
Detecting Offshore Drilling Rigs with Multitemporal NDWI: A Case Study in the Caspian Sea


Abstract
:
1. Introduction
2. Study Area
2.1. Physical Geographical Background
2.2. Oil and Gas Resource Endowment
3. Methodology
3.1. Data Sources and Data Preprocessing
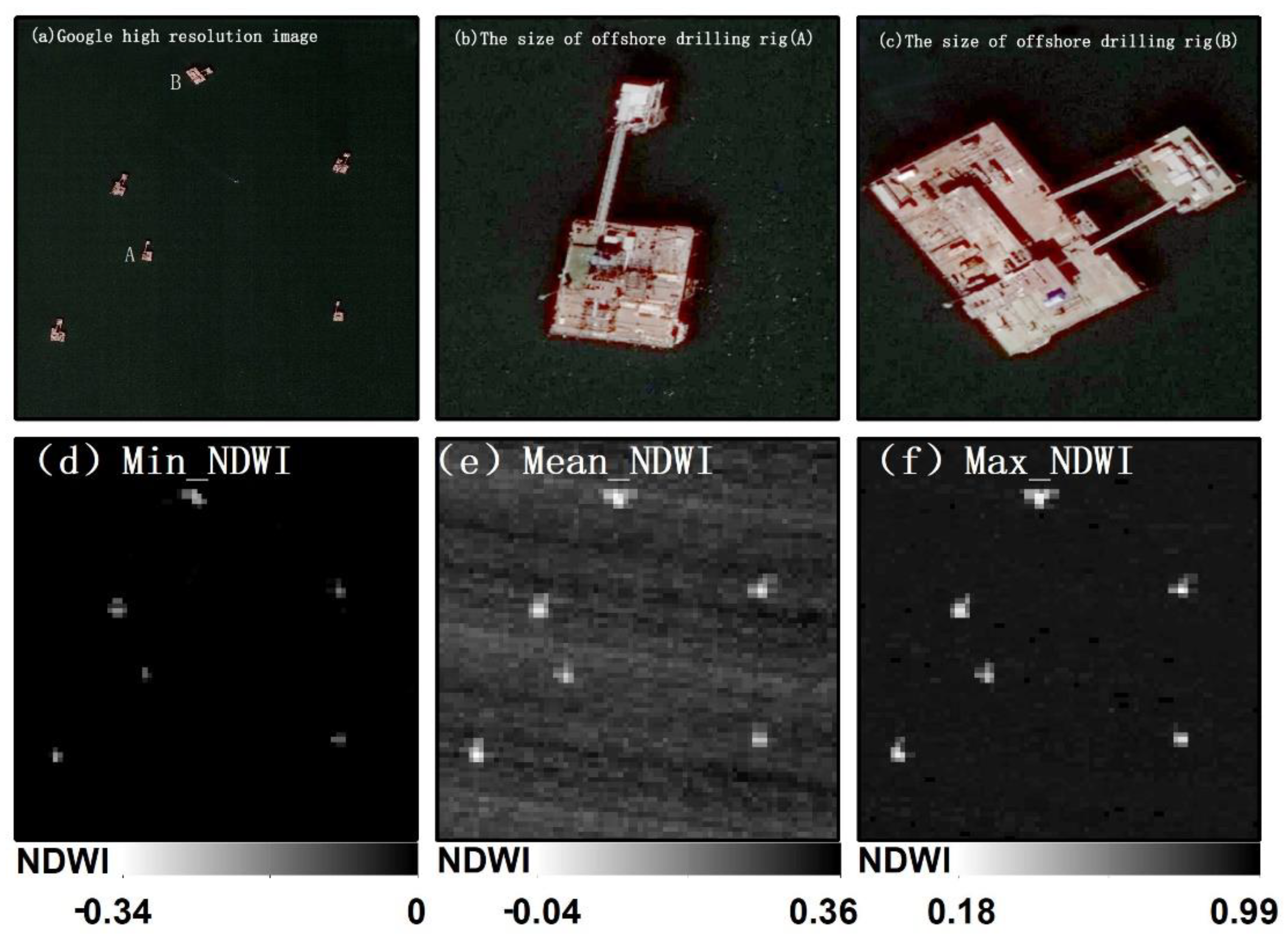
3.2. Offshore Drilling Rig Appearance in Remote Sensing Images
3.3. Establishment of NDWI Classification Rule
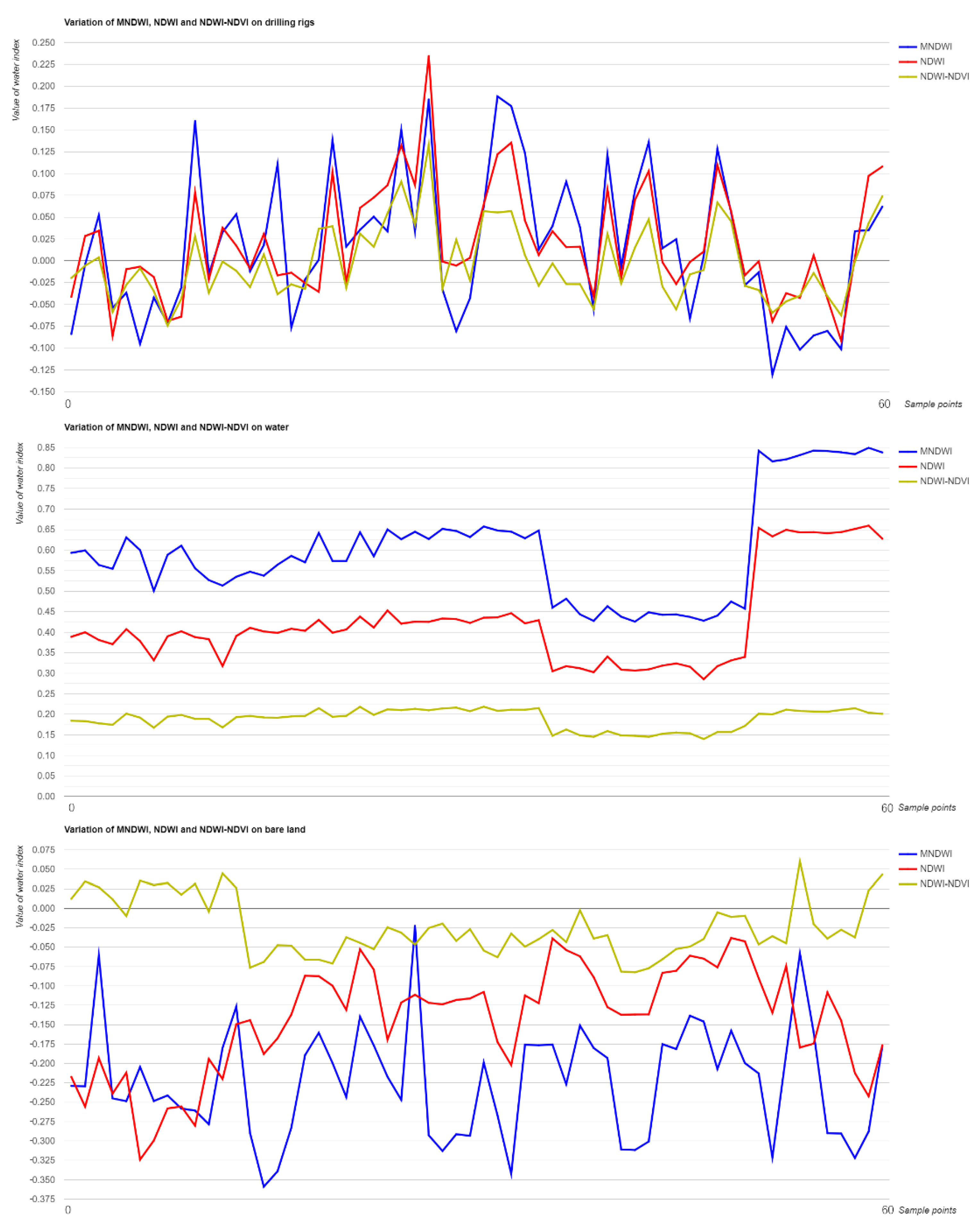
