
Shifts in Salt Marsh Vegetation Landcover after Debris Flow Deposition



Abstract
:
1. Introduction
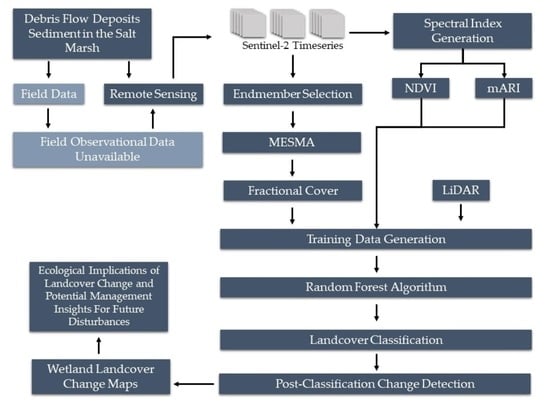
2. Materials and Methods
2.1. Event and Site Description
2.2. Data Description and Correction
2.3. Spectral Analysis
2.4. Random Forest and Change Detection
3. Results
3.1. Random Forest
3.2. Post-Classification Change Detection
4. Discussion
4.1. Model Accuracy
4.2. Landcover Change and Ecological Implications
4.3. Limitations and Challenges
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gibbs, J.P. Wetland Loss and Biodiversity Conservation. Conserv. Biol. 2000, 14, 314–317. [Google Scholar] [CrossRef]
- Callaway, J.C.; Borgnis, E.L.; Turner, R.E.; Milan, C.S. Carbon Sequestration and Sediment Accretion in San Francisco Bay Tidal Wetlands. Estuaries Coast 2012, 35, 1163–1181. [Google Scholar] [CrossRef]
- California Department of Fish and Wildlife. Coastal Wetlands-Emergent Marshes. California’s Living Marine Resources: A Status Report. 2001. Available online: https://nrm.dfg.ca.gov/FileHandler.ashx?DocumentID=34250 (accessed on 16 May 2021).
- Uhrin, A.V.; Schellinger, J. Marine Debris Impacts to a Tidal Fringing-Marsh in North Carolina. Mar. Pollut. Bull. 2011, 62, 2605–2610. [Google Scholar] [CrossRef] [PubMed]
- Tweel, A.W.; Turner, R.E. Landscape-Scale Analysis of Wetland Sediment Deposition from Four Tropical Cyclone Events. PLoS ONE 2012, 7, e50528. [Google Scholar] [CrossRef] [PubMed]
- Doughty, C.L.; Cavanaugh, K.C. Mapping Coastal Wetland Biomass from High Resolution Unmanned Aerial Vehicle (UAV) Imagery. Remote Sens. 2019, 11, 540. [Google Scholar] [CrossRef]
- Erwin, K. Wetlands and Global Climate Change: The Role of Wetland Restoration in a Changing World. Wetl. Ecol. Manag. 2009, 17, 71–84. [Google Scholar] [CrossRef]
- Beland, M.; Biggs, T.; Roberts, D.; Peterson, S.; Koklay, R.; Piazza, S. Oiling Accelerates Loss of Salt Marshes, Southeastern Louisiana. PLoS ONE 2017, 12, e0181197. [Google Scholar] [CrossRef]
- Klemas, V. Remote Sensing of Coastal Wetland Biomass: An Overview. J. Coast. Res. 2013, 29, 1016–1028. [Google Scholar] [CrossRef]
- Klemas, V. Remote Sensing of Emergent and Submerged Wetlands: An Overview. Int. J. Remote Sens. 2013, 34, 6286–6320. [Google Scholar] [CrossRef]
- Peterson, S.H.; Roberts, D.A.; Beland, M.; Kokaly, R.F.; Ustin, S.L. Oil Detection in the Coastal Marshes of Louisiana Using MESMA Applied to Band Subsets of AVIRIS. Remote Sens. Environ. 2015, 159, 222–231. [Google Scholar] [CrossRef]
- Rosso, P.H.; Ustin, S.L.; Hastings, A. Mapping Marshland Vegetation of San Francisco Bay, California, Using Hyperspectral Data. Int. J. Remote Sens. 2005, 26, 5169–5191. [Google Scholar] [CrossRef]
- Eastwood, J.A.; Yates, M.G.; Thomson, A.G.; Fuller, R.M. The Reliability of Vegetation Indices for Monitoring Saltmarsh Vegetation Cover. Int. J. Remote Sens. 1997, 18, 3901–3907. [Google Scholar] [CrossRef]
- Parihar, S.M.; Sarkar, S.; Dutta, A.; Sharma, S.; Dutta, T. Characterizing Wetland Dynamics: A Post-Classification Change Detection Analysis of the East Kolkata Wetlands Using Open Source Satellite Data. Geocarto Int. 2013, 28, 273–287. [Google Scholar] [CrossRef]
- Miller, G.J.; Morris, J.T.; Wang, C. Estimating Aboveground Biomass and Its Spatial Distribution in Coastal Wetlands Utilizing Planet Multispectral Imagery. Remote Sens. 2019, 11, 2020. [Google Scholar] [CrossRef]
