1. Introduction
Haiyang-2D (HY-2D) is the fourth marine dynamic environment satellite in China. It was successfully launched on 19 May 2021, and the data receiving plan was implemented at the National Satellite Ocean Application Service (NSOAS) on 25 May 2021; the receiving system condition is good, the antenna tracking is normal, and the quality of data is good. The ground receiving system is in the normal task receiving stage. HY-2D, HY-2B, and HY-2C form a large-scale global marine dynamic environment monitoring system that provides accurate marine dynamic environment information for early warning of marine disasters, sustainable development of marine resources, effective response to global climate change, and marine scientific research [
1]. HY-2D adopts an orbit with a regression period of 10 days in the early stage and will changes to an orbit with a regression period of 400 days in the later stage. HY-2D is equipped with a laser reflector array (LRA), a satellite-borne Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS) receiver, and a satellite-borne dual-frequency GPS receiver named HY2 that was independently developed in China.
Due to the high speed and low orbit of low-Earth-orbit (LEO) satellites, observations of LEO satellites by ground tracking stations have the shortcomings of short continuous periods and unsustainable observation [
2]. Therefore, one station has fewer observations of SLR and DORIS than that of GPS for LEO satellites. The DORIS system was successfully developed by the National Centre for Space Studies (CNES) and other institutions after nearly 10 years of hard work. It can provide high-precision orbital products in the full arc and is mainly used for precise satellite orbit determination and precise point positioning. DORIS observation has the advantages of a short time frame, all-weather operation, more data, and an even distribution of beacon stations. The satellite-borne GPS data have the characteristics of high accuracy, round-the-clock coverage, and continuity. Since Bertiger et al., (1994) successfully applied the satellite-borne GPS receiver on the TOPEX/Poseidon satellite in 1992 [
3], the satellite-borne GPS receiver has been installed on several LEO satellites and become a common technique for LEO satellite orbit determination [
4,
5,
6,
7,
8].
At present, satellite-borne GPS data are used in precise orbit determination (POD) for Jason [
9], SWARM [
10], GOCE [
11], GRACE [
12], and CHAMP, and the GPS POD technique has achieved high-precision orbit results. Accuracy evaluation of orbits is an important task of LEO POD. The commonly used methods are mainly divided into internal validations and external validations. The internal validations mainly include carrier-phase residuals and overlapping orbit validation. The external validation mainly includes comparison with other technical orbit determination results and SLR range validation. The external methods to validate the accuracy of orbits are more conducive to proving the reliability of the results of LEO POD, but the orbits determined by other techniques are sometimes not obtained in time. In addition, the traditional SLR range validation is also constrained to the number of normal points (NP), and shortcomings of the validation method include failure to clearly show the accuracy of orbits in three-dimensions. Deficiencies in these external validation methods prevent the determined accuracy of satellite orbits from being fully validated on time, affecting the use of altimetry data. Formation satellites such as GRACE and GRACE-FO, K-band ranging (KBR) can be used to validate the accuracy of orbits. It is necessary to perform calculations using the orbit determination results to obtain the relative distance and speed between satellites, and then compare them with the KBR data to evaluate the relative orbit accuracy of the satellites [
13,
14,
15]. Guo et al., (2021) proposed verifying the accuracy of the reduced-dynamics (RD) orbits with onboard DORIS data [
16].
The quality of satellite data and the orbit determination strategies are the main factors affecting the POD accuracy [
17], and the data quality can also be used to evaluate the performance of the receiver [
18]. Hwang et al., (2010) analyzed the data quality of COSMIC and GRACE regarding the multipath effect, ionospheric delay, cycle slip, etc., then evaluated the performance differences of different receivers. The results proved that high-quality observations are the premise of high-precision orbit determination [
19]. Gong et al., (2020) proposed the progressive method to determine orbits without estimating the orbit parameters directly, which reduces the error of matrixes and obtains more reliable orbits [
20].
