Assessing Geomorphic Change in Restored Coastal Dune Ecosystems Using a Multi-Platform Aerial Approach


Abstract
:1. Introduction
1.1. Coastal Foredunes
1.2. UAS and Coastal Geomorphology
- Investigate the relationship between coastal foredune morphodynamics and foredune restoration.
- Quantify spatial-temporal differences in sediment erosion and deposition patterns, as they pertain to changes in vegetation cover, between 2016-20.
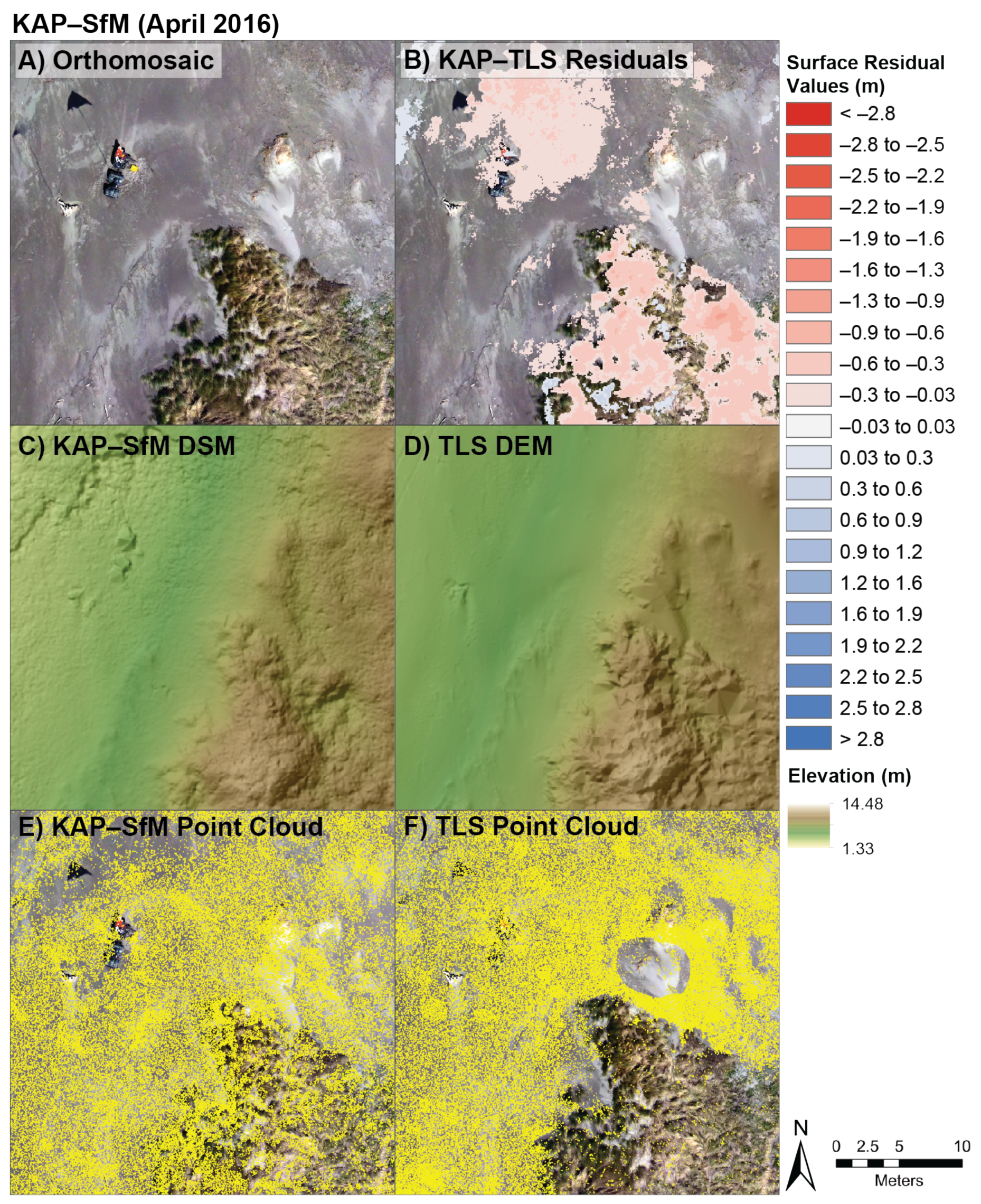
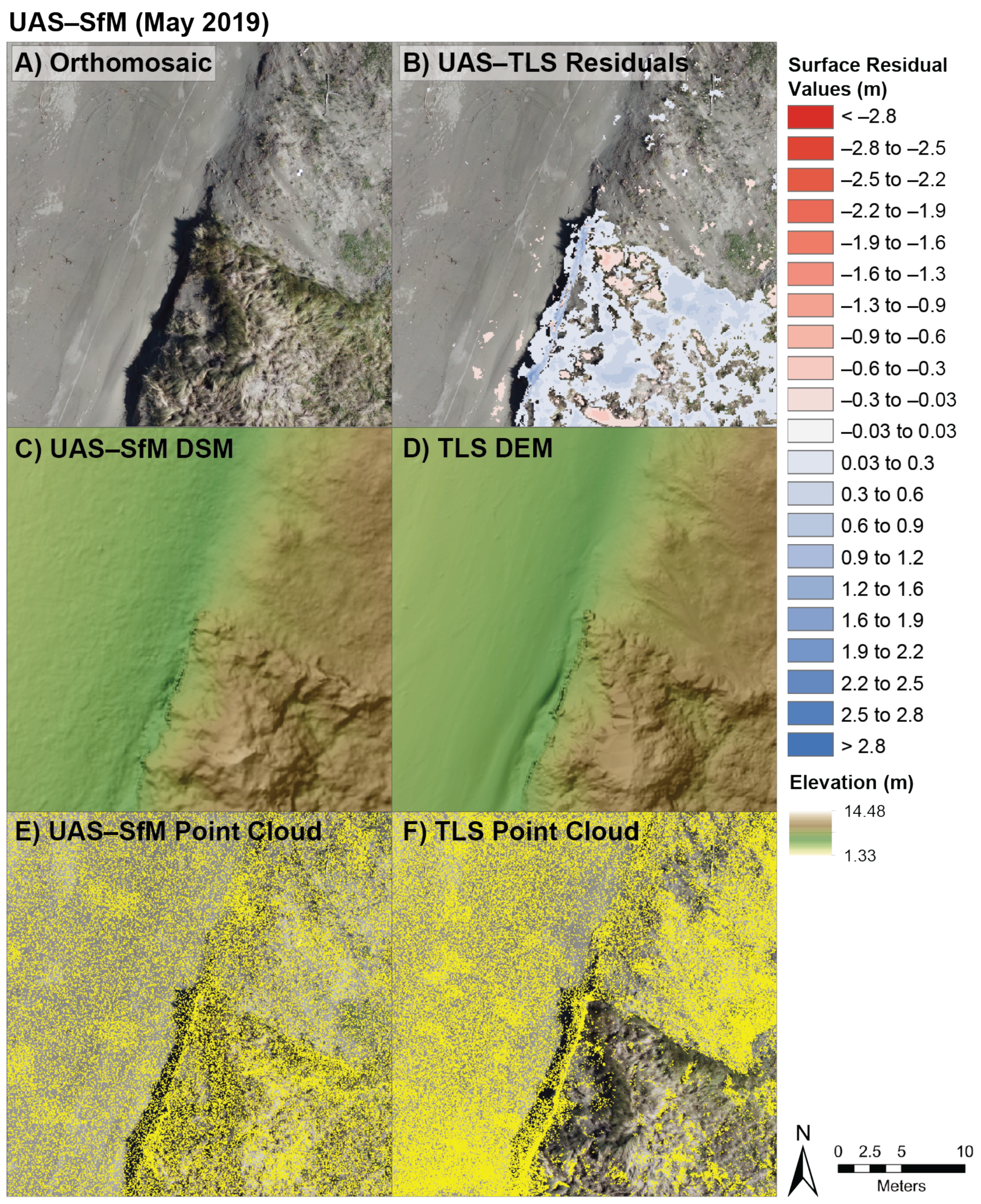
- Compare KAP- and UAS-SfM products against concurrently collected, higher resolution TLS reference surfaces to assess factors driving inter-platform differences.
