

Road Network Extraction from SAR Images with the Support of Angular Texture Signature and POIs


 ,
,  ,
, 
Abstract
:1. Introduction
2. Methods
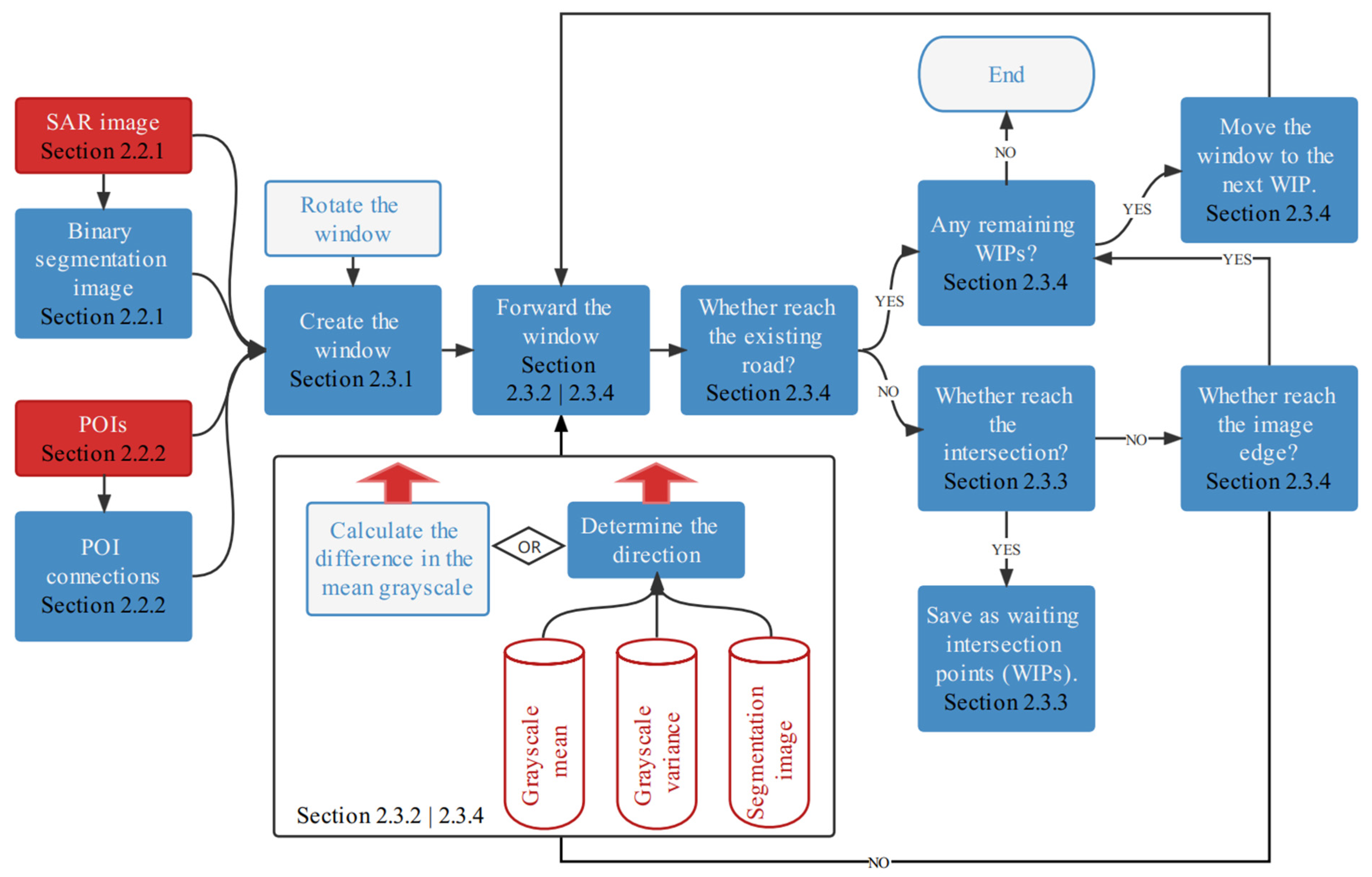
2.1. The Extraction Workflow
2.2. Data Preprocessing
2.2.1. SAR Image Preprocessing and Segmentation
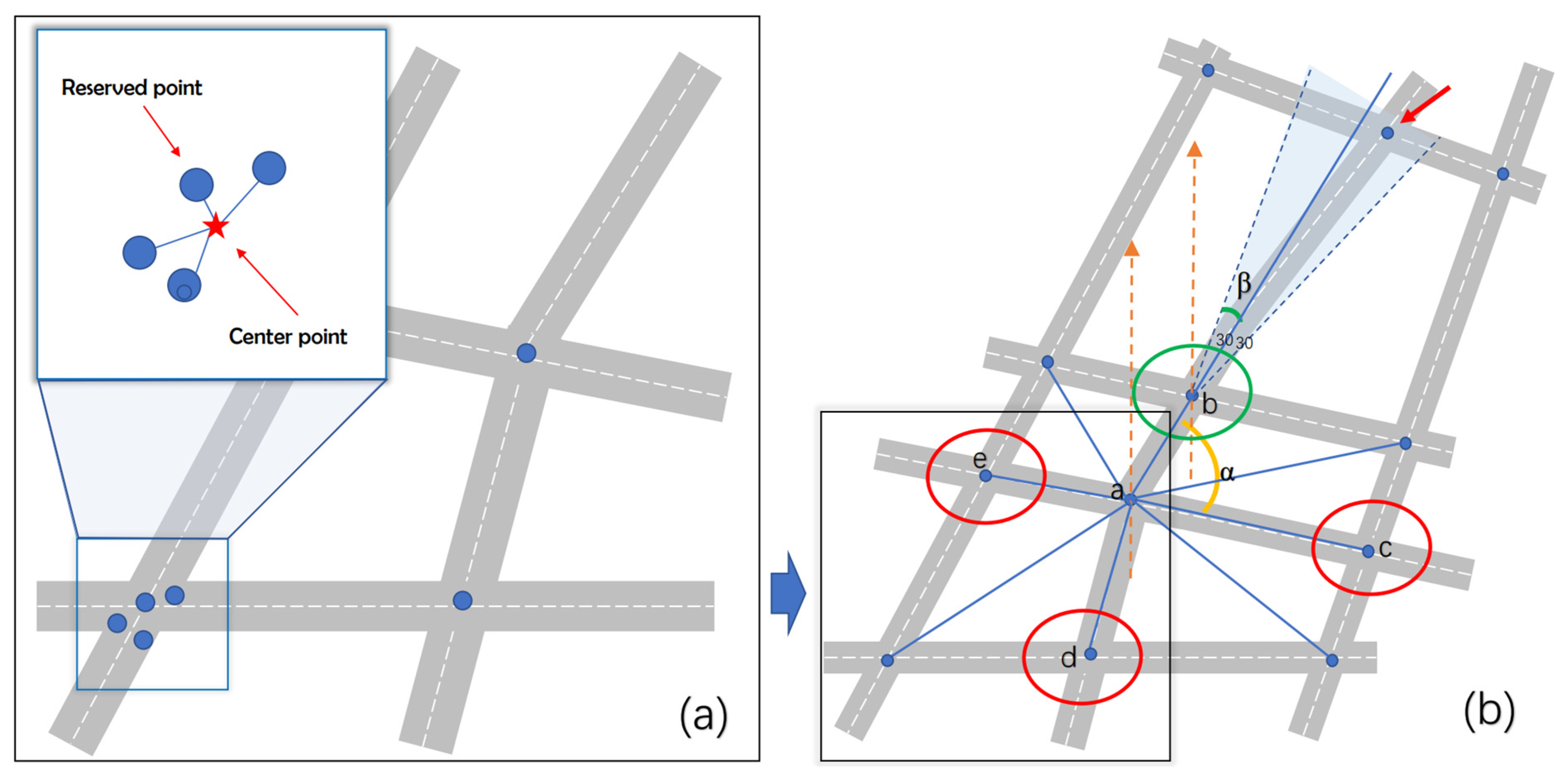
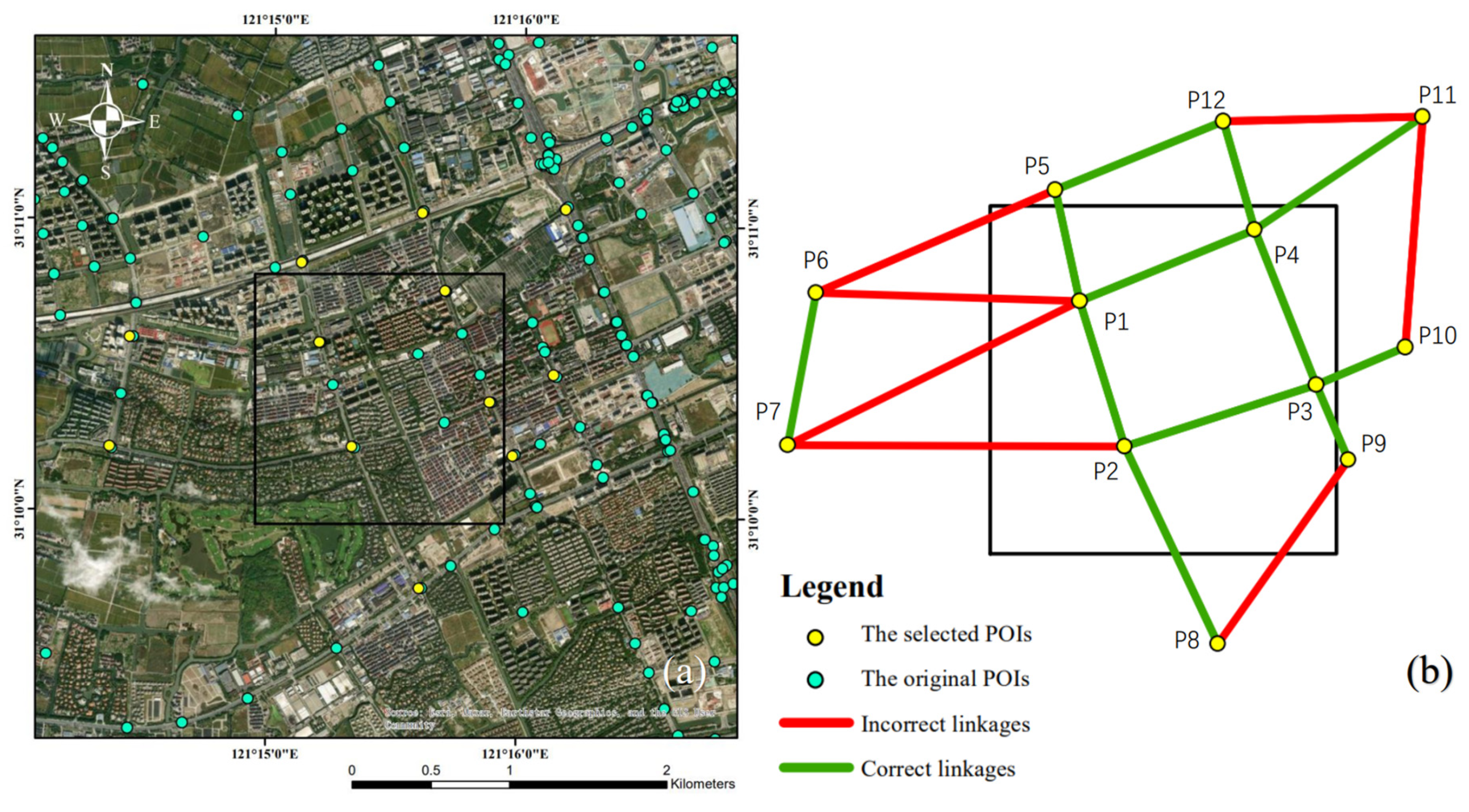
2.2.2. POI Processing and Linking
2.3. The ATP-ROAD Method
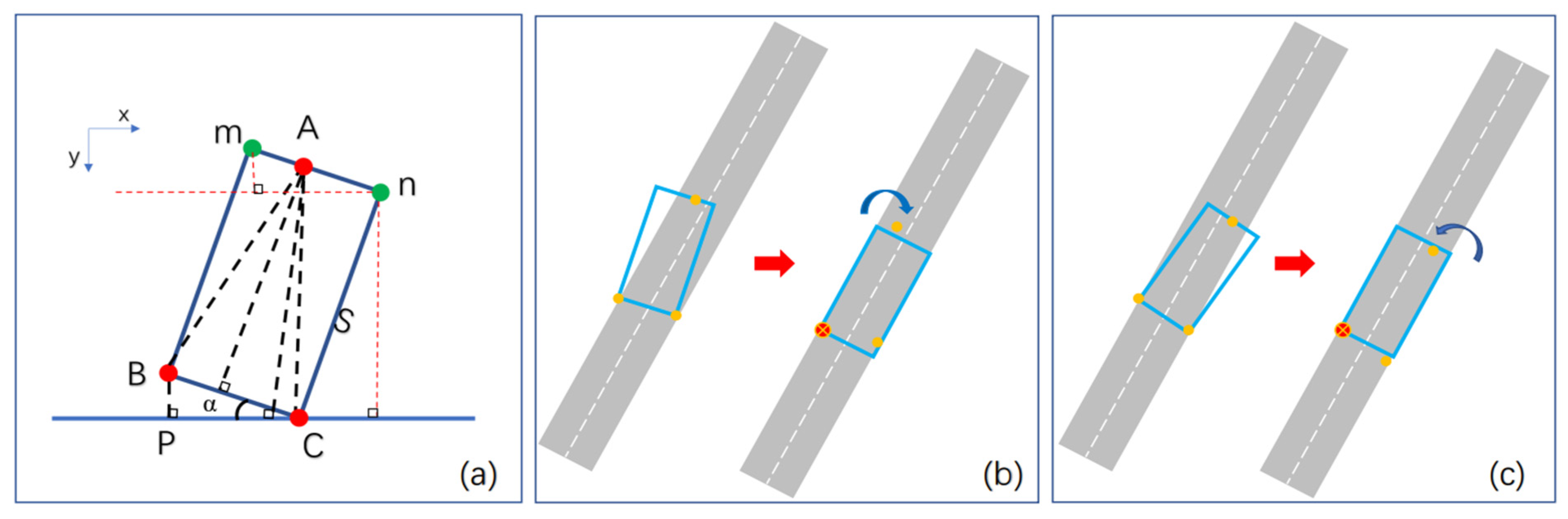
2.3.1. Definition of the Initial Window
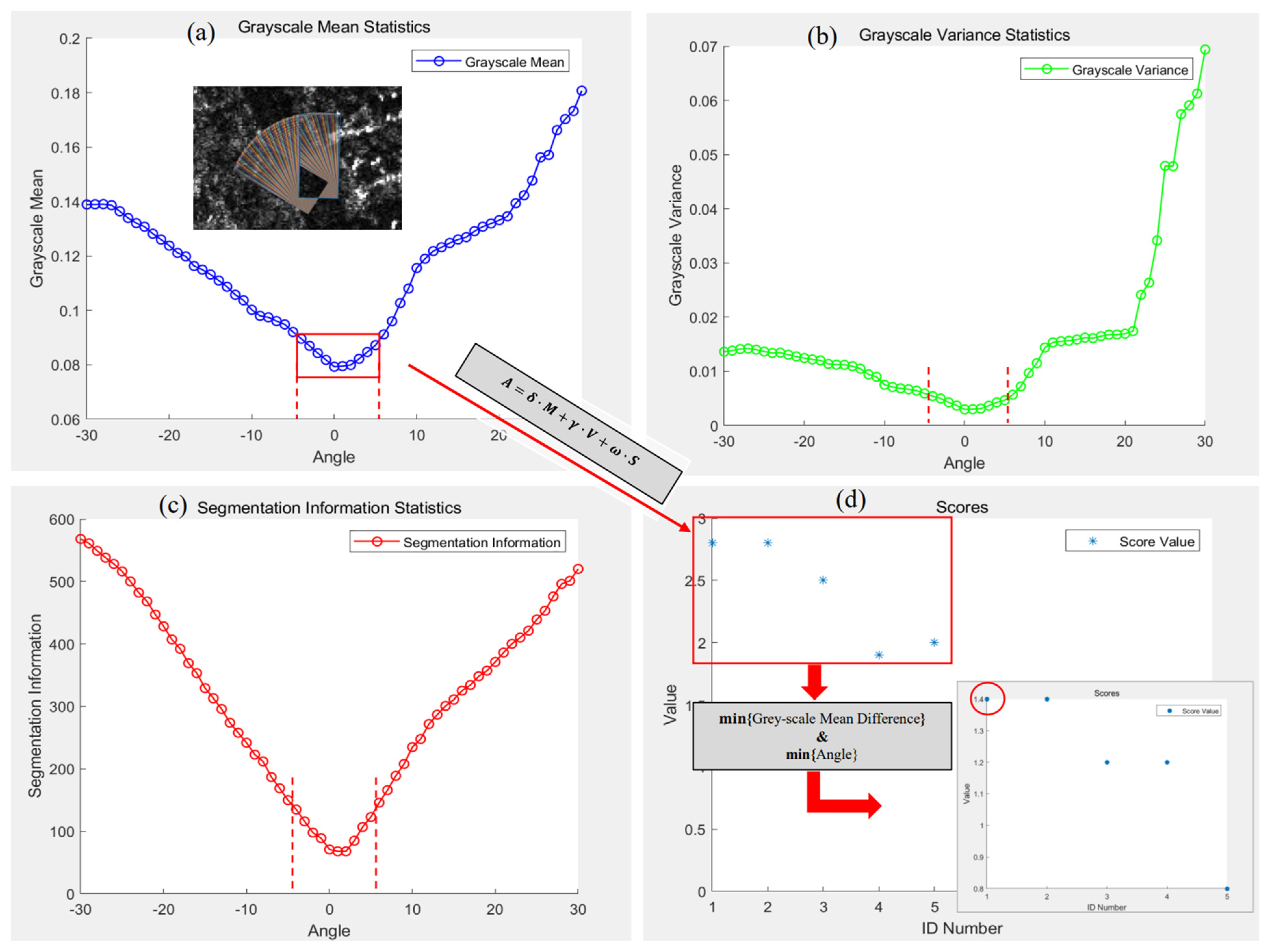
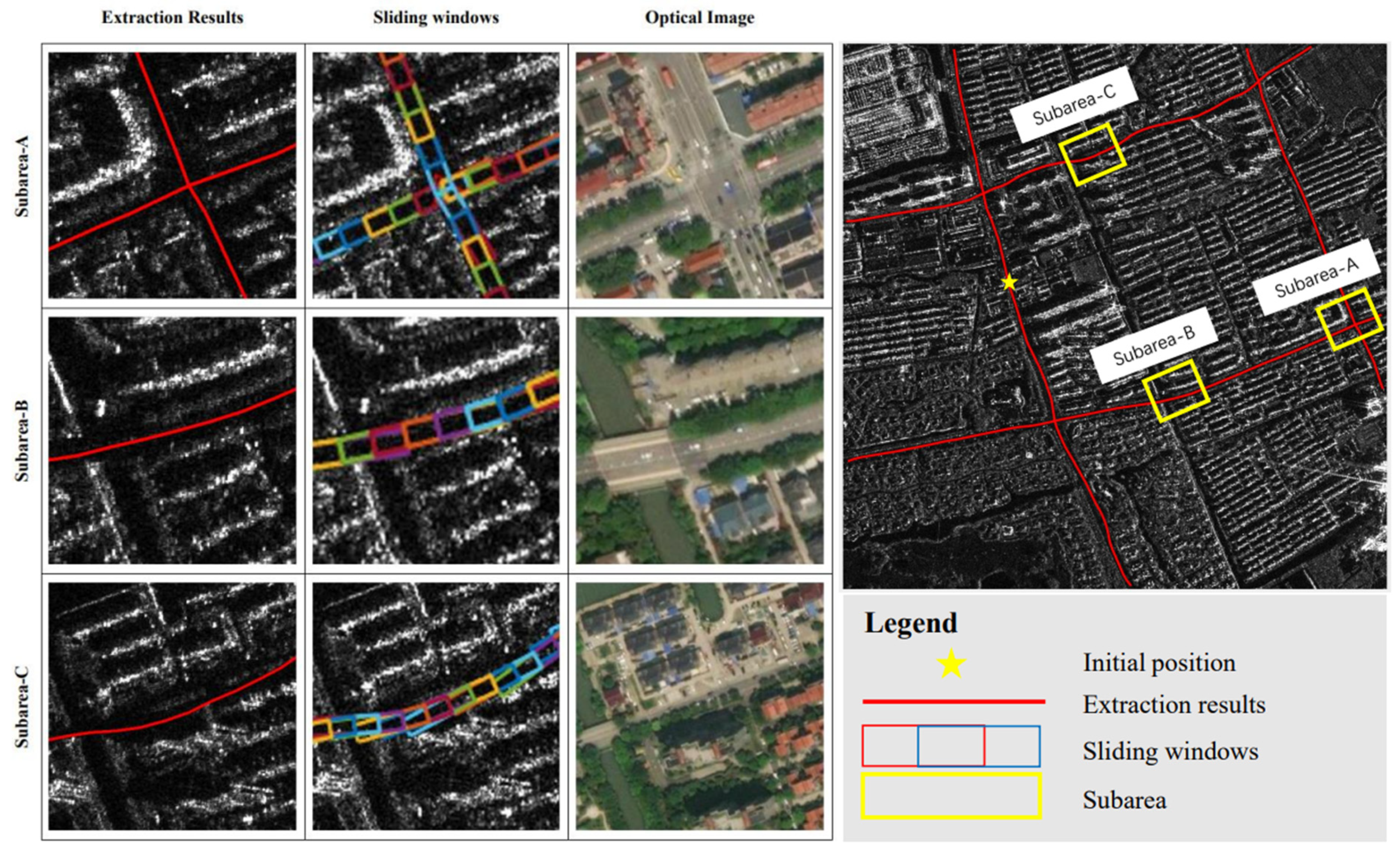
2.3.2. The Window Sliding Strategy
2.3.3. Intersection Recognition Method
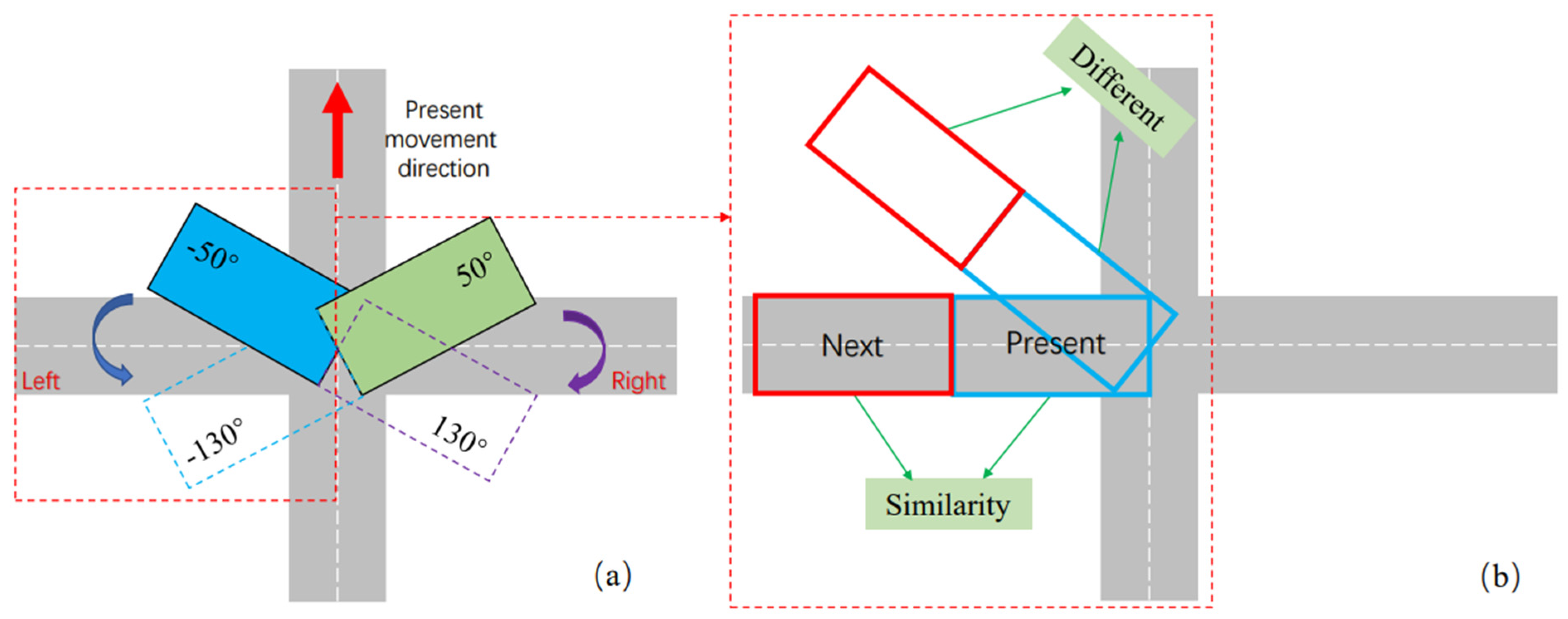
2.3.4. Movement Strategies
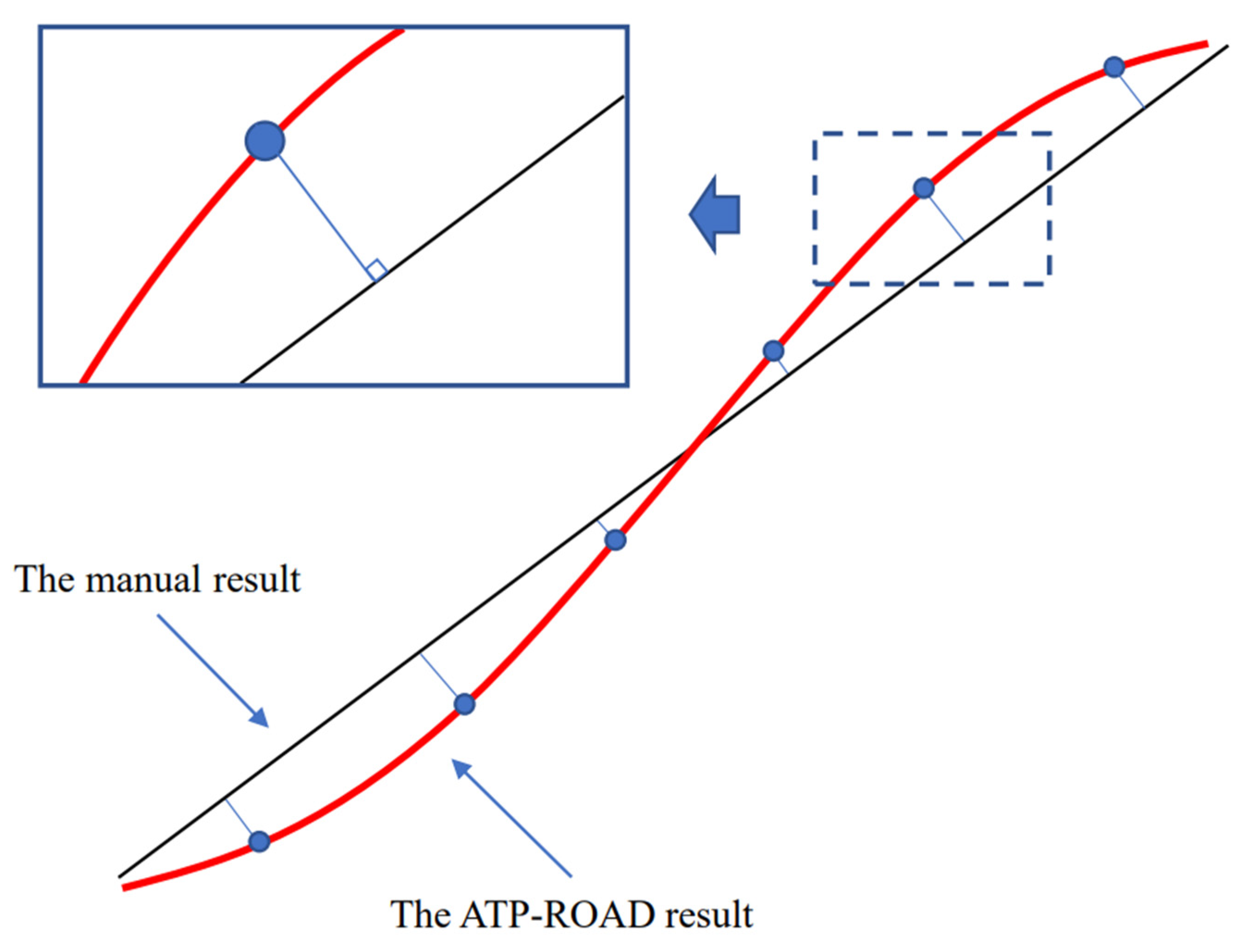
2.4. Accuracy Assessment Method
3. Experiments and Results
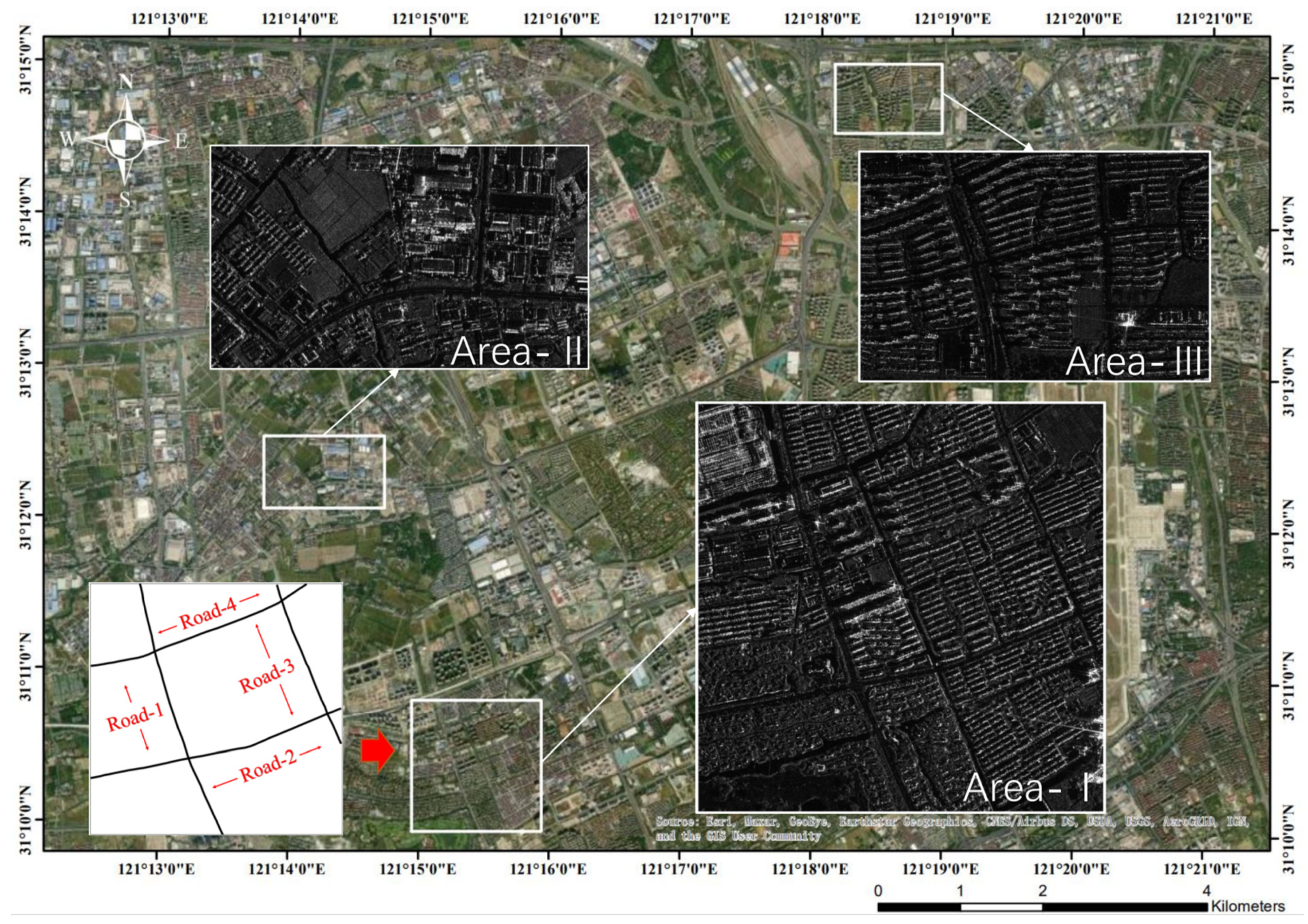
3.1. Experimental Areas and Datasets
3.2. POIs Processing Results
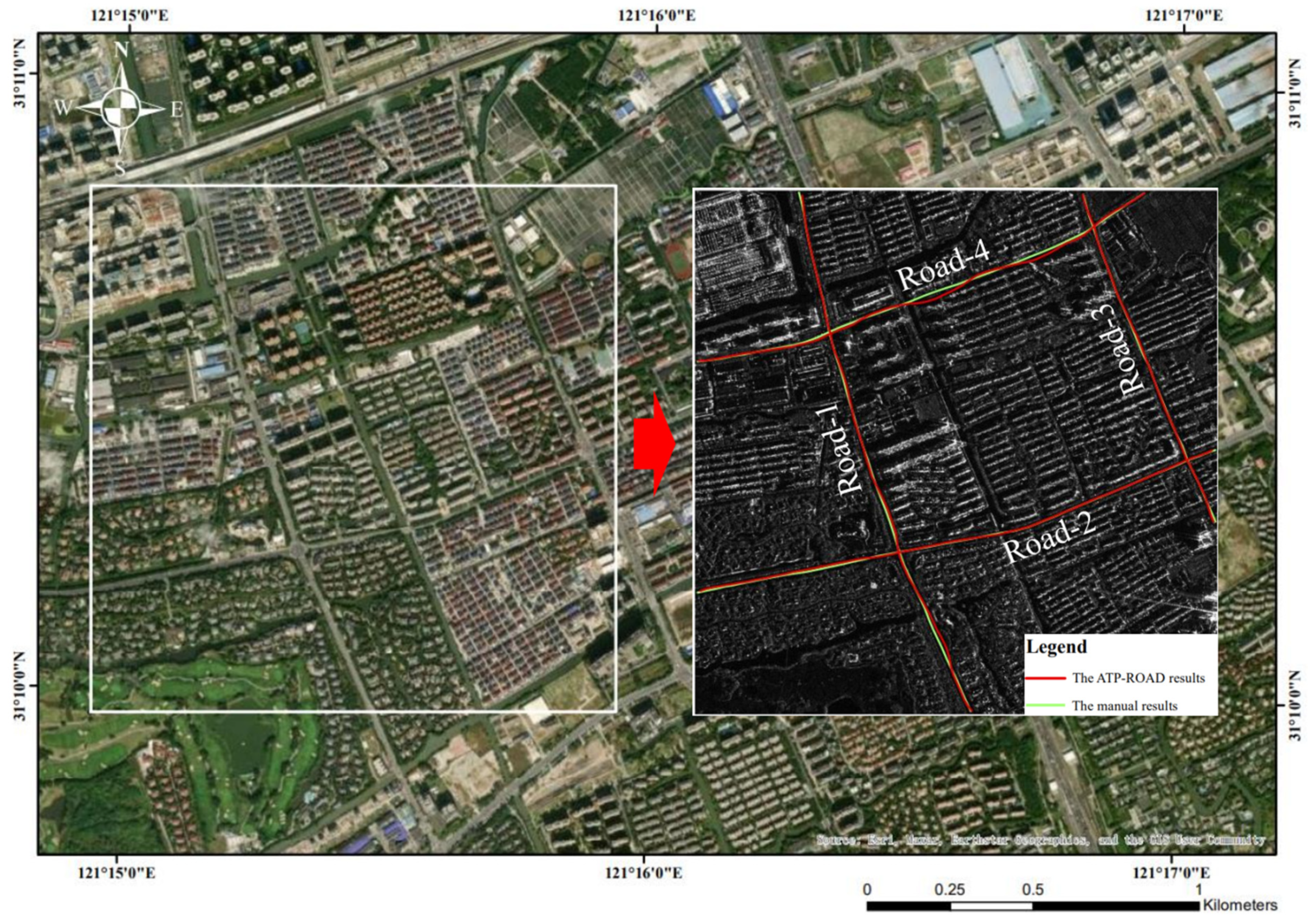
3.3. Extraction of Road Networks
3.4. Further Tests in other Areas
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, J.; Wu, H.; Guo, C.; Zhang, H.; Zuo, W.; Yang, C. Progress and Consideration of High Precision Road Navigation Map. Eng. Sci. 2018, 20, 99–105. [Google Scholar] [CrossRef]
- Jo, K.; Sunwoo, M. Generation of a Precise Roadway Map for Autonomous Cars. IEEE Trans. Intell. Transp. Syst. 2014, 15, 925–937. [Google Scholar] [CrossRef]
- Mena, J.B. State of the Art on Automatic Road Extraction for Gis Update: A Novel Classification. Pattern Recognit. Lett. 2003, 24, 3037–3058. [Google Scholar] [CrossRef]
- Feng, Y.; Zhou, Y.; Chen, Y.; Li, P.; Xi, M.; Tong, X. Automatic Selection of Permanent Scatterers-Based Gcps for Refinement and Reflattening in Insar Dem Generation. Int. J. Digit. Earth 2022, 1–21. [Google Scholar] [CrossRef]