The main aim of this paper is to evaluate the performance of the HY2 receiver and the accuracy of the HY-2D RD orbit. Based on the satellite-borne GPS observations, precise ephemeris, and SLR data, three orbit accuracy assessment methods are proposed to evaluate the accuracy of HY-2D RD orbit: carrier differential validation, inter-satellite differential validation, and SLR three-dimensional (3D) validation. In
Section 2, the principle and derivation of three methods of orbit accuracy evaluation are introduced in detail. In
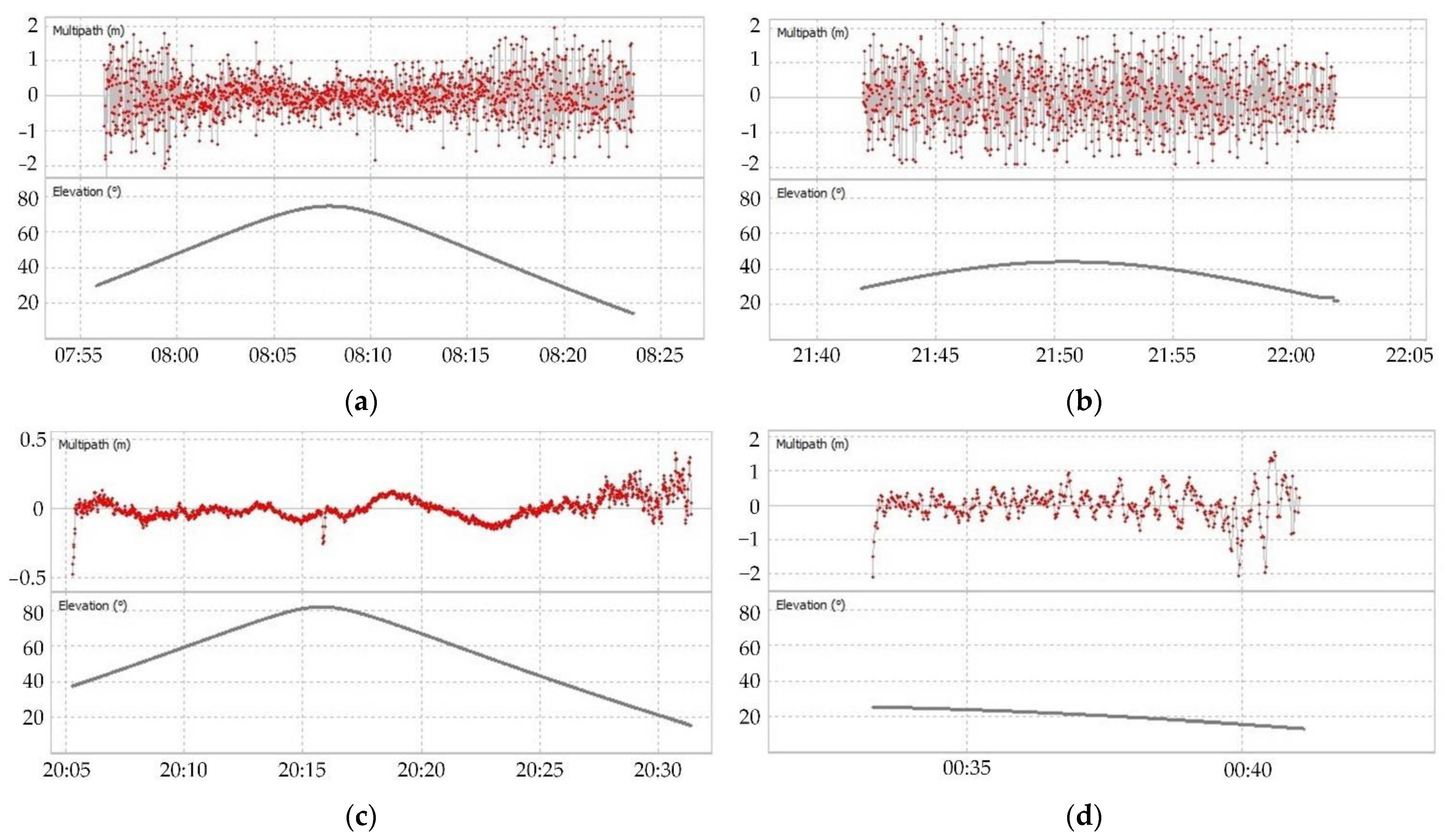
Section 3, the data quality of HY-2D collected by the satellite-borne GPS receiver is analyzed with TEQC software regarding the multipath error, cycle slips, and data completeness [
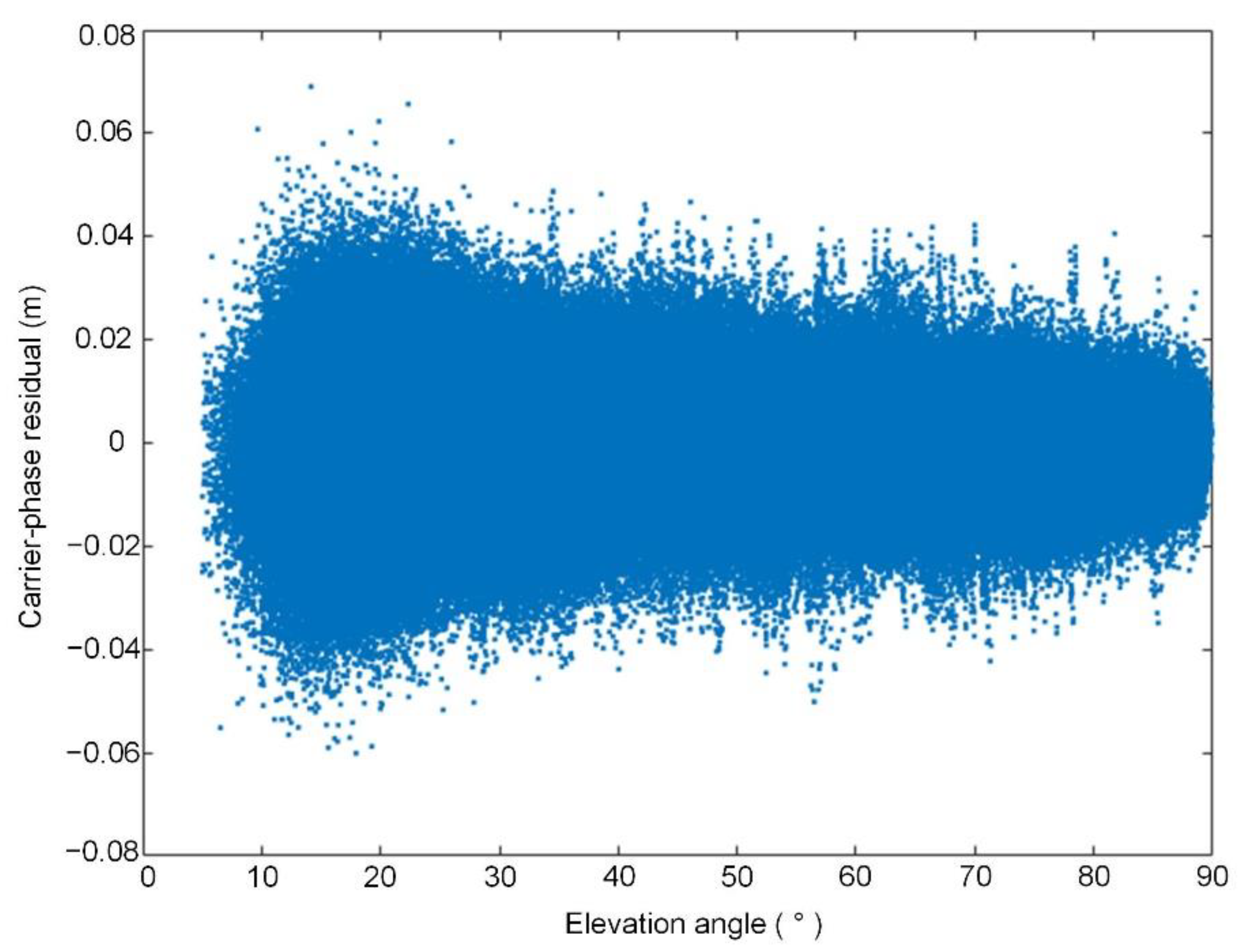
21]. The orbit determination strategies are analyzed, and the RD method [
22] is used to determine the precise orbits of HY-2D. Carrier-phase residuals are used to evaluate the internal accuracy of POD, and SLR range validation and DORIS validation are used to evaluate the external accuracy. The carrier differential validation, inter-satellite differential validation and SLR 3D validation proposed in this paper are used to evaluate the accuracy of POD, and the reliability of the three methods is verified. Finally, the conclusions are presented.
2. Methods
Assessment of POD accuracy is mainly divided into two categories. The internal validation methods only use some data during POD to check the orbit determination results, such as carrier-phase residuals and overlapping orbit validation. The external validation uses data that were not participated in the orbit determination to check the satellite POD, such as comparing with orbits determined by other techniques and SLR range validation [
23]. However, in the absence of other technical orbit determination results, there is only one external method to validate the POD, and the SLR range validation can only show the distance difference and cannot evaluate the POD accuracy in x, y, and z directions.
