1. Introduction
Synthetic aperture radar (SAR) is an active ground sensing system which might be used in severe weather conditions, such as clouds, rain and fog [
1]. Throughout the development of SAR, high resolution and wide swath imaging have always been two important factors driving the development of SAR [
2,
3,
4]. The high resolution can provide more detailed target information, which is good for target identification and feature extraction [
5,
6]. In future Earth observation applications, SAR is usually required to have continuous global coverage, such as wide-range map mapping, regular homeland applications, ocean and glacier monitoring, etc. [
7,
8]. Wide swath also means shortening the revisit period of the same area so that a specific area of the Earth’s surface will be observed at a higher frequency for immediate analysis of the situation and problem solving [
9]. Consequently, high resolution and wide swath (HRWS) have become the important indicators of future SAR imaging capability.
SAR with high resolution imaging of the ground (such as resolution of more than 1 m) and wide enough ground swath imaging (such as swath of more than 100 km), are more suitable for future remote sensing and telemetry applications [
10]. This has made high resolution and wide swath imaging an important research direction in the field of SAR research in recent years.
Due to the existence of minimum antenna area, the contradiction between azimuth resolution and mapping width has become a difficult obstacle for traditional single-channel SAR systems to overcome [
11]. High resolution and wide swath are two contradictory metrics that cannot be satisfied simultaneously. The solution to the contradiction between high resolution and wide swath of traditional single-channel SAR is to adopt multi-channel SAR systems.
The elevation multi-channel technology is a new technology established with the development of digital signal processing methods, which not only can completely retain the information collected on the array antenna, but also can utilize complicated digital signal processing methods to process the signal. It can form flexible transmitting and receiving beam outputs using digital signal processing techniques at the baseband digital end, which we call digital beamforming (DBF) [
12].
DBF technology applies in the SAR receiver port, using the scan-on-receive (SCORE) technique [
13], which divides the antenna at the receiver port into multiple sub-apertures, and the signals received by each sub-aperture are amplified, down-converted and digitized separately. As a result, the SCORE-based system increases the reception gain of the useful signal and suppresses the range ambiguity compared to the traditional single-channel SAR system.
Although the technical feasibility and performance of elevation multi-channel SCORE systems have been demonstrated in numerous studies over the past few years, the identification and validation of adequate calibration strategies are still lacking and urgently needed.
Several papers in recent years have proposed various SAR operating modes in conjunction with SCORE technology [
14,
15], and the research on elevation multi-channel SCORE technology has mainly focused on solving the elevation mismatch problem that exists due to ambiguous range and large terrain undulations [
16,
17], as well as on the optimization of the weighting coefficients for each channel in the elevation [
18]. In the discussion of these problems, most of the articles assume that each channel is in an ideal state and do not consider the variability between channels in practice.
With the widening of the elevation swath, the slant range error between the ground target and each channel is spatially variable along the elevation, which makes it difficult to maintain high reception gain throughout the entire swath with the elevation multi-channel SCORE technique. The introduction of the multi-channel will bring a variety of errors, and in the actual working process, due to the influence of temperature, power supply voltage and system manufacturing process, the frequency response function of each channel does not maintain good consistency, which leads to the beam pointing deviation after DBF being very large [
19].
Consequently, the multi-channel SAR systems need to be calibrated. However, the major existing calibration methods for multi-channel systems are for azimuthal multichannel systems [
20,
21,
22], as there are already on-orbit azimuthal multi-channel systems, such as GF-3 [
23], and there is no on-orbit spaceborne DBF-SAR system yet, but some countries have developed airborne DBF-SAR systems to experiment for future on-orbit spaceborne DBF-SAR systems [
24,
25]. Up to now, for the azimuth multi-channel SAR system, the calibration methods fall into two main categories: one is the orthogonal subspace method, and the other method is the azimuthal correlation method [
26,
27,
28]. However, due to the complex structure of DBF-SAR, the above calibration methods could not apply to DBF-SAR. Some internal calibration methods are proposed to solve the imbalance between elevation channels of DBF-SAR [
29,
30]. However, the internal instrument calibration methods exclude the error source in the SAR antenna. In the actual work, the SAR antenna as an error source must be considered.
So, in this paper, the echo model of each receiving channel and the model for DBF-SAR are demonstrated. Furthermore, we propose an external calibration-based DBF-SAR channel calibration method, which uses the strong scattering characteristics of the external calibration points. The method requires the multi-channel data of the external calibration area to be downlinked to the ground for processing. This is based on the following considerations: (1) The longitude, latitude, elevation and corner reflector information of the external calibration area are all known. (2) The multi-channel data are firstly downlinked to the ground for processing, and then the estimated sampling delay, amplitude and phase errors are uploaded to the satellite and corrected, which can considerably reduce the computational workload on the satellite. (3) This means that it is feasible to correct the estimated inter-channel errors to the satellite in real time. (4) The ability to downlink data from each channel to the ground is necessary for DBF-SAR in system design.
