
Cereal Crops Soil Parameters Retrieval Using L-Band ALOS-2 and C-Band Sentinel-1 Sensors

 , ,
, ,  ,
, 
Abstract
:1. Introduction
2. Study Zone Description and Database
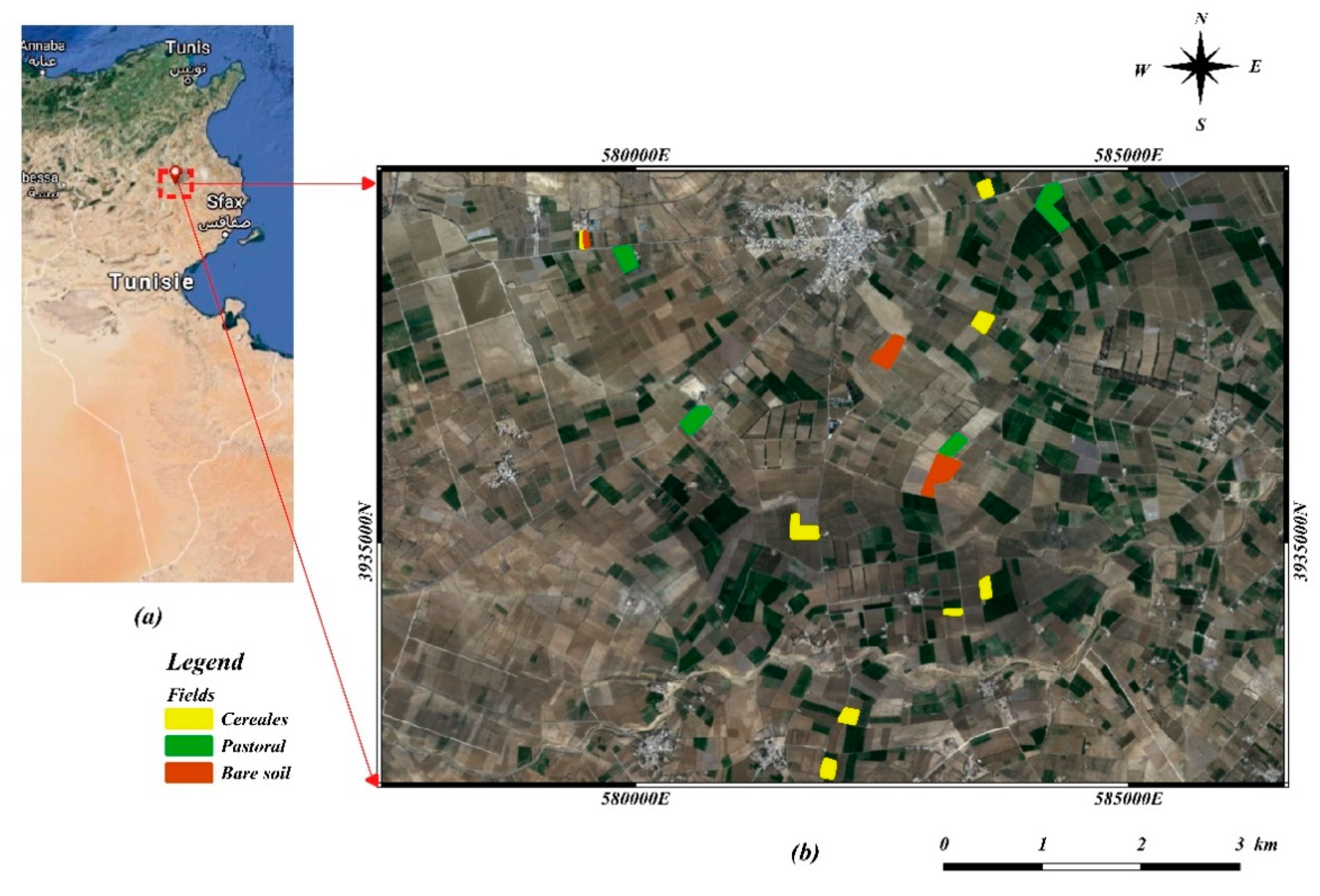
2.1. Study Zone Description
2.2. Dataset Description
2.2.1. Radar Images
- (a)
- ALOS-2 Radar Data
- (b)
- Sentinel-1 Constellation Radar Data
2.2.2. Sentinel-2 Optic Data
2.2.3. In Situ Measurements
- (a)
- Roughness
- (b)
- Soil Moisture (Mv)
- (c)
- Vegetation Parameters
3. Methodology
3.1. Bare Soil Backscattering Models
3.1.1. Empirical Relationships
3.1.2. Dubois Calibrated Model (Dubois-B)
3.1.3. IEM-B Model
3.2. Water Cloud Model (WCM) Backscattering Model over Vegetation Cover
3.3. Statistical Parameters for Accuracy Assessment
4. Results and Discussion
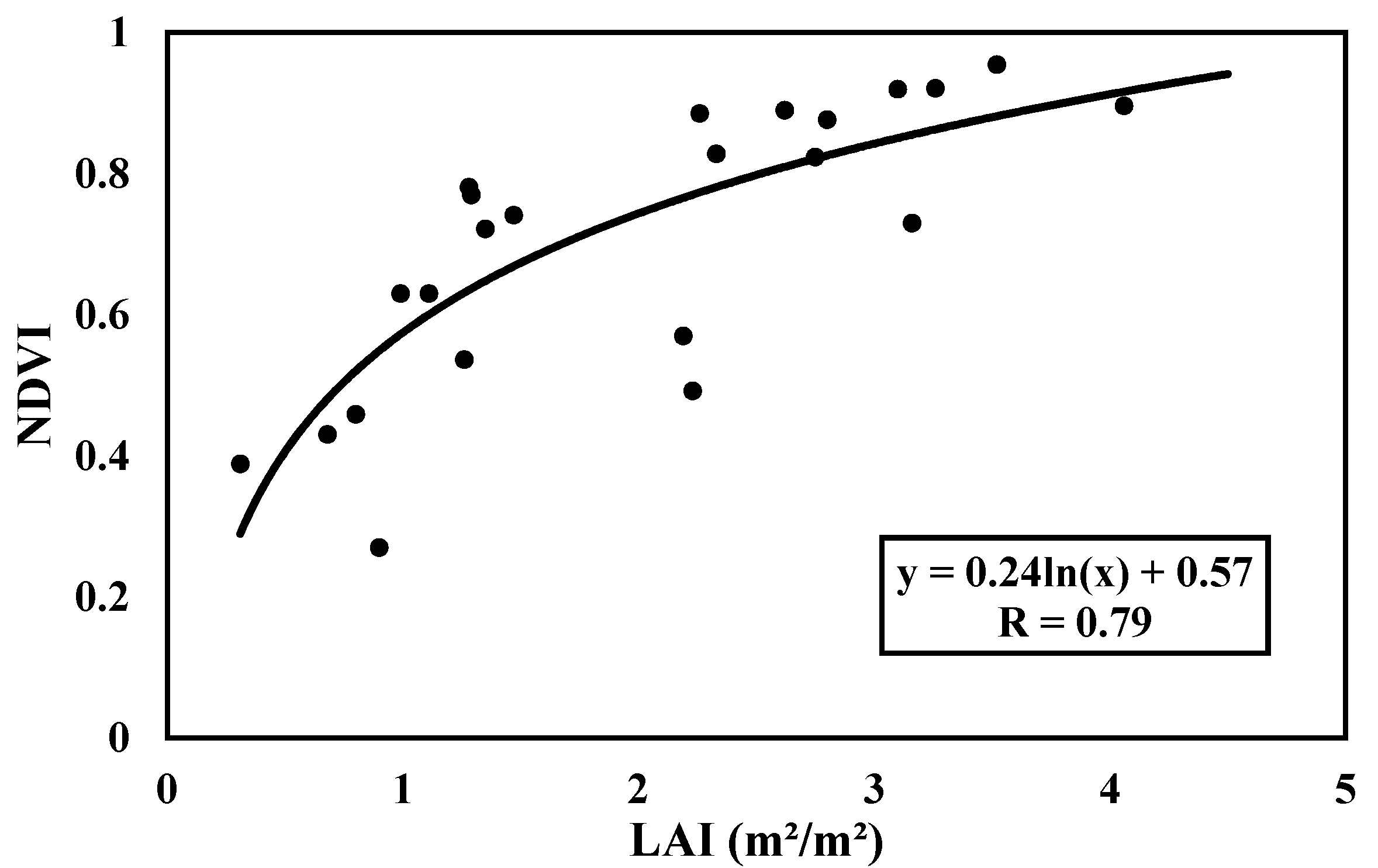
4.1. Relationship between NDVI and Vegetation Parameters
4.2. Sensitivity of Radar Signal to Surface Properties
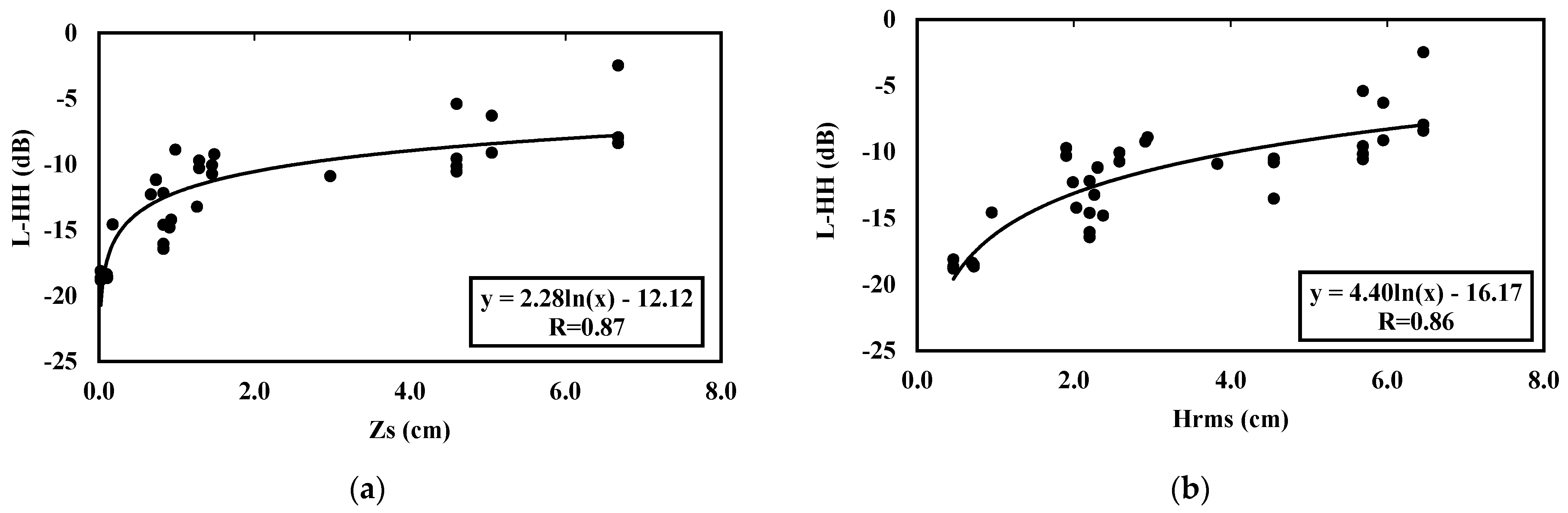
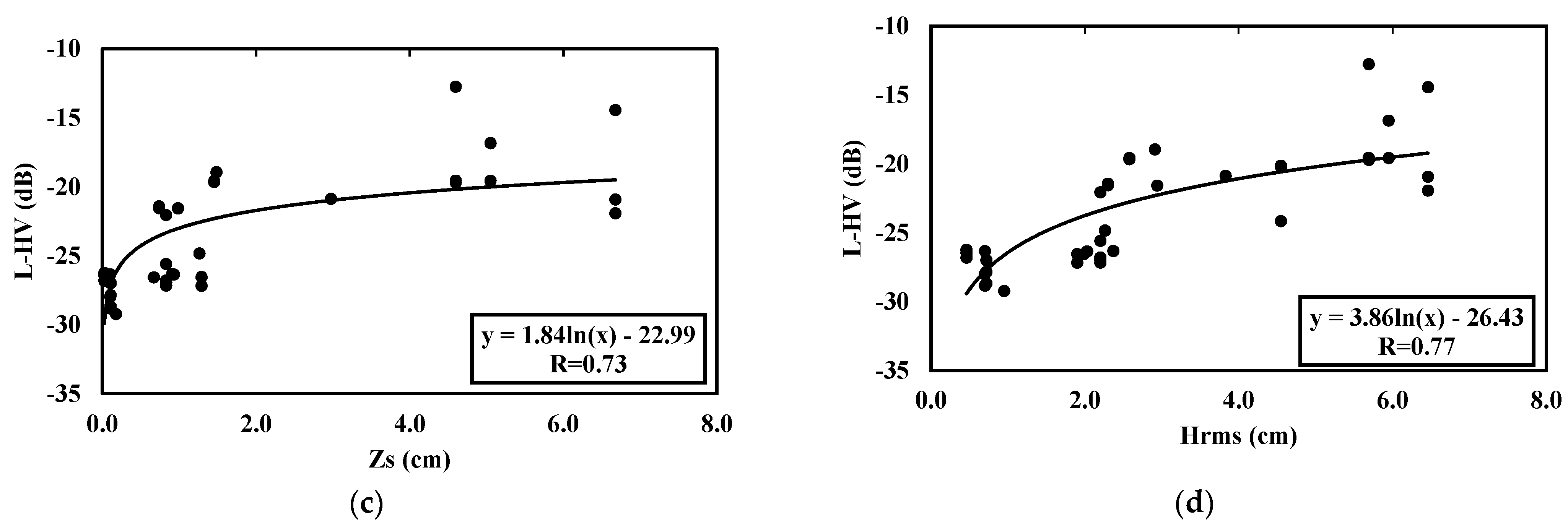
4.2.1. Sensitivity to Soil Roughness
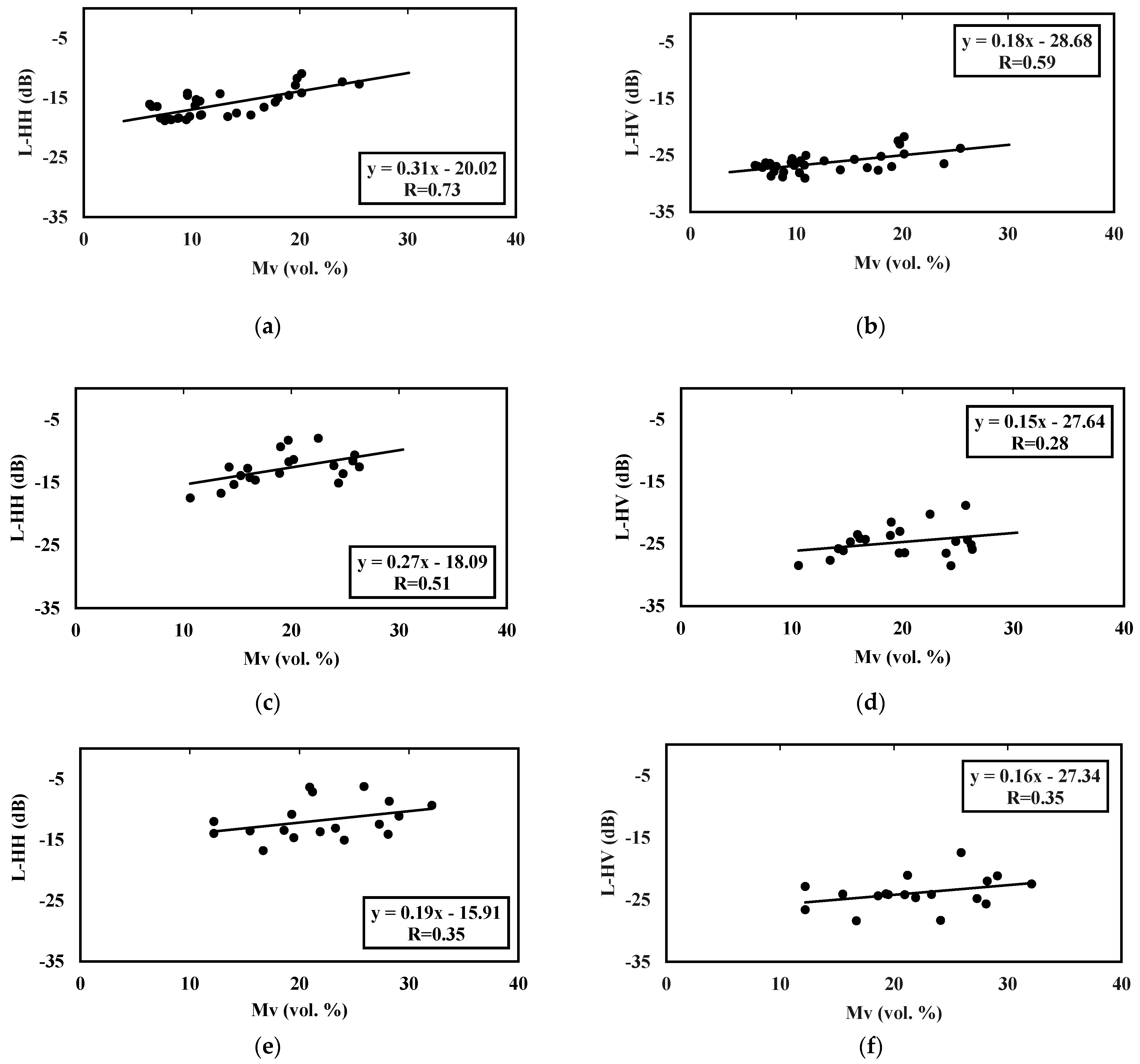
4.2.2. Sensitivity to Soil Moisture
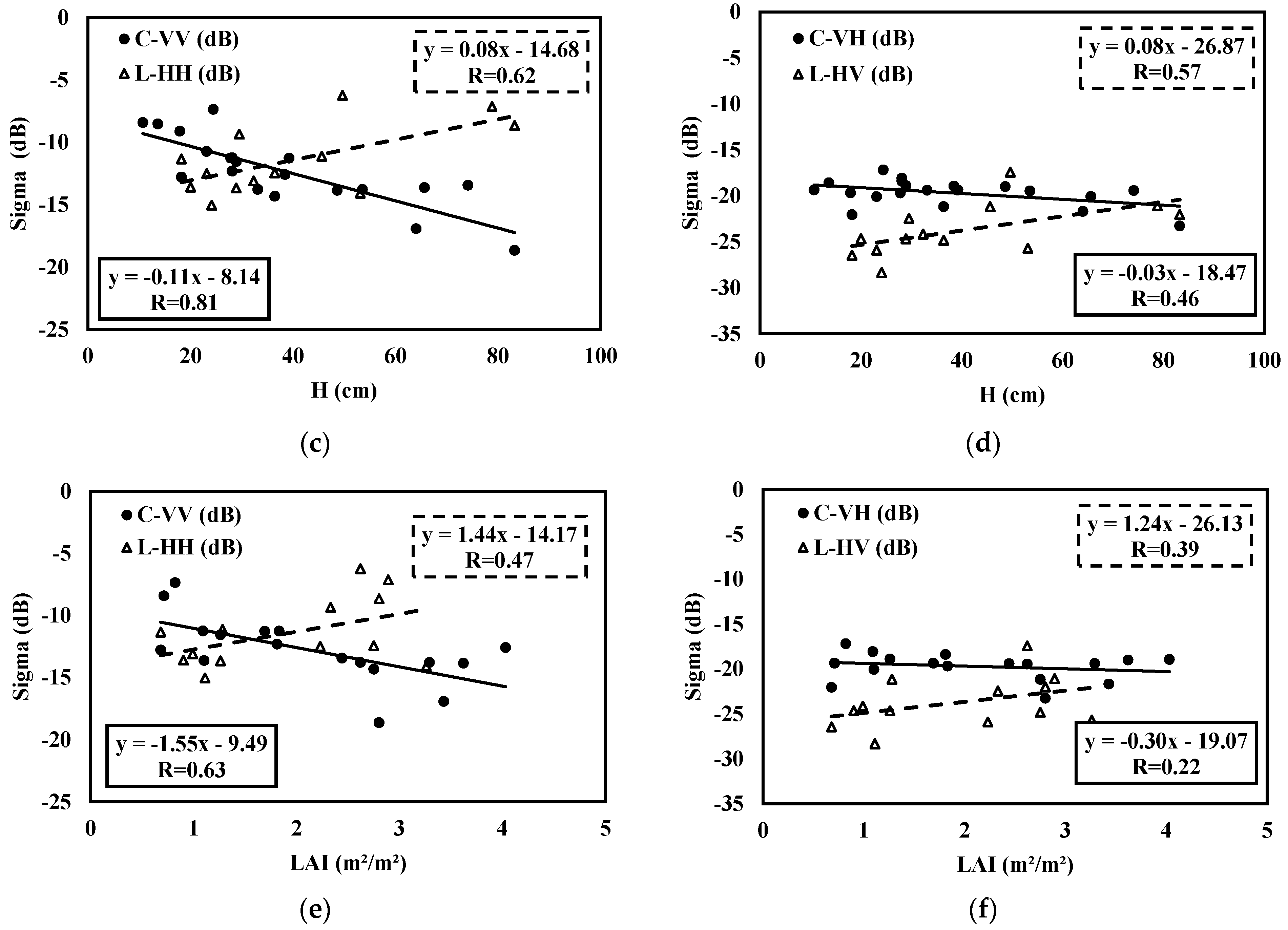
4.2.3. Sensitivity of Radar Signal to Vegetation Parameters
4.3. Simulations of Radar Backscattering Coefficients
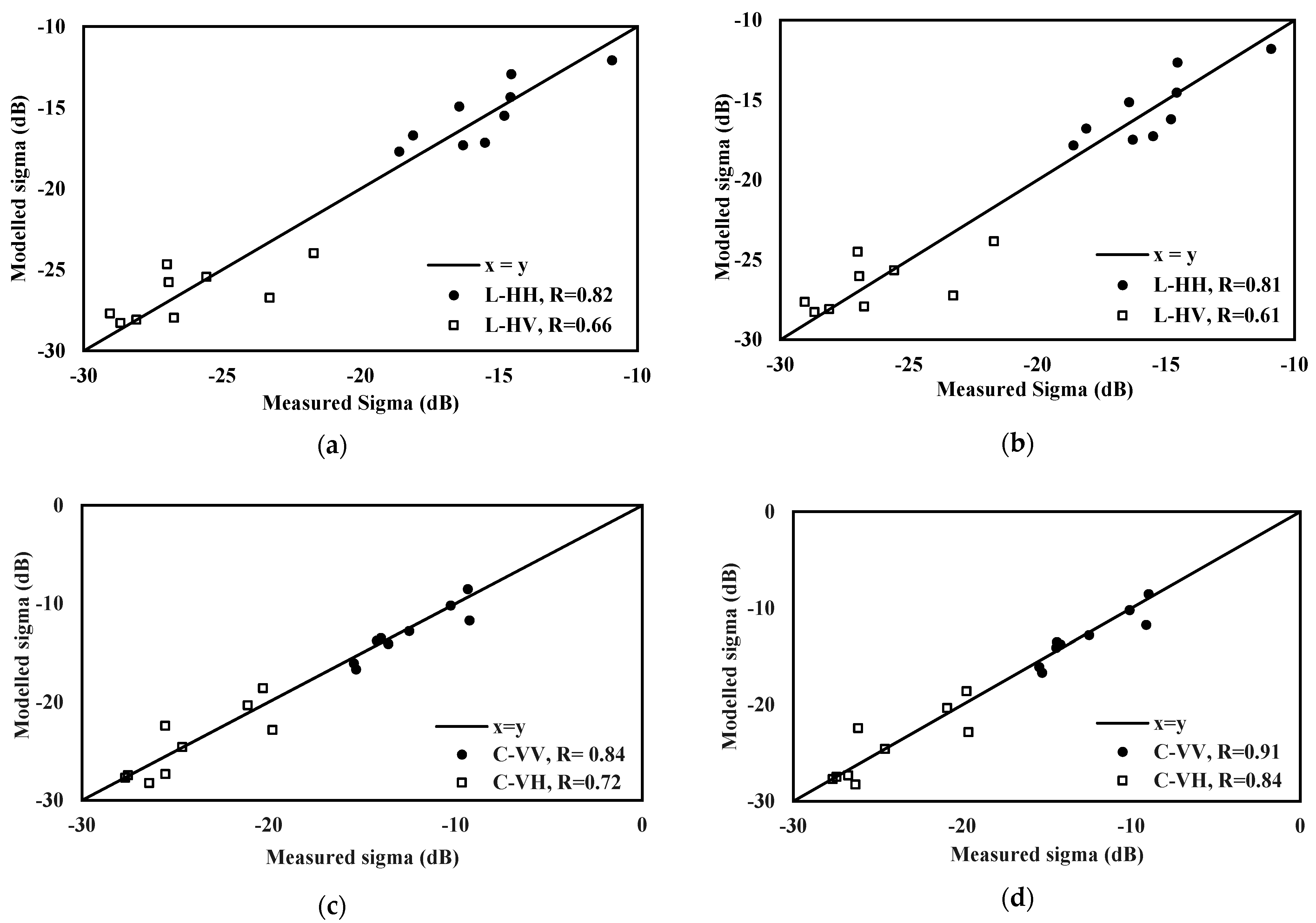
4.3.1. Case of Bare Soils
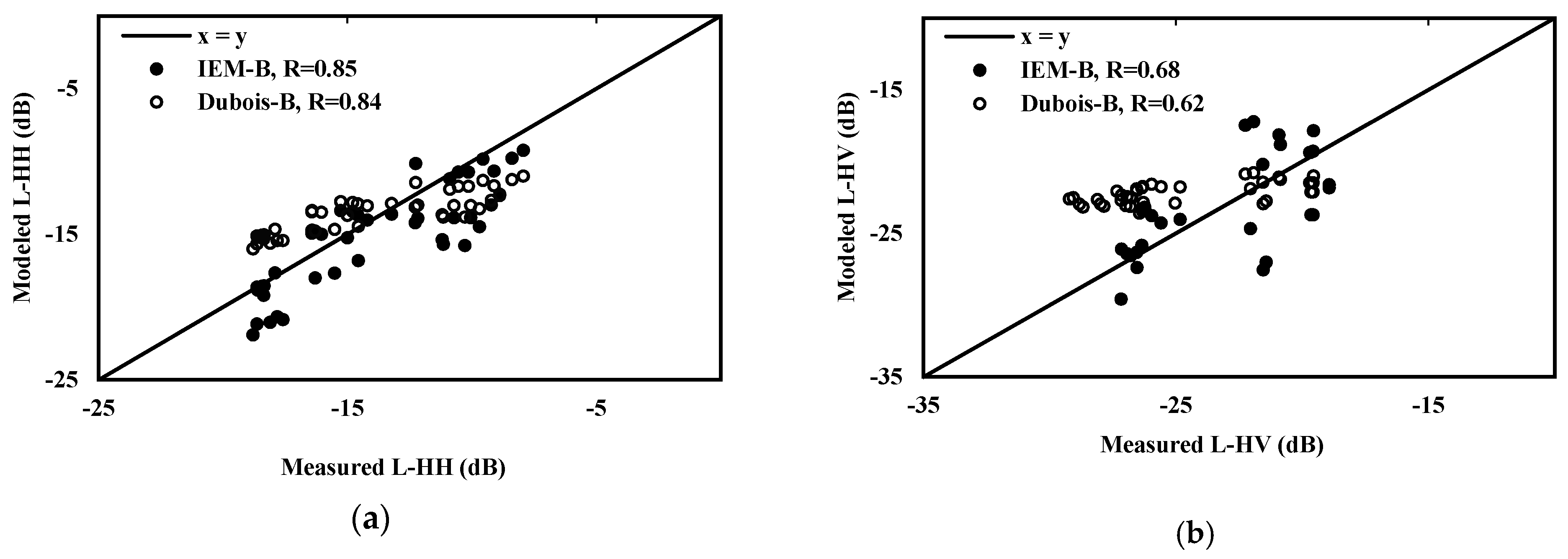
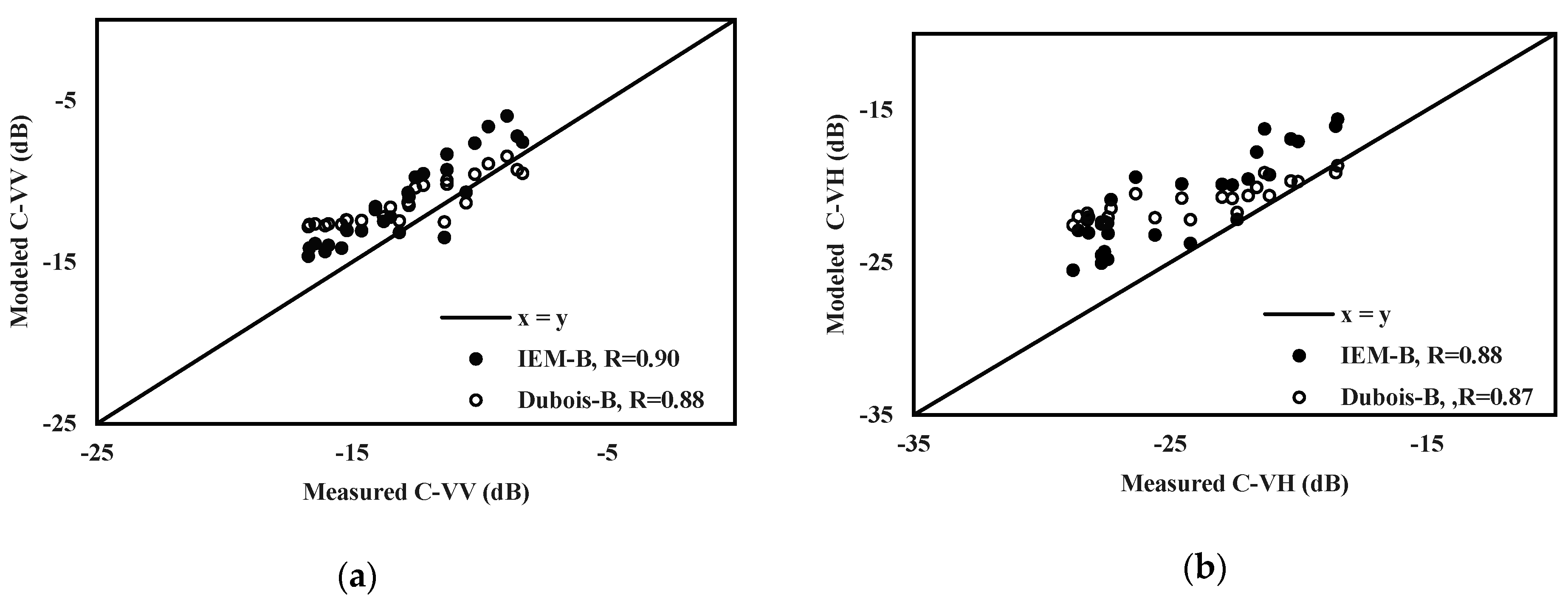
4.3.2. Case of Vegetation-Covered Soil
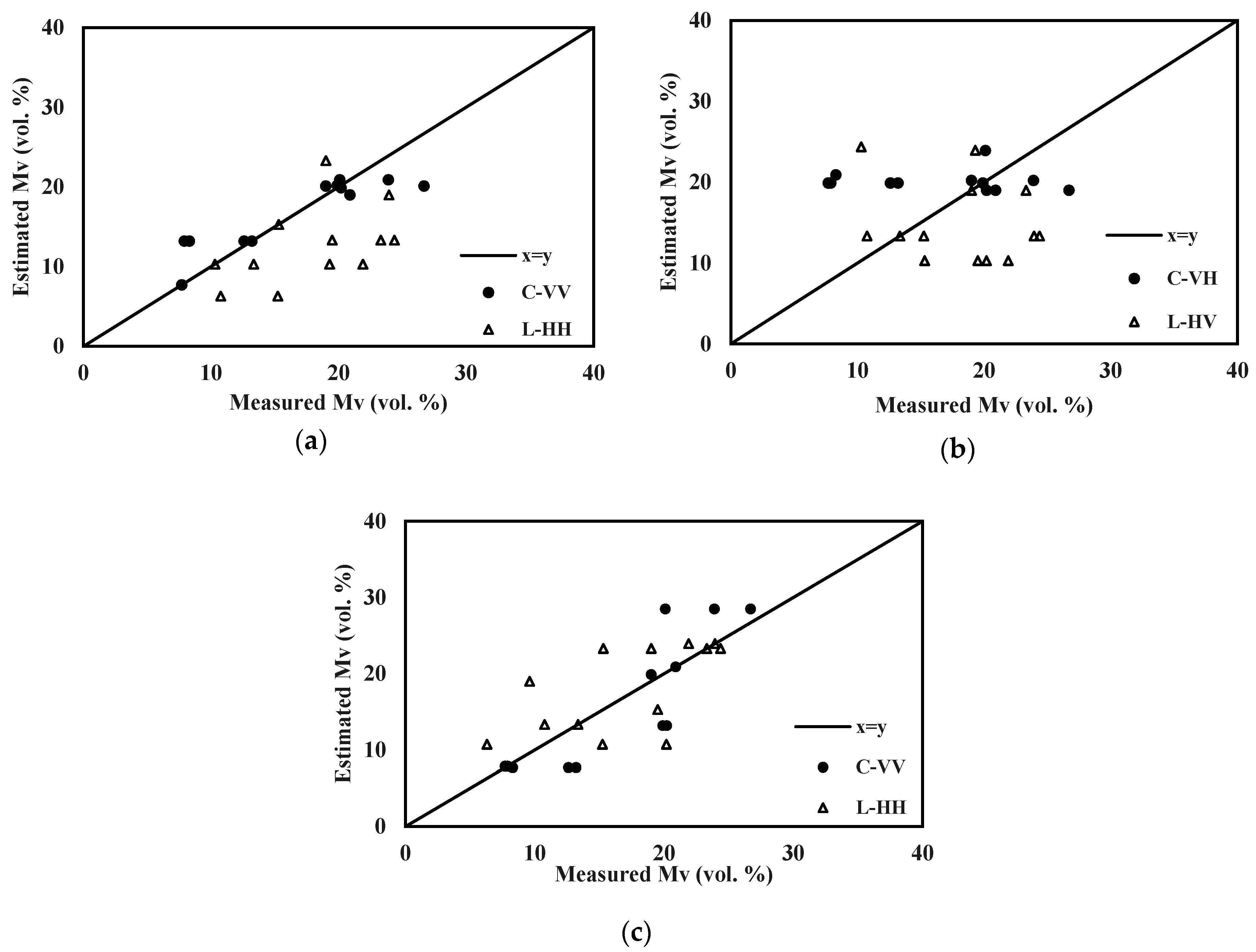
4.4. Soil Moisture Estimation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Koster, R.D.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Chan, E.; Cox, P.; Gordon, C.T.; Kanae, S.; Kowalczyk, E.; Lawrence, D.; et al. Regions of Strong Coupling Between Soil Moisture and Precipitation. Science 2004, 305, 1138–1140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Anguela, T.P.; Zribi, M.; Hasenauer, S.; Habets, F.; Loumagne, C. Analysis of surface and root-zone soil moisture dynamics with ERS scatterometer and the hydrometeorological model SAFRAN-ISBA-MODCOU at Grand Morin watershed (France). Hydrol. Earth Syst. Sci. 2008, 12, 1415–1424. [Google Scholar] [CrossRef] [Green Version]
- Saux-Picart, S.; Ottlé, C.; Decharme, B.; André, C.; Zribi, M.; Perrier, A.; Coudert, B.; Boulain, N.; Cappelaere, B.; Descroix, L.; et al. Water and energy budgets simulation over the AMMA-Niger super-site spatially constrained with remote sensing data. J. Hydrol. 2009, 375, 287–295. [Google Scholar] [CrossRef]
- Manfreda, S.; Scanlon, T.M.; Caylor, K.K. On the importance of accurate depiction of infiltration processes on modelled soil moisture and vegetation water stress. Ecohydrology 2009, 3, 155–165. [Google Scholar] [CrossRef]
- Massari, C.; Brocca, L.; Moramarco, T.; Tramblay, Y.; Lescot, J.F.D. Potential of soil moisture observations in flood modelling estimating initial conditions and correcting rainfall. Adv. Water Resour. 2014, 74, 44–53. [Google Scholar] [CrossRef]
