



ELCD: Efficient Lunar Crater Detection Based on Attention Mechanisms and Multiscale Feature Fusion Networks from Digital Elevation Models


Abstract
:1. Introduction
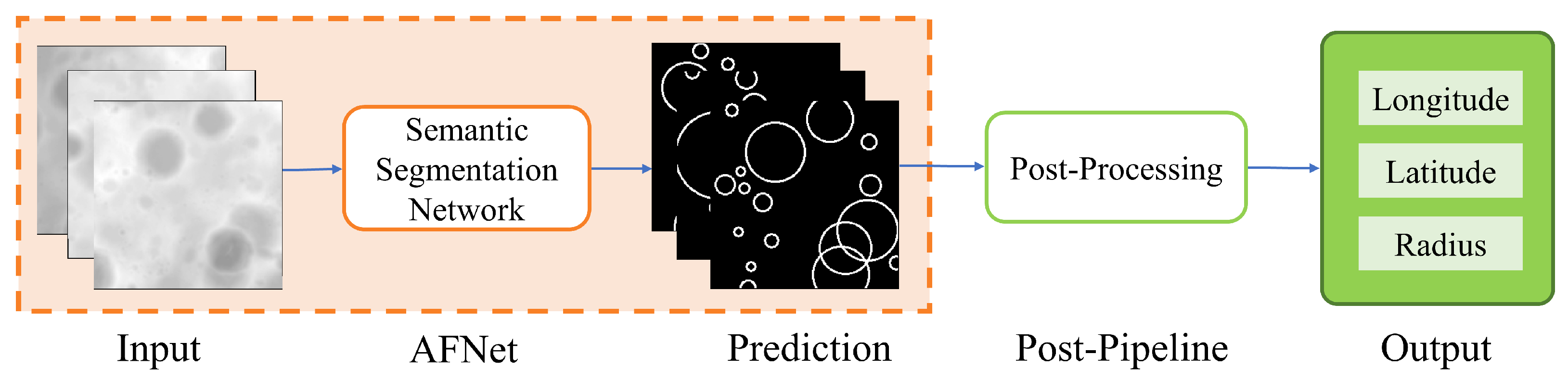
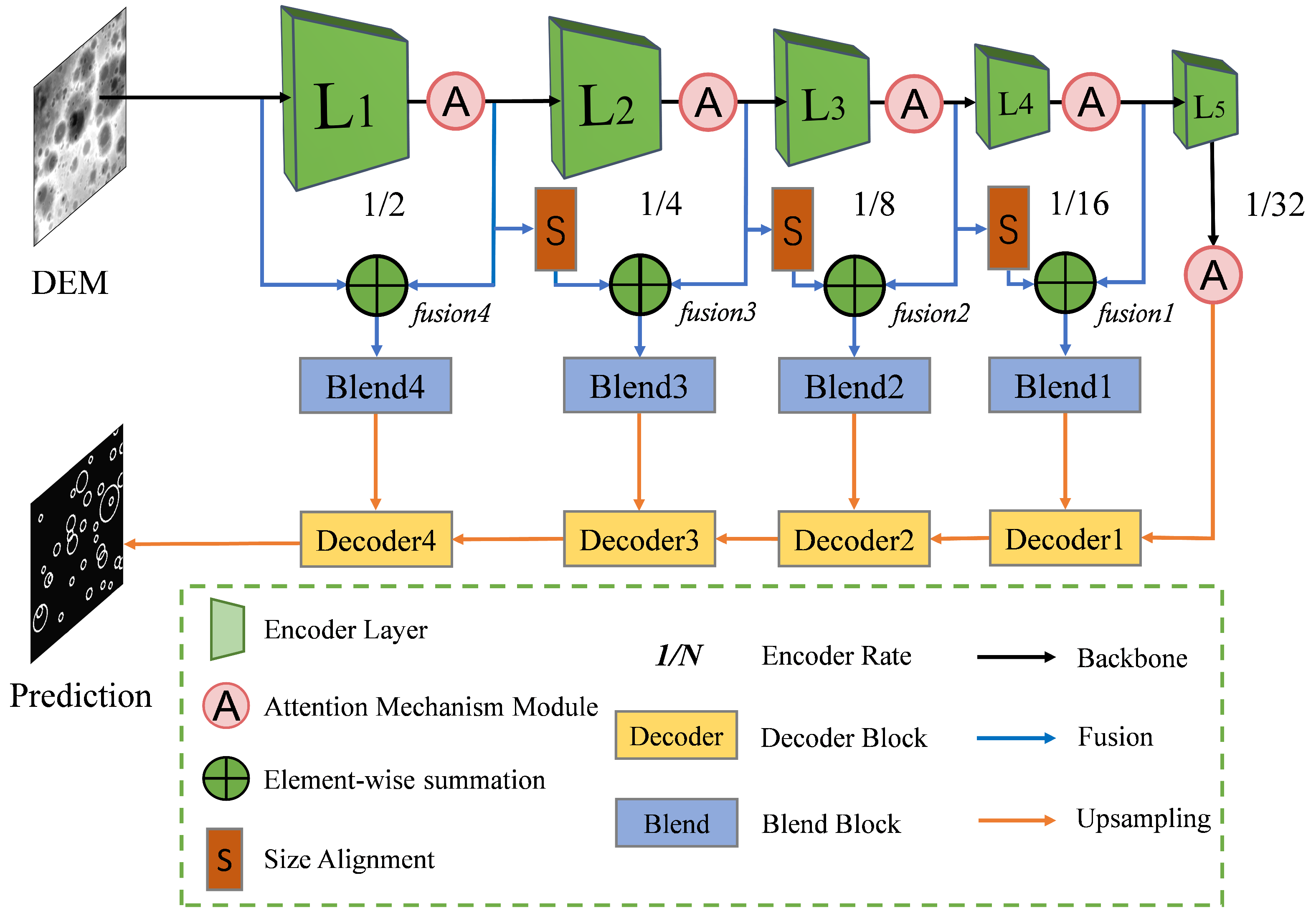
- We propose an efficient crater detection network based on a new semantic segmentation network architecture, AFNet, which uses the lightweight attention mechanism and multiscale feature fusion module to provide better and faster detection of lunar impact craters.