- Feng, Y.; Lei, Z.; Tong, X.; Xi, M.; Li, P. An Improved Geometric Calibration Model for Spaceborne Sar Systems with a Case Study of Large-Scale Gaofen-3 Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 6928–6942. [Google Scholar] [CrossRef]
- Henry, C.; Azimi, S.M.; Merkle, N. Road Segmentation in Sar Satellite Images with Deep Fully Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1867–1871. [Google Scholar] [CrossRef]
- Wessel, B. Road Network Extraction from Sar Imagery Supported by Context Information. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 360–366. [Google Scholar]
- Cai, L.; Xu, J.; Liu, J.; Ma, T.; Pei, T.; Zhou, C. Sensing Multiple Semantics of Urban Space from Crowdsourcing Positioning Data. Cities 2019, 93, 31–42. [Google Scholar] [CrossRef]
- Li, G.; Hu, Y. Road Feature Extraction from High Resolution Remote Sensing Images: Review and Prospects. Remote Sens. Inf. 2008, 1, 91–95. [Google Scholar]
- Lian, R.; Wang, W.; Mustafa, N.; Huang, L. Road Extraction Methods in High-Resolution Remote Sensing Images: A Comprehensive Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5489–5507. [Google Scholar] [CrossRef]
- Li, Y.; Xu, L.; Piao, H. Semi-Automatic Road Extraction from High-Resolution Remote Sensing Image: Review and Prospects. In Proceedings of the 9th International Conference on Hybrid Intelligent Systems (HIS 2009), Shenyang, China, 12–14 August 2009; pp. 204–209. [Google Scholar]
- Bakhtiari, H.R.R.; Abdollahi, A.; Rezaeian, H. Semi Automatic Road Extraction from Digital Images. Egypt. J. Remote Sens. Space Sci. 2017, 20, 117–123. [Google Scholar] [CrossRef]
- Wang, P.; Wang, L.; Feng, X.; Xiao, P. Review of Road Extraction from Remote Sensing Images. Remote Sens. Technol. Appl. 2009, 24, 284–290. [Google Scholar] [CrossRef] [Green Version]