- Habets, F.; Gascoin, S.; Korkmaz, S.; Thiéry, D.; Zribi, M.; Amraoui, N.; Carli, M.; Ducharne, A.; Leblois, E.; LeDoux, E.; et al. Multi-model comparison of a major flood in the groundwater-fed basin of the Somme River (France). Hydrol. Earth Syst. Sci. 2010, 14, 99–117. [Google Scholar] [CrossRef] [Green Version]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.-J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS Mission: New Tool for Monitoring Key Elements of the Global Water Cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef] [Green Version]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Wagner, W.; Lemoine, G.; Rott, H. A Method for Estimating Soil Moisture from ERS Scatterometer and Soil Data. Remote Sens. Environ. 1999, 70, 191–207. [Google Scholar] [CrossRef]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P.; et al. Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Chen, K.; Yen, S.; Huang, W. A simple model for retrieving bare soil moisture from radar-scattering coefficients. Remote Sens. Environ. 1995, 54, 121–126. [Google Scholar] [CrossRef]
- McNairn, H.; Brisco, B. The application of C-band polarimetric SAR for agriculture: A review. Can. J. Remote Sens. 2004, 30, 525–542. [Google Scholar] [CrossRef]
- Srivastava, H.S.; Patel, P.; Sharma, Y.; Navalgund, R.R. Large-Area Soil Moisture Estimation Using Multi-Incidence-Angle RADARSAT-1 SAR Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2528–2535. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Bignami, C. Soil moisture estimation over vegetated terrains using multitemporal remote sensing data. Remote Sens. Environ. 2010, 114, 440–448. [Google Scholar] [CrossRef]
- Du, J.; Shi, J.; Sun, R. The development of HJ SAR soil moisture retrieval algorithm. Int. J. Remote Sens. 2010, 31, 3691–3705. [Google Scholar] [CrossRef]
- Balenzano, A.; Mattia, F.; Satalino, G.; Davidson, M.W.J. Dense Temporal Series of C- and L-band SAR Data for Soil Moisture Retrieval Over Agricultural Crops. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 439–450. [Google Scholar] [CrossRef]
- Santi, E.; Dabboor, M.; Pettinato, S.; Paloscia, S. Combining Machine Learning and Compact Polarimetry for Estimating Soil Moisture from C-Band SAR Data. Remote Sens. 2019, 11, 2451. [Google Scholar] [CrossRef] [Green Version]
- Gorrab, A.; Zribi, M.; Baghdadi, N.; Mougenot, B.; Lili-Chaabane, Z. Retrieval of both soil moisture and texture using TerraSAR-X images. Remote Sens. 2015, 7, 10098–10116. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Magagi, R.; Goita, K.; Jagdhuber, T.; Hajnsek, I. Evaluation of Simplified Polarimetric Decomposition for Soil Moisture Retrieval over Vegetated Agricultural Fields. Remote Sens. 2016, 8, 142. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Magagi, R.; Goita, K.; Jagdhuber, T. Refining a Polarimetric Decomposition of Multi-Angular UAVSAR Time Series for Soil Moisture Retrieval Over Low and High Vegetated Agricultural Fields. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1431–1450. [Google Scholar] [CrossRef]
