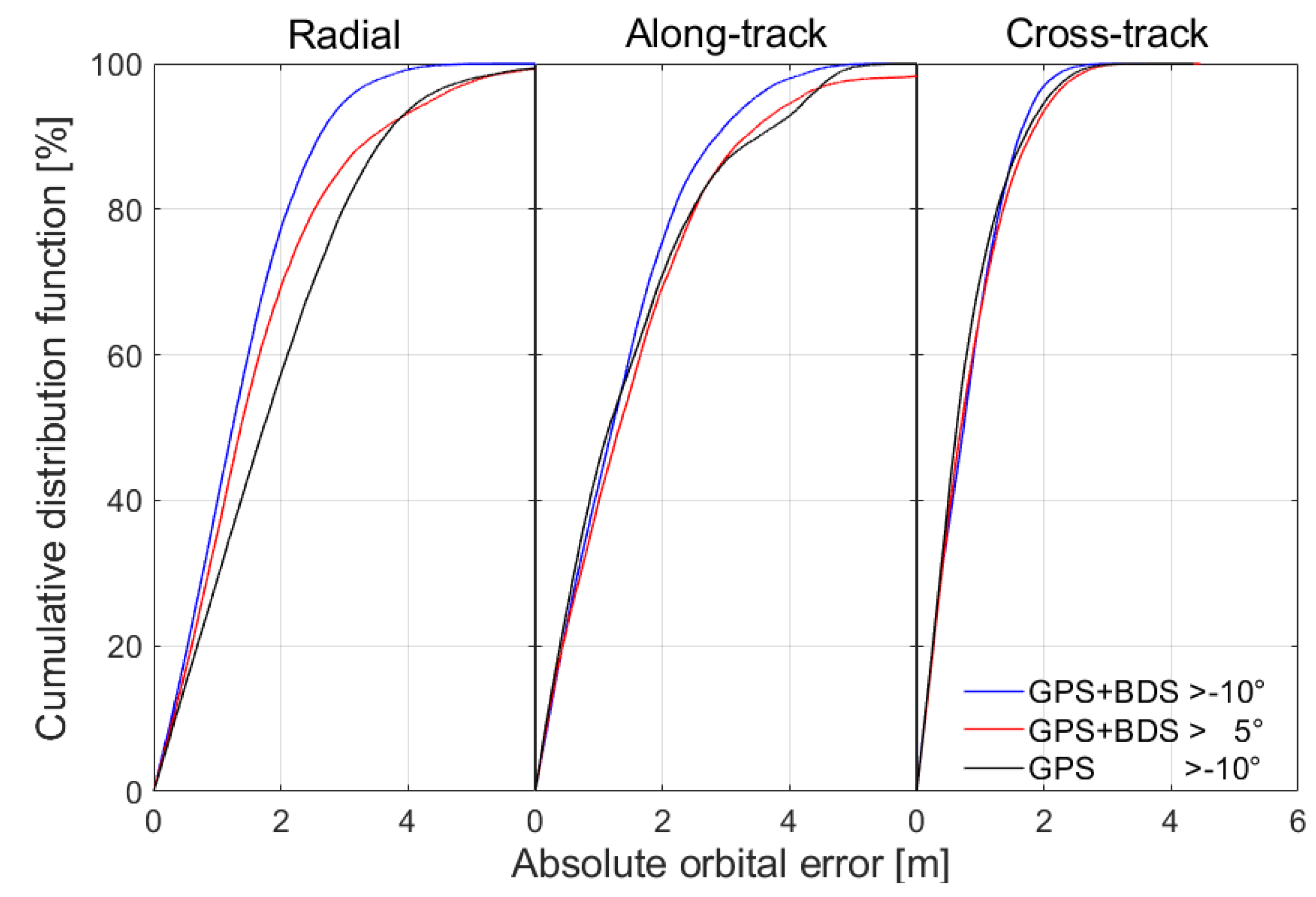
3.4. GPS/BDS Single-Frequency KOD Analysis of Luojia-1A Satellite
4. Discussions and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bertiger, W.I.; Bar-Sever, Y.E.; Christensen, E.J.; Davis, E.S.; Guinn, J.R.; Haines, B.J.; Ibanez-Meier, R.W.; Jee, J.R.; Lichten, S.M.; Melbourne, W.G.; et al. GPS precise tracking of TOPEX/POSEIDON: Results and implications. J. Geophys. Res. 1994, 99, 24449. [Google Scholar] [CrossRef]
- Melbourne, W.G.; Davis, E.S.; Yunck, T.P.; Tapley, B.D. The GPS flight experiment on TOPEX/POSEIDON. Geophys. Res. Lett. 1994, 21, 2171–2174. [Google Scholar] [CrossRef] [Green Version]
- Schutz, B.E.; Tapley, B.D.; Abusali, P.A.M.; Rim, H.J. Dynamic orbit determination using GPS measurements from TOPEX/POSEIDON. Geophys. Res. Lett. 1994, 21, 2179–2182. [Google Scholar] [CrossRef]
- Bruinsma, S.; Loyer, S.; Lemoine, J.M.; Perosanz, F.; Tamagnan, D. The impact of accelerometry on CHAMP orbit determination. J. Geod. 2003, 77, 86–93. [Google Scholar] [CrossRef]
- Haines, B.; Bar-Sever, Y.; Bertiger, W.; Desai, S.; Willis, P. One-centimeter orbit determination for Jason-1: New GPS-based strategies. Mar. Geod. 2004, 27, 299–318. [Google Scholar] [CrossRef]
- Kang, Z.; Tapley, B.; Bettadpur, S.; Ries, J.; Nagel, P.; Pastor, R. Precise orbit determination for the GRACE mission using only GPS data. J. Geod. 2006, 80, 322–331. [Google Scholar] [CrossRef]
- Van den Ijssel, J.; Encarnação, J.; Doornbos, E.; Visser, P. Precise science orbits for the Swarm satellite constellation. Adv. Space Res. 2015, 56, 1042–1055. [Google Scholar] [CrossRef]
- Peter, H.; Jäggi, A.; Fernández, J.; Escobar, D.; Ayuga, F.; Arnold, D.; Wermuth, M.; Hackel, S.; Otten, M.; Simons, W.; et al. Sentinel-1A—First precise orbit determination results. Adv. Space Res. 2017, 60, 879–892. [Google Scholar] [CrossRef]
- Sun, Y.; Bai, W.; Liu, C.; Liu, Y.; Du, Q.; Wang, X.; Yang, G.; Liao, M.; Yang, Z.; Zhang, X.; et al. The FengYun-3C radio occultation sounder GNOS: A review of the mission and its early results and science applications. Atmos. Meas. Tech. 2018, 11, 5797–5811. [Google Scholar] [CrossRef] [Green Version]
- Jäggi, A.; Hugentobler, U.; Beutler, G. Pseudo-Stochastic Orbit Modeling Techniques for Low-Earth Orbiters. J. Geod. 2006, 80, 47–60. [Google Scholar] [CrossRef] [Green Version]
- Bock, H.; Jäggi, A.; Švehla, D.; Beutler, G.; Hugentobler, U.; Visser, P. Precise orbit determination for the GOCE satellite using GPS. Adv. Space Res. 2007, 39, 1638–1647. [Google Scholar] [CrossRef]
- Li, J.; Zhang, S.; Zou, X.; Jiang, W. Precise orbit determination for GRACE with zero-difference kinematic method. Chin. Sci. Bull. 2009, 55, 600–606. [Google Scholar] [CrossRef]
- Montenbruck, O.; Gill, E.; Kroes, R. Rapid orbit determination of LEO satellites using IGS clock and ephemeris products. GPS Solut. 2005, 9, 226–235. [Google Scholar] [CrossRef]
