Building on the outcomes of HYQUAPRO which were implemented in DLR’s processing chain for airborne sensors (e.g., [
17]), the EnMAP metadata and product model are designed to achieve ARD, as defined by [
6,
18]. Within this chapter, the methods and design issues are described which are necessary to achieve this goal. This includes the procedures for:
to generate a complete Level 2A product which is ready for analysis.
2.1. Overview of the EnMAP Mission
The Environmental Mapping and Analysis Program (EnMAP,
www.enmap.org, accessed on 10 November 2021) is a spaceborne imaging spectroscopy mission under development and planned for launch in the first half-year of 2022 with an operational lifetime of 5 years [
3,
19]. The Space Agency of the German Aerospace Center (DLR) covers the mission management, and DLR’S Earth Observation Center (EOC) together with the German Space Operations Center (GSOC) are responsible for establishing and operating the ground segment [
20].
As the Science PI, the German Research Center for Geosciences (GFZ) is responsible for the science segment including an independent product validation [
21]. The OHB System AG is in charge of realising the space segment.
The spectral range of EnMAP covers
nm to
nm and comprises of 262 spectral bands in total, but not all are provided to the user. The EnMAP system design is based on a prism-based dual-spectrometer; the VNIR (Visible and Near Infrared) spectrometer covers the spectral range from
nm to
nm with a spectral sampling distance between
nm and
nm. The SWIR (Shortwave Infrared) spectrometer covers the spectral range from
nm to
nm with a spectral sampling distance between
nm and
nm. For both cameras, the spectral resolution is about a factor of
larger than the spectral sampling distance [
22]. The target signal-to-noise ratio (SNR) is 500:1 at
nm and 150:1 at
nm (at reference radiance level representing 30% surface albedo,
Sun zenith angle, ground at sea level, and
km visibility with rural atmosphere). In order to have a large dynamic range, the signal is fed to two parallel amplifiers with different gains for each of the two detectors. For the VNIR, an automatic gain switching is applied, and a fixed gain setting for the SWIR. The resulting radiometric resolution is 14 bits. The absolute radiometric calibration is based on Sun calibration measurements with a full-aperture diffuser. The relative calibration is based on an on-board integrating sphere coated with Spectralon and illuminated with a white LED (light emitting diode) and a Tungsten halogen lamp. A second doped Spectralon sphere enables a spectral accuracy of better than
nm in VNIR and
nm in SWIR. Additional measurements looking into deep space for monitoring shutter thermal emission and closed shutter measurements before and after each observation for subtraction of dark signal complement the calibration. Using these procedures, the target radiometric accuracy is better than 5% [
23].
Regarding the geometrical aspects of EnMAP data, each detector array has 1000 valid pixels in spatial direction with an instantaneous field-of-view (IFOV) of
arcsec. Thereby, a geometric resolution of
and a swath width (across-track) of
km is realized. A swath length (along-track) of
km can be acquired per day and an across-track tilt capability of
enables a target revisit time of less than 4 days. It is important to note that the VNIR and SWIR detector arrays are not spatially aligned, consequently there is a shift of approximately
arcsec along track which corresponds to approximately
m on ground. As detailed in
Section 2.4, the data products have a geolocation accuracy of
m with respect to a reference image based on selected Sentinel-2 Level 1C products having an absolute geolocation accuracy of
m [
24].
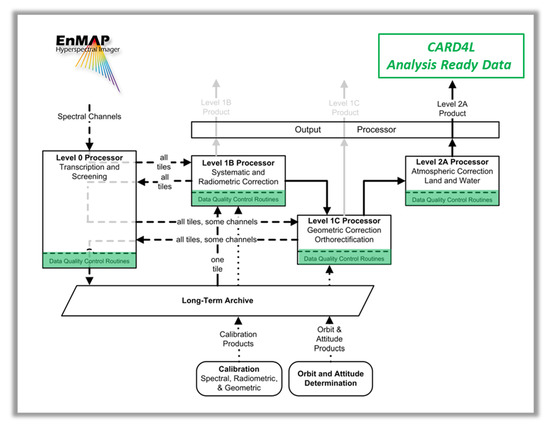
The fully-automatic processing chain generates image products at three levels and to a user selected format (image data in BSQ, BIL, BIP, JPEG2000, or GeoTIFF and metadata in XML) which are disseminated through web-based interfaces [
25], see
Section 2.6. Level 1B (L1B) products (
Section 2.2 and
Section 2.3) are corrected to Top-of-Atmosphere (TOA) radiances including defective pixel flagging, non-linearity correction, dark signal (and digital offset) correction, gain matching, straylight correction, radiometric/spectral referencing, radiometric calibration, and spectral defective pixel interpolation. Level 1C (L1C) products (
Section 2.4) are orthorectified to a user selected map projection (UTM, geographic, or European projection LAEA) and user selected resampling model (nearest neighbor, bi-linear interpolation, or cubic convolution). The physical sensor model is applied by the method of direct georeferencing with a correction of sensor interior orientation, satellite motion, light aberration and refraction, and terrain related distortions from raw imagery. Level 2A (L2A) (
Section 2.5) products are compensated for atmospheric effects to Bottom-of-Atmosphere (BOA) reflectances with separate algorithms for land and water applications. Therefore, a classification (e.g., land-water-background, cloud), aerosol optical thickness and also columnar water vapor estimation is performed to obtain surface reflectances including adjacency correction. For the land case the units are expressed as remote sensing reflectance. For water bodies, as specified by the user, reflectances can be output either as normalized water leaving remote sensing reflectance or subsurface irradiance reflectance. For all processing levels the inclusion of procedures for generating per-pixel quality information and rich metadata is an integral part and was detailed during the evolution of the mission [
26].