3.3.1. Distinguishability Analysis of Different Water Indexes on Drilling Platform, Water and Bare Land
3.3.2. NDWI
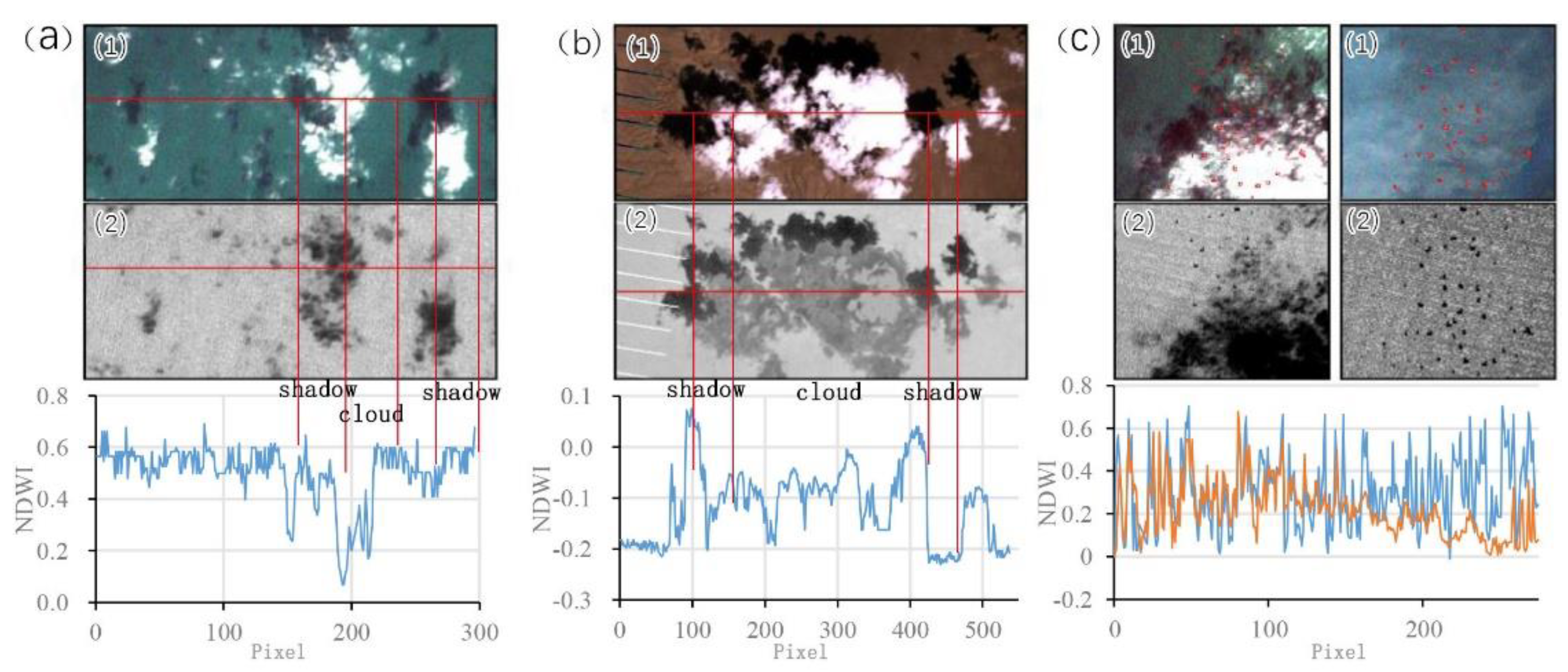
3.3.3. Effects of Clouds and Cloud Shadows on NDWI
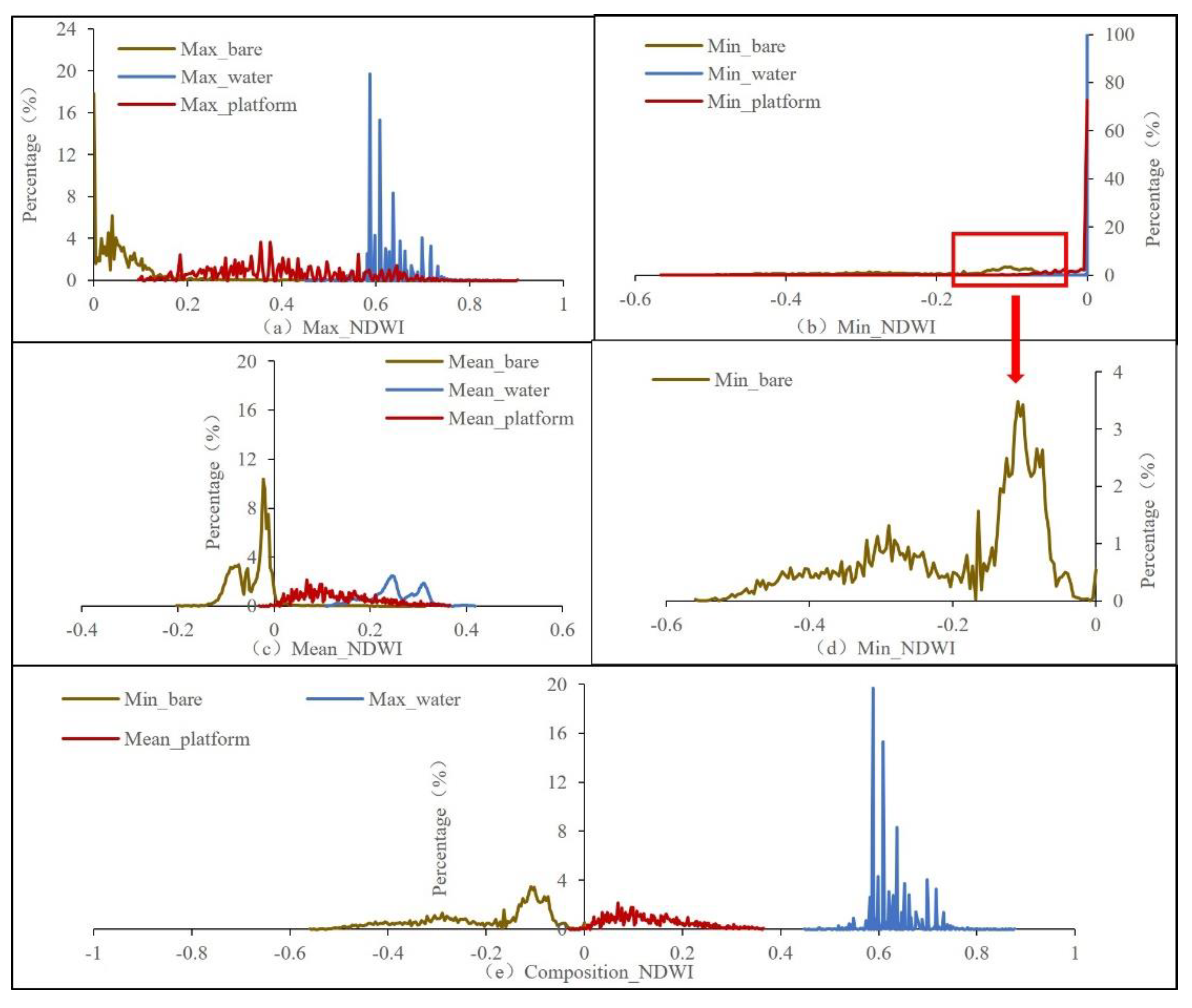
3.3.4. NDWI Feature Extraction for the Classification of Different Objects
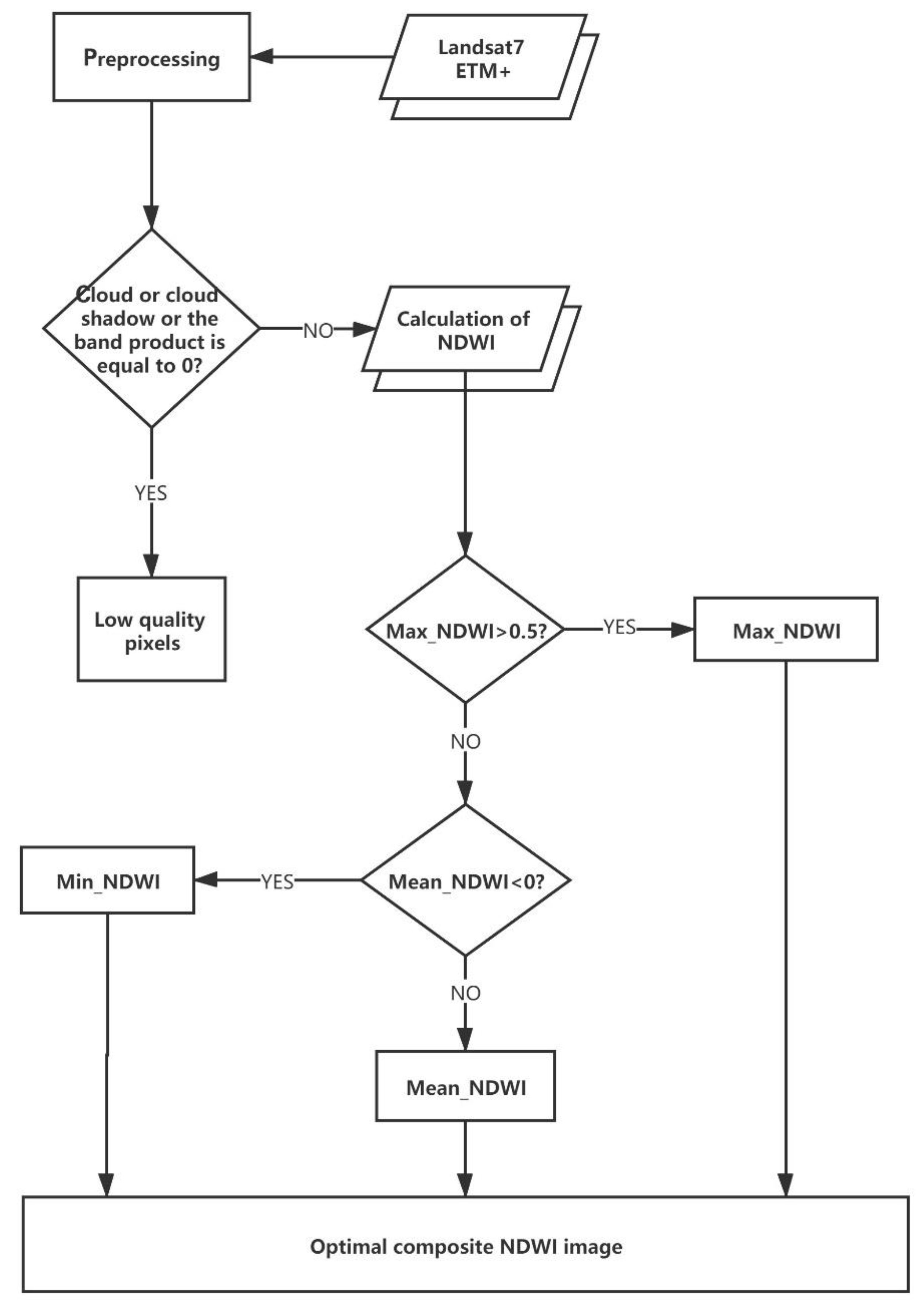
3.4. Offshore Drilling Rig Extraction Based on Optimal NDWI Composite