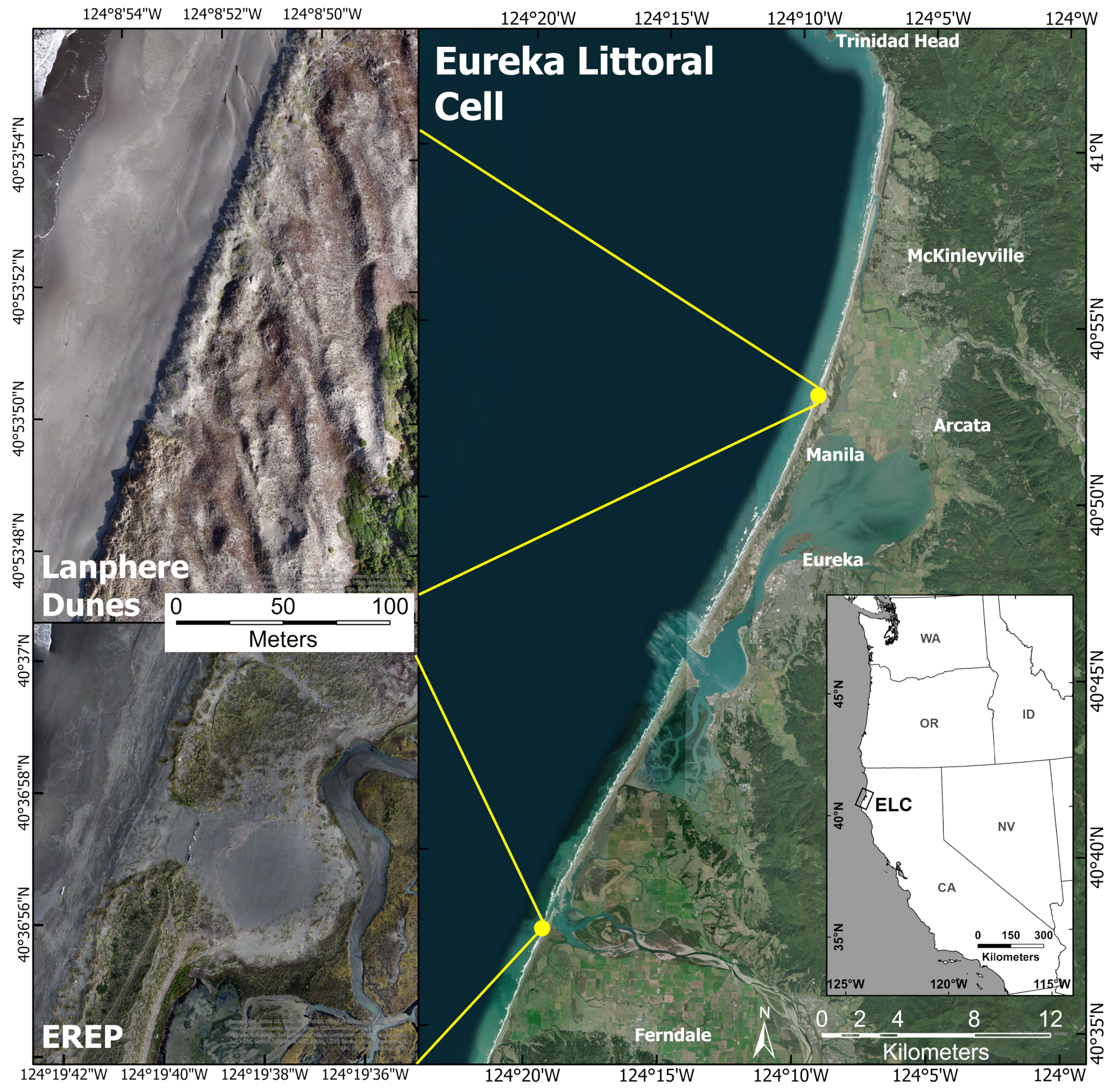
2. Study Area
2.1. Eureka Littoral Cell
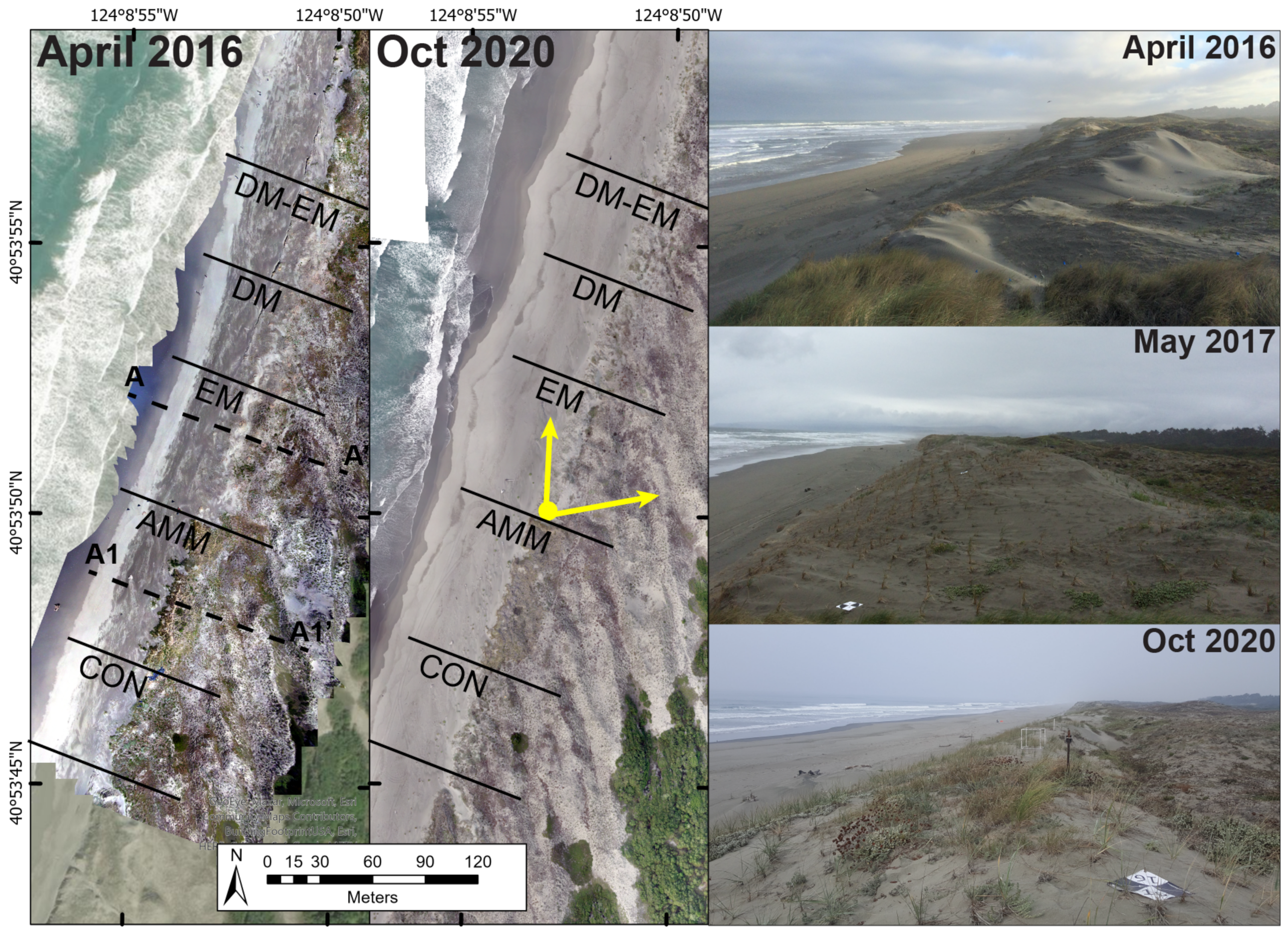
2.2. Lanphere Dunes
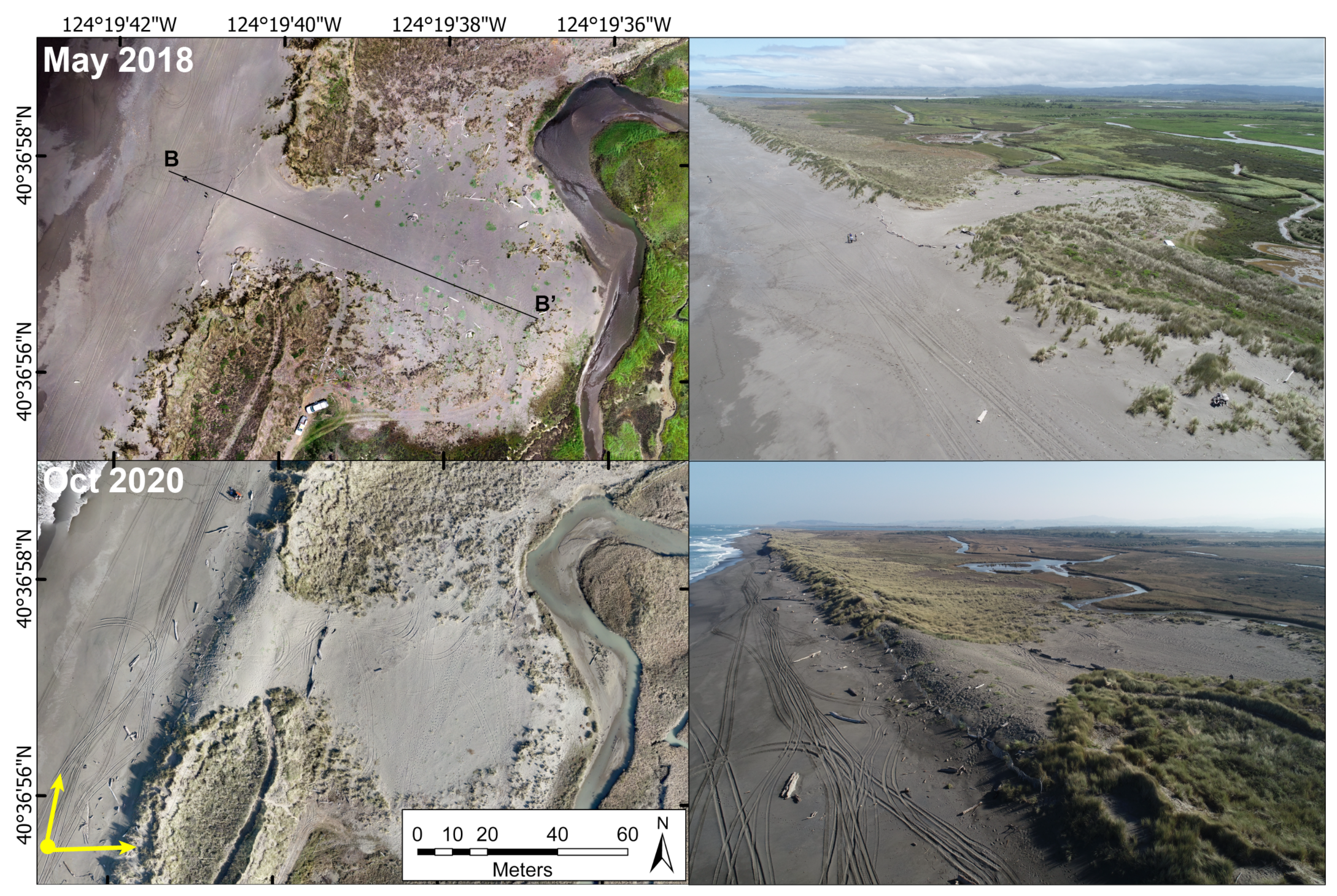
2.3. Eel River Estuarine Preserve Dunes
3. Materials and Methods
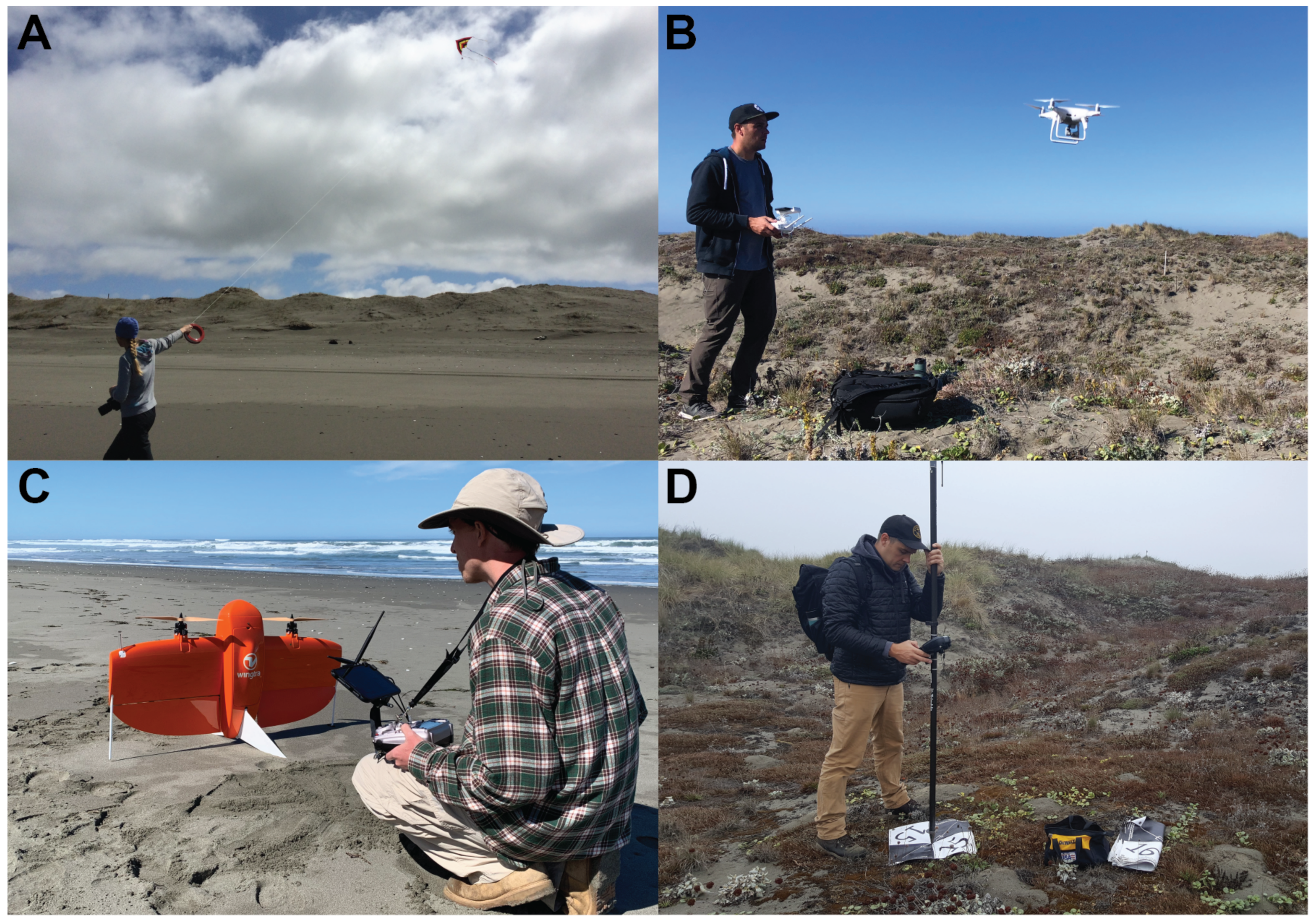
3.1. KAP and UAS Campaign Specifications
3.2. Post-Processing and Intercampaign Alignment
3.3. Budgeting for Uncertainty
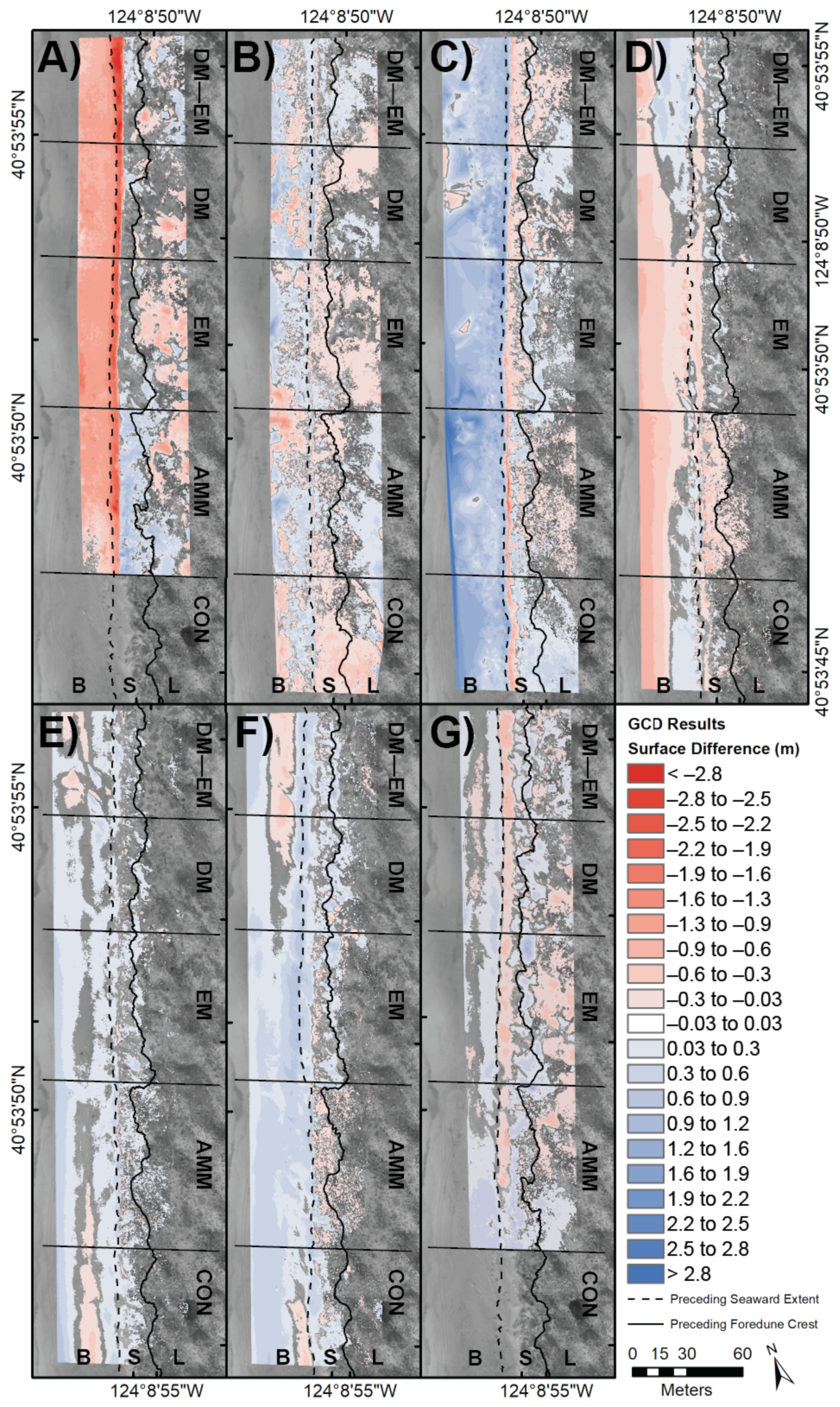
3.4. Geomorphic Change Detection
3.5. Quantifying Vegetation
4. Results
4.1. Uncertainty Assessments for KAP and UAS Datasets
4.2. Differences between Platforms
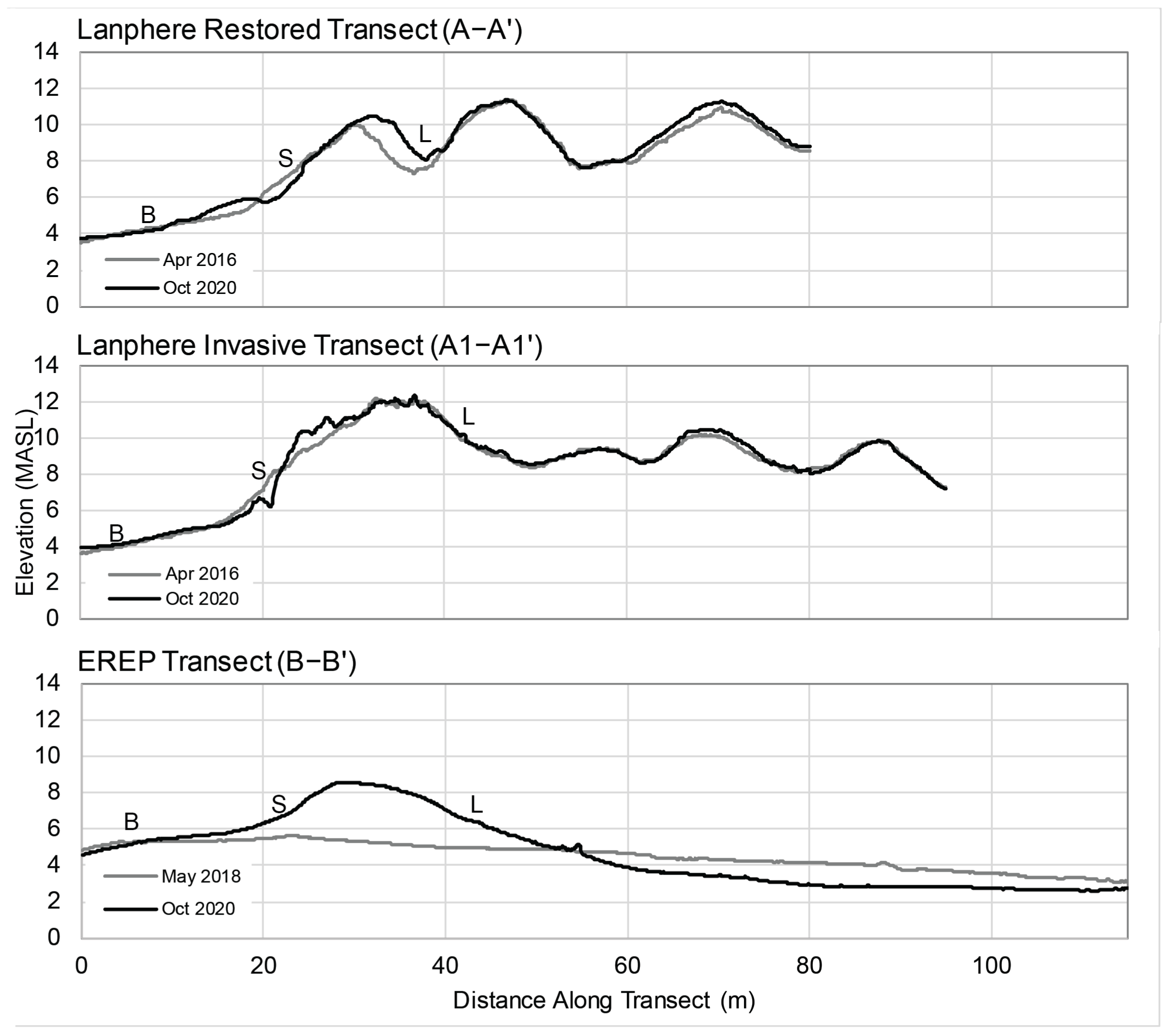
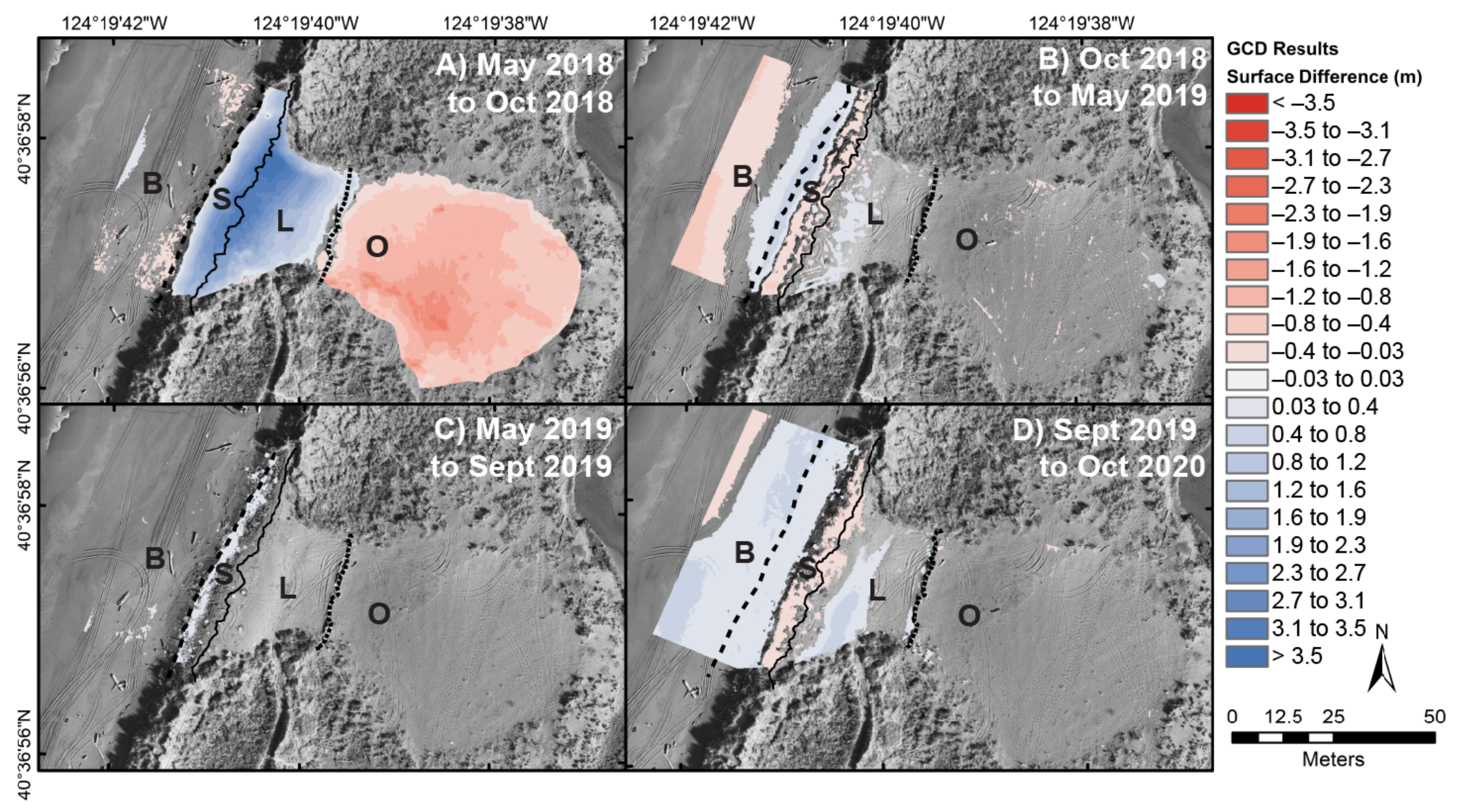
4.3. Geomorphic Change Detection
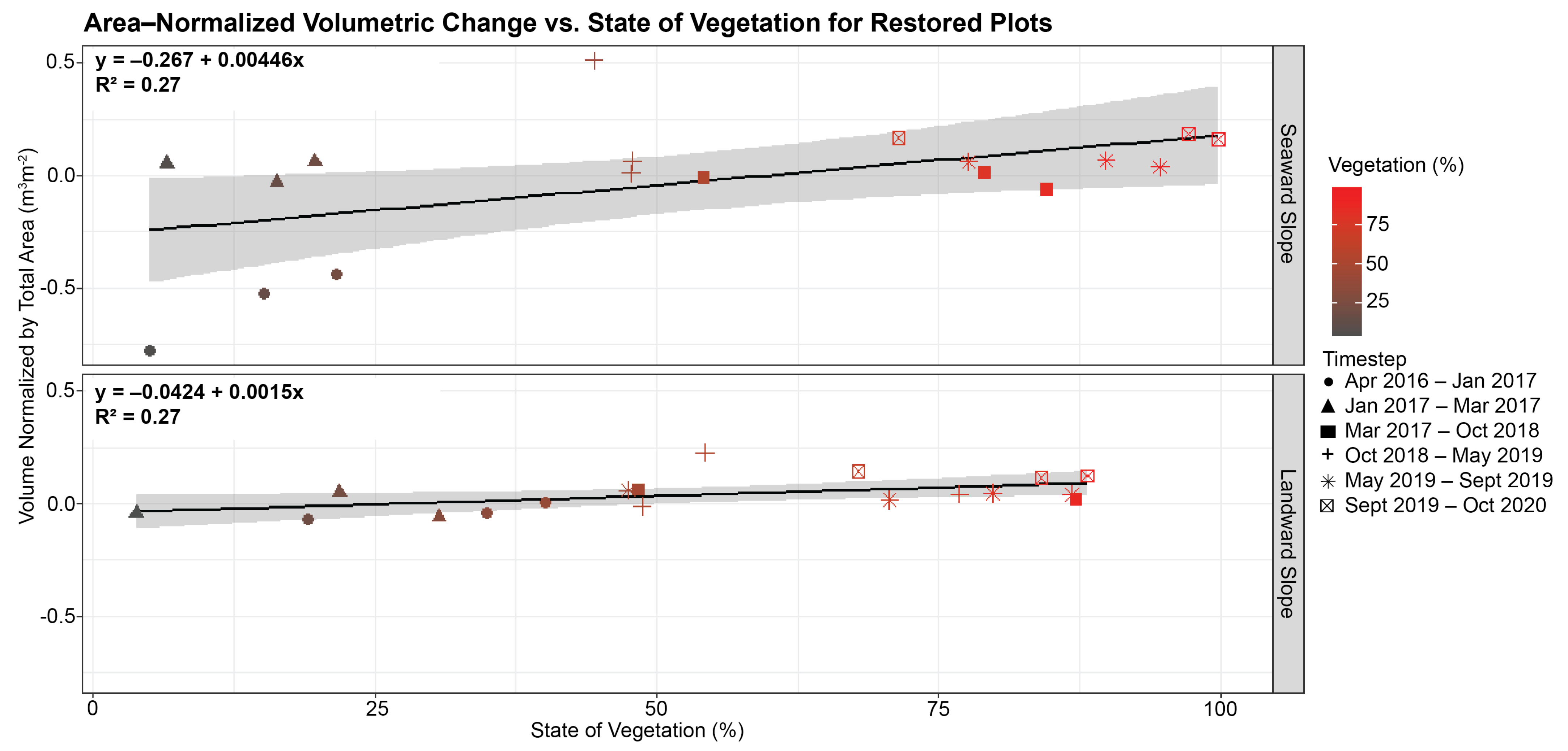
4.4. Vegetation and Geomorphic Change
4.4.1. Changes in Vegetation Coverage
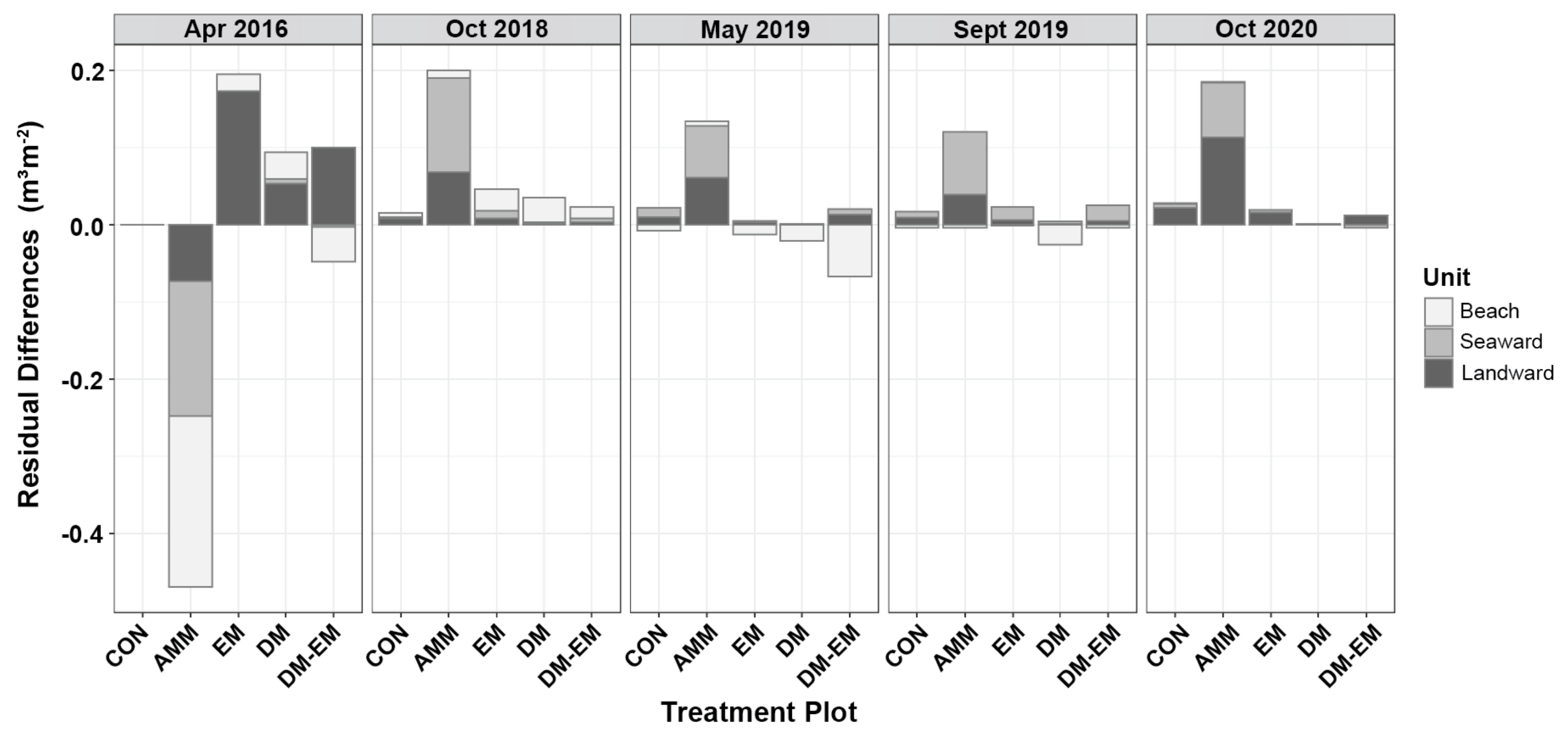
4.4.2. Geomorphic Change Within Vegetation Plots
5. Discussion
5.1. Cross-Platform Comparison
5.1.1. Variability Between KAP and TLS Methods
5.1.2. Variability Between UAS and TLS Methods
5.2. UAS for Assessing Geomorphic Change in Restored Coastal Dune Landscapes
5.3. Uncertainty Budget Calculation
6. Conclusions
- Geomorphic change detection, coupled with SfM datasets, is a valuable tool for geomorphologists and land managers to characterize statistically significant changes in geomorphic systems and, as we have shown, restored systems. However, when using conventional SfM it is necessary to consider the impacts that vegetation, moisture, and topographic complexity may have on reconstruction accuracy and point confidence. Failure to consider these factors may result in the exaggeration of differences between intervals and/or platforms.
- When compared to TLS datasets with better constraints on vegetation removal, the aerial datasets performed well, but struggled in areas of denser vegetation. Even after efforts to remove vegetation from the constructed dense point cloud, artifacts were still apparent when comparing concurrently collected surfaces. The UAS data struggled to accurately capture true geomorphic change in areas of dense vegetation, but deviations from the TLS datasets were typically on the order of 15% of the total area and 0.01–0.02 m of area-normalized volumetric difference (m3m−2).
- Uncertainty budgets for aerial datasets require careful consideration of the possible avenues for introducing error. This is further complicated by a lack of standardization or suggested best practices for constructing an uncertainty budget. We viewed inputs in terms of collection and processing uncertainty and our budgets reflected the sum of those inputs. However, the variety of uncertainty budgets for geomorphic change across published research highlights a need for more standard practices.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AMM | Ammophila arenaria |
| CON | Native control plot |