The expected image product quality is analyzed pre-launch using a simulation chain [
27,
28,
29] to emulate input instrument data and the processing chain [
25]. Both chains are independent of each other, and were continuously updated using the latest results of the instrument laboratory characterization. The calibration activities are complemented by data quality control [
26] and by independent validation activities [
21]. These activities are based on already established calibration/validation procedures, sites and networks such as AERONET [
30], CEOS RadCalNet [
31], pseudo invariant calibration sites (PICS) and products of other missions [
32]. In addition, before launch, simulated EnMAP test data products are available at
www.enmap.org, accessed on 10 November 2021.
2.2. Level 0 Processing and Related Metadata
The Level 0 processor is responsible for treating the downlinked data received by the ground stations and thereby putting together the raw image data of the cameras. In addition, the processor compiles an extensive set of both low- and high-level information, including instrument status, quality indicators as well as geometric, radiometric and atmospheric characteristics. The collection of high-level information is made possible by running the full processor chain (up to Level 2A) during Level 0 processing. Level 0 products therefore contain a rich body of metadata and quality layers. Note that only internal users have access to Level 0 products.
An Earth datatake in EnMAP consists of an Earth-looking phase of variable length encompassed by dark phases at the beginning and end of imaging. The Level 0 processor combines the dark phases into one single product called DC and splits the Earth-looking phase into tiles of 1024 frames with each tile corresponding to a so-called L0 product.
The components of an L0 product are depicted in
Figure 1. The component L0-SPECTRAL-IMAGE provides the decompressed raw spectral image data for the Earth tile separately for VNIR and SWIR. Both spectral images are provided in digital numbers (DN) in BIL format with dimensions 1024 frames × 95 channels × 1024 pixels for VNIR and 1024 frames × 135 channels × 1024 pixels for SWIR, covering an area of approximately 30 km by 30 km on the ground. The spectral characterisation for each channel (namely, centre wavelength and full width half maximum) can be found in the accompanying L0 metadata. The virtual channels containing housekeeping data collected during the imaging of the Earth tile are saved in component L0-VC-DATA.
In addition, the extensive set of quality information collected during the temporary processing up to Level 2A is given in the dedicated L0-QL component. This component includes RGB quicklooks of the VNIR and SWIR spectral images in the product, quality layers (classes, clouds, cloud shadows, haze, cirrus, snow, quality test flags) and defective pixel masks for VNIR and SWIR. A detector map containing frame-averaged at-sensor radiances for each detector element is provided in component L0-DM for each camera. These files are a heritage from the quality control of airborne hyperspectral sensors [
33] and are used for online and interactive quality checks for EnMAP and DESIS [
26]. All files in L0-QL and L0-DM are provided in GeoTIFF format. Finally, the comprehensive array of Level 0 metadata is given in a dedicated XML file, while detailed history and log information regarding the processing up to L2A are also provided in XML format for documentation and troubleshooting of eventual problems. The full description of metadata and per-pixel quality information is provided in
Section 3.1.
2.3. Level 1B Processing and Related Metadata
The aim of the Level 1B processor is to convert the Level 0 raw image data into at-sensor radiances by using the available calibration data of the instrument and in the process collect important quality indicators. The processor is divided in to two sub-processors: L1B_rad, responsible for radiometric calibration and quality control, and L1B_int, responsible for the interpolation of the defective pixels identified during L1B_rad as well as the correction of a pixel-wise spectral shift in the possible case of an occurring smile effect. As in Level 0, higher-level processing (up to Level 2A) is done during Level 1B in order to retrieve quality layers. The resulting L1B product is a fully calibrated and spectrally referenced radiometric product providing at-sensor radiances accompanied by comprehensive per-pixel quality indicators and high-level information. Unlike L0 products, L1B products are accessible to all users.