- Verhoest, N.E.C.; Lievens, H.; Wagner, W.; Alvarez-Mozos, J.; Moran, M.S.; Mattia, F. On the soil roughness parameterization problem in soil moisture retrieval of bare surfaces from Synthetic Aperture Radar. Sensors 2008, 8, 4213–4248. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Li, X.; McCabe, M.F. Retrieval of High-Resolution Soil Moisture through Combination of Sentinel-1 and Sentinel-2 Data. Remote Sens. 2020, 12, 2303. [Google Scholar] [CrossRef]
- Shi, J.; Wang, J.; Hsu, A.Y.; O’Neill, P.E.; Engman, E.T. Estimation of bare surface soil moisture and surface roughness parameter using L-band SAR image data. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1254–1266. [Google Scholar]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Rodríguez-Fernández, N.; Wigneron, J.P.; Al-Yaari, A.; Al Bitar, A.; Albergel, C.; Calvet, J.-C. Evaluation of SMOS, SMAP, ASCAT and Sentinel-1 Soil Moisture Products at Sites in Southwestern France. Remote Sens. 2018, 10, 569. [Google Scholar] [CrossRef] [Green Version]
- Mohanty, B.P.; Cosh, M.H.; Lakshmi, V.; Montzka, C. Soil Moisture Remote Sensing: State-of-the-Science. Vadose Zone J. 2017, 16, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Zribi, M.; Dechambre, M. A new empirical model to retrieve soil moisture and roughness from C-band radar data. Remote Sens. Environ. 2003, 84, 42–52. [Google Scholar] [CrossRef]
- Bousbih, S.; Zribi, M.; Lili-Chabaane, Z.; Baghdadi, N.; El Hajj, M.; Gao, Q.; Mougenot, B. Potential of Sentinel-1 Radar Data for the Assessment of Soil and Cereal Cover Parameters. Sensors 2017, 17, 2617. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dubois, P.; Van Zyl, J.; Engman, T. Measuring soil moisture with imaging radars. IEEE Trans. Geosci. Remote Sens. 1995, 33, 915–926. [Google Scholar] [CrossRef] [Green Version]
- Oh, Y.; Sarabandi, K.; Ulabz, F.T. An emprical model and an inversion technique for radar scattering from bare soil surfaces. IEEE Trans. Geosci. Remote Sens. 1992, 30, 370–381. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive. 3-From Theory to Applications; Artech House: Norwood, MA, USA, 1986. [Google Scholar]
- Fung, A.; Li, Z.; Chen, K. Backscattering from a randomly rough dielectric surface. IEEE Trans. Geosci. Remote Sens. 1992, 30, 356–369. [Google Scholar] [CrossRef]
- Zribi, M.; Taconet, O.; Le Hégarat-Mascle, S.; Vidal-Madjar, D.; Emblanch, C.; Loumagne, C.; Normand, M. Backscattering behavior and simulation comparison over bare soils using SIR-C/X-SAR and ERASME 1994 data over Orgeval. Remote Sens. Environ. 1997, 59, 256–266. [Google Scholar] [CrossRef]
- Baghdadi, N.; Zribi, M. Evaluation of radar backscatter models IEM, OH and Dubois using experimental observations. Int. J. Remote Sens. 2006, 27, 3831–3852. [Google Scholar] [CrossRef]
- Baghdadi, N.; Saba, E.; Aubert, M.; Zribi, M.; Baup, F. Evaluation of Radar Backscattering Models IEM, Oh, and Dubois for SAR Data in X-Band Over Bare Soils. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1160–1164. [Google Scholar] [CrossRef]
- Choker, M.; Baghdadi, N.; Zribi, M.; El Hajj, M.; Paloscia, S.; Verhoest, N.E.C.; Lievens, H.; Mattia, F. Evaluation of the Oh, Dubois and IEM Backscatter Models Using a Large Dataset of SAR Data and Experimental Soil Measurements. Water 2017, 9, 38. [Google Scholar] [CrossRef]