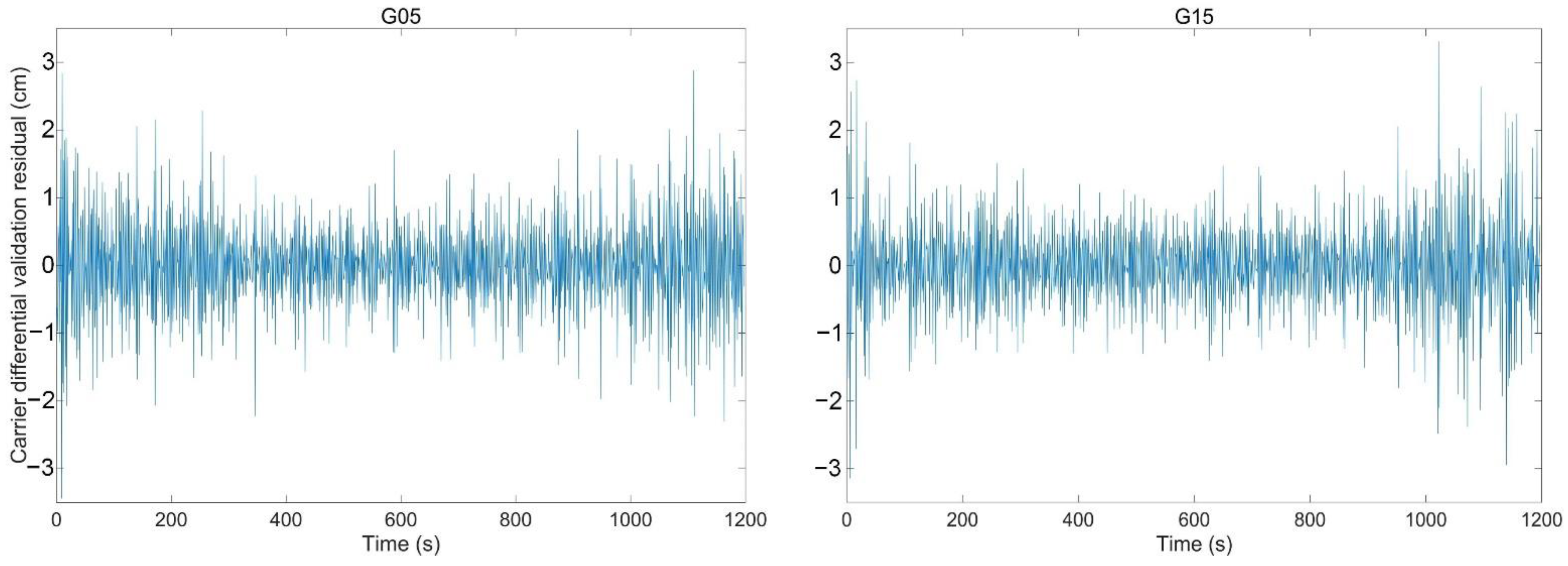
In this paper, three methods are proposed for the external validation of POD: carrier differential validation, inter-satellite differential validation, and SLR 3D validation. The carrier differential validation uses the carrier-phase data of one GPS satellite and inter-satellite differential validation uses the carrier-phase data of two GPS satellites out of all viewed GPS satellites. Since the selected GPS data were not participated in the orbit determination, they can be regarded as external data to achieve validations of orbits accuracy. The SLR 3D validation can evaluate errors in the x, y, and z directions of the POD, making the results more intuitive. Since none of the data used for the validation has been participating in the orbit determination, these three methods are considered external validation.
The carrier differential validation and inter-satellite differential validation use the GPS carrier-phase data to evaluate POD. Errors caused by the ionospheric delay error, satellite clock bias, receiver clock bias, integer ambiguity, and other factors must be considered if the carrier-phase data are used to validate the accuracy of POD without any processing of difference. While the double-difference method can eliminate the effects of these errors on the carrier, it is a good idea to use the method.
2.1. Carrier Differential Validation Method
The carrier differential validation is a comparison between the distance obtained by using carrier-phase data of adjacent epochs and the distance calculated by coordinates of the GPS satellite and the coordinates of LEO; the orbits of LEO are determined by the RD method. The influence of errors is then eliminated through making difference to obtain the residuals of validation.
