
As-Textured As-Built BIM Using Sensor Fusion, Zee Ain Historical Village as a Case Study



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Fusion of TLS and UAV photogrammetry data to enhance digitizing HBIM with complete mapping information.
- A flexible method for photorealistic texture mapping of HBIM using True orthophoto generated from laser point and close-range imagery.
- Developed digital content of Zee Ain historical village to help satisfy UNESCO’s World Heritage nomination file requirements.
2. Zee Ain Heritage Village
3. Data Collection
4. TLS and UAV Data Fusion
5. BIM Implementation
6. As-Textured As-Built BIM
7. Discussion
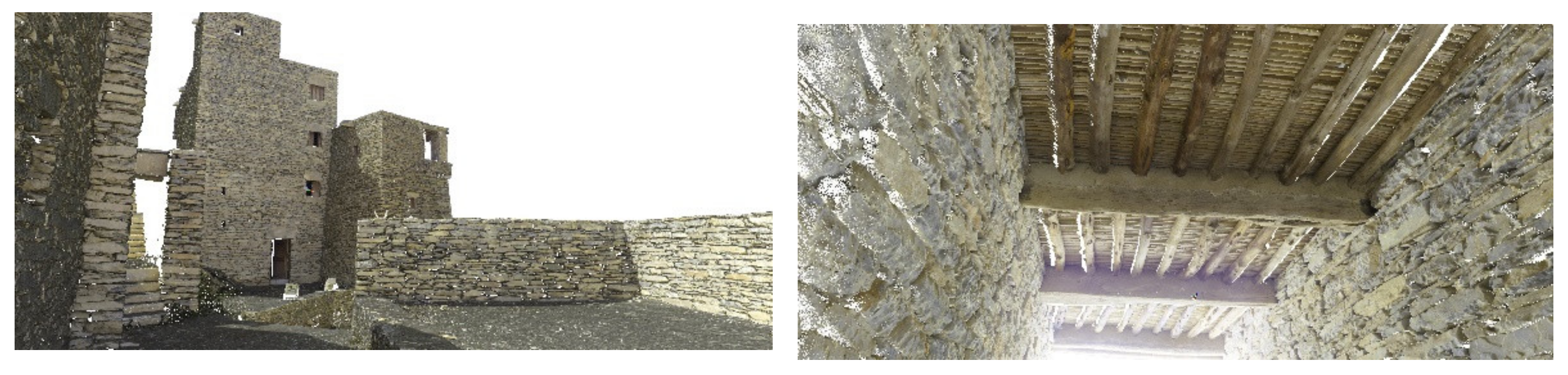
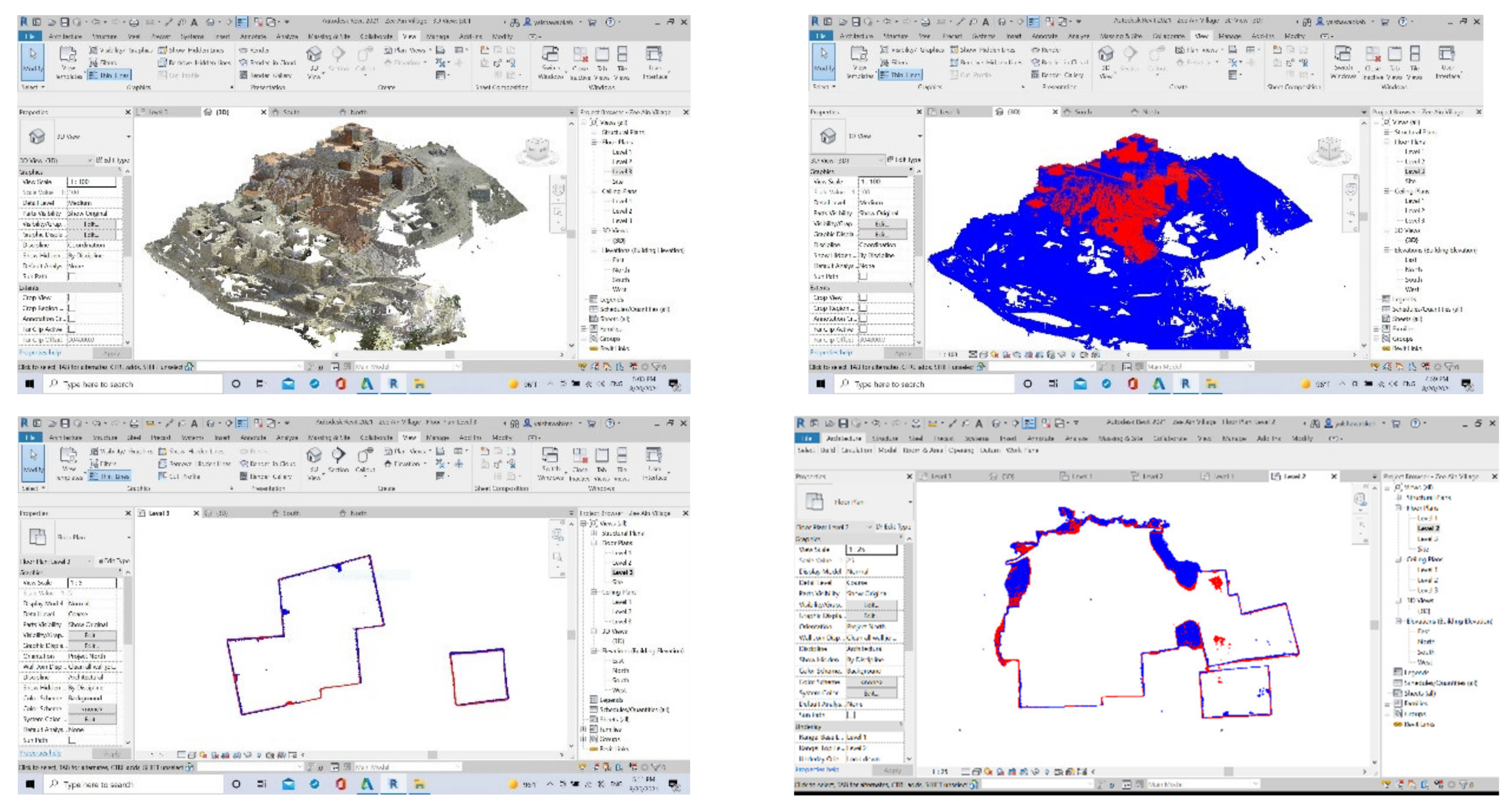
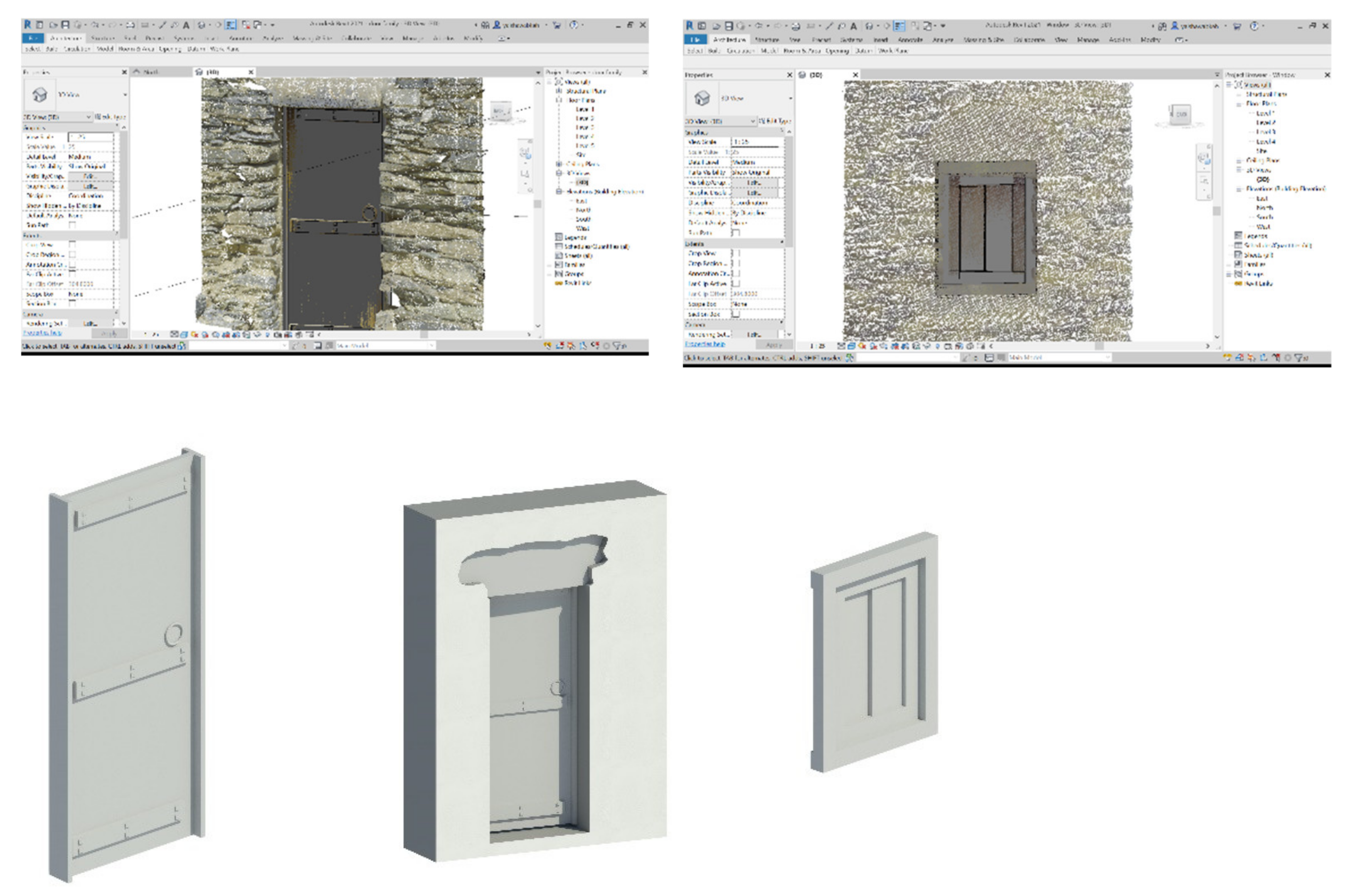
- As stated in Section 2, several methods have been developed within the scientific community to improve the interpretation and plotting of occluded objects in laser point clouds using non-metric images [13,37]. Tracing object features in 2D images with no scale information will not ensure accurate tracing and positioning of object shapes in the corresponding laser data; instead, the proposed method identifies complex and irregular objects in the context of a scaled dense point cloud acquired using nadir and oblique point clouds that are effectively blended with TLS data. These elements were not only geometrically reconstructed in detail, but they were also located in their correct position in the architectural framework, with their corresponding topological information, which also improves the tracing of the parametric objects in the BIM platform, as seen in Figure 15 and Figure 16.