- Nasser Mohamed Eid, A.; Olatubara, C.O.; Ewemoje, T.A.; Farouk, H.; Talaat El-Hennawy, M. Coastal Wetland Vegetation Features and Digital Change Detection Mapping based on Remotely Sensed Imagery: El-Burullus Lake, Egypt. Int. Soil Water Conserv. Res. 2020, 8, 66–79. [Google Scholar] [CrossRef]
- Wu, L.; Li, Z.; Liu, X.; Zhu, L.; Tang, Y.; Zhang, B.; Xu, B.; Liu, M.; Meng, Y.; Liu, B. Multi-Type Forest Change Detection Using BFAST and Monthly Landsat Time Series for Monitoring Spatiotemporal Dynamics of Forests in Subtropical Wetland. Remote Sens. 2020, 12, 341. [Google Scholar] [CrossRef]
- Roberts, D.A.; Gardner, M.; Church, R.; Ustin, S.; Scheer, G.; Green, R.O. Mapping Chaparral in the Santa Monica Mountains Using Multiple Endmember Spectral Mixture Models. Remote Sens. Environ. 1998, 65, 267–279. [Google Scholar] [CrossRef]
- Tuxen, K.; Schile, L.; Kelly, M.; Siegel, S. Vegetation Colonization in a Restoring Tidal Marsh: A Remote Sensing Approach. Restor. Ecol. 2008, 16, 313–323. [Google Scholar] [CrossRef]
- Im, J.; Jensen, J.R.; Hodgson, M. Object-Based Land Cover Classification Using High-Posting-Density LiDAR Data. GISci. Remote Sens. 2008, 45, 209–228. [Google Scholar] [CrossRef]
- Andone, D. The Largest Wildfire in California’s Modern History is Finally Out, More Than 6 Months After It Started. CNN. Cable News Network. 2018. Available online: https://www.cnn.com/2018/06/02/us/thomas-fire-officially-out/index.html (accessed on 16 May 2021).
- Kean, J.W.; Staley, D.M.; Lancaster, J.T.; Rengers, F.K.; Swanson, B.J.; Coe, J.A.; Hernandez, J.L.; Sigman, A.J.; Allstadt, K.E.; Lindsay, D.N. Inundation, Flow Dynamics, and Damage in the 9 January 2018 Montecito Debris-Flow Event, California, USA: Opportunities and Challenges for Post-Wildfire Risk Assessment. Geosphere 2019, 15, 1140–1163. [Google Scholar] [CrossRef]
- Myers, M.R.; Cayan, D.R.; Iacobellis, S.F.; Melack, J.M.; Beighley, R.E.; Barnard, P.L.; Dugan, J.E.; Page, H.M. Santa Barbara Area Coastal Ecosystem Vulnerability Assessment. CASG-17-009 2017. California. Available online: https://caseagrant.ucsd.edu/sites/default/files/SBA-CEVA-final-0917.pdf (accessed on 13 January 2021).
- Brooks, A.; (University of California, Santa Barbara, Santa Barbara, CA, USA). Personal communication, 2019.
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- European Space Agency. Overview—Sentinel Online. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-2/overview (accessed on 16 May 2021).
- U.S. Geological Survey. Earth Explorer. Geological Survey (U.S.) FS 083-00. 2000. Available online: https://earthexplorer.usgs.gov/ (accessed on 15 November 2020).
- SNAP—ESA Sentinel Application Platform v8.0. Available online: https://step.esa.int (accessed on 15 November 2020).
- Harris Geospatial. Exelis Visual Information Solutions; Harris Geospatial: Boulder, CO, USA, 2013; Available online: https://www.l3harrisgeospatial.com/ (accessed on 15 November 2020).
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2. Proc. SPIE 2017, 10427, 1042704. [Google Scholar] [CrossRef]
- Federal Emergency Management Agency. Montecito Debris Flow LiDAR; Federal Emergency Management Agency: San Francisco, CA, USA, 2018.