3.4.1. Preliminary Extraction of Offshore Drilling Rigs
3.4.2. Postprocessing of Offshore Drilling Rig Detection Results
4. Results and Discussion
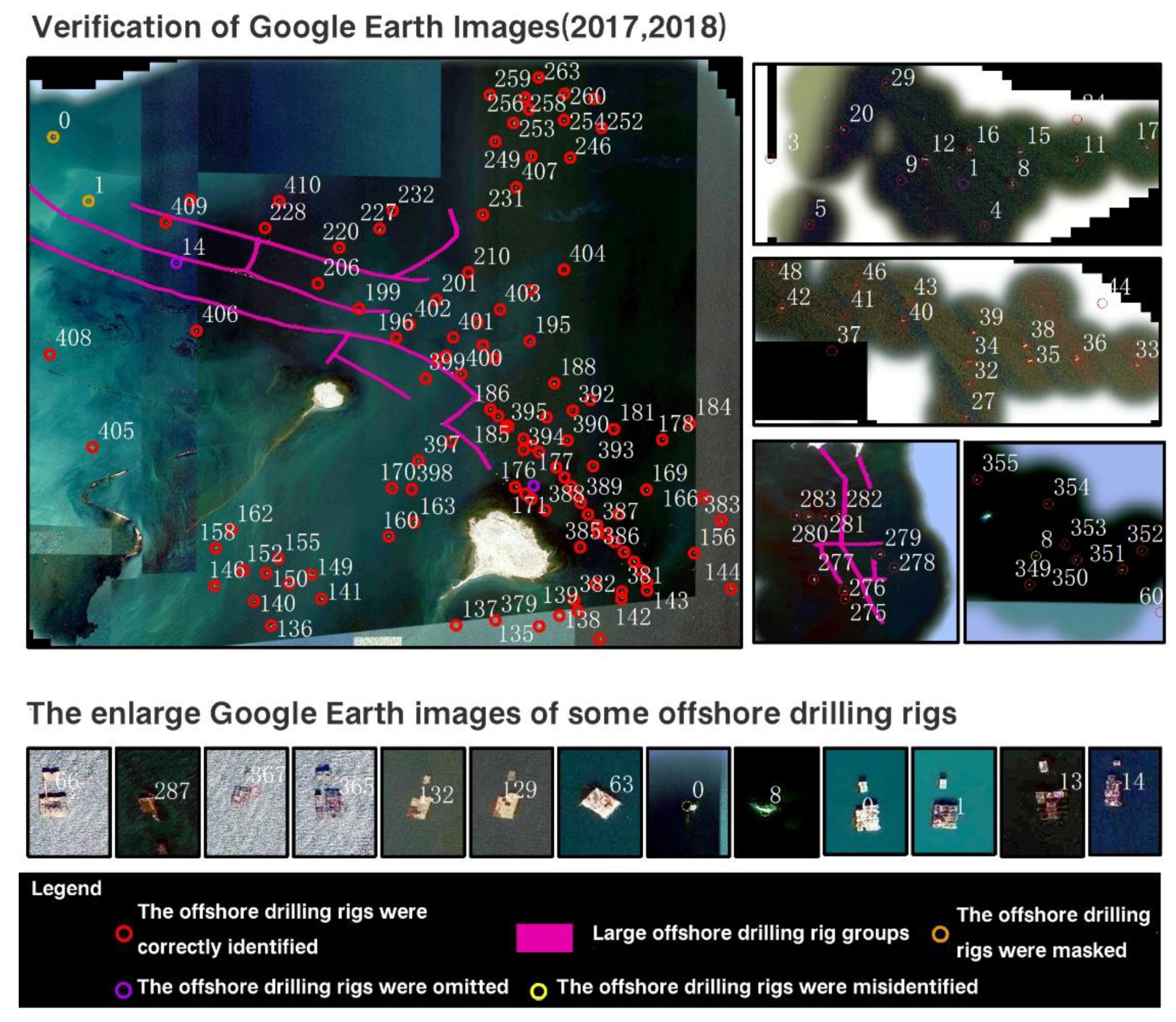
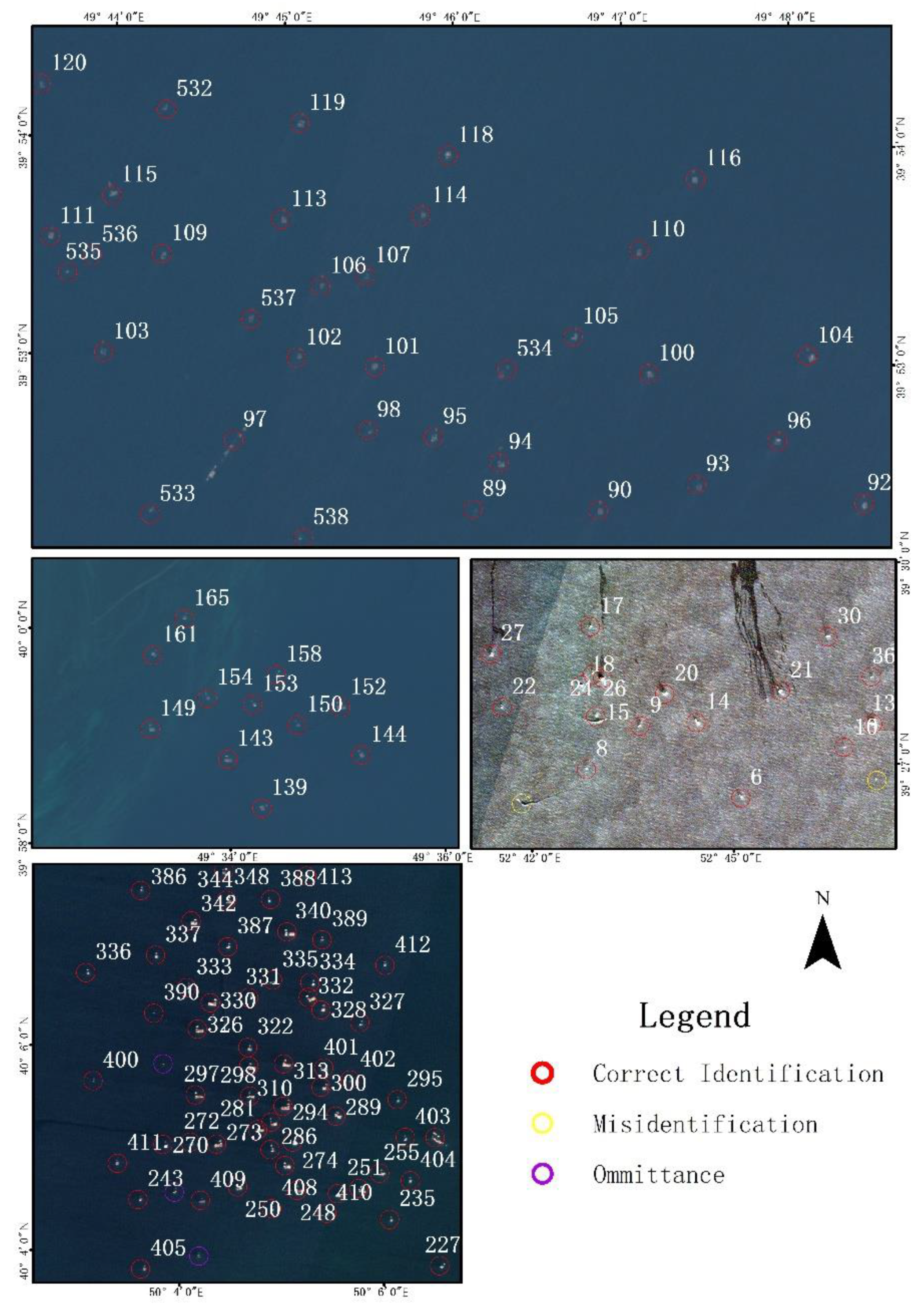
4.1. Identification Accuracy Analysis
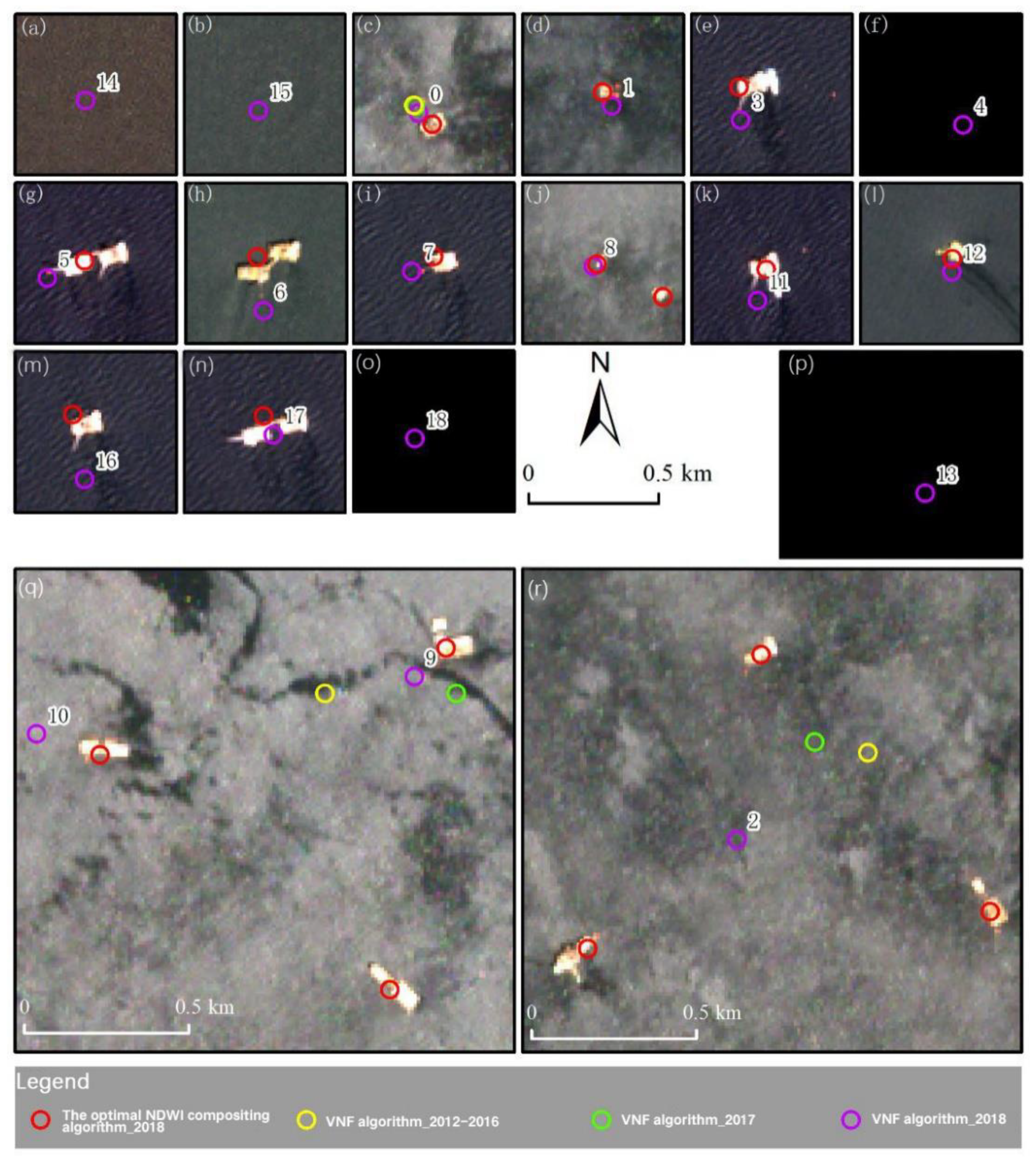
4.2. Comparison with Other Methods
4.2.1. Comparison with the Method Based on SAR Images
4.2.2. Comparison with the Method Based on Optical Remote Sensing Data