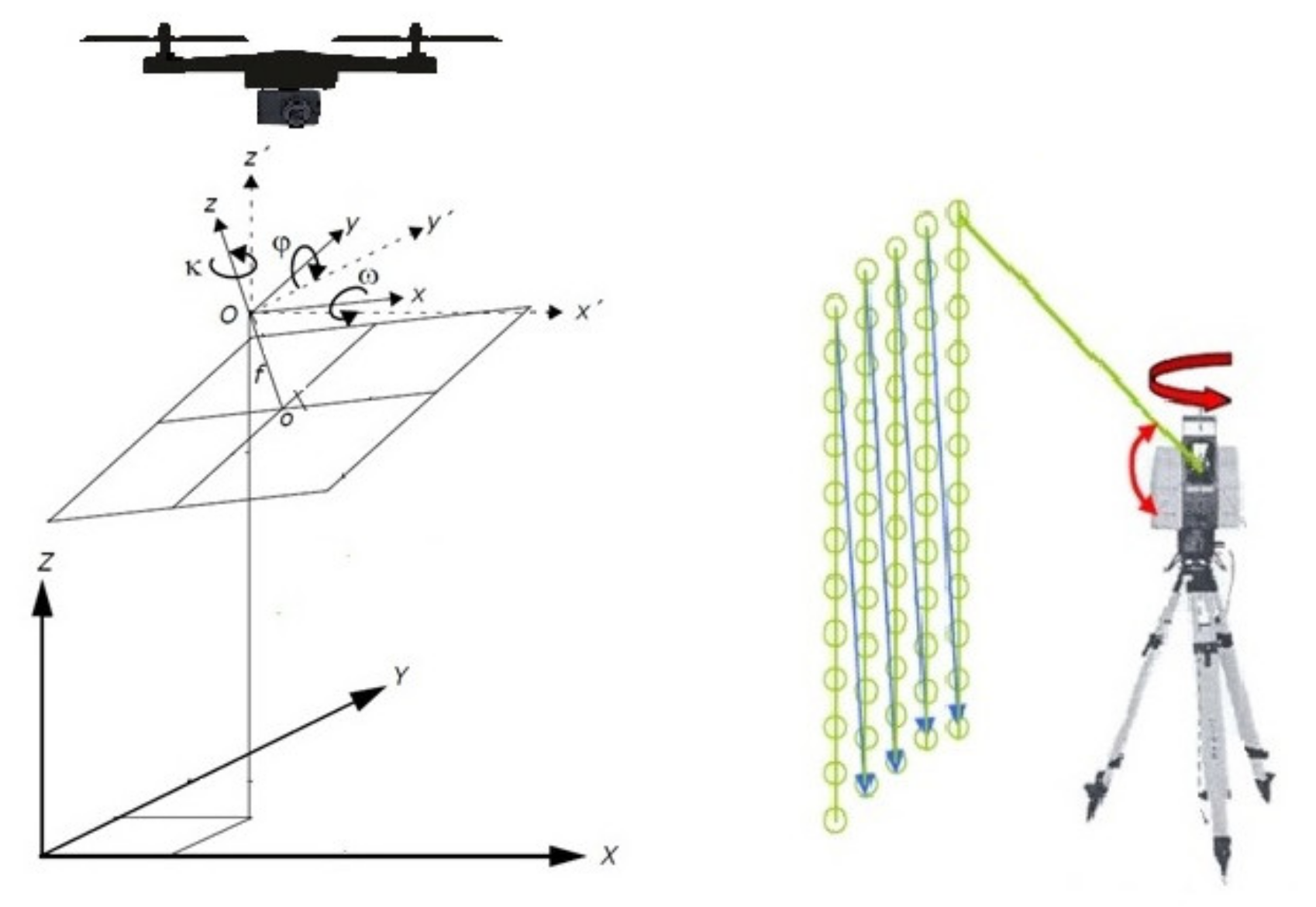
- Banfi et al. [46] developed a novel web-immersive texture mapping method based on a synchronized mapping technique of multiple modeling software in an extended reality platform. The orthophotos used for web immersive texture mapping were generated by photogrammetric survey using different convergent images. Brumana et al. [45] used a 3D photogrammetric orthoimage to accurately determine the surface profile and thickness of laser scanning data. The main challenge in producing orthophotos of complex buildings using photogrammetry image blocks are the texture less elements that affect the efficiency of the processing SFM algorithms used for building the DSM. In addition, close-spaced images have to be successfully matched, and that can be difficult in large and complex structures. Error propagation and noisy point clouds result from long image sequences of large-scale structure. Furthermore, radiometric variation in different images can result in matching failures [32,50]. Our proposed method, on the other hand, makes use of a true orthophoto generated from a dense laser point cloud. The dense DSM generated by a laser scanner device is the best solution for a complete and accurate 3D representation of a complex structure, allowing for high-resolution sampling of the produced true orthophoto. The method is flexible, since images can be taken from the TLS internal camera or external camera, as can be depicted in Figure 23, with accuracy up to 1 mm, where single or multiple images can be used for orthophoto production and HBIM texturing as can be depicted in Figure 24.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Conti, A.; Fiorini, L.; Massaro, R.; Santoni, C.; Tucci, G. HBIM for the preservation of a historic infrastructure: The Carlo III bridge of the Carolino Aqueduct. Appl. Geomat. 2020, 1–11. [Google Scholar] [CrossRef]
- Trizio, I.; Savini, F.; Giannangeli, A.; Boccabella, R.; Petrucci, G. The Archaeological Analysis of Masonry for the Restoration Project in Hbim. In Proceedings of the 8th Intl. Workshop 3D-ARCH “3D Virtual Reconstruction and Visualization of Complex Architectures”, Bergamo, Italy, 6–8 February 2019; pp. 715–722. [Google Scholar] [CrossRef] [Green Version]
- Costantino, D.; Pepe, M.; Restuccia, A. Scan-to-HBIM for conservation and preservation of Cultural Heritage building: The case study of San Nicola in Montedoro church (Italy). Appl. Geomat. 2021, 1–15. [Google Scholar] [CrossRef]
- Bruno, S.; Musicco, A.; Fatiguso, F.; Dell’Osso, G.R. The Role of 4D Historic Building Information Modelling and Management in the Analysis of Constructive Evolution and Decay Condition within the Refurbishment Process. Int. J. Arch. Herit. 2019, 15, 1250–1266. [Google Scholar] [CrossRef]