| DEM | Digital elevation model |
| DM | Dune mat herbaceous alliance |
| DSM | Digital surface model |
| ELC | Eureka littoral cell |
| EM | Elymus mollis |
| EREP | Eel River Estuary Preserve |
| GCD | Geomorphic change detection |
| GCP | Ground control points |
| GSD | Ground sampling distance |
| KAP | Kite aerial photogrammetry |
| NDVI | Normalized difference vegetation index |
| OPUS | Online positioning user service |
| PPK | Post-processing kinematic |
| SfM | Structure from motion |
| TLS | Terrestrial laser scanner |
| UAS | Uncrewed aerial system |
References
- Westoby, M.J.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Fonstad, M.; Dietrich, J.; Courville, B.; Jensen, J.; Carbonneau, P. Topographic structure from motion: a new development in photogrammetric measurement. Earth Surf. Proc. Land. 2013, 38, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.W.; Carrivick, J.; Quincey, D. Structure from motion photogrammetry in physical geography. Prog. Phys. Geog. 2016, 40, 247–275. [Google Scholar] [CrossRef] [Green Version]
- Singh, K.K.; Frazier, A.E. A meta-analysis and review of unmanned aircraft system (UAS) imagery for terrestrial applications. Int. J. Remote Sens. 2018, 39, 5078–5098. [Google Scholar] [CrossRef]
- Anderson, K.; Westoby, M.; James, M. Low-budget topographic surveying comes of age: Structure from motion photogrammetry in geography and the geosciences. Prog. Phys. Geogr. 2019, 43, 163–173. [Google Scholar] [CrossRef]
- Fonstad, M.; Zettler-Mann, A. The camera and the geomorphologist. Geomorphology 2020, 366, 107181. [Google Scholar] [CrossRef]
- Delgado-Fernandez, I.; Davidson-Arnott, R.; Ollerhead, J. Application of a Remote Sensing Technique to the Study of Coastal Dunes. J. Coast. Res. 2009, 2009, 1160–1167. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for coastal surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Sturdivant, E.; Lentz, E.; Thieler, E.R.; Farris, A.; Weber, K.; Remsen, D.; Miner, S.; Henderson, R. UAS-SfM for Coastal Research: Geomorphic Feature Extraction and Land Cover Classification from High-Resolution Elevation and Optical Imagery. Remote Sens. 2017, 9, 1020. [Google Scholar] [CrossRef] [Green Version]
- Hodgson, M.E.; Morgan, G.R. Modeling Sensitivity of Topographic Change with sUAS Imagery. Geomorphology 2020, 8, 107563. [Google Scholar] [CrossRef]
- Luijendijk, A.; Hagenaars, G.; Ranasinghe, R.; Baart, F.; Donchyts, G.; Aarninkhof, S. The State of the World’s Beaches. Sci. Rep. 2018, 8, 6641. [Google Scholar] [CrossRef] [PubMed]
- Luijendijk, A.; de Vries, S. Global beach database. In Sandy Beach Morphodynamics; Elsevier: Amsterdam, The Netherlands, 2020; Chapter 26; pp. 641–658. [Google Scholar] [CrossRef]
- National Academies of Sciences Engineering and Medicine. A Vision for NSF Earth Sciences 2020–2030; National Academies Press: Washington, DC, USA, 2020. [Google Scholar]