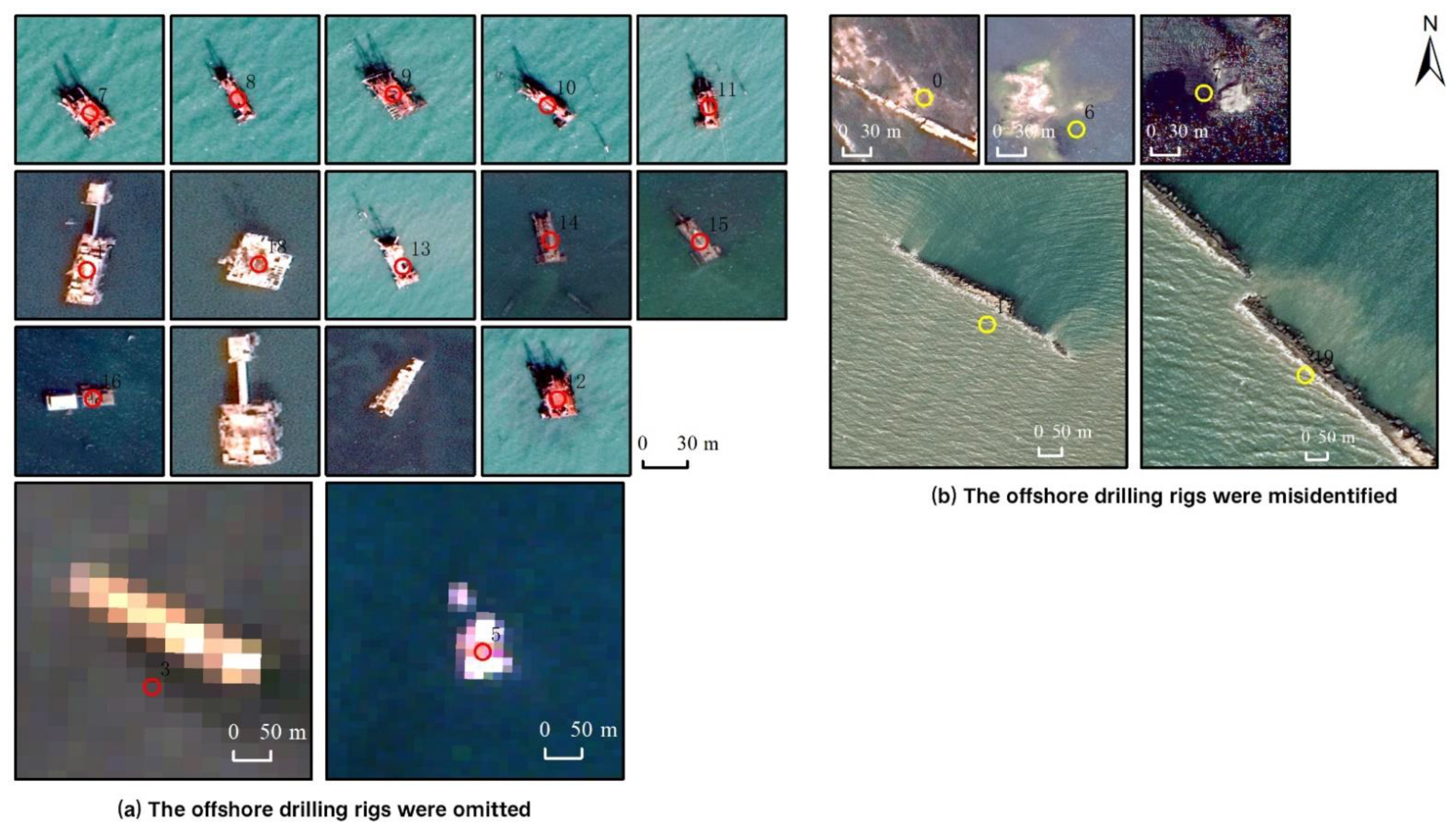
4.3. Missed and False Identification of Offshore Drilling Rigs
5. Conclusions
- A NDWI characteristics statistical analysis was carried out on the main disturbance ground object (water and bare ground) in order to identify offshore drilling rigs against the background of ocean or water, and a set of rules was established to effectively distinguish three objects to depict water (Max_NDWI > 0.55), bare ground (Min_NDWI < −0.05) and offshore drilling rig (0 < Mean_NDWI < 0.4). These rules can not only effectively distinguish water, bare land (islands) and offshore drilling rigs, but can also effectively select clean pixels from images partially polluted by clouds and cloud shadows to generate high quality NDWI composites. These high quality NDWI composites form the basis of a method to identify offshore drilling rigs with an overall accuracy reaching 90.2%.