This paper is organized as follows. In
Section 2, the elevation multi-channel DBF-SAR is analyzed and modeled in detail. In
Section 3, the proposed method is described in detail. In
Section 4, the processing results for both simulated data and real data are presented and quantitatively analyzed. As a comparison, the results of the traditional methods are presented.
Section 5 is the discussion.
Section 6 presents the conclusions of the paper.
2. Model of DBF-SAR
The traditional single-channel SAR system adopts single transmitting and single receiving mode in operation. During the whole illuminating time and receiving time, the main lobe of the antenna pattern covers the whole mapping strip, and the beam points to the center of the mapping strip and does not change. Thus, the gain at the center of the mapping strip is maximal, while the gain at the edge of the mapping strip will be gradually reduced. However, the DBF-SAR adopts single transmitting and multiple receiving mode;
Figure 1 shows the geometric schematic diagram of the working of the DBF-SAR. It can be seen from the figure that the receiving antenna is divided into multiple sub-apertures in elevation, and each sub-aperture can be regarded as a channel. One sub-aperture transmits a wide beam to cover the mapping strip when transmitting, and all sub-apertures transmit a wide beam to receive. By weighting the received signals of each sub-aperture and accumulating them, a time-varying high-gain narrow receiving beam can be formed, and the narrow beam can be used for real-time scanning reception, which can improve the reception gain, achieve the maximum gain reception of the echo signal for the whole swath, and reduce range ambiguity.
The block diagram is shown in
Figure 2, which shows that the received signal is processed separately by each receiving channel, and then amplified, downconverted and I/Q quadrature demodulated into a zero IF signal without distortion. Then the zero IF signal is transformed into a digital signal by A/D conversion, and finally the digital signal obtained from each channel is weighted and summed up to realize the DBF of the elevation multi-channel signal.
Through multi-channel signals after DBF processing, echo energy enhancement can be achieved, extending the effective mapping bandwidth, generating a flexible high-gain narrow receive beam, and tracking the instantaneous arrival direction of the radar pulse echo in real time, which maximizes the receive gain of the signal of interest and effectively reduces ambiguous echoes.
The chirp signal transmitted by the radar transmitter can be expressed as
where
is denoted as a complex constant related to the backscattering and incident angle,
is the carrier frequency,
is the FM rate,
T is the pulse duration, and
t is the fast time.
Taking a point target as an example, the echo signal of the point target received by the reference channel is
The in the above equation represents the time from the point target to the reference channel after transmitting a pulse.
The echo signal received by the nth aperture is amplified, down-converted and digitized to obtain the digital baseband signal as
where
n = 1,…,
N
where
is the distance between the nth aperture and the reference channel,
is the beam look down angle at time
, and
is the antenna normal look down angle. Let
, where
is the antenna normal deviation angle, so
. Supposing the Earth is a sphere, the angle of view corresponding to the direction of echo received by radar at time
t,
could be expressed as
where
is Earth’s radius, and
represents the target slant range corresponding to the echo received at time
t. The weight coefficient
could be represented as
The signal after weighting by the weight coefficient and summed up is
The echo range of the point target can be expressed as when the transmitting pulse passes the point target; the digital beamforming by the weighting process only points to the direction of the point target when , and thus the maximum gain of the antenna is not available at other echo times.
Therefore, the output signal after DBF could be expressed as
3. Method
The above signal model is the ideal signal model. However, in the DBF-SAR system, each individual received channel contains a power amplifier, mixer, low-noise amplifier, filter, A/D converter and transmission cable, so there are small differences in the connection status of electronic devices among channels, resulting inevitably in channel errors, such as amplitude error, phase error, and sampling delay error among channels.
Usually, the slant range difference between the target in the mapping strip and the receiving antenna for each channel is tiny, commonly centimeters in DBF-SAR [
31], so it can be assumed that the elevation signal envelope between each channel is the same. Therefore, the signal model with time delay, amplitude and phase errors received by the receiving channel can be approximated as
where
is the amplitude error,
is the sampling delay error,
is the phase error. When the channels exist above channel imbalance, it will result in the beam pointing after weighted and be summed to the incorrect main lobe gain decrease and sidelobe rise.
Figure 3 shows the influence of the channel imbalance, where the red dotted line is the single channel antenna pattern and the blue line is the antenna pattern of DBF-SAR.