- Nordstrom, K.F. Beaches and dunes of human-altered coasts. Prog. Phys. Geog. 1994, 18, 497–516. [Google Scholar] [CrossRef]
- Gangaiya, P.; Beardsmore, A.; Miskiewicz, T. Morphological changes following vegetation removal and foredune re-profiling at Woonona Beach, New South Wales, Australia. Ocean Coast. Manag. 2017, 146, 15–25. [Google Scholar] [CrossRef]
- Ketchum, B.H. The Water’s Edge: Critical Problems of the Coastal Zone; MIT Press: Cambridge, MA, USA, 1972. [Google Scholar]
- Martínez, M.L.; Hesp, P.A.; Gallego-Fernández, J.B. Coastal Dunes: Human Impact and Need for Restoration. In Restoration of Coastal Dunes; Martinez, M.L., Gallego-Fernandez, J.B., Hesp, P.A., Eds.; Springer: Berlin, Germany, 2013; Chapter 1; pp. 1–14. [Google Scholar] [CrossRef]
- Everard, M.; Jones, L.; Watts, B. Have we neglected the societal importance of sand dunes? An ecosystem services perspective. Aquat. Conserv. 2010, 20, 476–487. [Google Scholar] [CrossRef]
- Hesp, P.A. Foredunes and blowouts: Initiation, geomorphology and dynamics. Geomorphology 2002, 48, 245–268. [Google Scholar] [CrossRef]
- Walker, I.J.; Davidson-Arnott, R.G.D.; Bauer, B.O.; Hesp, P.A.; Delgado-Fernandez, I.; Ollerhead, J.; Smyth, T.A.G. Scale-dependent perspectives on the geomorphology and evolution of beach-dune systems. Earth Sci. Rev. 2017, 171, 220–253. [Google Scholar] [CrossRef]
- Hesp, P.A.; Walker, I.J. 11.17 Coastal Dunes. In Treatise on Geomorphology; Shroder, J.F., Ed.; Elsevier: Amsterdam, The Netherlands, 2013; Volume 11, Chapter 11.17; pp. 328–355. [Google Scholar]
- Martínez, M.L.; Gallego-Fernández, J.B.; Hesp, P.A. (Eds.) Restoration of Coastal Dunes; Springer Series on Environmental Management; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Ollerhead, J.; Davidson-Arnott, R.G.D.; Walker, I.J.; Mathew, S. Annual to decadal morphodynamics of the foredune system at Greenwich Dunes, Prince Edward Island, Canada. Earth Surf. Process. Landforms 2013, 38, 284–298. [Google Scholar] [CrossRef]
- Pickart, A.; Sawyer, J. Ecology and Restoration of Northern California Coastal Dunes; California Native Plant Society: Sacramento, CA, USA, 1998. [Google Scholar]
- Barnard, P.; Short, A.; Harley, M.; Splinter, K.; Vitousek, S.; Turner, I.; Allan, J.; Banno, M.; Bryan, K.; Doria, A.; et al. Coastal vulnerability across the Pacific dominated by El Niño/Southern Oscillation. Nat. Geosci. 2015, 8, 801–807. [Google Scholar] [CrossRef]
- Rader, A.M.; Pickart, A.J.; Walker, I.J.; Hesp, P.A.; Bauer, B.O. Foredune morphodynamics and sediment budgets at seasonal to decadal scales: Humboldt Bay National Wildlife Refuge, California, USA. Geomorphology 2018, 318, 69–87. [Google Scholar] [CrossRef]
- Pickart, A.J.; Hesp, P.A. Spatio-temporal geomorphological and ecological evolution of a transgressive dunefield system, Northern California, USA. Glob. Planet. Chang. 2019, 172, 88–103. [Google Scholar] [CrossRef]