- Streutker, D.R.; Glenn, N.F. LiDAR Measurement of Sagebrush Steppe Vegetation Heights. Remote Sens. Environ. 2006, 102, 135–145. [Google Scholar] [CrossRef]
- Dennison, P.E.; Roberts, D.A. Endmember Selection for Multiple Endmember Spectral Mixture Analysis using Endmember Average RSME. Remote Sens. Environ. 2003, 87, 123–135. [Google Scholar] [CrossRef]
- Dennison, P.E.; Halligan, K.Q.; Roberts, D.A. A Comparison of Error Metrics and Constraints for Multiple Endmember Spectral Mixture Analysis and Spectral Angle Mapper. Remote Sens. Environ. 2004, 93, 359–367. [Google Scholar] [CrossRef]
- Roberts, D.A.; Dennison, P.E.; Gardner, M.; Hetzel, Y.; Ustin, S.L.; Lee, C. Evaluation of the Potential of Hyperion for Fire Danger Assessment by Comparison to the Airborne Visible/Infrared Imaging Spectrometer. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1297–1310. [Google Scholar] [CrossRef]
- Roberts, D.; Halligan, K.; Dennison, P.; Dudley, K.; Somers, B.; Crabbé, A. VIPER Tools. 2019. Available online: https://drive.google.com/drive/folders/0B0zkcpjAaSqFbUVacVJCSURtSzQ (accessed on 15 November 2020).
- Rouse, J.W.; Haas, H.R.; Deering, D.W.; Schell, J.A.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; NASA/GSFC Type III Final Rep.; The Goddard Space Flight Center: Greenbelt, MD, USA, 1974; 371p.
- Gitelson, A.A.; Keydan, G.P.; Merzlyak, M.N. Three-Band Model for Noninvasive Estimation of Chlorophyll Carotenoids and Anthocyanin Contents in Higher Plant Leaves. Geophys. Res. Lett. 2006, 33, L11402. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Chivkunova, O.B.; Merzlyak, M.N. Non-Destructive Estimation of Anthocyanins and Chlorophylls in Anthocyanic Leaves. Am. J. Bot. 2009, 96, 1861–1868. [Google Scholar] [CrossRef] [PubMed]
- Gitelson, A.A.; Merzlyak, M.N.; Chivkunova, O.B. Optical Properties and Nondestructive Estimation of Anthocyanin Content in Plant Leaves. Photochem. Photobiol. 2001, 74, 38–45. [Google Scholar] [CrossRef]
- Farrens, G. Color Change and Succulence in Salicornia pacifica. Master’s Thesis, San Jose State University, San Jose, CA, USA, 1971. [Google Scholar]
- Environmental Systems Research Institute. ArcGIS. Version 10.7.1; Environmental Systems Research Institute, Inc.: Redlands, CA, USA, 2019. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing, Vienna, Austria. 2019. Available online: https://www.R-project.org/ (accessed on 15 November 2020).
- Lee, C. Feature Importance Measures for Tree Models—Part 1. 2017. Available online: https://medium.com/the-artificial-impostor/feature-importance-measures-for-tree-models-part-i-47f187c1a2c3 (accessed on 11 December 2020).
- Oliver, T.H.; Heard, M.S.; Issac, N.J.B.; Roy, D.B.; Procter, D.; Eigenbrod, F.; Freckleton, R.; Hector, A.; Orme, C.D.L.; Petchey, O.L. Biodiversity and Resilience of Ecosystem Functions. Trends Ecol. Evol. 2015, 30, 673–684. [Google Scholar] [CrossRef]
- Oehri, J.; Schmid, B.; Schaepman-Strub, G.; Niklaus, P.A. Biodiversity Promotes Primary Productivity and Growing Season Lengthening at the Landscape Scale. Proc. Natl. Acad. Sci. USA 2017, 114, 10160–10165. [Google Scholar] [CrossRef] [PubMed]
- Torio, D.D.; Chmura, G.L. Assessing Coastal Squeeze of Tidal Wetlands. J. Coast. Res. 2013, 29, 1049–1061. [Google Scholar] [CrossRef]
- Rosencranz, J.A.; Ganju, N.K.; Ambrose, R.F.; Brosnahan, S.M.; Dickhudt, P.J.; Guntenspergen, G.R.; MacDonald, G.M.; Takekawa, J.Y.; Thorne, K.M. Balanced Sediment Fluxes in Southern California’s Mediterranean-Climate Zone Salt Marshes. Estuaries Coast 2016, 39, 1035–1049. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Resolution (m) | Central Wavelength (nm) | Bandwidth (nm) | Description |