- Kahraman, I.; Karas, I.; Akay, A.E. Road Extraction Techniques from Remote Sensing Images: A Review. In Proceedings of the International Conference On Geomatic & Geospatial Technology (Ggt 2018): Geospatial And Disaster Risk Management; IOP: Kuala Lumpur, Malaysia, 2018. [Google Scholar]
- Liu, P.; Wang, Q.; Yang, G.; Li, L.; Zhang, H. Survey of Road Extraction Methods in Remote Sensing Images Based on Deep Learning. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2022, 90, 135–159. [Google Scholar] [CrossRef]
- Patil, D.; Jadhav, S. Road Extraction Techniques from Remote Sensing Images: A Review. Innov. Data Commun. Technol. Appl. 2021, 663–677. [Google Scholar]
- Wessel, B.; Wiedemann, C. Analysis of Automatic Road Extraction Results from Airborne Sar Imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2003, 34, 105–112. [Google Scholar]
- Cao, Y.; Wang, Z.; Shen, L.; Xiao, X.; Yang, L. Fusion of Pixel-Based and Object-Based Features for Road Centerline Extraction from High-Resolution Satellite Imagery. Acta Geod. Cartogr. Sin. 2016, 45, 1231–1240. [Google Scholar]
- Abdollahi, A.; Pradhan, B. Integrated Technique of Segmentation and Classification Methods with Connected Components Analysis for Road Extraction from Orthophoto Images. Expert Syst. Appl. 2021, 176, 114908. [Google Scholar] [CrossRef]
- Buslaev, A.; Seferbekov, S.; Iglovikov, V.; Shvets, A. Fully Convolutional Network for Automatic Road Extraction from Satellite Imagery. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 207–210. [Google Scholar]
- Lyu, Y.; Hu, X. Road Extraction by Incremental Markov Random Field Segmentation from High Spatial Resolution Remote Sensing Images. Remote Sens. Land Resour. 2018, 30, 76–82. [Google Scholar]