L1B_rad accepts as input the raw L0 product image data corresponding to an Earth tile and a set of calibration tables characterizing the EnMAP instrument at the time of imaging. The raw image pixels are then corrected for non-linearity, dark signal, digital offset, electronic offset, gain, response non-uniformity and straylight before applying channel-wise calibration coefficients to derive at-sensor radiances. Both raw and calibrated image data are controlled for quality and extensive quality layers and metadata are compiled. In particular, quality control identifies a mask of defective pixels which are marked for interpolation.
L1B_int then proceeds to the interpolation of the identified defective pixels. An accurate spectral interpolation in TOA radiance space is challenging due to many narrow spectral features caused by the non-blackbody nature of the solar irradiance (including Fraunhofer lines), as well as absorption in the Earth atmosphere. Therefore, the TOA radiances are converted to the spectrally smoother BOA reflectance by applying a simplified atmospheric correction, followed by a linear interpolation.
The interpolation process conditionally adapts to the image data condition, taking potential data losses into account. For the nominal case of non-consecutive band appearance of defective pixels, linear interpolation is performed in the spectral domain of the smooth BOA spectra. For occurrences of defective pixels in several consecutive bands or a local abundance of data loss, interpolation automatically switches to the spatial dimension.
Further, should the application of a spectral smile correction be identified as necessary during the mission, this process is also applied during L1B_int run time. Smile correction for EnMAP data is implemented in a two-fold approach: As a first step, during the simplified atmospheric correction applied in L1B_int, the pixel-wise spectral shifts are considered individually, estimating the according BOA reflectance for the particular shifted wavelength. This procedure is termed smile-aware atmospheric correction. In a second step, the non-nominal BOA reflectance values of each band are linearly interpolated to the mutual center wavelength value as defined by the nominal spectral calibration tables of the sensor.
Finally, an inversion of the atmospheric correction is applied to the defective pixel and smile corrected reflectances back to TOA radiances for L1B user output and subsequent L1C processing.
Figure 2 shows the components of an L1B product. The L1B at-sensor radiance data in units of W/m
/sr/nm are saved separately for VNIR and SWIR in the L1B-SPECTRAL-IMAGE component. The spectral images are provided in a format specified by the user (GeoTIFF, Envi binary BIL/BSQ/BIP or JPEG2000) with dimensions 1024 frames × 91 channels × 1000 pixels for VNIR and 1024 frames × 131 channels × 1000 pixels for SWIR (exact dimensions may change during the commissioning phase). The number of channels and pixels in the L1B products is smaller than in the L0 product (cf.
Section 2.2), because the extremities of the detectors are not illuminated. These dark channels and pixels are removed during L1B processing. The spectral characterisation for each channel (namely, centre wavelength and full width half maximum) can be found in the accompanying L1B metadata. Note that the two spectral images are in sensor geometry and do not correspond to the same footprint on the ground. The merging and geometric correction of the image cubes is performed during Level 1C processing. The component L1B-QL contains all the quality information gathered during Level 1B processing, including RGB quicklooks for VNIR and SWIR, quality layers (classes, clouds, cloud shadows, haze, cirrus, snow, quality test flags for VNIR and SWIR) and defective pixel masks for VNIR and SWIR. All files in this component are provided in GeoTIFF format. The full Level 1B metadata is documented in XML format. Lastly, history and log information regarding the processing are given in XML format in dedicated components, but these are not delivered to the user.
2.4. Level 1C Processing and Related Metadata
In the L1C processing, direct georeferencing is used to orthorectify the L1B image data of both VNIR and SWIR sensors, resulting in a single spectral cube (see
Figure 3). For this purpose, the physical sensor model and the measured AOCS data (orbit and attitude) are applied [
34]. The user can choose between the map projections UTM, Geographic and LAEA (European projection) and the resampling methods nearest neighbor, bilinear and cubic convolution. The geolocation accuracy—when using only the AOCS data—is better than 100 m. To improve the geolocation accuracy to better than 30 m with respect to the reference image, ground control points (GCP) are used. For this purpose, a reference image database has been generated, consisting of Sentinel-2 images with low cloud coverage. By using Sentinel-2 data as a reference and the Copernicus DEM (GLO-30), this ensures a high relative geometric consistency between EnMAP and Sentinel-2 data and allows for an easy integration in multi-sensoral time-series. Using an intensity based image matching technique, matching points are found and split into GCP and independent control points (ICP). The GCP are used to improve the accuracy of the direct georeferencing, while the ICP are used to calculate and provide the root mean square error (RMSE) to the user in the metadata file [
35]. The results of the matching, i.e., number of matching points, number of GCP, number of ICP, number of GCP discarded by blunder detection, and number of tiles are written to the metadata file as well as the accuracy measurements, i.e., RMSE at ICP (x, y, xy), residuals at GCP (x, y, xy) and mean at GCP (x, y, xy). During the orthorectification, the VNIR and SWIR data are also coregistered and merged to one image cube. Rational polynomial coefficients (RPC) are generated and provided to the user in the metadata.