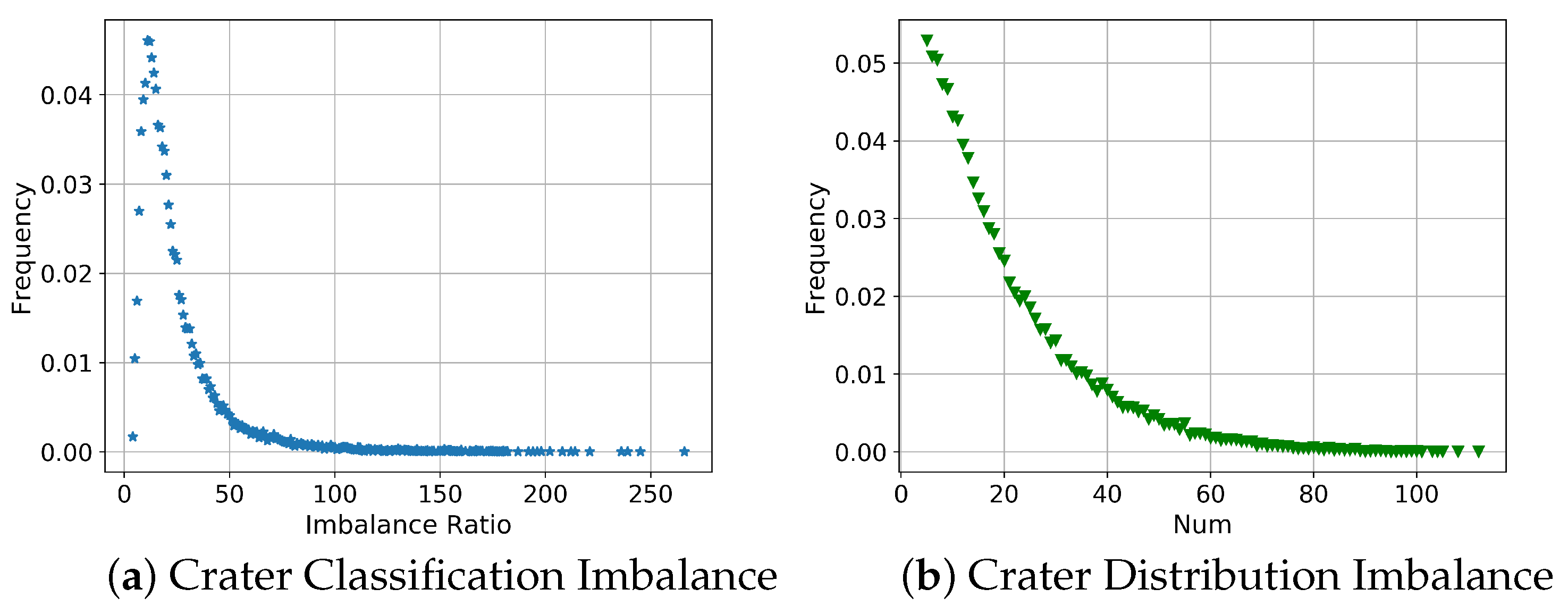
- To improve the optimization capability of the network, we present the crater edge segmentation loss function, which considers the imbalance of classification and distributions of crater data to calculate the loss value using the different degrees of imbalance in the data.
- The experiment is conducted on the PyTorch platform [41] with lunar DEM data to verify the effectiveness of the ELCD. The results show that the ELCD outperforms the state-of-the-art crater detection models in terms of its detection accuracy and inference speed.