- Song, M.; Civco, D. Road Extraction Using Svm and Image Segmentation. Photogramm. Eng. Remote Sens. 2004, 70, 1365–1371. [Google Scholar] [CrossRef]
- Xu, Y.; Xie, Z.; Feng, Y.; Chen, Z. Road Extraction from High-Resolution Remote Sensing Imagery Using Deep Learning. Remote Sens. 2018, 10, 1461. [Google Scholar] [CrossRef]
- Maurya, R.; Gupta, P.; Shukla, A.S. Road Extraction Using K-Means Clustering and Morphological Operations. In Proceedings of the 2011 International Conference on Image Information Processing, Shimla, India, 3–5 November 2011; pp. 1–6. [Google Scholar]
- Jeon, B.K.; Jang, J.H.; Hong, K.S. Road Detection in Spaceborne Sar Images Using a Genetic Algorithm. IEEE Trans. Geosci. Remote Sens. 2002, 40, 22–29. [Google Scholar] [CrossRef]
- Jia, C.; Zhao, L.; Wu, Q.; Kuang, G. Automatic Road Extraction from Sar Imagery Based on Genetic Algorithm. J. Image Graph. 2008, 13, 1134–1142. [Google Scholar]
- Baumgartner, A.; Hinz, S. Multi-Scale Road Extraction Using Local and Global Grouping Criteria. Int. Arch. Photogramm. Remote Sens. 2000, 33, 58–65. [Google Scholar]
- Lin, X.; Jixian, Z.; Zhengjun, L. Semi-Automatic Extraction of Ribbon Road Form High Resolution Remotely Sensed Imagery by Improved Profile Matching Algorithm. Sci. Surv. Mapp. 2009, 34, 64–66, 126. [Google Scholar]
- Zhao, J.; Yang, J.; Li, P.; Deng, S.; Li, X.; Lu, J. Semi-Automatic Road Extraction from Sar Images Using an Improved Profile Matching and Ekf. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 1144–1150. [Google Scholar]
- Hu, X.Y.; Zhang, Z.X.; Tao, C.V. A Robust Method for Semi-Automatic Extraction of Road Centerlines Using a Piecewise Parabolic Model and Least Square Template Matching. Photogramm. Eng. Remote Sens. 2004, 70, 1393–1398. [Google Scholar] [CrossRef]