HY2 is a dual-frequency receiver, and satellite-borne GPS observations of HY-2D include two frequency carriers (
and
) [
24,
25,
26], so the linear combination method is used to obtain the Ionosphere-Free combination [
27] observation as:
where
and
are the frequencies of
and
, respectively;
and
are the carrier-phase observations of the two frequencies;
is the Ionosphere-Free combination observation.
The carrier-phase observations corresponding to the two frequencies at epoch
are
and
, respectively, and
is the speed of light. The linear combination (
) of phase data is [
27]:
where
is the
observation at epoch
,
and
are the carrier-phase observations of the two frequencies at epoch
.
The difference between the
observations in the two adjacent epochs is found to obtain the carrier distance difference
:
where
is the
observation at epoch
, and
is the
observation at epoch
.
The geometrical distance
between the HY-2D orbit and the GPS satellite orbit can be calculated as:
where
,
,
represent the position of HY-2D obtained by POD,
,
,
represent the position of the GPS satellite, and
is the geometrical distance.
The difference of geometrical distances between two adjacent epochs:
where
is the geometrical distance at epoch
, and
is the geometrical distance at epoch
.
The difference between two adjacent epochs is found by using the carrier-phase distance difference and geometrical distance difference, that is, Equation (3) minus Equation (5):
Equation (6) is used to calculate
and
of two adjacent epochs and find the difference again:
The residuals can be obtained, and the effect of errors such as satellite clock bias and ambiguity are eliminated.
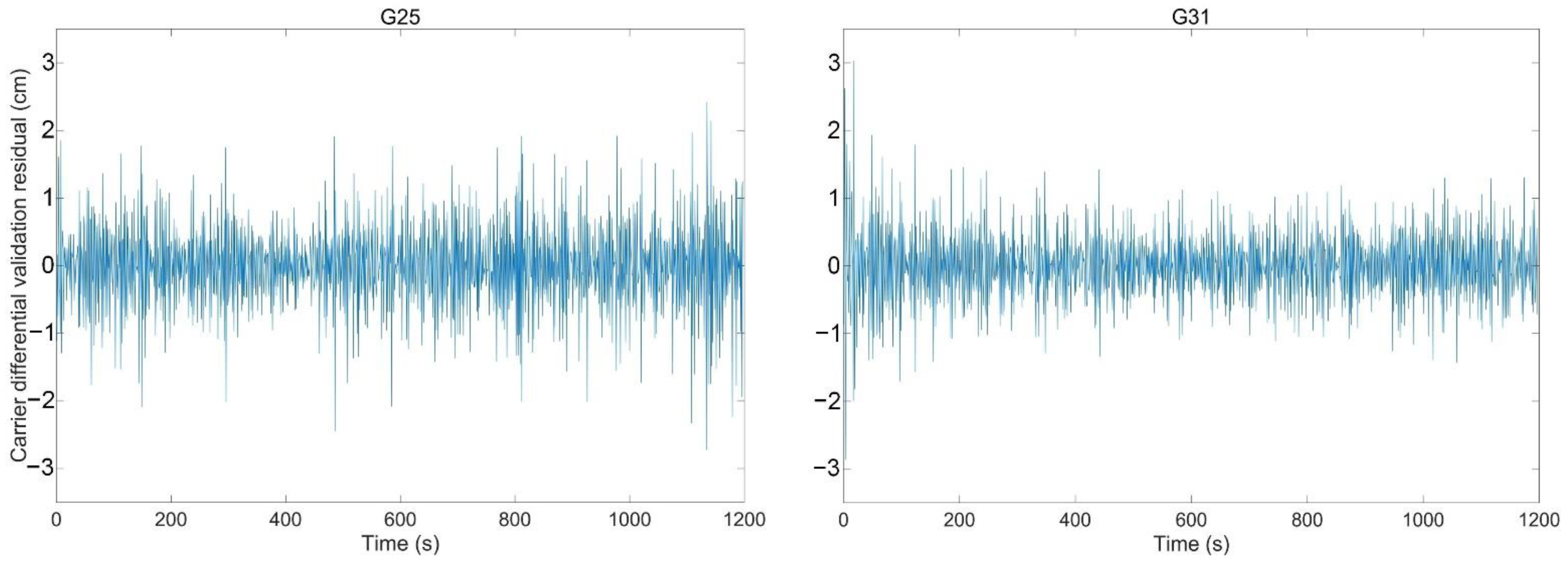
The core idea of carrier differential validation is that the carrier distance variation and geometrical distance variation between one GPS satellite that is not participating in LEO POD and the LEO satellite at adjacent epochs should be the same in theory. The influence of other errors is eliminated by finding the difference, and the residuals are obtained as a result of the orbital accuracy validation.