- Tsilimantou, E.; Delegou, E.T.; Nikitakos, I.A.; Ioannidis, C.; Moropoulou, A. GIS and BIM as Integrated Digital Environments for Modeling and Monitoring of Historic Buildings. Appl. Sci. 2020, 10, 1078. [Google Scholar] [CrossRef] [Green Version]
- Pepe, M.; Costantino, D.; Restuccia Garofalo, A. An Efficient Pipeline to Obtain 3D Model for HBIM and Structural Analysis Purposes from 3D Point Clouds. Appl. Sci. 2020, 10, 1235. [Google Scholar] [CrossRef] [Green Version]
- Godinho, M.; Machete, R.; Ponte, M.; Falcão, A.P.; Gonçalves, A.; Bento, R. BIM as a resource in heritage management: An application for the National Palace of Sintra, Portugal. J. Cult. Herit. 2019, 43, 153–162. [Google Scholar] [CrossRef]
- Nieto-Julián, J.E.; Antón, D.; Moyano, J.J. Implementation and Management of Structural Deformations into Historic Building Information Models. Int. J. Arch. Herit. 2019, 14, 1384–1397. [Google Scholar] [CrossRef]
- Poux, F.; Billen, R.; Kasprzyk, J.-P.; Lefebvre, P.-H.; Hallot, P. A Built Heritage Information System Based on Point Cloud Data: HIS-PC. ISPRS Int. J. Geo-Inf. 2020, 9, 588. [Google Scholar] [CrossRef]
- Banfi, F. HBIM, 3D drawing and virtual reality for archaeological sites and ancient ruins. Virtual Archaeol. Rev. 2020, 11, 16–33. [Google Scholar] [CrossRef]
- Baik, A. The Use of Interactive Virtual BIM to Boost Virtual Tourism in Heritage Sites, Historic Jeddah. ISPRS Int. J. Geo-Inf. 2021, 10, 577. [Google Scholar] [CrossRef]
- Sampaio, A.; Pinto, A.; Gomes, A.; Sanchez-Lite, A. Generation of an HBIM Library regarding a Palace of the 19th Century in Lisbon. Appl. Sci. 2021, 11, 7020. [Google Scholar] [CrossRef]
- López, F.J.; Lerones, P.M.; Llamas, J.; Gómez-García-Bermejo, J.; Zalama, E. A Review of Heritage Building Information Modeling (H-BIM). Multimodal Technol. Interact. 2018, 2, 21. [Google Scholar] [CrossRef] [Green Version]
- Murphy, M.; McGovern, E.; Pavia, S. Historic building information modelling (HBIM). ISPRS J. Photogramm. Remote Sens. 2009, 27, 311–327. [Google Scholar] [CrossRef] [Green Version]
- Fryskowska, A.; Stachelek, J. A no-reference method of geometric content quality analysis of 3D models generated from laser scanning point clouds for hBIM. J. Cult. Herit. 2018, 34, 95–108. [Google Scholar] [CrossRef]
- Bagnolo, V.; Argiolas, R.; Cuccu, A. Hbim for archaeological sites: From sfm based survey to algorithmic modeling. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 57–63. [Google Scholar] [CrossRef] [Green Version]
- Andriasyan, M.; Moyano, J.; Nieto-Julián, J.E.; Antón, D. From Point Cloud Data to Building Information Modelling: An Automatic Parametric Workflow for Heritage. Remote Sens. 2020, 12, 1094. [Google Scholar] [CrossRef] [Green Version]