- Chen, G.; Sui, H.; Tu, J.; Song, Z. Semi-Automatic Road Extraction Method from High Resolution Remote Sensing Images Based on P-N Learning. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 775–781. [Google Scholar]
- Kim, T.J.; Park, S.R.; Kim, M.G.; Jeong, S.; Kim, K.O. Tracking Road Centerlines from High Resolution Remote Sensing Images by Least Squares Correlation Matching. Photogramm. Eng. Remote Sens. 2004, 70, 1417–1422. [Google Scholar] [CrossRef]
- Lin, X.; Zhang, J.; Liu, Z.; Shen, J. Semi-Automatic Extraction of Ribbon Roads from High Resolution Remotely Sensed Imagery by T-Shaped Template Matching. In Proceedings of the Geoinformatics 2008 and Joint Conference on GIS and Built Environment: Classification of Remote Sensing Images, SPIE, Guangzhou, China, 28–29 June 2008; p. 71470J. [Google Scholar]
- Vosselman, G.; Knecht, J.D. Road Tracing by Profile Matching and Kaiman Filtering. In Automatic Extraction of Man-Made Objects from Aerial and Space Images; Springer: Berlin, Germany, 1995; pp. 265–274. [Google Scholar]
- Zhang, Q.; Couloigner, I. Benefit of the Angular Texture Signature for the Separation of Parking Lots and Roads on High Resolution Multi-Spectral Imagery. Pattern Recognit. Lett. 2005, 27, 937–946. [Google Scholar] [CrossRef]
- Lotte, R.G.; Sant’Anna, S.J.S.; Almeida, C.M. Roads Centre-Axis Extraction in Airborne Sar Images: An Approach Based on Active Contour Model with the Use of Semi-Automatic Seeding. In Proceedings of the International Society for Photogrammetry and Remote Sensing Hannover Workshop, Hannover, Germany, 21–24 May 2013; pp. 207–212. [Google Scholar]
- Cheng, J.; Gao, G.; Ku, X.; Sun, J. Review of Road Network Extraction from Sar Images. J. Image Graph. 2013, 18, 11–23. [Google Scholar]
- Zhou, Y.; Cheng, J.; Liu, T.; Wang, Y.; Chen, M. Review of Road Extraction for High-Resolution Sar Images. Comput. Sci. 2020, 47, 124–135. [Google Scholar]