- Peng, D.; Wu, B. Zero-difference and single-difference precise orbit determination for LEO using GPS. Chin. Sci. Bull. 2007, 52, 2024–2030. [Google Scholar] [CrossRef]
- Svehla, D.; Rothacher, M. Kinematic orbit determination of LEOs based on zero or double-difference algorithms using simulated and real SST GPS data. In Vistas for Geodesy in the New Millennium; Adam, J., Schwarz, K.P., Eds.; Springer: Berlin/Heidelberg, Germany, 2002; Volume 125, pp. 322–328. [Google Scholar]
- Zhu, S.; Reigber, C.; König, R. Integrated adjustment of CHAMP, GRACE, and GPS data. J. Geod. 2004, 78, 103–108. [Google Scholar] [CrossRef]
- Li, M.; Li, W.; Shi, C.; Jiang, K.; Guo, X.; Dai, X.; Meng, X.; Yang, Z.; Yang, G.; Liao, M. Precise orbit determination of the Fengyun-3C satellite using onboard GPS and BDS observations. J. Geod. 2017, 91, 1313–1327. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Ma, F.; Li, X.; Lv, H.; Bian, L.; Jiang, Z.; Zhang, X. LEO constellation-augmented multi-GNSS for rapid PPP convergence. J. Geod. 2018, 93, 749–764. [Google Scholar] [CrossRef]
- Weinbach, U.; Schön, S. Improved GRACE kinematic orbit determination using GPS receiver clock modeling. GPS Solut. 2012, 17, 511–520. [Google Scholar] [CrossRef]
- Sun, X.; Han, C.; Chen, P. Real-time precise orbit determination of LEO satellites using a single-frequency GPS receiver: Preliminary results of Chinese SJ-9A satellite. Adv. Space Res. 2017, 60, 1478–1487. [Google Scholar] [CrossRef]
- Montenbruck, O.; Gill, E.; Markgraf, M. PHOENIX-XNS-A miniature real-time navigation system for LEO satellites. In Proceedings of the 3rd ESA Workshop on Satellite Navigation User Equipment Technologies, Noordwijk, The Netherlands, 11–13 December 2006. [Google Scholar]
- Montenbruck, O.; Ramos-Bosch, P. Precision real-time navigation of LEO satellites using global positioning system measurements. GPS Solut. 2008, 12, 187–198. [Google Scholar] [CrossRef]
- Chen, P.; Zhang, J.; Sun, X. Real-time kinematic positioning of LEO satellites using a single-frequency GPS receiver. GPS Solut. 2016, 21, 973–984. [Google Scholar] [CrossRef] [Green Version]
- Bock, H.; Jäggi, A.; Dach, R.; Schaer, S.; Beutler, G. GPS single-frequency orbit determination for low Earth orbiting satellites. Adv. Space Res. 2009, 43, 783–791. [Google Scholar] [CrossRef]
- Hwang, Y.; Born, G.H. Orbit determination strategy using single-frequency global-positioning-system data. J. Spacecr. Rocket. 2005, 42, 896–901. [Google Scholar] [CrossRef]
- Kahr, E.; Montenbruck, O.; O'Keefe, K.; Skone, S.; Urbanek, J.; Bradbury, L.; Fenton, P.C. GPS Tracking on a nanosatellite- the CANX-2 Flight experience. In Proceedings of the 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad, Czech Republic, 5-10 June 2011. [Google Scholar]
- Gill, E.; Montenbruck, O.; Brieb, K. GPS-Based Autonomous Navigation for the BIRD Satellite. In Proceedings of the International Symposium Space Flight Dynamics, Biarritz, France, 26–30 June 2000. [Google Scholar]