2. Materials and Methods
2.1. AFNet
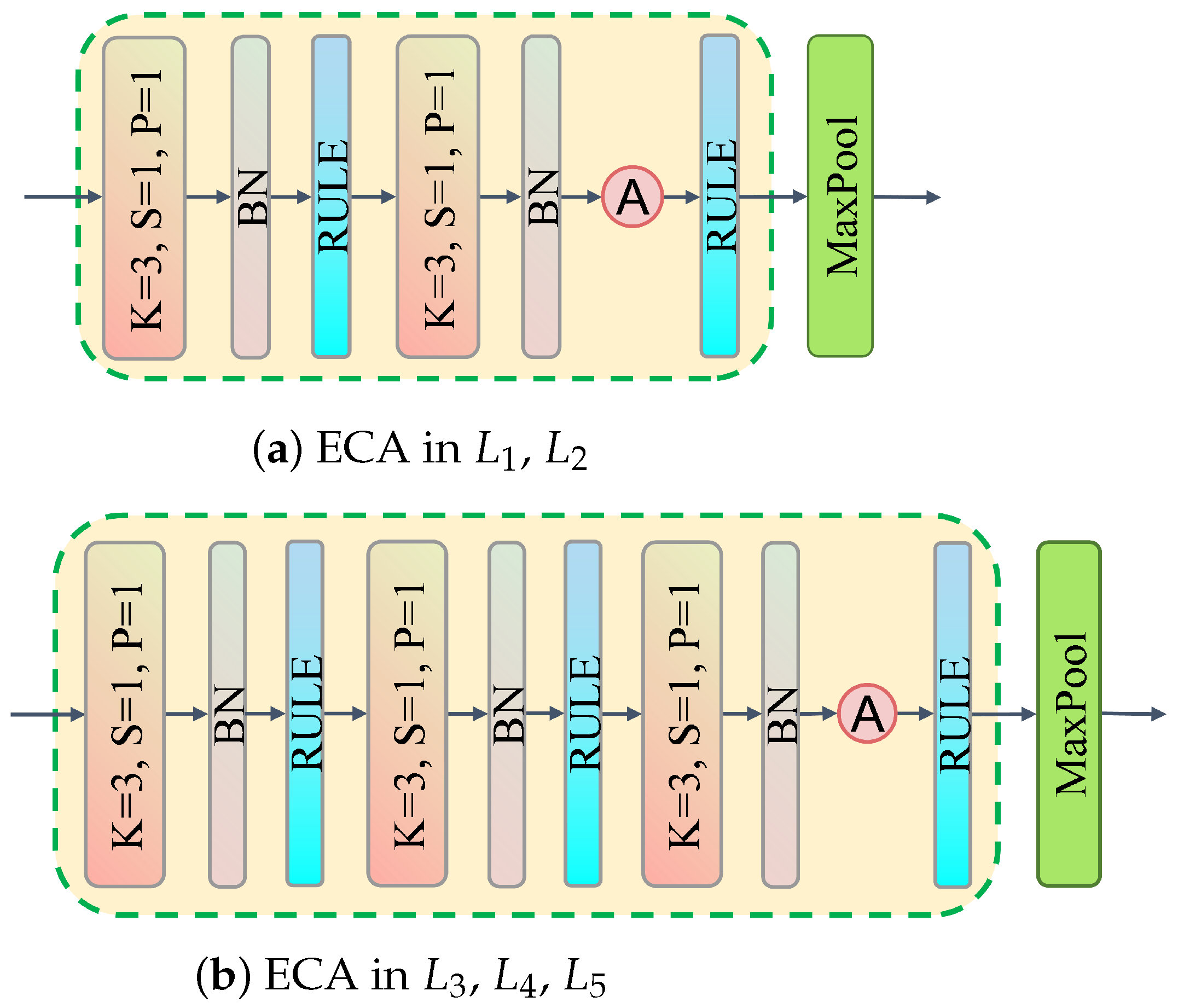
2.2. Attention Mechanism Module
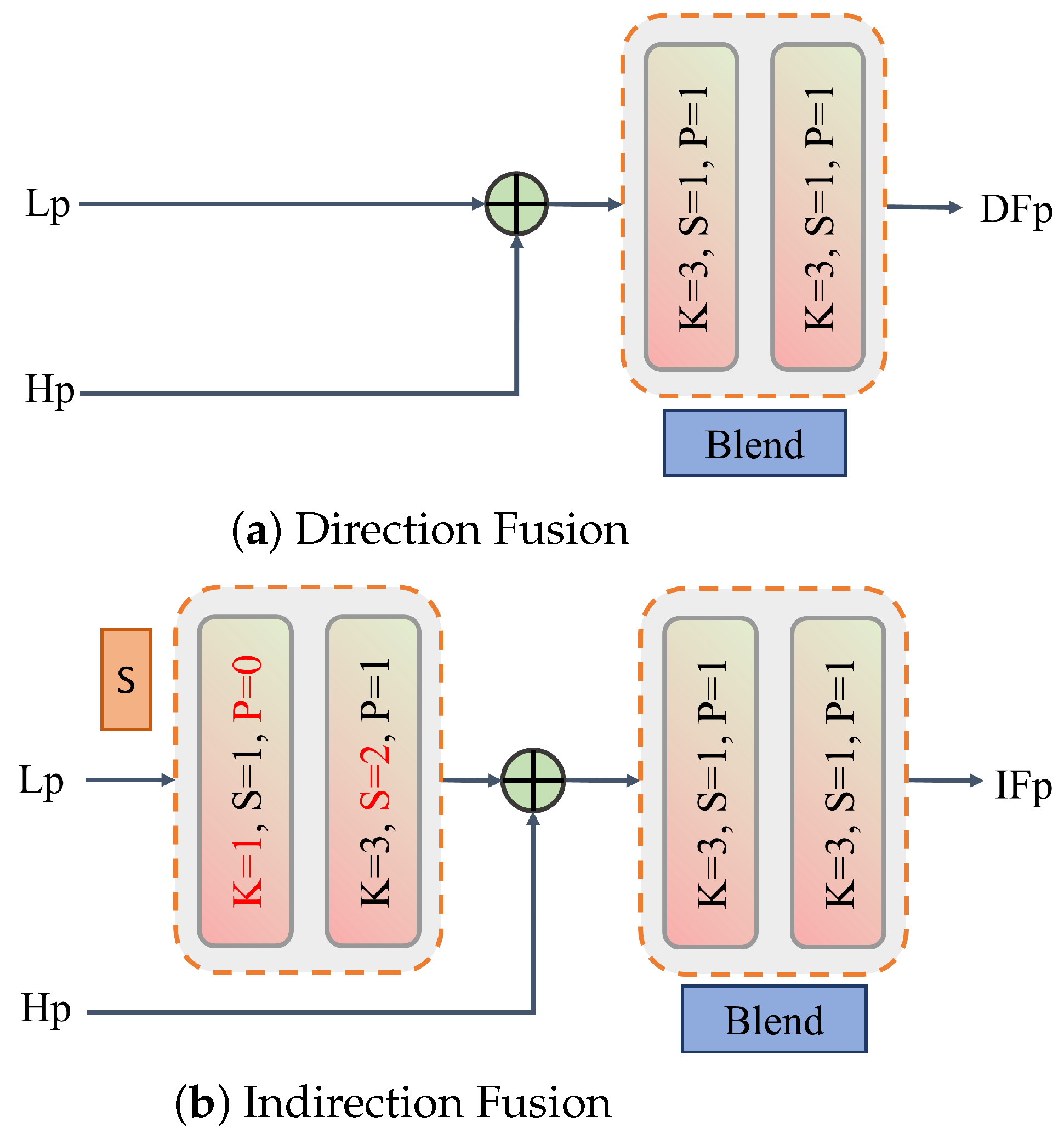
2.3. Multiscale Feature Fusion Module
2.4. Crater Edge Segmentation Loss Function