- Quattrini, R.; Malinverni, E.S.; Clini, P.; Nespeca, R.; Orlietti, E. From tls to hbim. high quality semantically-aware 3d modeling of complex architecturE. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 367–374. [Google Scholar] [CrossRef] [Green Version]
- López, F.J.; Lerones, P.M.; Llamas, J.; Gómez-García-Bermejo, J.; Zalama, E. A framework for using point cloud data of Heritage buildings towards geometry modeling in a BIM context: A case study on Santa Maria la Real de Mave Church. Int. J. Arch. Herit. 2017, 11, 965–986. [Google Scholar] [CrossRef]
- Barrile, V.; Fotia, A.; Bilotta, G. Geomatics and augmented reality experiments for the cultural heritage. Appl. Geomat. 2018, 10, 569–578. [Google Scholar] [CrossRef]
- Remondino, F. Heritage Recording and 3D Modeling with Photogrammetry and 3D Scanning. Remote Sens. 2011, 3, 1104–1138. [Google Scholar] [CrossRef] [Green Version]
- Dostal, C.; Yamafune, K. Photogrammetric texture mapping: A method for increasing the Fidelity of 3D models of cultural heritage materials. J. Archaeol. Sci. Rep. 2018, 18, 430–436. [Google Scholar] [CrossRef]
- Gines, J.L.C.; Cervera, C.B. Toward Hybrid Modeling and Automatic Planimetry for Graphic Documentation of the Archaeological Heritage: The Cortina Family Pantheon in the Cemetery of Valencia. Int. J. Arch. Herit. 2019, 14, 1210–1220. [Google Scholar] [CrossRef]
- Chiabrando, F.; Sammartano, G.; Spanò, A.; Spreafico, A. Hybrid 3D Models: When Geomatics Innovations Meet Extensive Built Heritage Complexes. ISPRS Int. J. Geo-Inf. 2019, 8, 124. [Google Scholar] [CrossRef] [Green Version]
- Šašak, J.; Gallay, M.; Kaňuk, J.; Hofierka, J.; Minár, J. Combined Use of Terrestrial Laser Scanning and UAV Photogrammetry in Mapping Alpine Terrain. Remote Sens. 2019, 11, 2154. [Google Scholar] [CrossRef] [Green Version]
- Moyano, J.; Nieto-Julián, J.E.; Bienvenido-Huertas, D.; Marín-García, D. Validation of Close-Range Photogrammetry for Architectural and Archaeological Heritage: Analysis of Point Density and 3d Mesh Geometry. Remote Sens. 2020, 12, 3571. [Google Scholar] [CrossRef]
- Themistocleous, K.; Agapiou, A.; Hadjimitsis, D. 3D documentation and bim modeling of cultural heritage structures using uavs: The case of the foinikaria church. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 42, 45–49. [Google Scholar] [CrossRef] [Green Version]
- Mikita, T.; Balková, M.; Bajer, A.; Cibulka, M.; Patočka, Z. Comparison of Different Remote Sensing Methods for 3D Modeling of Small Rock Outcrops. Sensors 2020, 20, 1663. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tscharf, A.; Rumpler, M.; Fraundorfer, F.; Mayer, G.; Bischof, H. On The Use Of uavs in mining and archaeology-geo-accurate 3d reconstructions using various platforms and terrestrial views. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2, 15–22. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.; Zhang, Y. Using Drones and 3D Modeling to Survey Tibetan Architectural Heritage: A Case Study with the Multi-Door Stupa. Sustainability 2018, 10, 2259. [Google Scholar] [CrossRef] [Green Version]