2.2. Inter-Satellite Differential Validation Method
The inter-satellite differential validation is a method that uses carrier-phase data of two GPS satellites that are not participating in LEO POD and the precise ephemeris of GPS to calculate the difference between the carrier-phase distances of the adjacent epochs of the two satellites. The orbit determined of LEO and the precise ephemeris of GPS are then used to calculate the geometrical distance between the HY-2D and the GPS satellite to obtain the difference between the carrier-phase distance and the geometrical distance. Finally, the result is differentiated to eliminate the influence of other errors and determine the validation residuals.
Equation (2) is used to obtain Ionosphere-Free combination observations for carrier-phase data, and the carrier distance after eliminating the influence of the ionosphere is .
The difference between the carrier-phase distance of GPS satellite
and that of GPS satellite
at the same epoch:
where
represents the carrier-phase distance between GPS
and HY-2D, and
represents the carrier-phase distance between GPS
and HY-2D;
is the difference of carrier-phase distance between GPS
and GPS
. The geometrical distances
and
are calculated using the coordinates of GPS and the coordinates of HY-2D. The difference is found to obtain
:
where
represents the geometrical distance between GPS
and HY-2D, and
represents the geometrical distance between GPS
and HY-2D. The carrier-phase distance difference and geometrical distance difference between the two GPS satellites and HY-2D are made differences to obtain the residual
:
Since the two GPS satellites that participate in the validations are moving in different directions and at different speeds, the
values of the adjacent epochs are differenced to obtain the final residual
:
The core idea of inter-satellite differential validation is to use the carrier-phase data of two GPS satellites to calculate the relative variations between the two satellites and HY-2D in adjacent epochs and compare them with the relative geometrical distance variations calculated using the coordinates. Therefore, when selecting data for experiments, it is necessary to ensure that two GPS satellites can be observed simultaneously and continuously during this period.