|---|---|---|---|---|
| B1 | 60 | 443 | 21 | Ultra blue (Coastal and Aerosol) |
| B2 | 10 | 490 | 66 | Blue |
| B3 | 10 | 560 | 36 | Green |
| B4 | 10 | 665 | 31 | Red |
| B5 | 20 | 705 | 15 | Visible and Near Infrared (VNIR) |
| B6 | 20 | 740 | 15 | Visible and Near Infrared (VNIR) |
| B7 | 20 | 783 | 20 | Visible and Near Infrared (VNIR) |
| B8 | 10 | 842 | 106 | Visible and Near Infrared (VNIR) |
| B8a | 20 | 865 | 21 | Visible and Near Infrared (VNIR) |
| B9 | 60 | 940 | 20 | Short Wave Infrared (SWIR) |
| B10 | 60 | 1375 | 31 | Short Wave Infrared (SWIR) |
| B11 | 20 | 1610 | 91 | Short Wave Infrared (SWIR) |
| B12 | 20 | 2190 | 175 | Short Wave Infrared (SWIR) |
| Polygon Counts | |||||
|---|---|---|---|---|---|
| Class | November 2017 | January 2018 | November 2018 | November 2020 | Metric |
| Bare soil | 10 | 11 | 17 | 13 | High Bare Soil Fractions, Low NDVI, Low mARI |
| High Marsh | 5 | 5 | 10 | 7 | High Green Vegetation Fraction, High NDVI, High mARI |
| Mid Marsh | 12 | 7 | 16 | 13 | Moderate-High NDVI, Mixed Green Vegetation Fractions and Bare Soil Fractions |
| Senesced | 8 | 5 | 8 | 5 | High Non-photosynthetic Vegetation Fractions, Low NDVI, High mARI |
| Subtidal | 20 | 7 | 21 | 19 | High Subtidal Fractions, Low NDVI |
| Date | Soil Fraction | Green Veg Fraction | Senesced Fraction | Subtidal Fraction | Shade Fraction | NDVI | mARI | Digital Terrain |
|---|---|---|---|---|---|---|---|---|
| November 2020 | 62.24 | 58.33 | 45.79 | 31.21 | 46.56 | 109.52 | 99.69 | |
| November 2018 | 55.01 | 63.01 | 25.91 | 50.83 | 20.55 | 60.63 | 17.14 | |
| January 2018 | 31.07 | 43.72 | 41.79 | 28.53 | 8.96 | 17.28 | 4.87 | 23.17 |
| November 2017 | 40.61 | 94.05 | 60.13 | 23.08 | 34.99 | 83.23 | 21.95 |
| Class | November 2017 | January 2018 | November 2018 | November 2020 | ||||
|---|---|---|---|---|---|---|---|---|
| User’s Error | Producer’s Error | User’s Error | Producer’s Error | User’s Error | Producer’s Error | User’s Error | Producer’s Error | |
| Bare Soil | 0.103 | 0.062 | 0.038 | 0.05 | 0.020 | 0 | 0.061 | 0.013 |
| High Marsh | 0 | 0 | 0.017 | 0.048 | 0 | 0 | 0.006 | 0.011 |
| Mid Marsh | 0.030 | 0.072 | 0.171 | 0.105 | 0 | 0.024 | 0.071 | 0.064 |
| Senesced Veg. | 0.019 | 0.088 | 0 | 0 | 0.018 | 0 | 0 | 0.009 |
| Subtidal/Water | 0.12 | 0.029 | 0.1 | 0.1 | 0 | 0 | 0.061 | 0.089 |
| Accuracy | Kappa | Accuracy | Kappa | Accuracy | Kappa | Accuracy | Kappa | |
| Final Model Accuracy | 0.995 | 0.993 | 0.930 | 0.911 | 0.956 | 0.943 | 0.971 | 0.963 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silva, G.D.; Roberts, D.A.; McFadden, J.P.; King, J.Y. Shifts in Salt Marsh Vegetation Landcover after Debris Flow Deposition. Remote Sens. 2022, 14, 2819. https://doi.org/10.3390/rs14122819
Silva GD, Roberts DA, McFadden JP, King JY. Shifts in Salt Marsh Vegetation Landcover after Debris Flow Deposition. Remote Sensing. 2022; 14(12):2819. https://doi.org/10.3390/rs14122819
Chicago/Turabian StyleSilva, Germán D., Dar A. Roberts, Joseph P. McFadden, and Jennifer Y. King. 2022. "Shifts in Salt Marsh Vegetation Landcover after Debris Flow Deposition" Remote Sensing 14, no. 12: 2819. https://doi.org/10.3390/rs14122819
APA StyleSilva, G. D., Roberts, D. A., McFadden, J. P., & King, J. Y. (2022). Shifts in Salt Marsh Vegetation Landcover after Debris Flow Deposition. Remote Sensing, 14(12), 2819. https://doi.org/10.3390/rs14122819