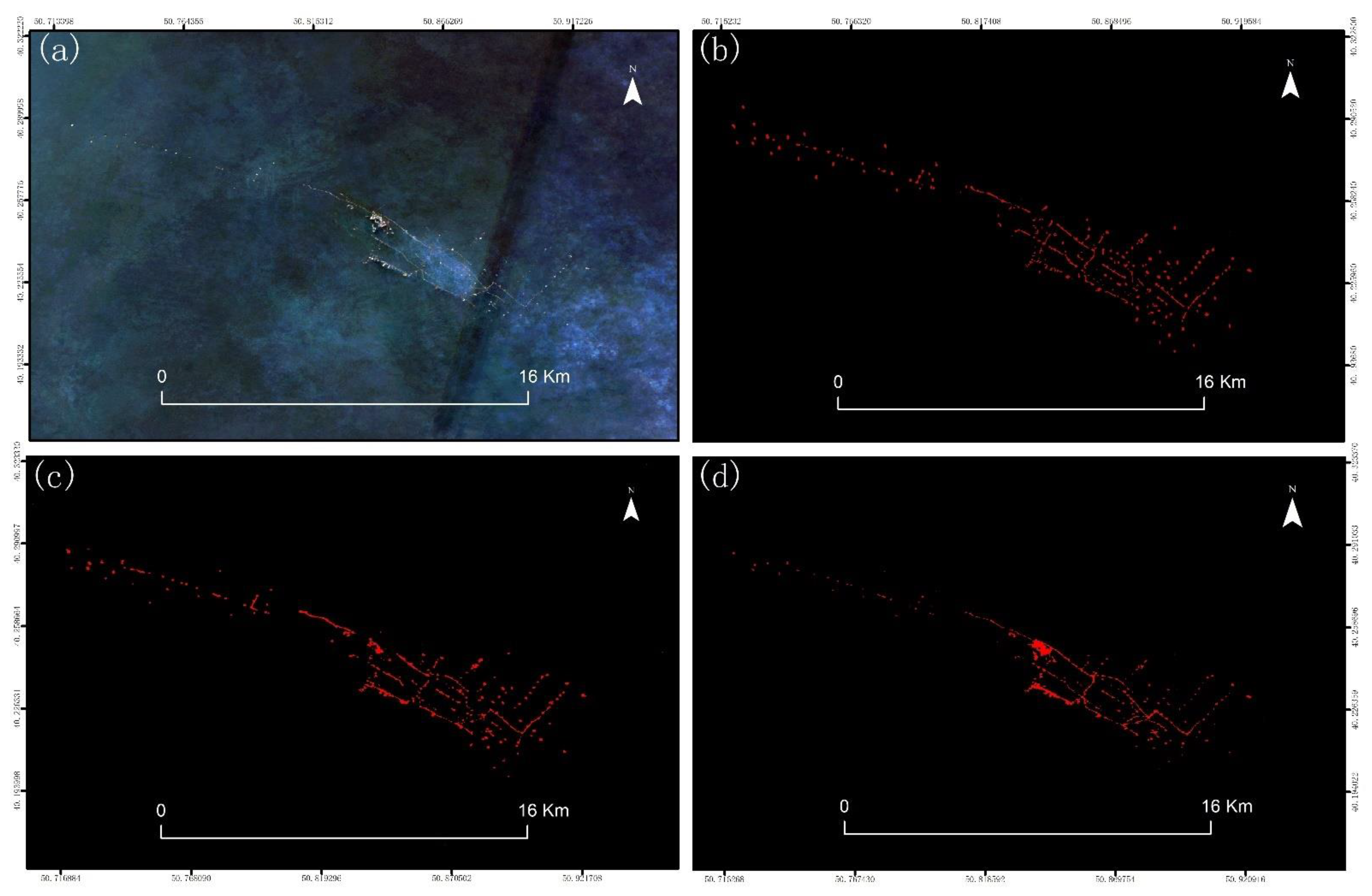
- The optimal NDWI compositing process considers images that were taken over two consecutive years, successfully excluding passing ships, clouds and cloud shadows, and other moving objects.
- The algorithm uses free ETM+ images to facilitate the monitoring of long time series. The optimal NDWI compositing rules are set based on a statistical analysis of the sample pixels in the region of interest, avoiding human subjectivity. Meanwhile, the algorithm is simple and easy to implement, and the GEE platform provides powerful computation. Furthermore, a spatial resolution of 30 m can effectively avoid missed identification with a coarse spatial resolution of night-light data. It also overcomes the defect that night-light ignition point data cannot identify offshore drilling rigs without a waste gas flame.
- One current limitation is the robustness of the method, which needs to be further confirmed. The algorithm was only used in the Caspian Sea with good water quality; future work should focus on the large-scale research of other sea areas such as the Gulf of Mexico or the Persian Gulf. Another limitation is that Landsat-7 ETM+ images are only used for static identification of oil and gas platforms in the Caspian region. The next step is to use multisource remote sensing images, such as Sentinel-2 imagery, Landsat-8 OLI imagery and SAR imagery, to conduct more comprehensive research of offshore oil and gas platforms so as to improve the recognition accuracy and time length in order to obtain temporal and spatial dynamic attribute information and establish a more complete global oil and gas platform information management system. Lastly, it is rather difficult to determine a distance for near-shore areas. An unsuitable buffer distance can miss rigs or make false identifications. As such, the method yielded results that were highly accurate in open waters but relatively inaccurate near the shore.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, W.; Zhou, W.; Jia, H. Potential of Global Offshore Petroleum Resource Exploration and Utilization Prospect. Nat. Gas. Geosci. 2010, 21, 988–995. [Google Scholar]
- Sun, C.; Liu, Y.; Zhao, S.S.; Song, J. Estimating offshore oil production using DMSP-OLS annual composites. ISPRS J. Photogramm. 2020, 165, 152–171. [Google Scholar] [CrossRef]
- BP. Energy Outlook 2019 Edition. 2019. Available online: https://www.bp.com/content/dam/bp/business-sites/en/global/corporate/pdfs/energy-economics/energy-outlook/bp-energy-outlook-2019.pdf (accessed on 13 December 2020).
- EIA. International Energy Outlook 2018. 2018. Available online: https://www.eia.gov/pressroom/presentations/capuano_07242018.pdf (accessed on 19 November 2019).