We could obtain the SAR image of each channel by multi-channel data for calibration. The two-dimensional imaging model of multi-channel data received on the ground is
The channel imbalance in the DBF-SAR system will cause the deviation of the weighted beam pointing, the main lobe gain decreases and the sidelobe increases. Finally, it will decrease the DBF-SAR image quality.
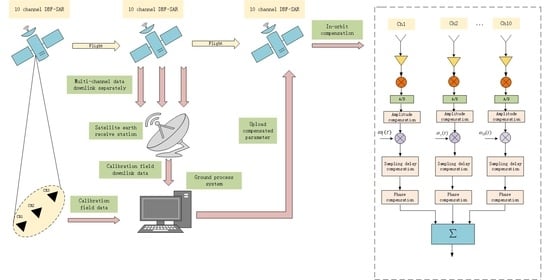
This paper proposes a method based on the external calibration to solve the channel imbalance. So, for the purposes of our discussion, we need to downlink the multi-channel data to the ground for processing, which can significantly reduce the amount of in-orbit computing.
Figure 4 shows the workflow of the proposed method.
3.1. Physical Experiment Conditions
3.1.1. Selection of the Calibration Equipment
Commonly used SAR calibrators are divided into two types, active/passive [
32]: active calibrators include receivers, transponders, while passive calibrators include the trihedral corner reflector, dihedral corner reflector, metal ball, etc.
The transponders can be designed with high radar cross section (RCS) values [
33], so the device can be miniaturized, but at a high cost. Passive calibrators’ RCS values are related to their size. In order to achieve the same RCS as transponders, the equipment is designed to be huge, but because of their lower cost, they are widely used for calibrations.
Considering the cost, RCS, deployment difficulty, and other factors, we choose the trihedral corner reflector here. The RCS value of the trihedral corner reflector should be 20 dB higher than the total emissivity of the SAR image resolution unit, but not more than the upper limit of the level signal that can be received. The formula for calculating the RCS of a trihedral corner reflector is as follows:
where
a is the side length of the trihedral corner reflector, and
is the wave length. So, we choose the trihedral corner reflector with the side length of approximately 0.7 m, for which the RCS is approximately 30 dB for the calibration.
3.1.2. Selection of the Calibration Field
The placement of the trihedral corner reflectors should consider the impact of the background clutter of the terrain. So, they should be placed in a flat and level area to avoid the influence of shadows and shading.
3.2. Sampling Delay Estimation Method
We adopt the external calibration method to estimate the sampling delay, so we put the corner reflector on the ground. By illuminating the corner reflector area, we could obtain the multi-channel data with information of the corner reflector. Then use the multi-channel data to obtain every receiving channel SAR image, where the ground control point shows as a peak point in the SAR image. Let the transmitted channel be the reference channel.
Through the geographic location of the ground control point and the pixel coordinates of the ground control point on the reference image, where the pixel coordinate of the i’th ground control point in the reference channel SAR image is and the pixel coordinate of the i’th ground point in the n’th receive channel SAR image is , the sampling delay can be estimated by comparing the slant range of the reference channel and other error channels.
The sampling delay of each ground control point can be expressed as
The estimated value of sampling time delay error is the mean value of the sampling delay deviation of each control point of the channel. The sampling delay of each receiving channel contains only accidental errors. According to the statistical definition of truth, when the observed quantity contains only accidental errors, its mathematical expectation is its truth value. Therefore, the statistical average value of several fixed punctuation delays for each channel is the channel delay fixed value of the channel.
However, the point target in the SAR image is formed by multiple high amplitude pixels; comparing the peak point positions of the reference channel image and the error channel image directly will produce relatively large deviations. Therefore, we interpolate the local SAR image to determine the position of the corner reflector in the SAR image with an accuracy better than 1/10th of a pixel. When the range sampling distance is 1 m, the control point measurement accuracy in the SAR image is 0.1 pixel, and the error caused by the inaccurate measurement of control points is better than 0.1 m.
The steps are shown below:
To obtain the SAR image of each channel on the ground;
Obtain the pixel coordinates of all calibration points in each channel SAR image;
Calculate the position deviation of each calibration point in the reference channel image and the error channel image after interpolating, and calculate the mean value that is the sampling delay estimated result.
3.3. Amplitude Error Estimation Method
Here, we use the strong scattering of the corner reflector to estimate the amplitude error between channels, so the corner reflector is placed on a flat and level scene for calibration. In this case, the corner reflector is a strong target point in the scene and is represented as a peak point in the echo signal.