2.5. Crater Extraction Algorithm
| Algorithm 1: Efficient Lunar Crater Detection Algorithm |
 |
2.6. Experiments
2.6.1. Experimental Setup
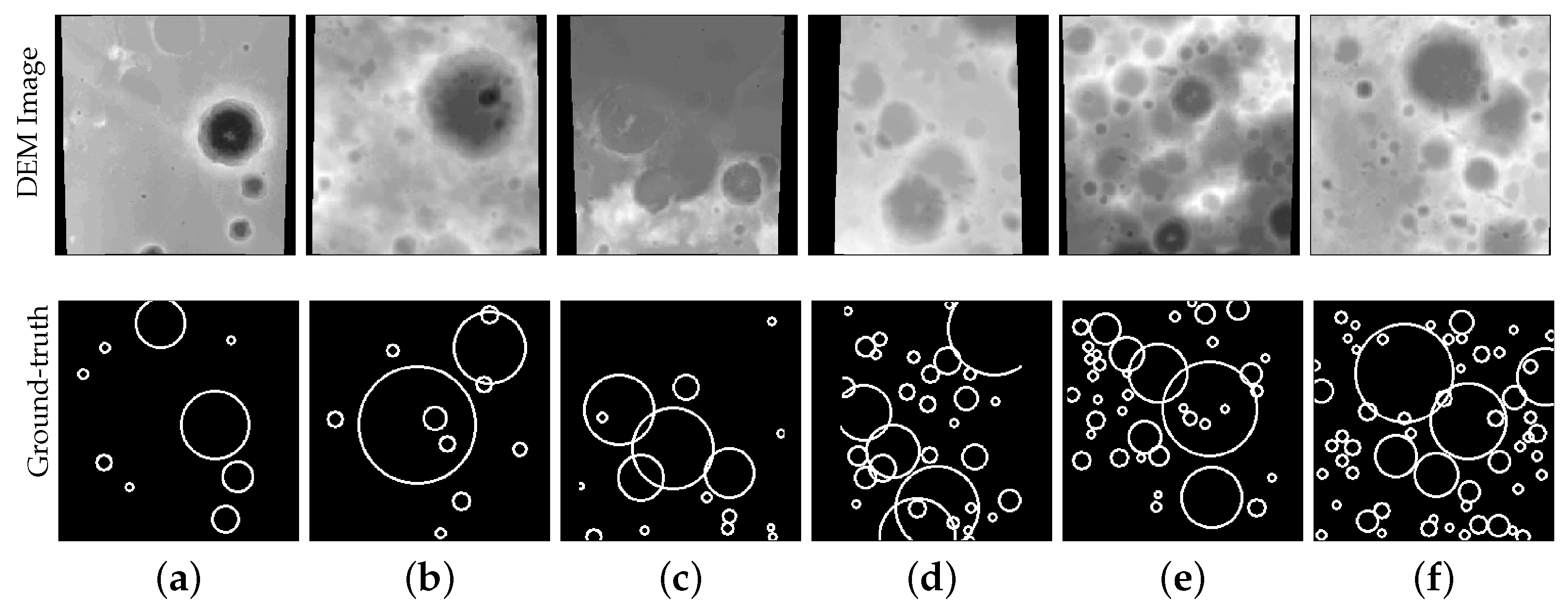
2.6.2. Datasets
2.6.3. Evaluation Criteria
2.6.4. Compared Algorithms