- Walker, I.J.; Hesp, P.A. 11.7 Fundamentals of Aeolian Sediment Transport: Airflow Over Dunes. In Treatise on Geomorphology; Shroder, J.F., Ed.; Elsevier: Amsterdam, The Netherlands, 2013; Volume 11, Chapter 11.7; pp. 109–133. [Google Scholar]
- Yager, E.M.; Schmeeckle, M.W. The influence of vegetation on turbulence and bed load transport. J. Geophys. Res. Earth Surf. 2013, 118, 1585–1601. [Google Scholar] [CrossRef]
- James, M.R.; Chandler, J.H.; Eltner, A.; Fraser, C.; Miller, P.E.; Mills, J.P.; Noble, T.; Robson, S.; Lane, S.N. Guidelines on the use of structure-from-motion photogrammetry in geomorphic research. Earth Surf. Process. Landforms 2019, 44, 2081–2084. [Google Scholar] [CrossRef]
- Guisado-Pintado, E.; Jackson, D.W.T.; Rogers, D. 3D mapping efficacy of a drone and terrestrial laser scanner over a temperate beach-dune zone. Geomorphology 2019, 328, 157–172. [Google Scholar] [CrossRef]
- Duffy, J.; Shutler, J.; Witt, M.; DeBell, L.; Anderson, K. Tracking Fine-Scale Structural Changes in Coastal Dune Morphology Using Kite Aerial Photography and Uncertainty-Assessed Structure-from-Motion Photogrammetry. Remote Sens. 2018, 10, 1494. [Google Scholar] [CrossRef] [Green Version]
- Madurapperuma, B.; Close, P.; Fleming, S.; Collin, M.; Thuresson, K.; Lamping, J.; Dellysse, J.; Cortenbach, J. Habitat Mapping of Ma-le’l Dunes Coupling with UAV and NAIP Imagery. Proceedings 2018, 2, 368. [Google Scholar] [CrossRef] [Green Version]
- Madurapperuma, B.; Lamping, J.; McDermott, M.; Murphy, B.; McFarland, J.; Deyoung, K.; Smith, C.; MacAdam, S.; Monroe, S.; Corro, L.; et al. Factors Influencing Movement of the Manila Dunes and Its Impact on Establishing Non-Native Species. Remote Sens. 2020, 12, 1536. [Google Scholar] [CrossRef]
- Van Puijenbroek, M.E.B.; Nolet, C.; de Groot, A.V.; Suomalainen, J.M.; Riksen, M.J.P.M.; Berendse, F.; Limpens, J. Exploring the contributions of vegetation and dune size to early dune development using unmanned aerial vehicle (UAV) imaging. Biogeosciences 2017, 14, 5533–5549. [Google Scholar] [CrossRef] [Green Version]
- Nolet, C.; van Puijenbroek, M.E.B.; Suomalainen, J.M.; Limpens, J.; Riksen, M.J.P.M. UAV-imaging to model growth response of marram grass to sand burial: Implications for coastal dune development. Aeolian Res. 2018, 31, 50–61. [Google Scholar] [CrossRef]
- Eamer, J.; Walker, I. Quantifying spatial and temporal trends in beach-dune volumetric changes using spatial statistics. Geomorphology 2013, 191, 94–108. [Google Scholar] [CrossRef]
- Walker, I.J.; Eamer, J.B.R.; Darke, I.B. Assessing significant geomorphic changes and effectiveness of dynamic restoration in a coastal dune ecosystem. Geomorphology 2013, 199, 192–204. [Google Scholar] [CrossRef]
- Darke, I.; Eamer, J.; Beaugrand, H.; Walker, I. Monitoring considerations for a dynamic dune restoration project: Pacific Rim National Park Reserve, British Columbia, Canada. Earth Surf. Proc. Land. 2013, 38, 983–993. [Google Scholar] [CrossRef]