Because the distance between the receiving channels is tiny, with the echo signal after range compression, the
function nearly does not change near the maximum value. So, when there is no noise, the amplitude error between channels can be obtained by calculating the ratio of the reference channel signal and the error channel signal after range compression. The traditional method is to filter the noises of echoes of different channels and reference channels on the satellite first to avoid the interference of noise, and then to divide and obtain the amplitude error of each channel. However, the noise is often very difficult to eliminate thoroughly, so in practice, we could consider obtaining the point target SAR image to reduce the effect of noise.
Therefore, the amplitude error could be expressed as
The steps are shown below:
To obtain SAR image of each channel on the ground;
Calculate the amplitude of the complex image data of the reference channel and the error channel, and then divide them.
3.4. Phase Error Estimation Method
Due to the structure of DBF-SAR, it is known that, due to the different positions of different receiving apertures, i.e., each signal has phase error due to the different return distances, it is necessary to introduce the corresponding phase compensation factor
for each receiving channel, and then the phase estimation is performed. Therefore, after compensating for the fixed phase deviation, the phase error can be obtained by dividing the reference channel and the error channel after imaging and taking the phase angle.
However, due to many components of phase, the above method is commonly very inaccurate in extracting the phase error, so here we use an algorithm based on the maximum contrast of the image to estimate the phase error between channels [
34].
Since the existence of the obtained phase error between channels decreases the image contrast between channels, the larger the phase error, the smaller the contrast, and the image contrast is maximized when there is no error. Therefore, the problem of correcting for phase errors can be transformed into maximizing the contrast of the obtained image, so the optimization algorithm of the maximum image contrast can be used to optimize the SAR image after digital beamforming, which can estimate the phase deviation between channels.
The contrast of the image can be defined as the ratio of the standard deviation of the image intensity to the mean value, which can be expressed as
where
denotes the image after DBF with phase error and
denotes the mean value. For the given SAR image,
is a constant, so a simpler equivalent form of contrast can be obtained. Therefore, we choose a metric based on the 4-norm as the contrast function, where the p-norm could be expressed as
So, our objective function eventually can be defined as
where
i,
j is the pixel coordinate of the image. Therefore, the estimated phase error is
assuming that this average contrast is a smooth function of the calibration vector
. Finally, the gradient descent method is used to continuously optimize the above equation with the following steps:
Obtain the raw data of each channel;
Calculate the gradient of the contrast function;
Update the phase correction function
- 4.
Determine whether the convergence is satisfied; if not, repeat step 2.
4. Results
In this section, simulation experiments are conducted using the raw data of the forward side-looking strip mode airborne SAR, and the echo data are used to simulate a 10-channel DBF-SAR system with the parameters shown in
Table 1.
To simulate the external calibration scene, three strong points are added artificially to the original echo in the azimuthal direction to simulate the corner reflector.
To simulate the DBF-SAR channels imbalance, the time delay, amplitude, and phase errors are added to each receive channel, except the reference channel, in the process of raw data generation for each channel as shown in
Table 2, and Gaussian white noise is added. The time delay is uniformly distributed in the interval of [−30 ns, 30 ns], the amplitude error is uniformly distributed in the interval of [−3 dB, 3 dB], the phase error is uniformly distributed in the interval of [−45°, 45°]. Let channel 1 be the reference channel to simulate the transmitted channel of the DBF-SAR.
4.1. Sampling Time Delay Estimation
Since a strong point target in a SAR image is usually composed of multiple pixel points with high amplitude values, a certain bias will occur if we choose to directly compare the peak point locations in the image.
Figure 5a shows the simulation of point target imaging before interpolation.
Here, we choose a sinc tenfold interpolation, and
Figure 5b shows the simulated image of the point target after sinc interpolation.
It can be seen as shown in
Figure 5 that the point target image is smoother after tenfold interpolation. Therefore, by extracting the positions of the three strong point targets in the reference channel image and the error channel image and taking the statistical average of the deviations of the positions of all the strong point targets, we can obtain the estimated results, as shown in
Table 3. We call the direct comparison of peak point locations without interpolation method 1 and then compare it with the method proposed in this paper.
4.2. Amplitude Error Estimation
The sampling delay of each channel obtained from the above estimation is compensated, and the amplitude is estimated again for the channel again after compensating for the time delay error. In the absence of noise interference, the reference echo directly after pulse compression is compared with the amplitude maximum of the error echo due to the inclusion of strong point targets in the echo, which is the amplitude error. However, the actual work often cannot avoid the interference of noise, so we select each channel echo for imaging processing, which can enhance the gain.
Figure 6 shows the local image of the reference image and an error image.