- Baghdadi, N.; Gherboudj, I.; Zribi, M.; Sahebi, M.; King, C.; Bonn, F. Semi-empirical calibration of the IEM backscattering model using radar images and moisture and roughness field measurements. Int. J. Remote Sens. 2004, 25, 3593–3623. [Google Scholar] [CrossRef]
- Baghdadi, N.; Zribi, M.; Paloscia, S.; Verhoest, N.E.C.; Lievens, H.; Baup, F.; Mattia, F. Semi-Empirical Calibration of the Integral Equation Model for Co-Polarized L-Band Backscattering. Remote Sens. 2015, 7, 13626–13640. [Google Scholar] [CrossRef] [Green Version]
- Karam, M.; Fung, A.; Antar, Y. Electromagnetic wave scattering from some vegetation samples. IEEE Trans. Geosci. Remote Sens. 1988, 26, 799–808. [Google Scholar] [CrossRef] [Green Version]
- Ulaby, F.; McDonald, K.; Sarabandi, K.; Dobson, M. Michigan Microwave Canopy Scattering Models (MIMICS). Int. J. Remote Sens. 1990, 11, 1223–1253. [Google Scholar] [CrossRef]
- Attema, E.P.W.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Graham, A.J.; Harris, R. Extracting biophysical parameters from remotely sensed radar data: A review of the water cloud model. Prog. Phys. Geogr. Earth Environ. 2003, 27, 217–229. [Google Scholar] [CrossRef]
- Baghdadi, N.; El Hajj, M.; Zribi, M.; Bousbih, S. Calibration of the Water Cloud Model at C-Band for Winter Crop Fields and Grasslands. Remote Sens. 2017, 9, 969. [Google Scholar] [CrossRef] [Green Version]
- Weiß, T.; Ramsauer, T.; Löw, A.; Marzahn, P. Evaluation of Different Radiative Transfer Models for Microwave Backscatter Estimation of Wheat Fields. Remote Sens. 2020, 12, 3037. [Google Scholar] [CrossRef]
- Ouaadi, N.; Jarlan, L.; Ezzahar, J.; Zribi, M.; Khabba, S.; Bouras, E.; Bousbih, S.; Frison, P.-L. Monitoring of wheat crops using the backscattering coefficient and the interferometric coherence derived from Sentinel-1 in semi-arid areas. Remote Sens. Environ. 2020, 251, 112050. [Google Scholar] [CrossRef]
- Zribi, M.; Chahbi, A.; Shabou, M.; Lilichabaane, Z.; Duchemin, B.; Baghdadi, N.; Amri, R.; Chehbouni, A. Soil surface moisture estimation over a semi-arid region using ENVISAT ASAR radar data for soil evaporation evaluation. Hydrol. Earth Syst. Sci. 2011, 15, 345–358. [Google Scholar] [CrossRef] [Green Version]
- Fieuzal, R.; Baup, F.; Marais-Sicre, C. Monitoring wheat and rapeseed by using synchronous optical and radar satellite data—From temporal signatures to crop parameters estimation. Adv. Remote Sens. 2013, 2, 162–180. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.B.; Moghaddam, M.; Tsang, L.; Burgin, M.; Xu, X.; Njoku, E.G. Models of L-band radar backscattering coefficients over global terrain for soil moisture retrieval. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1381–1396. [Google Scholar] [CrossRef]
- Kim, S.B.; van Zyl, J.J.; Johnson, J.T.; Moghaddam, M.; Tsang, L.; Colliander, A.; Dunbar, R.S.; Jackson, T.J.; Jaruwatanadilok, S.; West, R.; et al. Surface Soil Moisture Retrieval Using the L-Band Synthetic Aperture Radar Onboard the Soil Moisture Active–Passive Satellite and Evaluation at Core Validation Sites. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1897–1914. [Google Scholar] [CrossRef] [PubMed]