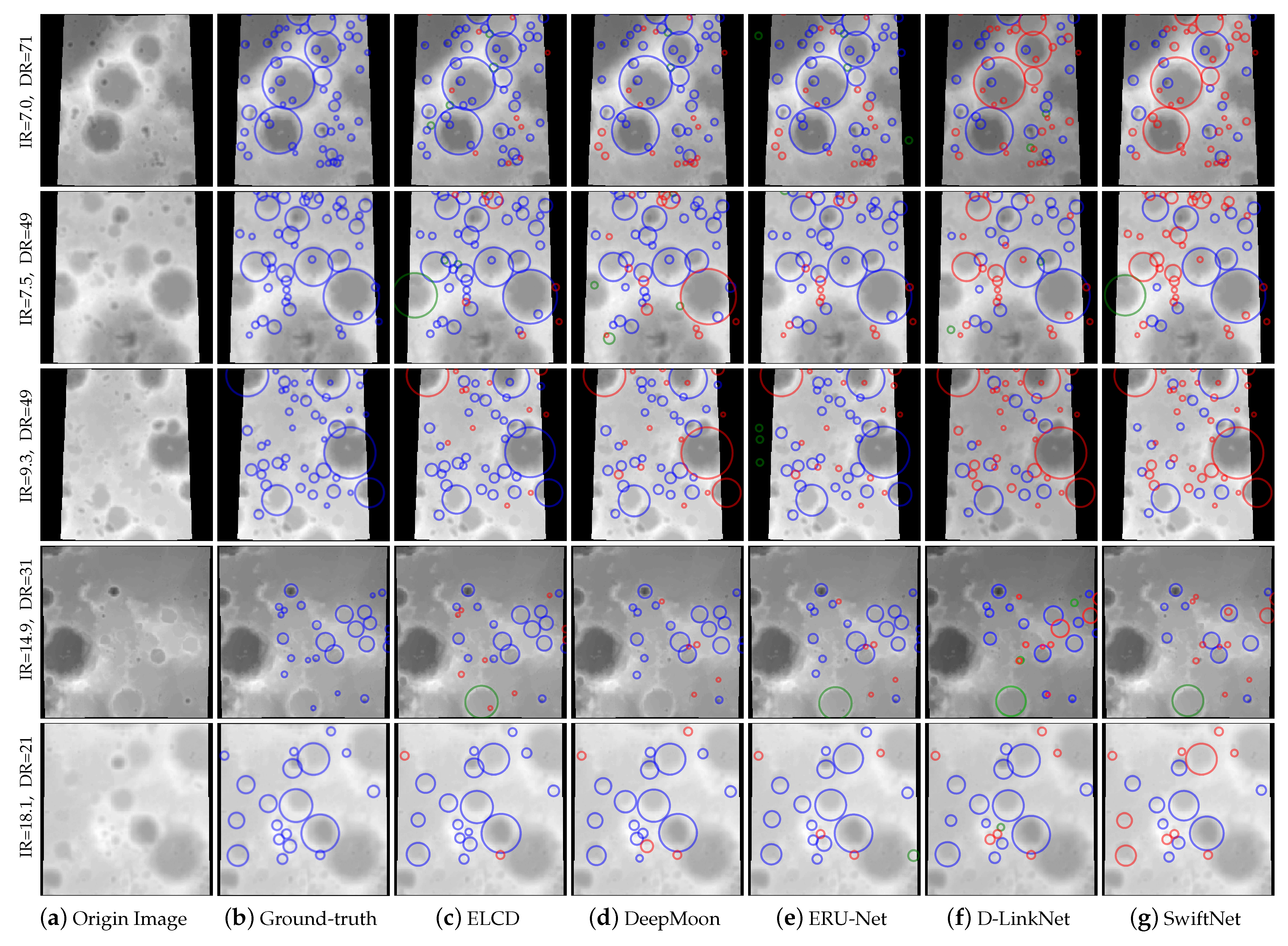
- DeepMoon [35]: The basic idea of this algorithm is that deep learning based on the U-net network architecture is used to train the lunar crater DEM data to discover lunar craters.