Here, we call the traditional method of filtering noise on the satellite for each channel echo and then dividing directly by the absolute value as method 1 and compare it with the method in this paper. And the estimated results of method1 and this paper method are shown in
Table 4.
4.3. Phase Error Estimation
As can be seen from the estimated parameters obtained in
Table 5, there is a large error in phase extraction of the reference channel image after comparing it with the error channel image. However, the optimized result obtained in this paper based on the maximum image contrast and continuous iteration by using the gradient descent method is very close to the setting value. We call the traditional method of filtering noise on the satellite for each channel echo and then extracting phase after dividing directly by the absolute value method 1, and then compare it with the method proposed in this paper.
4.4. Experiment Result Analysis
Through simulating the raw data of the forward side-looking strip mode airborne SAR and the simulation data of three point targets, we could obtain the above experiment result.
As can be seen from
Figure 7, the average delay estimation deviation of the delay error estimation method is 1.21 ns before interpolation, and 0.28 ns after tenfold interpolation. The average estimation error of the amplitude error estimation method is 0.43 dB compared with that of the echo directly. The average estimation error of the comparison after imaging is 0.02 dB. The phase error estimated method, which directly extracts the image after imaging, obtains 1.22° phase average estimation error, and maximizes the image contrast to obtain 0.28° phase average estimation error.
In order to verify the effect of the error estimation, we used the single-channel data, 10-channel DBF-SAR before calibration and 10-channel DBF-SAR after calibration. The calibration effect is obvious. Among them,
Figure 8a is the result of single-channel imaging.
Figure 8b,c are the results before and after calibration of 10-channel DBF-SAR. We selected the areas A (like A1, A2 and A3), B (like B1, B2 and B3) and C (like C1, C2 and C3) to observe the local details after DBF-SAR calibration as shown in
Figure 8a–c.
Figure 8d–f are the house.
Figure 8g–i are the ground calibration points.
Figure 8j–l are farmland. The whole scene and the corresponding local zoomed-in view for some special objects are compared and analyzed. The house, ground calibration points and the farmland in
Figure 8f,i,l are clearer after calibration. Owing to the improvement of the SNR, it is obvious that the results after 10-channel DBF processing can provide rich detailed information about the feature space and prominent structure and texture in the wide swath observation mission.
The DBF-SAR could form high gain and narrow beam to receive echo to obtain the high gain SAR image after digital beamforming. As can be seen from
Figure 8, compared with the single-channel SAR image, the SAR image after digital beamforming has a great improvement in the signal-to-noise ratio. As can be seen from
Figure 8b,c, the delay, amplitude and phase errors are corrected by the channel calibration method proposed in this paper, and the quality of the DBF-SAR image after compensating has improved significantly. The SNR of each image in
Figure 8 can be obtained as shown in
Table 6.
In
Table 6, after channel error correction, the SNR of SAR image after digital beamforming with channel error correction improves by about 5 dB, compared with that of the image after digital beamforming without channel error correction, and by about 8 dB compared with that of the single-channel SAR image, the channel signal coherence between the obvious ascension. Through comparing the A, B and C areas of the three images, it can be seen that, compared with the single channel imaging result, the DBF processing signal gain without the channel calibration processing is higher. Compared with the results without channel equalization, the DBF processing signal with channel calibration energy relative to the noise is enhanced obviously, and the image detail is more obvious. Finally, combined with
Table 6 and
Figure 8, the effectiveness of the proposed method is verified.
5. Discussion
According to the above experimental results, the DBF-SAR channel calibration method based on external calibration is practical and feasible. It can accurately estimate the time delay, amplitude and phase error between channels using external calibration points. Among them, by calculating the average delay estimation error of each channel, we can conclude that the estimation accuracy can reach 0.28 ns, and its performance is 0.4 mm accuracy at the slant range. Its estimation accuracy meets the requirement. Calculating the average amplitude estimation error of each channel, the estimation accuracy can reach 0.02 dB, and the estimation result is very accurate. The average phase estimation error of each channel can be calculated, and the estimation accuracy can reach 0.28°, which can also meet the needs in engineering. Moreover, by comparing the 10-channel DBF-SAR image without channel equalization with the single-channel SAR imaging without DBF, it can be seen that the DBF technique can effectively improve the signal-to-noise ratio and gain of the image.
Similarly, for each receive channel containing error after calibration, the imaging effect is greatly improved when DBF imaging is performed. Based on the above experimental results, our proposed external calibration method for DBF-SAR is practical and effective and can be applied to the actual calibration project. On account of no spaceborne DBF-SAR in orbit at present, there is no way to verify the compensation effect in the actual situation with specific projects. Therefore, the future study needs to be combined with specific calibration requirements to verify the role in the actual engineering.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}