- Notarnicola, C.; Angiulli, M.; Posa, F. Soil moisture retrieval from remotely sensed data: Neural network approach versus Bayesian method. IEEE Trans. Geosci. Remote Sens. 2008, 46, 547–557. [Google Scholar] [CrossRef]
- Santi, E.; Paloscia, S.; Pettinato, S.; Fontanelli, G. Application of artificial neural networks for the soil moisture retrieval from active and passive microwave spaceborne sensors. Int. J. Appl. Earth Obs.Geoinf. 2016, 48, 61–73. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic use of Sentinel-1 and Sentinel-2 images for operational soil moisture mapping at high spatial resolution over agricultural areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef] [Green Version]
- Gao, Q.; Zribi, M.; Escorihuela, M.J.; Baghdadi, N. Synergetic Use of Sentinel-1 and Sentinel-2 Data for Soil Moisture Mapping at 100 m Resolution. Sensors 2017, 17, 1966. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward Global Soil Moisture Monitoring With Sentinel-1: Harnessing Assets and Overcoming Obstacles. IEEE Trans. Geosci. Remote Sens. 2018, 57, 520–539. [Google Scholar] [CrossRef]
- Foucras, M.; Zribi, M.; Albergel, C.; Baghdadi, N.; Calvet, J.-C.; Pellarin, T. Estimating 500-m Resolution Soil Moisture Using Sentinel-1 and Optical Data Synergy. Water 2020, 12, 866. [Google Scholar] [CrossRef] [Green Version]
- Bousbih, S.; Zribi, M.; El Hajj, M.; Baghdadi, N.; Lili-Chabaane, Z.; Gao, Q.; Fanise, P. Soil Moisture and Irrigation Mapping in A Semi-Arid Region, Based on the Synergetic Use of Sentinel-1 and Sentinel-2 Data. Remote Sens. 2018, 10, 1953. [Google Scholar] [CrossRef] [Green Version]
- Panciera, R.; Tanase, M.A.; Lowell, K.; Walker, J.P. Evaluation of IEM, Dubois, and Oh Radar Backscatter Models Using Airborne L-Band SAR. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4966–4979. [Google Scholar] [CrossRef]
- Dabrowska-Zielinska, K.; Inoue, Y.; Kowalik, W.; Gruszczynska, M. Inferring the effect of plant and soil variables on C- and L-band SAR backscatter over agricultural fields, based on model analysis. Adv. Space Res. 2007, 39, 139–148. [Google Scholar] [CrossRef]
- Jagdhuber, T.; Hajnsek, I.; Bronstert, A.; Papathanassiou, K.P. Soil Moisture Estimation under Low Vegetation Cover Using a Multi-Angular Polarimetric Decomposition. IEEE Trans. Geosci. Remote Sens. 2012, 51, 2201–2215. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Bazzi, H.; Zribi, M. Penetration Analysis of SAR Signals in the C and L Bands for Wheat, Maize, and Grasslands. Remote Sens. 2018, 11, 31. [Google Scholar] [CrossRef] [Green Version]
- El Hajj, M.; Baghdadi, N.; Zribi, M. Comparative analysis of the accuracy of surface soil moisture estimation from the C- and L-bands. Int. J. Appl. Earth Obs.Geoinf. 2019, 82, 101888. [Google Scholar] [CrossRef]