- Montenbruck, O.; Markgraf, M.; Santandrea, S.; Garcia, A.; Issler, J.-L.; Mercier, F.; Naudet, J.; Serre, S. GPS based Precise Orbit Determination and Real time Navigation of the PROBA2 spacecraft. In Proceedings of the 5th ESA Workshop on Satellite Navigation Technologies, Noordwijk, The Netherlands, 8–10 December 2010. [Google Scholar]
- Yunck, T.P. Orbit determination. In Global Positioning System—Theory and Applications; Parkinson, B.W., Spilker, J.J., Eds.; AIAA: Washington, DC, USA, 1996. [Google Scholar]
- Nava, B.; Coïsson, P.; Radicella, S.M. A new version of the NeQuick ionosphere electron density model. J. Atmos. Sol.-Terr. Phys. 2008, 70, 1856–1862. [Google Scholar] [CrossRef]
- Peng, Y.; Scales, W.A.; Lin, D. GNSS-based hardware-in-the-loop simulations of spacecraft formation flying with the global ionospheric model TIEGCM. GPS Solut. 2021, 25, 1–14. [Google Scholar] [CrossRef]
- Jakowski, N.; Hoque, M.M.; Mayer, C. A new global TEC model for estimating transionospheric radio wave propagation errors. J. Geod. 2011, 85, 965–974. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. 1987, 23, 325–331. [Google Scholar] [CrossRef]
- Montenbruck, O.; Gill, E. Ionospheric Correction for GPS Tracking of LEO Satellites. J. Navig. 2002, 55, 293–304. [Google Scholar] [CrossRef] [Green Version]
- Lou, Y.D.; Zheng, F.; Gu, S.F.; Wang, C.; Guo, H.L.; Feng, Y.M. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. Gps Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- Fu, W.; Huang, G.; Zhang, Q.; Gu, S.; Ge, M.; Schuh, H. Multi-GNSS real-time clock estimation using sequential least square adjustment with online quality control. J. Geod. 2019, 93, 963–976. [Google Scholar] [CrossRef]
- Luo, X.G.; Mayer, M.; Heck, B.; Awange, J.L. A realistic and easy-to-implement weighting model for GPS phase observations. Ieee Trans. Geosci. Remote Sens. 2014, 52, 6110–6118. [Google Scholar] [CrossRef]
- Wang, C.; Walker, R.A.; Moody, M.P. Single Antenna Attitude Algorithm for Nonuniform Antenna Gain Patterns. J. Spacecr. Rocket. 2007, 44, 221–229. [Google Scholar] [CrossRef] [Green Version]
- Rao, C.R. Estimation of variance and covariance components-MINQUE theory. J. Multivar. Anal. 1971, 1, 257–275. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Feng, Y.; Wang, C. Real-time assessment of GNSS observation noise with single receivers. J. Glob. Position. Syst. 2013, 12, 73–82. [Google Scholar]
- de Bakker, P.F.; Tiberius, C.C.J.M. Real-time multi-GNSS single-frequency precise point positioning. GPS Solut. 2017, 21, 1791–1803. [Google Scholar] [CrossRef] [Green Version]
- Sterle, O.; Stopar, B.; Pavlovčič Prešeren, P. Single-frequency precise point positioning: An analytical approach. J. Geod. 2015, 89, 793–810. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X. Real-time clock jump compensation for precise point positioning. GPS Solut. 2013, 18, 41–50. [Google Scholar] [CrossRef]