2.3. SLR 3D Validation Method
Since SLR range validation can only determine the residuals of the validation in distance and the results are not very intuitive, we propose an SLR 3D validation method on SLR range validation. SLR 3D validation is a method that uses data about SLR stations and the results of SLR range validation to validate the accuracy of orbits. It uses the coordinates of SLR stations provided by the International Laser Ranging Service (
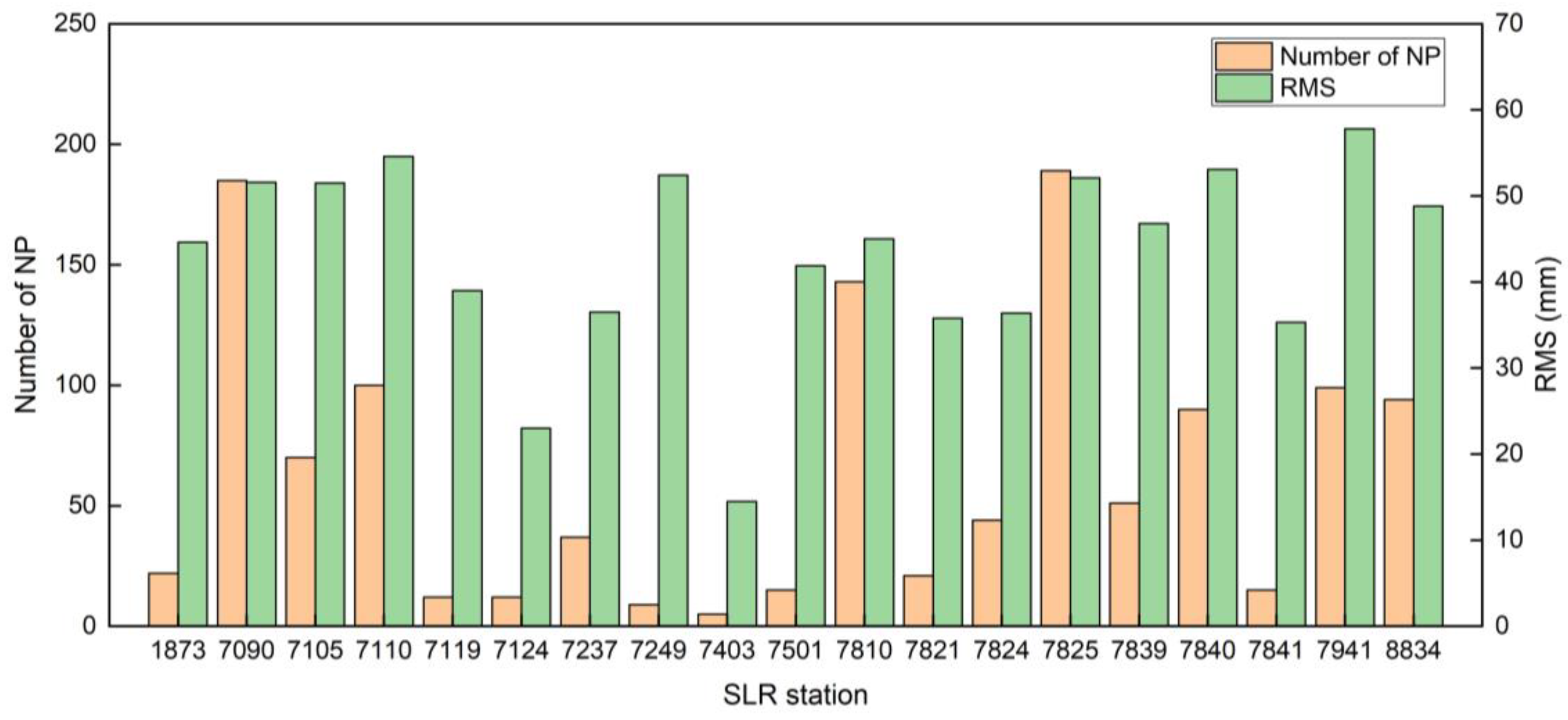
https://ilrs.gsfc.nasa.gov/) (accessed on 15 March 2022) (ILRS) and RD orbits of LEO to calculate the geometrical distances from the stations to LEO. Then, make differences between geometrical distances and distances obtained by laser ranging, and the root mean square (RMS) of the results are propagated to three directions according to the law of error propagation, and intuitive results of the validation are obtained.
The latest coordinates of SLR stations (SLRF2014) were downloaded from the ILRS [
28], and the coordinates of stations in September 2021 were calculated based on the initial coordinates and the change rate of coordinates provided by SLRF2014. The residuals of distance were obtained according to the principle of laser ranging:
where SLR is the laser ranging distance and
is the geometrical distance calculated between the SLR station and HY-2D. According to the law of error propagation, the error is transmitted to x, y, and z directions:
where
is the RMS of the SLR range validation;
is the RMS error of the accuracy of range data of the SLR station;
,
, and
are the coordinate differences between the SLR station and the HY-2D satellite in the x, y, and z coordinates during the continuous observation period;
,
, and
represent the accuracy of the coordinates of SLR stations in three directions;
,
, and
are the errors in the results of the validation of orbits in three directions.
The SLR 3D validation method is an improved method based on the SLR range validation method. The new method can express the accuracy of an orbit in the three directions of x, y, and z, making the results more intuitive.