- Zribi, M.; Muddu, S.; Bousbih, S.; Al Bitar, A.; Tomer, S.K.; Baghdadi, N.; Bandyopadhyay, S. Analysis of L-Band SAR Data for Soil Moisture Estimations over Agricultural Areas in the Tropics. Remote Sens. 2019, 11, 1122. [Google Scholar] [CrossRef] [Green Version]
- Sekertekin, A.; Marangoz, A.M.; Abdikan, S. ALOS-2 and Sentinel-1 SAR data sensitivity analysis to surface soil moisture over bare and vegetated agricultural fields. Comput. Electron. Agric. 2020, 171, 105303. [Google Scholar] [CrossRef]
- Amri, R.; Zribi, M.; Duchemin, B.; Lili-Chabaane, Z.; Gruhier, C.; Chebouni, A. Analysis of vegetation behaviour in a semi-arid region, using SPOT-VEGETATION NDVI data. Remote Sens. 2011, 3, 2568–2590. [Google Scholar] [CrossRef] [Green Version]
- Zribi, M.; Gorrab, A.; Baghdadi, N. A new soil roughness parameter for the modelling of radar backscattering over bare soil. Remote Sens. Environ. 2014, 152, 62–73. [Google Scholar] [CrossRef] [Green Version]
- Baghdadi, N.; Choker, M.; Zribi, M.; El Hajj, M.; Paloscia, S.; Verhoest, N.E.C.; Lievens, H.; Baup, F.; Mattia, F. A New Empirical Model for Radar Scattering from Bare Soil Surfaces. Remote Sens. 2016, 8, 920. [Google Scholar] [CrossRef] [Green Version]
- Wu, T.-D.; Chen, K.; Shi, J.; Fung, A. A transition model for the reflection coefficient in surface scattering. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2040–2050. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Belaud, G.; Cheviron, B.; Courault, D.; Charron, F. Soil moisture retrieval over irrigated grassland using X-band SAR data. Remote Sens. Environ. 2016, 176, 202–218. [Google Scholar] [CrossRef] [Green Version]
- Fontanelli, G.; Paloscia, S.; Zribi, M.; Chahbi, A. Sensitivity analysis of X-band SAR to wheat and barley leaf area index in the Merguellil Basin. Remote Sens. Lett. 2013, 4, 1107–1116. [Google Scholar] [CrossRef] [Green Version]
- El Hajj, M.; Baghdadi, N.; Belaud, G.; Zribi, M.; Cheviron, B.; Courault, D.; Hagolle, O.; Charron, F. Irrigated Grassland Monitoring Using a Time Series of TerraSAR-X and COSMO-SkyMed X-Band SAR Data. Remote Sens. 2014, 6, 10002–10032. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Sensor Parameters | |||||
|---|---|---|---|---|---|---|
| Sensor | Angle | Polarizations | Pixel Spacing | Mode | Ascending/ Descending | |
| 20/11/2014 | ALOS-2 | 36° | HH + HV | 6 × 6 m | Strip Map | - |
| 19/11/2015 | ALOS-2 | 36° | HH + HV | 6 × 6 m | Strip Map | - |
| 05/03/2016 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | - |
| 26/11/2016 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | - |
| 26/10/2019 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | Ascending |
| 27/10/2019 | Sentinel-1 | 39° | VV + VH | 10 × 10 m | Interferometric wide swath | Ascending |
| 09/11/2019 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | Ascending |
| 09/11/2019 | Sentinel-1 | 39° | VV + VH | 10 × 10 m | Interferometric wide swath | Descending |
| 23/11/2019 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | Ascending |
| 07/12/2019 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | Ascending |
| 20/12/2019 | Sentinel-1 | 39° | VV + VH | 10 × 10 m | Interferometric wide swath | Ascending |