2.5. Level 2A Processing and Related Metadata
Within the overall EnMAP design, the option for generating a
“land” (BOA reflectance) as well as two
“water” products (BOA water leaving reflectance as well as BOA subsurface reflectance) are provided. The L2A water algorithm is based on the Module Inversion Program (MIP) [
36], and is not further described within this paper. The EnMAP Level 2A land processor is based on PACO [
37] (Python-Based Atmospheric Correction, see also [
1] for its implementation as DESIS L2A processor). PACO is a descendant of the well-known ATCOR [
38,
39]. Because of this heritage, the advantages and shortcomings are well understood, and the good overall performance is shown in the results of many comparison studies [
40].
The L2A processor corrects the effects of the Earth’s atmosphere and, optionally, the surface terrain elevation, to retrieve the reflectance of each sensor pixel. The land processor derives the same surface reflectance product for land and water pixels. The algorithms are based on inversion algorithms taking into account radiative transfer simulations of the Earth’s atmosphere (based on MODTRAN 5.4.0 [
41]), which are provided together with the software as LUTs (Look-Up-Tables). If required by the user, the algorithms also correct for single elevation and the contribution of diffuse signal originating from adjacent pixels. The result is a Lambertian surface reflectance irradiance (multiplied by pi) per pixel, together with other processor by-products (e.g., pixel classification or Quality Layers) calculated during the atmospheric correction. Also of importance are the calculated per-pixel aerosol optical thickness and water vapor values, which are used internally to determine the radiative transfer functions per pixel. As mentioned before, the user product for the Level 2A data contains the full processing information from Level 0 onward, including metadata and quality layers (see
Figure 4).
Using external MODIS databases [
42,
43], the land processor makes a very preliminary selection of the radiative transfer function to be used based on season and corrects for the atmosphere ozone column. Within the atmospheric correction process, there is the need to specify the solar irradiance (E0) model. While in theory the EnMAP L2A processor can incorporate various E0 models, the decision was made to use the high resolution solar spectral irradiance of Fontenla 2011 [
44] model, because during Sun calibration (solar diffuser measurements) assumptions on the solar irradiance are also incorporated. Using the identical E0 model within the mission, the mandatory consistency between the E0 model used within the calibration procedures and the atmospheric correction is ensured. As required within the CEOS guidelines, the solar irradiance model is properly referenced within the processor documentation and will be made publicly available on the mission website.
2.6. Archiving and Access to Data and Metadata
There are two major scenarios for the users to obtain standardized products. Users can either apply for new image acquisitions on the basis of requests, or products are generated based on archival data. Proposals, acquisitions, and associated research are presented by an interactive map supporting the establishment of a world-wide user network. In case of tasking conflicts, issued acquisitions are prioritized primarily based on historical and current cloud cover information taking satellite constraints such as power and storage into account. All observations will be long-term archived together with quality parameters.
The catalogue search and order service (EOWEB
®GeoPortal) allows all registered users to search and browse data sets and products, that are described by corresponding ISO (International Organization for Standardization) metadata sets, and to visualize these products based on the CSW (Catalog Service for the Web) and WMS (Web Mapping Service) protocols standardized by the OGC (Open Geospatial Consortium) (see
Figure 5). It is realized using GDAS (Geospatial Data Access Services) and goes beyond the INSPIRE regulation requirements to provide full range and large scale services including help-desk functionalities [
45]. This also enables interoperable data access by external partners or OGC-compliant client software. Due to required multiple processing options, each product is generated specifically for the order and delivered using SFTP (secure file transfer protocol) provided by multi-mission facilities [
25,
46]. An inherent challenge in providing the described metadata related to the orthorectification and atmospheric correction quality is the required provision of information from L1B, L1C and L2A processing for L0 data. In case all higher-level products are already generated and archived, any improvements in the processing software and calibration would cause problems: either the data are static and thus any progress is discarded, or re-processing of the entire archive is required. One prominent example of the latter approach are the Landsat collections [
47].
For EnMAP, the design is such that all incoming raw L0 data are processed up to L2A, and then archived as uncalibrated L0 products including extensive metadata. This means that all the information from geocoding (incl. geometric accuracy of this particular dataset) and from atmospheric correction (incl. scene AOT and WV contents) are generated and made available within the archived data, and are also searchable in the catalogue (see also
Section 2.5). In addition, all data sets can easily be re-processed on demand with the latest processor versions and calibration information.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}