- Jonietz, D.; Zipf, A. Defining Fitness-for-Use for Crowdsourced Points of Interest (Poi). ISPRS Int. J. Geo-Inf. 2016, 5, 149. [Google Scholar] [CrossRef]
- Lu, H.C.; Chen, H.S.; Tseng, V.S. An Efficient Framework for Multirequest Route Planning in Urban Environments. IEEE Trans. Intell. Transp. Syst. 2017, 18, 869–879. [Google Scholar] [CrossRef]
- Yang, S.; Shen, J.; Konecny, M.; Wang, Y.; Stampach, R. Study on the Spatial Heterogeneity of the Poi Quality in Openstreetmap. In Proceedings of the 7th International Conference on Cartography and GIS, Sozopol, Bulgaria, 18–23 June 2018; pp. 286–295. [Google Scholar]
- Chang, S.; Wang, Z.; Mao, D.; Liu, F.; Lai, L.; Yu, H. Identifying Urban Functional Areas in China’s Changchun City from Sentinel-2 Images and Social Sensing Data. Remote Sens. 2021, 13, 4512. [Google Scholar] [CrossRef]
- Zheng, S.; Zheng, J. Assessing the Completeness and Positional Accuracy of Openstreetmap in China. In Thematic Cartography for the Society; Springer: Berlin, Germany, 2014; pp. 171–189. [Google Scholar]
- Haverkamp, D. Extracting Straight Road Structure in Urban Environments Using Ikonos Satellite Imagery. Opt. Eng. 2002, 41, 2107–2110. [Google Scholar] [CrossRef]
- Rui, Z.; Jixian, Z.; Haitao, L.I. Semi-Automatic Extraction of Ribbon Roads from High Resolution Remotely Sensed Imagery Based on Angular Texture Signature and Profile Match. J. Remote Sens. 2008, 12, 224–232. [Google Scholar]
- Lin, X.; Tian, L.; Wang, J.; Zhu, X.; Li, K. Extraction of Ribbon Roads from High-Resolution Remotely Sensed Imagery with Improved Angular Texture Signature. Sci. Surv. Mapp. 2015, 40, 55–59. [Google Scholar]
- Zhou, J.; Bischof, W.F.; Caelli, T. Road Tracking in Aerial Images Based on Human–Computer Interaction and Bayesian Filtering. ISPRS J. Photogramm. Remote Sens. 2006, 61, 108–124. [Google Scholar] [CrossRef]