| 04/01/2020 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | Ascending |
| 13/01/2020 | Sentinel-1 | 39° | VV + VH | 10 × 10 m | Interferometric wide swath | Ascending |
| 01/02/2020 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | Ascending |
| 01/02/2020 | Sentinel-1 | 39° | VV + VH | 10 × 10 m | Interferometric wide swath | Descending |
| 15/02/2020 | ALOS-2 | 28° | HH + HV | 6 × 6 m | Strip Map | Ascending |
| 01/02/2020 | Sentinel-1 | 39° | VV + VH | 10 × 10 m | Interferometric wide swath | Descending |
| 24/02/2020 | Sentinel-1 | 39° | VV + VH | 10 × 10 m | Interferometric wide swath | Ascending |
| 25/05/2020 | ALOS-2 | 32.5° | HH + HV | 6 × 6 m | Strip Map | Descending |
| Date | Measurements | |||||
|---|---|---|---|---|---|---|
| Hrms (cm) | Lc (cm) | Mv (vol.%) | H (cm) | LAI (m2/m2) | VWC (kg/m2) | |
| 20/11/2014 | [1.10–3.52] | [2.83–6.86] | [3.0–9.3] | - | - | - |
| 19/11/2015 | [0.56–4.34] | [2.48–8.89] | [5.2–9.6] | - | - | - |
| 05/03/2016 | [0.56–3.24] | [2.48–7.69] | [4.5–8.7] | - | - | - |
| 26/11/2016 | [0.49–4.55] | [2.87–9.58] | [10.2–42.9] | - | - | - |
| 26/10/2019 | [0.46–6.46] | [3.45–10.11] | [6.6–25.5] | - | - | - |
| 27/10/2019 | [0.46–6.46] | [3.45–10.11] | [5.8–30.5] | - | - | - |
| 09/11/2019 | - | - | [13.6–30.1] | - | - | - |
| 23/11/2019 | - | - | [6.0–23.9] | - | - | - |
| 07/12/2019 | [0.46–6.46] | [2.8–10.11] | [9.1–30.4] | - | - | - |
| 20/12/2019 | [0.46–4.55] | [2.8–10.11] | [7.6–28.5] | [16.8–41.3] | [1.20–2.83] | [0.1–0.9] |
| 04/01/2020 | - | - | [4.5–25.9] | [20–49.6] | [0.9–3.1] | [0.1–0.9] |
| 13/01/2020 | - | - | [6.5–32.8] | [10.7–53.5] | [0.7–3.62] | - |
| 01/02/2020 | - | - | [4.6–28.2] | [15.2–83.2] | [0.31–4.06] | [0.07–0.9] |
| 15/02/2020 | - | - | [3.7–32.1] | [25.6–100] | [0.8–4.50] | - |
| 24/02/2020 | [0.46–4.55] | [0.8–10.11] | [5.9–33.1] | [28.1–105] | [1.1–4.03] | [0.13–1.09] |
| 25/05/2020 | [0.46–3.95] | [2.8–10.11] | [3.4–21.2] | - | - | - |
| Sensor | ALOS-2 | Sentinel-1 | ||||||
|---|---|---|---|---|---|---|---|---|
| Polarization | L-HH | L-HV | C-VV | C-VH | ||||
| Incidence Angle | 28° | 32.5° | 36° | 28° | 32.5° | 36° | 39° | 39° |
| R ( | 0.86 | 0.93 | 0.83 | 0.77 | 0.83 | 0.82 | 0.85 | 0.56 |
| R ( | 0.87 | 0.92 | 0.7 | 0.73 | 0.82 | 0.75 | 0.88 | 0.55 |
| Sensor | ALOS-2 | Sentinel-1 | ||||||
|---|---|---|---|---|---|---|---|---|
| Configuration | L-HH | L-HV | C-VV | C-VH | ||||
| Parameters | Slope (dB/vol.) | R | Slope (dB/vol.) | R | Slope (dB/vol.) | R | Slope (dB/vol.) | R |
| NDVI ≤ 0.3 | 0.31 | 0.73 | 0.18 | 0.59 | 0.26 | 0.56 | 0.24 | 0.47 |
| 0.3 < NDVI < 0.6 | 0.27 | 0.51 | 0.15 | 0.28 | 0.17 | 0.59 | 0.08 | 0.33 |
| NDVI ≥ 0.6 | 0.19 | 0.35 | 0.16 | 0.35 | 0.07 | 0.20 | 0.09 | 0.37 |
| Model | IEM-B | Dubois-B | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Configuration | L-HH | L-HV | L-HH | L-HV | |||||
| Statistic parameter (dB) | Bias | RMSE | Bias | RMSE | Bias | RMSE | Bias | RMSE | |
| ALOS-2 | 28° | 1.3 | 2.0 | 0.3 | 3.2 | −0.4 | 2.5 | −2.5 | 2.9 |
| 32.5° | 0.5 | 1.9 | −0.6 | 3.3 | −1.7 | 2.7 | −2.7 | 2.3 | |