- Wang, L.; Chen, R.; Li, D.; Zhang, G.; Shen, X.; Yu, B.; Wu, C.; Xie, S.; Zhang, P.; Li, M.; et al. Initial Assessment of the LEO Based Navigation Signal Augmentation System from Luojia-1A Satellite. Sensors 2018, 18, 3919. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, L.; Xu, B.; Fu, W.; Chen, R.; Li, T.; Han, Y.; Zhou, H. Centimeter-Level Precise Orbit Determination for the Luojia-1A Satellite Using BeiDou Observations. Remote Sens. 2020, 12, 2063. [Google Scholar] [CrossRef]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 1993, 18, 91–98. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Models |
|---|---|
| Observations | Ionospheric-free L1 GRAPHIC combination and pseudorange observations |
| Observation weight | Proposed method |
| Estimator | Extended Kalman filter |
| Phase-windup effect | Corrected [46] |
| Satellite antenna phase center and variation | GPS, BDS: IGS14 |
| Receiver antenna phase center and variation | Not corrected |
| Tide displacement | Not corrected |
| DCBs | GPS P1C1/P1P2 product from CODE |
| Relativistic effects | Corrected (International Earth rotation and reference systems, IERS 2003) |
| Satellite orbit and clock of GPS/BDS | German research center for geosciences (GFZ) precise products |
| Tropospheric delay | Not considered |
| Receiver clock | Estimated as white noise for GPS and BDS, respectively |
| Carrier Phase ambiguities | Constants for each continuous tracking arc |
| LEO satellite position | Estimated as white noise |
| Scheme | Radial-Track (m) | Along-Track (m) | Cross-Track (m) | Epoch | |||
|---|---|---|---|---|---|---|---|
| RMS | Mean | RMS | Mean | RMS | Mean | ||
| GPS > −10° | 2.302 | 1.237 | 1.965 | 0.681 | 0.993 | −0.680 | 25,136 |
| GPS + BDS > 5° | 2.104 | 0.823 | 2.069 | 0.830 | 1.057 | −0.760 | 23,835 |
| GPS + BDS > −10° | 1.640 | 0.848 | 1.729 | 0.803 | 0.988 | −0.563 | 27,367 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, W.; Wang, L.; Chen, R.; Zhou, H.; Li, T.; Han, Y. Improved Single-Frequency Kinematic Orbit Determination Strategy of Small LEO Satellite with the Sun-Pointing Attitude Mode. Remote Sens. 2021, 13, 4020. https://doi.org/10.3390/rs13194020
Fu W, Wang L, Chen R, Zhou H, Li T, Han Y. Improved Single-Frequency Kinematic Orbit Determination Strategy of Small LEO Satellite with the Sun-Pointing Attitude Mode. Remote Sensing. 2021; 13(19):4020. https://doi.org/10.3390/rs13194020
Chicago/Turabian StyleFu, Wenju, Lei Wang, Ruizhi Chen, Haitao Zhou, Tao Li, and Yi Han. 2021. "Improved Single-Frequency Kinematic Orbit Determination Strategy of Small LEO Satellite with the Sun-Pointing Attitude Mode" Remote Sensing 13, no. 19: 4020. https://doi.org/10.3390/rs13194020
APA StyleFu, W., Wang, L., Chen, R., Zhou, H., Li, T., & Han, Y. (2021). Improved Single-Frequency Kinematic Orbit Determination Strategy of Small LEO Satellite with the Sun-Pointing Attitude Mode. Remote Sensing, 13(19), 4020. https://doi.org/10.3390/rs13194020