- Tupin, F.; Houshmand, B.; Datcu, M. Road Detection in Dense Urban Areas Using Sar Imagery and the Usefulness of Multiple Views. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2405–2414. [Google Scholar] [CrossRef]
- Xiao, F.; Tong, L.; Luo, S. A Method for Road Network Extraction from High-Resolution Sar Imagery Using Direction Grouping and Curve Fitting. Remote Sens. 2019, 11, 2733. [Google Scholar] [CrossRef]
- He, W.; Song, H.; Yao, Y.; Jia, X. A Multiscale Method for Road Network Extraction from High-Resolution Sar Images Based on Directional Decomposition and Regional Quality Evaluation. Remote Sens. 2021, 13, 1476. [Google Scholar] [CrossRef]
- Jia, C.L.; Ji, K.F.; Jiang, Y.M.; Kuang, G.Y. Road Extraction from High-Resolution Sar Imagery Using Hough Transform. In Proceedings of the 25th IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2005), Seoul, Korea, 25–29 July 2005; pp. 336–339. [Google Scholar]
- Fantasy, L. (lostFantasy1996) Road Extraction from Sar Image. November 2014. Available online: https://github.com/CityU-HAN/graduation-project (accessed on 1 September 2022).
- Movaghati, S.; Moghaddamjoo, A.; Tavakoli, A. Road Extraction from Satellite Images Using Particle Filtering and Extended Kalman Filtering. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2807–2817. [Google Scholar] [CrossRef]
- Pourghasemy, S. Fully Automatic Road Extraction from Sar Imagery with Bayesian Filter. March 2020. Available online: https://github.com/saeed85416009/Matlab-RoadExtraction-SAR-BayesianFilter (accessed on 1 September 2022).
- Achanta, S.T. Road Extraction from High Resolution Satellite Image. December 2017. Available online: https://github.com/VIRUS-ATTACK/Road-extraction-from-satellite-images (accessed on 1 September 2022).