- World Bank Database. Available online: https://databank.worldbank.org/home.aspx (accessed on 13 December 2020).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Liu, Y.; Cui, H.Y.; Kuang, Z.; Li, G.Q. Ship detection and classification on optical remote sensing images using deep learning. ITM Web Conf. EDP Sci. 2017, 12, 05012. [Google Scholar] [CrossRef] [Green Version]
- Gallego, A.J.; Pertusa, A.; Gil, P. Automatic Ship Classification from Optical Aerial Images with Convolutional Neural Networks. Remote Sens. 2018, 10, 511. [Google Scholar] [CrossRef] [Green Version]
- Gao, L.; He, Y.; Sun, X.; Jia, X. Incorporating Negative Sample Training for Ship Detection Based on Deep Learning. Sensors 2019, 19, 684. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, G.A.; Wan, Z.A.; Liu, X.A.; Hui, J.B. Ship detection based on squeeze excitation skip-connection path networks for optical remote sensing images. Neurocomputing 2019, 332, 215–223. [Google Scholar] [CrossRef]
- Falqueto, L.E.; Sá, J.A.; Paes, R.L.; Passaro, A. Oil rig recognition using convolutional neural network on Sentinel-1 SAR images. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1329–1333. [Google Scholar] [CrossRef]
- Peng, C.; Wang, J.; Li, D. Oil platform investigation by multi-temporal SAR remote sensing image. In Proceedings of the Conference on SAR Image Analysis, Modeling, and Techniques XI, Prague, Czech Republic, 21–22 September 2011. [Google Scholar]
- Wang, J.; Liu, Y.; Li, M.; Yang, K.; Cheng, L. Drilling platform detection based on ENVISAT ASAR remote sensing data: A case of southeastern Vietnam offshore area. Geogr. Res. 2013, 32, 2143–2152. [Google Scholar]
- Wang, Q.; Zhang, J.; Su, F. Offshore Platform Extraction Using RadarSat-2 SAR Imagery: A Two-Parameter CFAR Method Based on Maximum Entropy. Entropy 2019, 21, 556. [Google Scholar] [CrossRef] [Green Version]
- Cheng, L.; Yang, K.; Tong, L.; Liu, Y.; Li, M. Invariant triangle-based stationary oil platform detection from multitemporal synthetic aperture radar data. J. Appl. Remote Sens. 2013, 7, 073537. [Google Scholar] [CrossRef]
- Wan, J.; Yao, P.; Meng, J. Research on Detection Method of the Offshore Oil Platform Based on SAR Images. Bull. Surv. Map. 2014, 1, 56–59. [Google Scholar]
- Wong, B.A.; Thomas, C.; Halpin, P. Automating offshore infrastructure extractions using synthetic aperture radar & Google Earth Engine. Remote Sens. Environ. 2019, 233, 111–412. [Google Scholar]
- Zhang, J.; Wang, Q.; Su, F. Automatic extraction of offshore platforms in single SAR images based on a dual-step-modified model. Sensors 2019, 19, 231. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meng, R.; Xing, Q. Detection of offshore ship and well platform based on optical remote sensing images. J. Comput. Appl. 2013, 33, 708–711. [Google Scholar] [CrossRef]
- Cheng, W. Research on Extraction of Oil and Gas Drilling Platforms with Remote Sensing in the South China Sea. Master’s Thesis, Nanjing University, Nanjing, China, 2015. [Google Scholar]
- Liu, Y.X.; Sun, C.; Yang, Y.; Zhou, M.; Zhan, W.; Cheng, W. Automatic extraction of offshore platforms using time-series Landsat-8 Operational Land Imager data. Remote Sens. Environ. 2016, 175, 73–91. [Google Scholar] [CrossRef]
- Zhao, S.; Sun, C.; Wang, H.; Cheng, W. Extraction and Monitoring of Offshore Oil and Gas Platforms Based on Landsat Imagery. Trop. Geogr. 2017, 37, 112–119. [Google Scholar]
- Li, Q. Oil and Gas Platforms Detection and Oil and Gas Resources Security Situation Evaluate Based on Multi-Source Data in the South China Sea. Master’s Thesis, Lanzhou Jiaotong University, Lanzhou, China, 2016. [Google Scholar]
- Sun, C. Dynamic Monitoring of Oil/Gas Development in the South China Sea Based on Long-Period Time-Serious and Multi-Source Remote Sensing Image. Ph.D. Thesis, Nanjing University, Nanjing, China, 2018. [Google Scholar]
- Fan, Y.; Wang, Q. A Connected Component Based Offshore Platforms Extraction Method of GF2 Multi-channel Optical Images. In Proceedings of the 2019 IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 19–21 July 2019; IEEE: New York, NY, USA, 2019; pp. 916–919. [Google Scholar]
- Zhu, Z.; Tang, Y.; Han, T. Offshore Platform Detection Based on Harris Detector and Intensity-Texture Image from Sentinel_2A Image. In Proceedings of the 2018 10th IAPR Workshop on Pattern Recognition in Remote Sensing (PRRS), Beijing, China, 19–20 August 2018; IEEE: New York, NY, USA, 2018; pp. 1–4. [Google Scholar]
- Croft, T.A. Nighttime images of the earth from space. Sci. Am. 1978, 239, 86–101. [Google Scholar] [CrossRef]
- Stroppiana, D.; Pinnock, S.; Gregoire, J.M. The Global Fire Product: Daily fire occurrence from April 1992 to December1993 derived from NOAA AVHRR data. Int. J. Remote Sens. 2010, 21, 1279–1288. [Google Scholar] [CrossRef]
- Chowdhury, S.; Shipman, T.; Chao, D.; Elvidge, C.D.; Zhizhin, M.; Hsu, F.C. Daytime Gas Flare Detection Using Landsat-8 Multispectral Data. In Proceedings of the IEEE Joint International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Casadio, S.; Arino, O.; Minchella, A. Use of ATSR and SAR measurements for the monitoring and characterisation of night-time gas flaring from offshore platforms: The North Sea test case. Remote Sens. Environ. 2012, 123, 175–186. [Google Scholar] [CrossRef]
- Anejionu, O.C.D.; Blackburn, G.A.; Whyatt, J.D. Detecting gas flares and estimating flaring volumes at individual flow stations using MODIS data. Remote Sens. Environ. 2015, 158, 81–94. [Google Scholar] [CrossRef] [Green Version]
- Elvidge, C.D.; Ziskin, D.; Baugh, K.E.; Tuttle, B.T.; Ghosh, T.; Pack, D.W.; Erwin, E.H.; Zhizhin, M. A Fifteen Year Record of Global Natural Gas Flaring Derived from Satellite Data. Energies 2009, 2, 595–622. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Zhizhin, M.; Hsu, F.C.; Baugh, K.E. VIIRS Nightfire: Satellite Pyrometry at Night. Remote Sens. 2013, 5, 4423–4449. [Google Scholar] [CrossRef] [Green Version]
- Elvidge, C.D.; Zhizhin, M.; Baugh, K.; Hsu, F.C.; Ghosh, T. Methods for Global Survey of Natural Gas Flaring from Visible Infrared Imaging Radiometer Suite Data. Energies 2016, 9, 14. [Google Scholar] [CrossRef]
- Hu, R.; Jiang, F.; Wang, Y.; Li, J.; Li, Y.; Abdimijit, A.; Luo, G.; Zhang, J. Arid Ecological and Geographical Conditions in Five Countries of Central Asia. Arid Zone Res. 2014, 31, 1–12. [Google Scholar]
- EIA. Caspian Sea Region. Available online: https://www.eia.gov/international/content/analysis/regions_of_interest/Caspian_Sea/caspian_sea.pdf (accessed on 23 August 2013).