- Arza-García, M.; Gil-Docampo, M.; Ortiz, J. A hybrid photogrammetry approach for archaeological sites: Block alignment issues in a case study (the Roman camp of A Cidadela). J. Cult. Herit. 2019, 38, 195–203. [Google Scholar] [CrossRef]
- Schonberger, J.L.; Frahm, J.-M. Structure-from-Motion Revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar]
- Alshawabkeh, Y.; Baik, A.; Miky, Y. Integration of Laser Scanner and Photogrammetry for Heritage BIM Enhancement. ISPRS Int. J. Geo-Inf. 2021, 10, 316. [Google Scholar] [CrossRef]
- Rocha, G.; Mateus, L.; Fernández, J.; Ferreira, V. A Scan-to-BIM Methodology Applied to Heritage Buildings. Heritage 2020, 3, 47–67. [Google Scholar] [CrossRef] [Green Version]
- Castilla, F.; Ramón, A.; Adán, A.; Trenado, A.; Fuentes, D. 3D Sensor-Fusion for the Documentation of Rural Heritage Buildings. Remote Sens. 2021, 13, 1337. [Google Scholar] [CrossRef]
- Alshawabkeh, Y. Color and Laser Data as a Complementary Approach for Heritage Documentation. Remote Sens. 2020, 12, 3465. [Google Scholar] [CrossRef]
- Sztwiertnia, D.; Ochałek, A.; Tama, A.; Lewińska, P. HBIM (heritage Building Information Modell) of the Wang Stave Church in Karpacz–Case Study. Int. J. Arch. Herit. 2019, 15, 713–727. [Google Scholar] [CrossRef]
- Martín-Lerones, P.; Olmedo, D.; López-Vidal, A.; Gómez-García-Bermejo, J.; Zalama, E. BIM Supported Surveying and Imaging Combination for Heritage Conservation. Remote Sens. 2021, 13, 1584. [Google Scholar] [CrossRef]
- Brutto, M.L.; Iuculano, E.; Giudice, P.L. Integrating topographic, photogrammetric and laser scanning techniques for a scan-to-bim process. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 883–890. [Google Scholar] [CrossRef]
- Banfi, F.; Previtali, M.; Stanga, C.; Brumana, R. A layered-web interface based on hbim and 360° panoramas for historical, material and geometric analysis. In Proceedings of the 8th International Workshop on 3D Virtual Reconstruction and Visualization of Complex Architectures, Bergamo, Italy, 6–8 February 2019; pp. 73–80. [Google Scholar] [CrossRef] [Green Version]
- Fregonese, L.; Taffurelli, L.; Adami, A.; Chiarini, S.; Cremonesi, S.; Helder, J.; Spezzoni, A. Survey and modelling for the bim of basilica of san marco in venice. In Proceedings of the 2017 TC II and CIPA-3D Virtual Reconstruction and Visualization of Complex Architectures, Nafplio, Greece, 1–3 March 2017; pp. 303–310. [Google Scholar] [CrossRef] [Green Version]
- Malinverni, E.S.; Mariano, F.; Di Stefano, F.; Petetta, L.; Onori, F. Modelling in hbim to document materials decay by a thematic mapping to manage the cultural heritage: The case of “chiesa della pietà” in fermo. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 777–784. [Google Scholar] [CrossRef] [Green Version]