- Scarelli, F.M.; Sistilli, F.; Fabbri, S.; Cantelli, L.; Barboza, E.G.; Gabbianelli, G. Seasonal dune and beach monitoring using photogrammetry from UAV surveys to apply in the ICZM on the Ravenna coast (Emilia-Romagna, Italy). Remote Sens. Appl. Soc. Environ. 2017, 7, 27–39. [Google Scholar] [CrossRef]
- Ruessink, B.G.; Arens, S.M.; Kuipers, M.; Donker, J.J.A. Coastal dune dynamics in response to excavated foredune notches. Aeolian Res. 2018, 31, 3–17. [Google Scholar] [CrossRef]
- Costas, S.; de Sousa, L.B.; Kombiadou, K.; Ferreira, Ó.; Plomaritis, T.A. Exploring foredune growth capacity in a coarse sandy beach. Geomorphology 2020, 371, 107435. [Google Scholar] [CrossRef]
- Riverscapes Consortium. Geomorphic Change Detection 7. 2020. Available online: http://gcd.riverscapes.xyz/ (accessed on 18 June 2020).
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Proc. Land. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Merz, J.; Pasternack, G.B.; Sear, D.A.; Vericat, D. Linking geomorphic changes to salmonid habitat at a scale relevant to fish. River Res. Appl. 2010, 26, 469–486. [Google Scholar] [CrossRef]
- Patsch, K.; Griggs, G.B. Development of Sand Budgets for California’s Major Littoral Cells. Calif. Coast. Rec. Proj. 2007, 1–115. [Google Scholar] [CrossRef]
- Patton, J.R.; Williams, T.B.; Anderson, J.K.; Leroy, T.H. Tectonic Land Level Changes and Their Contribution to Sea-Level Rise, Humboldt Bay Region, Northern California; Technical Report; Cascadia Geosciences: Arcata, CA, USA, 2017. [Google Scholar]
- Burgette, R.J.; Weldon, R.J.; Schmidt, D.A. Interseismic uplift rates for western Oregon and along-strike variation in locking on the Cascadia subduction zone. J. Geophys. Res. Solid Earth 2009, 114, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Patsch, K.; Griggs, G.B. Littoral Cells, Sand Budgets, and Beaches: Understanding California’s Shoreline. In California Department of Boating and Waterways, California Coastal Sediment Management Workgroup; Institute of Marine Sciences, University of California: Santa Cruz, CA, USA, 2006. [Google Scholar]
- Black, J.; Gress, C.; Byers, J.; Jennings, E.; Ely, C. Behaviour of wintering Tundra Swans Cygnus columbianus columbianus at the Eel River delta and Humboldt Bay, California, USA. Wildfowl 2010, 60, 38–51. [Google Scholar]
- Monroe, G.; Reynolds, F. Natural Resources of the Eel River Delta; Technical Report; California Department of Fish and Game: Sacramento, CA, USA, 1974. [Google Scholar]
- Carslaw, D.C.; Ropkins, K. Openair—An R Package for Air Quality DATA analysis. Environ. Model. Softw. 2012, 27–28, 52–61. [Google Scholar] [CrossRef]
- Carslaw, D.C. The Openair Manual—Open-Source Tools for Analysing Air Pollution Data; Manual for Version 2.6-6. 2019. Available online: https://cran.r-project.org/web/packages/openair/index.html (accessed on 17 December 2020).