- Liu, Y.X.; Hu, C.M.; Sun, C.; Zhan, W.F.; Sun, S.J.; Xu, B.H.; Dong, Y.Z. Assessment of offshore oil/gas platform status in the northern Gulf of Mexico using multi-source satellite time-series images. Remote Sens. Environ. 2018, 208, 63–81. [Google Scholar] [CrossRef]
- Lee, D.S.; Storey, J.C.; Choate, M.J.; Hayes, R.W. Four years of Landsat-7 on-orbit geometric calibration and performance. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2786–2795. [Google Scholar] [CrossRef]
- Morel, A.C.; Fisher, J.B.; Malhi, Y. Evaluating the potential to monitor aboveground biomass in forest and oil palm in Sabah, Malaysia, for 2000–2008 with Landsat ETM+ and ALOS-PALSAR. Int. J. Remote Sens. 2012, 33, 3614–3639. [Google Scholar] [CrossRef]
- Nooni, I.K.; Duker, A.A.; Van Duren, I.; Addae-Wireko, L.; Osei Jnr, E.M. Support vector machine to map oil palm in a heterogeneous environment. Int. J. Remote Sens. 2014, 35, 4778–4794. [Google Scholar] [CrossRef]
- Zhang, Q.L.; Li, B.; Thau, D.; Moore, R. Building a Better Urban Picture: Combining Day and Night Remote Sensing Imagery. Remote Sens. 2015, 7, 11887–11913. [Google Scholar] [CrossRef] [Green Version]
- GEE. Landsat Collections. Available online: https://developers.google.com/earth-engine/datasets/catalog/landsat-7 (accessed on 27 December 2019).
- National Oceanic and Atmospheric Administration (NOAA). Available online: https://www.ngdc.noaa.gov/eog/viirs/download_dnb_composites.html (accessed on 2 February 2020).
- GEE. Sentinel Collections. Available online: https://developers.google.com/earth-engine/datasets/catalog/sentinel-2 (accessed on 23 November 2019).
- Markham, B.L.; Storey, J.C.; Williams, D.L.; Irons, J.R. Landsat sensor performance: History and current status. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2691–2694. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.X.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4-7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Lu, S.L.; Wu, B.F.; Yan, N.N.; Wang, H. Water body mapping method with HJ-1 A/B satellite imagery. Int. J. Appl. Earth Obs. 2011, 13, 428–434. [Google Scholar] [CrossRef]
- Xu, H.Q. A Study on Information Extraction of Water Body with the Modified Normalized Difference Water Index (MNDWI). J. Remote Sens. 2005, 9, 589–595. [Google Scholar]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Ju, J.; Roy, D.P. The availability of cloud-free Landsat ETM plus data over the conterminous United States and globally. Remote Sens. Environ. 2008, 112, 1196–1211. [Google Scholar] [CrossRef]
- Wei, J.; Huang, W.; Li, Z.; Sun, L.; Zhu, X.; Yuan, Q.; Liu, L.; Cribb, M. Cloud detection for Landsat imagery by combining the random forest and superpixels extracted via energy-driven sampling segmentation approaches. Remote Sens. Environ. 2020, 248, 112005. [Google Scholar] [CrossRef]
- Candra, D.S.; Phinn, S.; Scarth, P. Cloud and cloud shadow masking for Sentinel-2 using multitemporal images in global area. Int. J. Remote Sens. 2020, 41, 2877–2904. [Google Scholar] [CrossRef]
- Holben, B.N. Characteristics of Maximum-Value Composite Images from Temporal Avhrr Data. Int. J. Remote Sens. 1986, 7, 1417–1434. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | Crude Oil and Lease Condensate (Billion Barrels) | Natural Gas (Billion Cubic Feet) |
|---|---|---|
| Azerbaijan | 8.5 | 51 |
| The Caspian offshore parts | 6.8 | 46 |
| The Land parts | 1.7 | 5 |
| Iran | 0.5 | 2 |
| The Caspian offshore parts | 0.5 | 1 |
| The Land parts | (s) | 1 |
| Kazakhstan | 31.2 | 104 |
| The Caspian offshore parts | 15.7 | 36 |
| The Land parts | 15.5 | 68 |
| Russia | 6.1 | 109 |
| The Caspian offshore parts | 1.6 | 14 |
| The Land parts | 4.5 | 95 |
| Turkmenistan | 1.9 | 19 |
| The Caspian offshore parts | 1.1 | 9 |
| The Land parts | 0.8 | 10 |
| Uzbekistan | (s) | 7 |
| The Caspian offshore parts | 0 | 0 |
| The Land parts | (s) | 7 |
| The Caspian basin | 48.2 | 292 |
| The Caspian offshore parts | 19.6 | 106 |
| The Land parts | 28.6 | 186 |
| Data Set | Data Name | Spatial Resolution | Data Source |
|---|---|---|---|
| Landsat data | Landsat-7/ETM+ | 30 m | GEE [42] |
| Night-light data | VIIRS/DNB | About 500 m | NOAA [43] |
| High-resolution data | Sentinel-2 MSI | 10 m | GEE [44] |
| DigitalGlobe imagery | / | Google Earth |
| Ground object | NDWI | Cloud Effect | Shadow Effect | Optimal NDWI |
|---|---|---|---|---|
| Water | High |  | | Maximum NDWI |
| Bare land | Low (negative) |  | | Minimum NDWI |
| Offshore drilling rigs | Between water and bare land |  | | Mean NDWI |
| Platform Type | Remote Sensing Image | Related Images |
|---|---|---|
| Single offshore drilling rig |  |  |
| Large offshore drilling rig group |  |  |
| Artificial island of offshore drilling rig |  |  |
| Verification Image | Visual Interpretation | Successfully Identified | Missed | False Identification | Accuracy (%) |
|---|---|---|---|---|---|
| Google Earth | 248 | 238 | 23 | 23 | 90.2% |
| Sentinel-2 | 265 | 259 | 6 | 2 | |
| Total | 513 | 497 | 29 | 25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Jia, G.; Zhang, Q.; Zhang, S.; Lin, X.; Shuai, Y. Detecting Offshore Drilling Rigs with Multitemporal NDWI: A Case Study in the Caspian Sea. Remote Sens. 2021, 13, 1576. https://doi.org/10.3390/rs13081576
Zhu H, Jia G, Zhang Q, Zhang S, Lin X, Shuai Y. Detecting Offshore Drilling Rigs with Multitemporal NDWI: A Case Study in the Caspian Sea. Remote Sensing. 2021; 13(8):1576. https://doi.org/10.3390/rs13081576
Chicago/Turabian StyleZhu, Hui, Gongxu Jia, Qingling Zhang, Shan Zhang, Xiaoli Lin, and Yanmin Shuai. 2021. "Detecting Offshore Drilling Rigs with Multitemporal NDWI: A Case Study in the Caspian Sea" Remote Sensing 13, no. 8: 1576. https://doi.org/10.3390/rs13081576
APA StyleZhu, H., Jia, G., Zhang, Q., Zhang, S., Lin, X., & Shuai, Y. (2021). Detecting Offshore Drilling Rigs with Multitemporal NDWI: A Case Study in the Caspian Sea. Remote Sensing, 13(8), 1576. https://doi.org/10.3390/rs13081576