| 36° | 2.0 | 2.1 | 5.6 | 4.5 | −0.5 | 2.4 | −2.6 | 2.7 | |
| Configuration | C-VV | C-VH | C-VV | C-VH | |||||
| Statistic parameter (dB) | Bias | RMSE | Bias | RMSE | Bias | RMSE | Bias | RMSE | |
| Sentinel-1 | 39° | −1.8 | 1.3 | −3.5 | 1.7 | −1.6 | 1.5 | −3.4 | 2.3 |
| Model | h(Mv, Zs) | g(Mv, Hrms) | ||||||
|---|---|---|---|---|---|---|---|---|
| Sensor | ALOS-2 | Sentinel-1 | ALOS-2 | Sentinel-1 | ||||
| Configuration | L-HH | L-HV | C-VV | C-VH | L-HH | L-HV | C-VV | C-VH |
| α | 0.182 | 0.109 | 0.237 | 0.241 | 0.174 | 0.102 | 0.232 | 0.238 |
| β | 1.452 | 1.18 | 2.347 | 3.597 | 2.69 | 2.37 | 1.219 | 1.826 |
| γ | −16.01 | −26.48 | −16.43 | −28.27 | −18.14 | −28.27 | −14.42 | −25.03 |
| RMSE (dB) | 1.2 | 1.0 | 1.3 | 1.4 | 1.4 | 1.0 | 1.2 | 1.3 |
| R | 0.88 | 0.84 | 0.85 | 0.89 | 0.82 | 0.85 | 0.87 | 0.9 |
| Model | g(Mv, Hrms) | IEM-B | ||||
|---|---|---|---|---|---|---|
| Sensor | ALOS-2 | Sentinel-1 | ALOS-2 | Sentinel-1 | ||
| Configuration | L-HH | L-HV | C-VV | C-VH | L-HH | C-VV |
| A | 0.038 | 0.003 | 0.081 | 0.027 | 0.034 | 0.117 |
| B | 0.4 | 0.343 | 0.555 | 0.529 | 0.756 | 1.541 |
| R | 0.77 | 0.64 | 0.83 | 0.93 | 0.72 | 0.86 |
| RMSE (dB) | 1.6 | 1.7 | 1.4 | 1.3 | 2.0 | 1.3 |
| Model | g(Mv, Hrms) | IEM-B | ||||
|---|---|---|---|---|---|---|
| Sensor | ALOS-2 | Sentinel-1 | ALOS-2 | Sentinel-1 | ||
| Configuration | L-HH | L-HV | C-VV | C-VH | L-HH | C-VV |
| A | 0.023 | 0.004 | 0.130 | 0.025 | 0.052 | 0.09 |
| B | 1.4 | 2.28 | 2.66 | 3.85 | 2.78 | 3.08 |
| C | 0.054 | 0.009 | 0.007 | −0.01 | 0.128 | 0.097 |
| R | 0.78 | 0.66 | 0.87 | 0.89 | 0.88 | 0.87 |
| RMSE (dB) | 1.6 | 1.6 | 1.2 | 1.8 | 2.4 | 1.2 |
| Model | g(Mv, Hrms) | IEM-B | |||||
|---|---|---|---|---|---|---|---|
| Configuration | L-HH | L-HV | C-VV | C-VH | L-HH | C-VV | |
| Option 1 | Bias (vol.%) | −0.86 | −3.62 | −1.84 | 1.6 | −1.24 | 1.05 |
| RMSE (vol.%) | 6.44 | 13.68 | 4.74 | 7.11 | 4.87 | 3.35 | |
| Option 2 | Bias (vol.%) | 1.86 | 2.93 | −0.10 | −2.88 | 2.76 | 0.73 |
| RMSE (vol.%) | 6.12 | 6.81 | 3.17 | 6.75 | 4.85 | 4.65 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ayari, E.; Kassouk, Z.; Lili-Chabaane, Z.; Baghdadi, N.; Bousbih, S.; Zribi, M. Cereal Crops Soil Parameters Retrieval Using L-Band ALOS-2 and C-Band Sentinel-1 Sensors. Remote Sens. 2021, 13, 1393. https://doi.org/10.3390/rs13071393
Ayari E, Kassouk Z, Lili-Chabaane Z, Baghdadi N, Bousbih S, Zribi M. Cereal Crops Soil Parameters Retrieval Using L-Band ALOS-2 and C-Band Sentinel-1 Sensors. Remote Sensing. 2021; 13(7):1393. https://doi.org/10.3390/rs13071393
Chicago/Turabian StyleAyari, Emna, Zeineb Kassouk, Zohra Lili-Chabaane, Nicolas Baghdadi, Safa Bousbih, and Mehrez Zribi. 2021. "Cereal Crops Soil Parameters Retrieval Using L-Band ALOS-2 and C-Band Sentinel-1 Sensors" Remote Sensing 13, no. 7: 1393. https://doi.org/10.3390/rs13071393
APA StyleAyari, E., Kassouk, Z., Lili-Chabaane, Z., Baghdadi, N., Bousbih, S., & Zribi, M. (2021). Cereal Crops Soil Parameters Retrieval Using L-Band ALOS-2 and C-Band Sentinel-1 Sensors. Remote Sensing, 13(7), 1393. https://doi.org/10.3390/rs13071393