4. Conclusions
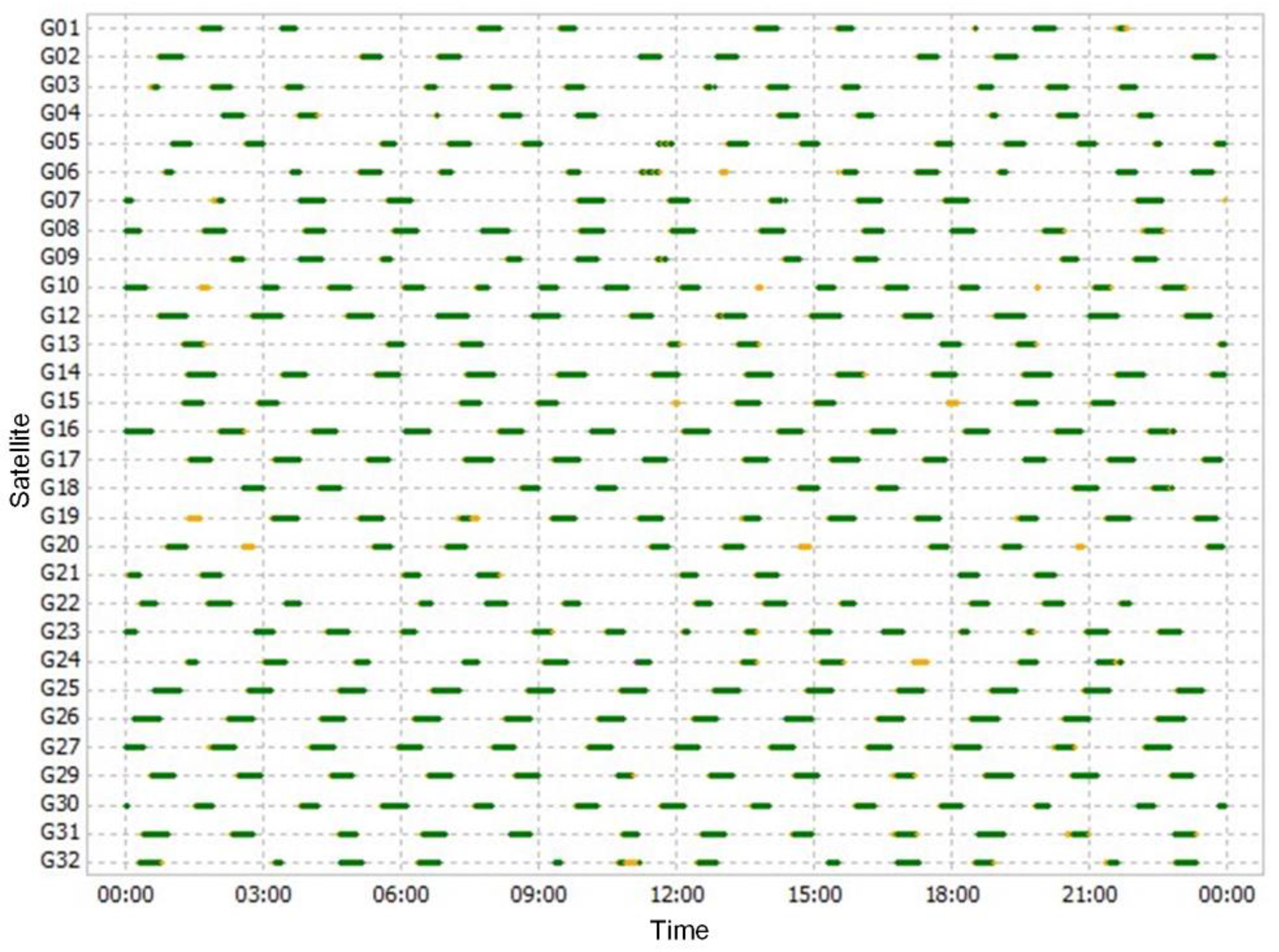
In this paper, the quality of HY-2D satellite-borne GPS data was analyzed, and the receiver was able to observe six or more navigation satellites more than 78.6% of the time. Compared with the frequency data, the variation in elevation angle had a greater impact on the frequency carrier-phase observations. The elevation angles were consistently below 40° for some of the observations, resulting in a large multipath error and severe fluctuations. The multipath effect, data integrity rate, and cycle slips proved that the HY2 receiver independently developed in China had a good performance and stable operation. Three external methods including carrier differential validation, inter-satellite differential validation, and SLR 3D validation were proposed, and the feasibility of these methods was verified based on the RD orbit of HY-2D. The orbits of HY-2D were precisely determined using the RD method; the carrier-phase residual was used as the internal validation method, and the residual RMS value was 0.0078 m. The DORIS validation and SLR range validation were used as the external validation methods with RMS values of 0.0085 m/s and 0.0495 m, respectively. The proposed SLR 3D validation based on the SLR range validation obtained errors in the x, y, and z directions, and the RMS values were 0.0266, 0.0332, and 0.0269 m, respectively. The results were comparable to the accuracy of SLR range validation but more intuitive. The proposed carrier differential validation and inter-satellite differential validation were mainly carried out using satellite carrier-phase data that was not used in POD. One or two GPS satellites were selected from the satellite-borne GPS data for external validation, and the remaining observations of GPS satellites were used for POD. The RMS values of the carrier differential validation and inter-satellite differential validation were 0.0068 and 0.0106 m, respectively. Experimental results demonstrated that the three proposed methods can be used as external validation methods and that they are reliable.



 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}