- Pickart, A. Dune Restoration Over Two Decades at the Lanphere and Ma-le’l Dunes in Northern California. In Restoration of Coastal Dunes; Martínez, M., Gallego-Fernández, J., Hesp, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 159–171. [Google Scholar]
- Buell, A.; Pickart, A.; Stuart, J. Introduction History and Invasion Patterns of Ammophila arenaria on the North Coast of California. Conserv. Biol. 1995, 9, 1587–1593. [Google Scholar] [CrossRef]
- Tobias, M.M. California foredune plant biogeomorphology. Phys. Geogr. 2015, 36, 19–33. [Google Scholar] [CrossRef]
- Pickart, A. Control of European Beachgrass (Ammophila arenaria) on the West Coast of the United States; California Exotic Pest Council: Berkeley, CA, USA, 1997; pp. 1–8. [Google Scholar]
- Costa, S.; Glatzel, K. Humboldt Bay, California, Entrance Channel. Report 1: Data Review; Technical Report; Coastal and Hydraulics Lab, U.S. Army Engineer Research and Development Center: Vicksburg, MS, USA, 2002. [Google Scholar]
- Hapke, C.J.; Reid, D.; Richmond, B.M.; Ruggiero, P.; List, J. National assessment of shoreline change: Part 3: Historical shoreline changes and associated coastal land loss along the sandy shorelines of the California coast. US Geol. Surv. Open File Rep. 2006, 1219, 79. [Google Scholar]
- Sallenger, A., Jr. Storm impact scale for barrier islands. J. Coast. Res. 2000, 16, 890–895. [Google Scholar]
- Houser, C.; Hapke, C.; Hamilton, S. Controls on coastal dune morphology, shoreline erosion and barrier island response to extreme storms. Geomorphology 2008, 100, 223–240. [Google Scholar] [CrossRef]
- Mathew, S.; Davidson-Arnott, R.; Ollerhead, J. Evolution of a beach–dune system following a catastrophic storm overwash event: Greenwich Dunes, Prince Edward Island, 1936–2005. Can. J. Earth Sci. 2010, 47, 273–290. [Google Scholar] [CrossRef]
- The Wildlands Conservancy. Eel River Estuary Preserve (EREP) Management Plans; Technical Report; The Wildlands Conservancy: Oak Glen, CA, USA, 2017. [Google Scholar]
- James, M.; Antoniazza, G.; Robson, S.; Lane, S. Mitigating systematic error in topographic models for geomorphic change detection: Accuracy, precision and considerations beyond off-nadir imagery. Earth Surf. Proc. Land. 2020, 45, 2251–2271. [Google Scholar] [CrossRef]
- Mosbrucker, A.R.; Major, J.J.; Spicer, K.R.; Pitlick, J. Camera system considerations for geomorphic applications of SfM photogrammetry. Earth Surf. Process. Landforms 2017, 42, 969–986. [Google Scholar] [CrossRef] [Green Version]
- Agisoft, L.L.C. Agisoft Metashape User Manual: Professional Edition; St. Petersburg, Russia, 2019. [Google Scholar]
- Bayley, D.T.I.; Mogg, A.O.M. A protocol for the large-scale analysis of reefs using Structure from Motion photogrammetry. Methods Ecol. Evol. 2020, 11. [Google Scholar] [CrossRef]
- Wernette, P.A.; Lehner, J.; Houser, C. What is ‘real’? Identifying erosion and deposition in context of spatially-variable uncertainty. Geomorphology 2020, 355, 107083. [Google Scholar] [CrossRef]
- Hon, G. Error: the long neglect, the one-sided view, and a typology. In Going Amiss in Experimental Research; Springer: Berlin, Germany, 2009; pp. 11–26. [Google Scholar]
- Sherman, D.J. Understanding wind-blown sand: Six vexations. Geomorphology 2020, 366. [Google Scholar] [CrossRef]
- Brasington, J.; Rumsby, B.T.; Mcvey, R.A. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Proc. Land. 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Lane, S.N.; Westaway, R.M.; Hicks, M. Estimation of erosion and deposition volumes in a large, gravel-bed, braided river using synoptic remote sensing. Earth Surf. Proc. Land. 2003, 28, 249–271. [Google Scholar] [CrossRef]
- Rader, A. Foredune Morphodynamics and Seasonal Sediment Budget Patterns: Humboldt Bay National Wildlife Refuge, Northern California, USA. Master’s Thesis, University of Victoria, Victoria, BC, Canada, 2017. [Google Scholar]
- Chiba, T.; Kaneta, S.; Suzuki, Y. Red relief image map: New visualization method for three dimensional data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1071–1076. [Google Scholar]
- Smith, A.; Houser, C.; Lehner, J.; George, E.; Lunardi, B. Crowd-sourced identification of the beach-dune interface. Geomorphology 2020, 367, 107321. [Google Scholar] [CrossRef]
- Wickham, H. ggplot2: Elegant Graphics for Data Analysis; Springer: New York, NY, USA, 2016. [Google Scholar]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Proc. Land. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Proc. Land. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Meyer, F.; Perrier, V.; Carroll, I.; Dang, X. Esquisse: Explore and Visualize Your Data Interactively. Available online: https://cran.r-project.org/package=esquisse (accessed on 17 December 2020).
- Rotnicka, J.; Dłużewski, M.; Da̧bski, M.; Rodzewicz, M.; Włodarski, W.; Zmarz, A. Accuracy of the UAV-Based DEM of Beach–Foredune Topography in Relation to Selected Morphometric Variables, Land Cover, and Multitemporal Sediment Budget. Estuaries Coasts 2020, 43, 1939–1955. [Google Scholar] [CrossRef]
- GHD. Coastal Dune Vulnerability and Adaptation Study: Eel River Shoreline Trends; GHD: Eureka, CA, USA, 2018. [Google Scholar]
- Smith, M.W.; Vericat, D. From experimental plots to experimental landscapes: Topography, erosion and deposition in sub-humid badlands from Structure-from-Motion photogrammetry. Earth Surf. Process. Landforms 2015, 40, 1656–1671. [Google Scholar] [CrossRef] [Green Version]
- Bangen, S.G.; Hensleigh, J.; McHugh, P.; Wheaton, J.M. Error modeling of DEMs from topographic surveys of rivers using fuzzy inference systems. Water Resour. Res. 2016, 52, 1176–1193. [Google Scholar] [CrossRef] [Green Version]
- Anderson, S. Uncertainty in quantitative analyses of topographic change: error propagation and the role of thresholding. Earth Surf. Proc. Land. 2019, 44, 1015–1033. [Google Scholar] [CrossRef]
- Griffiths, D.; Burningham, H. Comparison of pre- and self-calibrated camera calibration models for UAS-derived nadir imagery for a SfM application. Prog. Phys. Geog. 2019, 43, 215–235. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Collection Date (M/D/Y) | Platform | Model | Camera | Alt. (m) | GSD (cm/pix) | Images Used | Geocorrection Method | Avg. Wind (m/s) | Total Uncertainty (m) | |
|---|---|---|---|---|---|---|---|---|---|---|
| Lanphere | 4/30/2016 * | Kite | N/A | GoPro Hero4 12MP/4K) | 32.1 | 1.79 | 1804 | GCPs (n = 10) | 3.8 | 0.072 |
| 7/5/2016 | 76.9 | 8.06 | 926 | 5.8 | ||||||