- Lin, X.; Zhang, J.; Liu, Z.; Shen, J.; Duan, M. Semi-Automatic Extraction of Road Networks by Least Squares Interlaced Template Matching in Urban Areas. Int. J. Remote Sens. 2011, 32, 4943–4959. [Google Scholar] [CrossRef]
- Fu, G.; Zhao, H.; Li, C.; Shi, L. A Method by Improved Circular Projection Matching of Tracking Twisty Road from Remote Sensing Imagery. Acta Geod. Cartogr. Sin. 2014, 43, 724–730, 738. [Google Scholar]
- Fu, G.; Zhao, H.; Li, C.; Shi, L. Road Detection from Optical Remote Sensing Imagery Using Circular Projection Matching and Tracking Strategy. J. Indian Soc. Remote Sens. 2013, 41, 819–831. [Google Scholar] [CrossRef]
- Lou, G.; Chen, Q.; He, K.; Zhou, Y.; Shi, Z. Using Nighttime Light Data and Poi Big Data to Detect the Urban Centers of Hangzhou. Remote Sens. 2019, 11, 1821. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Yang, B.; Luan, X. Integrating Urban Poi and Road Networks Based on Semantic Knowledge. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 1229–1233. [Google Scholar]
- Arai, K.; Wang, J. Polarimetric Sar Image Classification with the Maximum Curvature of the Trajectory in the Eigen Space Converted from the Polarization Signature. Adv. Space Res. 2007, 39, 149–154. [Google Scholar] [CrossRef]
- Xiang, H.; Liu, S.; Zhuang, Z.; Zhang, N. A Classification Algorithm Based on Cloude Decomposition Model for Fully Polarimetric Sar Image. In Proceedings of the 6th Digital Earth Summit, Beijing, China, 7–8 July 2016. [Google Scholar]
- Mahdianpari, M.; Mohammadimanesh, F.; McNairn, H.; Davidson, A.; Rezaee, M.; Salehi, B.; Homayouni, S. Mid-Season Crop Classification Using Dual-, Compact-, and Full-Polarization in Preparation for the Radarsat Constellation Mission (Rcm). Remote Sens. 2019, 11, 1582. [Google Scholar] [CrossRef]
- Perissin, D.; Ferretti, A. Urban-Target Recognition by Means of Repeated Spaceborne Sar Images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 4043–4058. [Google Scholar] [CrossRef]
- Sun, N.; Zhang, J.; Huang, G.; Zhao, Z. A Semi-Automatic Extraction of Ribbon Roads from Sar Image. Sci. Surv. Mapp. 2014, 39, 7. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Location | Range Dimension (m) | Azimuth Dimension (m) | Level-1 Resolution (m) | Image Width (km) | Selected Image Scope (Pixels) |
|---|---|---|---|---|---|---|
| Area-I | Qingpu | 0.36 | 0.56 | 1 | 10 | 1643 × 1637 |
| Area-II | Jiading | 0.36 | 0.56 | 1 | 10 | 911 × 1517 |
| Area-III | Qingpu | 0.36 | 0.56 | 1 | 10 | 875 × 1342 |
| Name | Intersection Number | Original Number | Remained Number | Used | Intersection Detail |
|---|---|---|---|---|---|
| Area-I | 4 | 16 | 12 | 4 | 4 tic-tac-toes |
| Area-II | 2 | 7 | 6 | 2 | 2 triples |
| Area-III | 3 | 14 | 14 | 3 | 2 tic-tac-toes and 1 triple |
| ID | Parameter | Value | Section |
|---|---|---|---|
| 1 | Image segmentation threshold | 0.16 | Section 2.2.1 |
| 2 | Offset angle (β) for linking POIs | 30° | Section 2.2.2 (Figure 2b) |
| 3 | Crossover angle (α) for linking POIs | 60° | Section 2.2.2 (Figure 2b) |
| 4 | RadI (R) of the widened POI linkages | 5 m | Section 2.2.2 |
| 5 | The coefficient (weight; ) of the grayscale mean | 1 | Section 2.3.2 |
| 6 | The coefficient (weight; ) of the grayscale variance | 1 | Section 2.3.2 |
| 7 | The coefficient (weight; ) of the pixel sum of the binary segmentation image | 1 | Section 2.3.2 |
| 8 | An angle for determining the direction of the road at a new road intersection | 50° to 130° | Section 2.3.3 (Figure 5a) |
| 9 | Threshold for the difference of the mean of grayscales of SAR images between two adjacent sliding windows | 0.05 | Section 2.3.4 |
| 10 | The distance threshold for comparing the extracted results and the actual results | 6.5 m | Section 2.4 |
| Road | Total Point Pairs (Line Segments) | Total Incorrect Points | Maximum Distance (m) | Minimum Distance (m) | Average Distance (m) | Standard Deviation (m) |
|---|---|---|---|---|---|---|
| Road-1 | 78 | 10 | 6.420 | 0.021 | 2.174 | 1.746 |
| Road-2 | 79 | 1 | 6.082 | 0.074 | 2.021 | 1.715 |
| Road-3 | 50 | 0 | 6.030 | 0.014 | 1.466 | 1.357 |
| Road-4 | 71 | 18 | 6.316 | 0.045 | 2.916 | 1.847 |
| All roads | 278 | 29 | 6.420 | 0.014 | 2.142 | 1.753 |
| Area | Road | Total Point Pairs (Line Segments) | Total Incorrect Points | Maximum Distance (m) | Minimum Distance (m) | Average Distance (m) | Standard Deviation (m) |
|---|---|---|---|---|---|---|---|
| Area-II | Road-1 | 55 | 3 | 6.206 | 0.009 | 2.171 | 1.786 |
| Road-2 | 16 | 0 | 5.577 | 0.020 | 2.385 | 1.684 | |
| Road-3 | 25 | 0 | 5.877 | 0.343 | 3.273 | 1.362 | |
| All roads | 96 | 3 | 6.206 | 0.009 | 2.504 | 1.730 | |
| Area-III | Road-1 | 54 | 1 | 3.370 | 0 | 0.956 | 0.684 |
| Road-2 | 34 | 2 | 4.441 | 0.013 | 1.431 | 1.078 | |
| Road-3 | 33 | 6 | 6.433 | 0.044 | 2.095 | 1.719 | |
| Road-4 | 15 | 1 | 3.086 | 0.002 | 0.888 | 0.824 | |
| All roads | 136 | 10 | 6.433 | 0 | 1.313 | 1.187 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, N.; Feng, Y.; Tong, X.; Lei, Z.; Chen, S.; Wang, C.; Xu, X.; Jin, Y. Road Network Extraction from SAR Images with the Support of Angular Texture Signature and POIs. Remote Sens. 2022, 14, 4832. https://doi.org/10.3390/rs14194832
Sun N, Feng Y, Tong X, Lei Z, Chen S, Wang C, Xu X, Jin Y. Road Network Extraction from SAR Images with the Support of Angular Texture Signature and POIs. Remote Sensing. 2022; 14(19):4832. https://doi.org/10.3390/rs14194832
Chicago/Turabian StyleSun, Na, Yongjiu Feng, Xiaohua Tong, Zhenkun Lei, Shurui Chen, Chao Wang, Xiong Xu, and Yanmin Jin. 2022. "Road Network Extraction from SAR Images with the Support of Angular Texture Signature and POIs" Remote Sensing 14, no. 19: 4832. https://doi.org/10.3390/rs14194832
APA StyleSun, N., Feng, Y., Tong, X., Lei, Z., Chen, S., Wang, C., Xu, X., & Jin, Y. (2022). Road Network Extraction from SAR Images with the Support of Angular Texture Signature and POIs. Remote Sensing, 14(19), 4832. https://doi.org/10.3390/rs14194832