- Santagati, C.; Papacharalambous, D.; Sanfilippo, G.; Bakirtzis, N.; Laurini, C.; Hermon, S. HBIM approach for the knowledge and documentation of the St. John the Theologian cathedral in Nicosia (Cyprus). J. Archaeol. Sci. Rep. 2021, 36, 102804. [Google Scholar] [CrossRef]
- Lanzara, E.; Scandurra, S.; Musella, C.; Palomba, D.; di Luggo, A.; Asprone, D. Documentation of structural damage and material decay phenomena in h-bim systems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLVI-M-1-2021, 375–382. [Google Scholar] [CrossRef]
- Brumana, R.; Condoleo, P.; Grimoldi, A.; Banfi, F.; Landi, A.G.; Previtali, M.; Brumana, R.; Condoleo, P.; Grimoldi, A.; Banfi, F.; et al. HR LOD Based HBIM to Detect Influences on Geometry and Shape by Stere-otomic Construction Techniques of Brick Vaults. Appl. Geomat. 2018, 10, 529–543. [Google Scholar] [CrossRef]
- Banfi, F.; Mandelli, A. Computer Vision Meets Image Processing and UAS PhotoGrammetric Data Integration: From HBIM to the eXtended Reality Project of Arco della Pace in Milan and Its Decorative Complexity. J. Imaging 2021, 7, 118. [Google Scholar] [CrossRef]
- Unesco Word Heritage Center. Available online: https://whc.unesco.org/en/tentativelists/6031/ (accessed on 17 August 2021).
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Fritsch, M.; Clemen, C.; Kaden, R. 3D landscape objects for building information models (bim). ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 67–74. [Google Scholar] [CrossRef] [Green Version]
- Remondino, F.; Nocerino, E.; Toschi, I.; Menna, F. A critical review of automated photogrammetric processing of large datasets. In Proceedings of the 26th International CIPA Symposium 2017, Ottawa, ON, Canada, 28 August–1 September 2017; pp. 591–599. [Google Scholar] [CrossRef] [Green Version]



























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshawabkeh, Y.; Baik, A.; Fallatah, A. As-Textured As-Built BIM Using Sensor Fusion, Zee Ain Historical Village as a Case Study. Remote Sens. 2021, 13, 5135. https://doi.org/10.3390/rs13245135
Alshawabkeh Y, Baik A, Fallatah A. As-Textured As-Built BIM Using Sensor Fusion, Zee Ain Historical Village as a Case Study. Remote Sensing. 2021; 13(24):5135. https://doi.org/10.3390/rs13245135
Chicago/Turabian StyleAlshawabkeh, Yahya, Ahmad Baik, and Ahmad Fallatah. 2021. "As-Textured As-Built BIM Using Sensor Fusion, Zee Ain Historical Village as a Case Study" Remote Sensing 13, no. 24: 5135. https://doi.org/10.3390/rs13245135
APA StyleAlshawabkeh, Y., Baik, A., & Fallatah, A. (2021). As-Textured As-Built BIM Using Sensor Fusion, Zee Ain Historical Village as a Case Study. Remote Sensing, 13(24), 5135. https://doi.org/10.3390/rs13245135