| 9/28/2016 * | 44.1 | 2.59 | 3313 | 6.4 | ||||||
| 1/6/2017 | 24.9 | 2.75 | 1028 | 5.6 | 0.021 | |||||
| 3/22/2017 | 43.9 | 4.3 | 1082 | 6.0 | 0.021 | |||||
| 10/3/2017 * | 41.2 | 2.05 | 1215 | 9.3 | ||||||
| 10/6/2018 * | Quadcopter | DJI P4P | 20 MP | 68.7 | 1.73 | 545 | GCPs (n = 14) | 3.2 | 0.029 | |
| 5/19/2019 * | Fixed-Wing | WingtraOne | Sony RX1RII (42 MP) | 108 | 1.37 | 1010 | PPK | 5.6 | 0.027 | |
| 9/16/2019 * | 101 | 1.28 | 1394 | ∼1.5 | 0.031 | |||||
| 10/8/2020 * | 97.9 | 1.25 | 1387 | 3.1 | 0.020 | |||||
| EREP | 5/23/2018 | Quadcopter | DJI P4P | 20MP | 65.7 | 1.67 | 266 | GCPs (n = 11) | 2.1 | 0.032 |
| 10/8/2018 | 52.5 | 1.37 | 418 | GCPs (n = 11) | 6.0 | 0.031 | ||||
| 5/20/2019 | Fixed-Wing | WingtraOne | Sony RX1RII (42 MP) | 104 | 1.32 | 526 | GCPs (n = 12) | 4.8 | 0.033 | |
| 9/17/2019 | 108 | 1.37 | 386 | PPK | ∼4.5 | 0.037 | ||||
| 10/9/2020 | 103 | 1.32 | 407 | 2.4 | 0.032 |
| April 2016 (KAP) | October 2018 (UAS) | May 2019 (UAS) | September 2019 (UAS) | October 2020 (UAS) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
|
Vegetation/ Geomorphic Unit | Area (%) |
Residual Difference (m3m−2) | Area (%) |
Residual Difference (m3m−2) | Area (%) |
Residual Difference (m3m−2) | Area (%) |
Residual Difference (m3m−2) | Area (%) |
Residual Difference (m3m−2) |
| CON | 9.7 | 0.004 ± 0.03 | 14.2 | 0.011 ± 0.03 | 11.6 | 0.009 ± 0.03 | 14.0 | 0.009 ± 0.03 | ||
| AMM | 61.7 | −0.149 ± 0.07 | 57.7 | 0.103 ± 0.03 | 51.3 | 0.065 ± 0.03 | 52.5 | 0.064 ± 0.03 | 43.8 | 0.084 ± 0.03 |
| EM | 27.6 | 0.058 ± 0.07 | 8.0 | 0.009 ± 0.04 | 4.9 | 0.002 ± 0.03 | 12.2 | 0.014 ± 0.04 | 5.9 | 0.006 ± 0.03 |
| DM | 23.6 | 0.023 ± 0.07 | 2.1 | 0.001 ± 0.04 | 4.0 | 0.001 ± 0.03 | 3.3 | 0.003 ± 0.04 | 3.5 | 0.000 ± 0.03 |
| DM-EM | 24.8 | 0.026 ± 0.06 | 3.5 | 0.004 ± 0.04 | 9.7 | 0.009 ± 0.03 | 10.9 | 0.016 ± 0.04 | 8.9 | 0.000 ± 0.03 |
| Beach | 35.2 | −0.054 ± 0.06 | 18.9 | 0.017 ± 0.04 | 23.4 | −0.017 ± 0.03 | 8.2 | −0.007 ± 0.04 | 0.3 | 0.000 ± 0.03 |
| Seaward | 31.6 | −0.063 ± 0.06 | 18.4 | 0.031 ± 0.04 | 18.7 | 0.019 ± 0.03 | 21.1 | 0.026 ± 0.04 | 12.9 | 0.016 ± 0.03 |
| Landward | 52.6 | 0.064 ± 0.07 | 18.1 | 0.023 ± 0.03 | 18.4 | 0.022 ± 0.03 | 15.8 | 0.015 ± 0.03 | 26.9 | 0.043 ± 0.03 |
| Seaward (Restored) | 14.6 | 0.001 ± 0.06 | 5.2 | 0.006 ± 0.04 | 5.3 | 0.003 ± 0.03 | 11.3 | 0.014 ± 0.04 | 4.4 | 0.000 ± 0.03 |
| Landward (Restored) | 48.4 | 0.119 ± 0.07 | 4.6 | 0.004 ± 0.03 | 7.2 | 0.005 ± 0.03 | 4.1 | 0.004 ± 0.03 | 11.6 | 0.010 ± 0.03 |
| Volumetric Change Normalized by Total Area (m3m−2) | |||||||
|---|---|---|---|---|---|---|---|
| Vegetation/ Geomorphic Unit | Apr 2016–Jan 2017 | Jan 2017–Mar 2017 | Mar 2017–Oct 2018 | Oct 2018–May 2019 | May 2019–Sept 2019 | Sept 2019–Oct 2020 | Apr 2016–Oct 2020 |
| CON Beach | −0.02 ± 0.02 | 1.14 ± 0.04 | −0.22 ± 0.03 | 0.12 ± 0.03 | 0.27 ± 0.03 | ||
| CON Seaward | −0.15 ± 0.03 | 0.09 ± 0.03 | −0.03 ± 0.03 | 0.07 ± 0.04 | 0.14 ± 0.03 | ||
| CON Landward | −0.21 ± 0.03 | 0.22 ± 0.04 | −0.01 ± 0.04 | 0.01 ± 0.04 | 0.01 ± 0.03 | ||
| AMM Beach | −0.79 ± 0.07 | 0.04 ± 0.02 | 1.17 ± 0.04 | −0.3 ± 0.03 | 0.16 ± 0.04 | 0.34 ± 0.04 | 0.39 ± 0.07 |
| AMM Seaward | −0.09 ± 0.06 | −0.02 ± 0.02 | 0.03 ± 0.03 | −0.16 ± 0.04 | 0.09 ± 0.04 | 0.04 ± 0.03 | 0.18 ± 0.06 |
| AMM Landward | 0.17 ± 0.06 | −0.01 ± 0.02 | 0.03 ± 0.03 | −0.07 ± 0.04 | 0.03 ± 0.04 | 0.00 ± 0.03 | 0.11 ± 0.05 |
| EM Beach | −1.12 ± 0.07 | 0.10 ± 0.02 | 1.06 ± 0.04 | −0.35 ± 0.04 | 0.14 ± 0.04 | 0.36 ± 0.04 | 0.20 ± 0.07 |
| EM Seaward | −0.44 ± 0.06 | −0.03 ± 0.02 | 0.51 ± 0.03 | −0.06 ± 0.03 | 0.07 ± 0.04 | 0.16 ± 0.03 | −0.11 ± 0.06 |
| EM Landward | −0.04 ± 0.05 | −0.06 ± 0.03 | 0.23 ± 0.04 | 0.02 ± 0.03 | 0.05 ± 0.04 | 0.12 ± 0.04 | 0.32 ± 0.07 |
| DM Beach | −0.94 ± 0.07 | 0.13 ± 0.02 | 0.71 ± 0.03 | −0.14 ± 0.03 | 0.12 ± 0.04 | 0.15 ± 0.03 | 0.23 ± 0.07 |
| DM Seaward | −0.52 ± 0.06 | 0.06 ± 0.02 | 0.06 ± 0.03 | −0.01 ± 0.03 | 0.04 ± 0.04 | 0.17 ± 0.04 | −0.12 ± 0.06 |
| DM Landward | 0.00 ± 0.05 | −0.04 ± 0.03 | 0.04 ± 0.03 | 0.06 ± 0.04 | 0.06 ± 0.04 | 0.14 ± 0.03 | 0.28 ± 0.07 |
| DM-EM Beach | −0.90 ± 0.07 | 0.08 ± 0.02 | 0.66 ± 0.04 | 0.08 ± 0.03 | 0.03 ± 0.03 | 0.10 ± 0.03 | 0.15 ± 0.06 |
| DM-EM Seaward | −0.78 ± 0.06 | 0.05 ± 0.02 | 0.01 ± 0.03 | 0.01 ± 0.03 | 0.06 ± 0.04 | 0.18 ± 0.03 | −0.21 ± 0.05 |
| DM-EM Landward | −0.07 ± 0.06 | 0.05 ± 0.03 | −0.01 ± 0.03 | 0.04 ± 0.04 | 0.02 ± 0.04 | 0.12 ± 0.04 | 0.15 ± 0.06 |
| Volumetric Change Normalized by Total Area (m3 m−2) | ||||
|---|---|---|---|---|
|
Geomorphic Unit | Oct 18–May 18 | May 19–Oct 18 | Sept 19–May 19 | Oct 20–Sept 19 |
| Beach | −0.007 ± 0.04 | −0.081 ± 0.03 | 0.004 ± 0.05 | 0.266 ± 0.04 |
| Seaward | 1.500 ± 0.04 | 0.051 ± 0.03 | 0.051 ± 0.05 | 0.119 ± 0.04 |
| Landward | 1.597 ± 0.04 | 0.023 ± 0.04 | 0.003 ± 0.05 | 0.069 ± 0.04 |
| Overwash | −0.822 ± 0.04 | 0.000 ± 0.03 | 0.000 ± 0.04 | 0.000 ± 0.04 |
| Vegetation | Plot | Apr 2016 | Jan 2017 | Mar 2017 | Oct 2017 | Oct 2018 | May 2019 | Sep 2019 | Oct 2020 |
|---|---|---|---|---|---|---|---|---|---|
| EM per m2 | EM | 0 | 0.49 | 0.38 | 0.31 | 0.40 | 1.01 | 0.88 | 0.63 |
| DM | 0 | 0.02 | 0.02 | 0.00 | 0.02 | 0.01 | 0.04 | 0.02 | |
| DM-EM | 0 | 0.07 | 0.09 | 0.05 | 0.19 | 0.44 | 0.34 | 0.28 | |
| DM (% Total Area) | EM | 6.95 | 4.13 | 4.06 | 10.05 | 14.01 | 18.90 | 18.54 | 17.59 |
| DM | 2.06 | 0.31 | 0.11 | 14.50 | 17.61 | 23.57 | 23.49 | 23.14 | |
| DM-EM | 8.53 | 0.43 | 0.49 | 21.64 | 22.95 | 29.90 | 30.24 | 31.44 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hilgendorf, Z.; Marvin, M.C.; Turner, C.M.; Walker, I.J. Assessing Geomorphic Change in Restored Coastal Dune Ecosystems Using a Multi-Platform Aerial Approach. Remote Sens. 2021, 13, 354. https://doi.org/10.3390/rs13030354
Hilgendorf Z, Marvin MC, Turner CM, Walker IJ. Assessing Geomorphic Change in Restored Coastal Dune Ecosystems Using a Multi-Platform Aerial Approach. Remote Sensing. 2021; 13(3):354. https://doi.org/10.3390/rs13030354
Chicago/Turabian StyleHilgendorf, Zach, M. Colin Marvin, Craig M. Turner, and Ian J. Walker. 2021. "Assessing Geomorphic Change in Restored Coastal Dune Ecosystems Using a Multi-Platform Aerial Approach" Remote Sensing 13, no. 3: 354. https://doi.org/10.3390/rs13030354
APA StyleHilgendorf, Z., Marvin, M. C., Turner, C. M., & Walker, I. J. (2021). Assessing Geomorphic Change in Restored Coastal Dune Ecosystems Using a Multi-Platform Aerial Approach. Remote Sensing, 13(3), 354. https://doi.org/10.3390/rs13030354