- ERU-Net [36]: To improve the detection accuracy of lunar craters, ERU-Net introduced the residual network module to the U-Net network architecture to enhance the crater feature extraction ability.
- D-LinkNet [23]: D-LinkNet with high efficiency is often used for comparisons in crater detection. D-LinkNet is a semantic segmentation neural network that combines the encoder–decoder structure, dilated convolution, and a pre-trained encoder to carry out road extraction tasks.
- SwiftNet [24]: To verify the inference speed of the proposed model, we added SwiftNet to compare the network models. SwiftNet is a real-time semantic segmentation method based on residual network frameworks, which can achieve real-time detection for road-driving images.
3. Results
3.1. Ablation Study
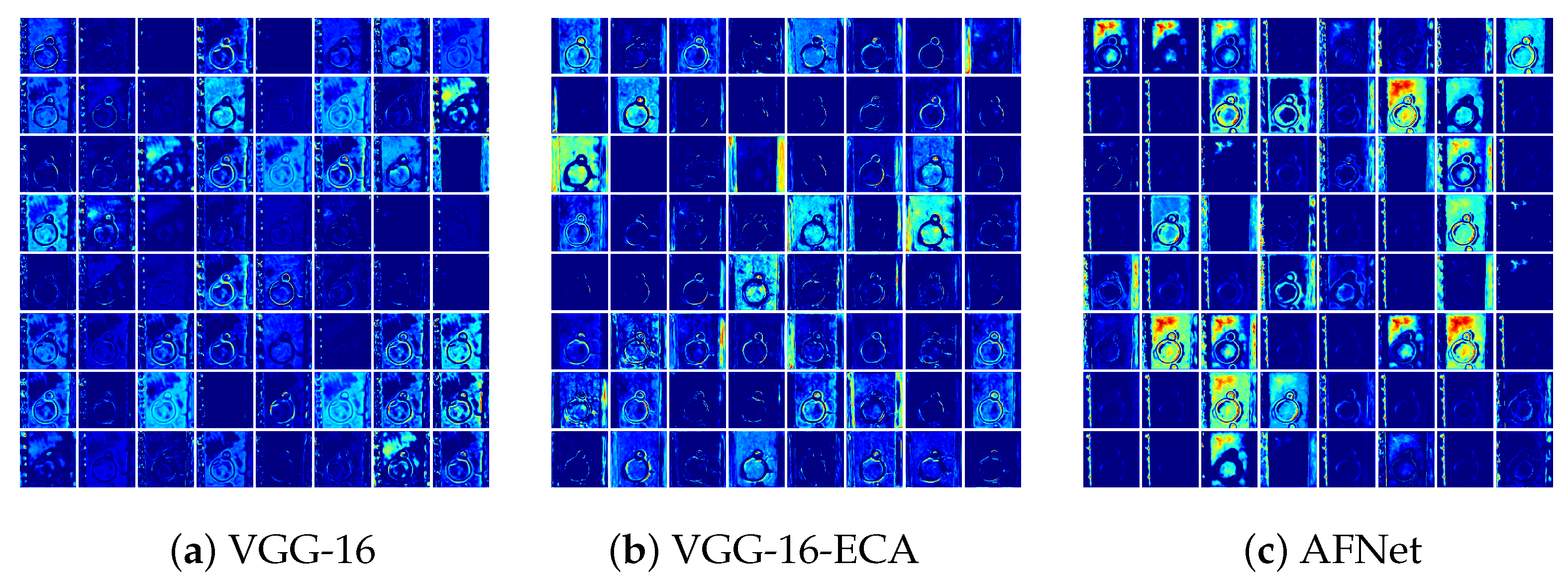
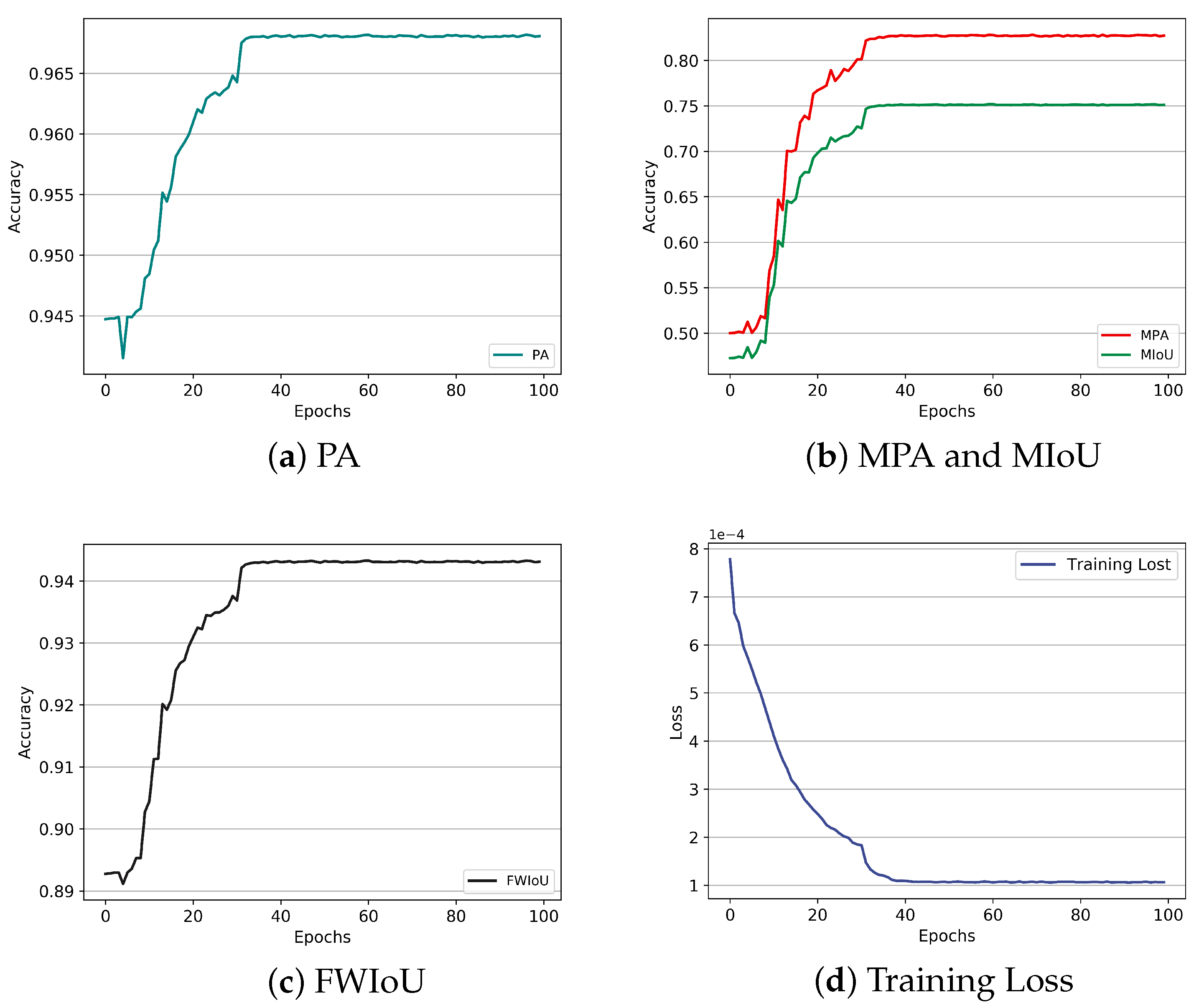
3.2. The Evaluation Results for AFNet
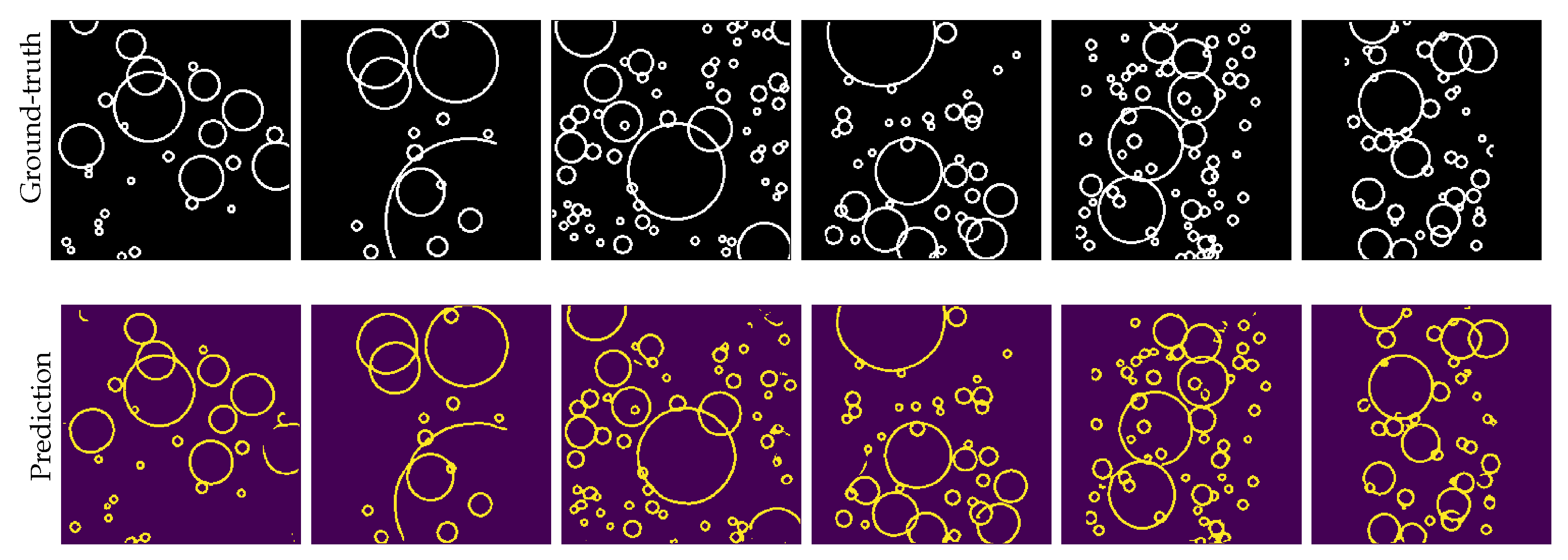
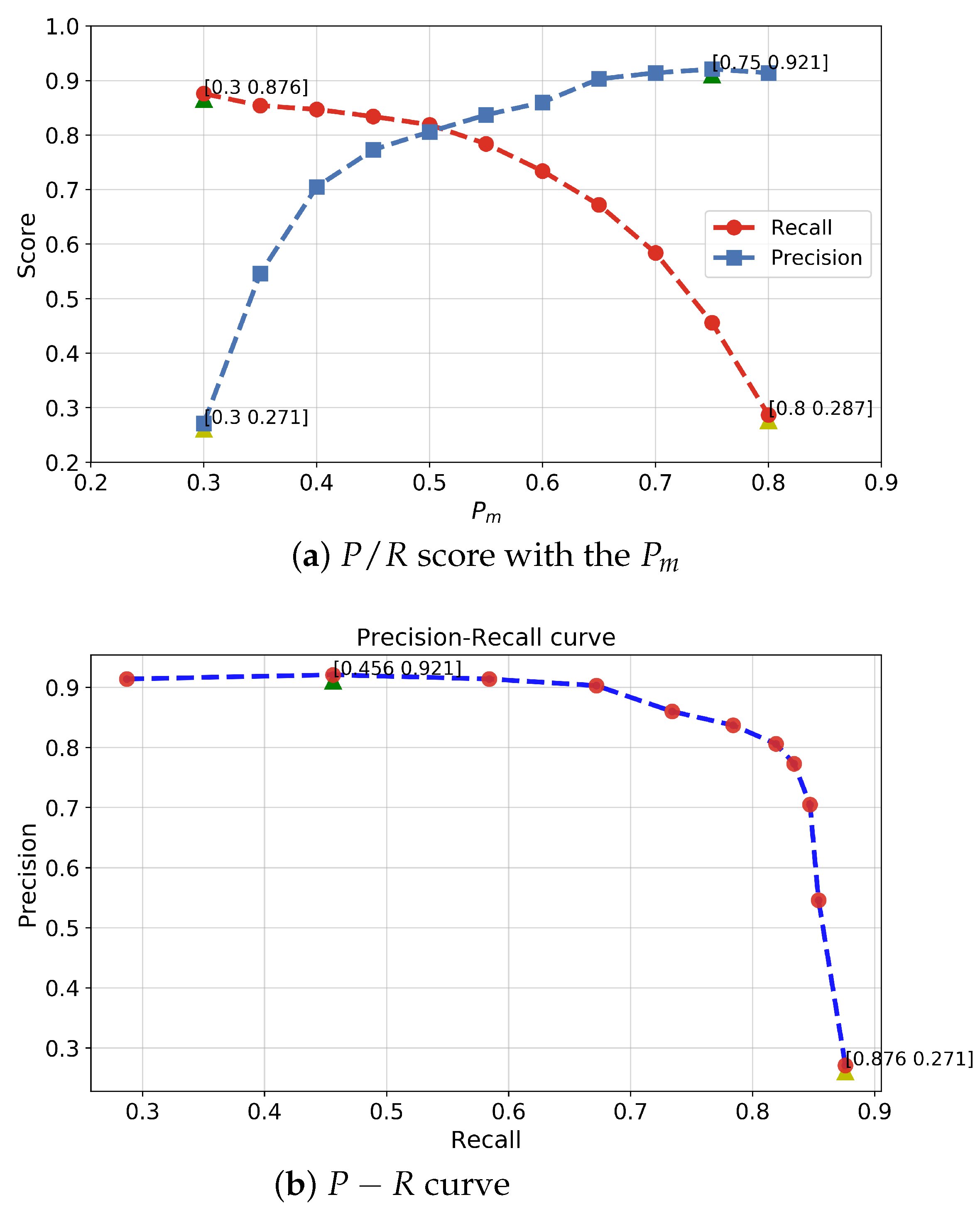
3.3. The Evaluation Results for the ELCD
3.4. Comparison of Multiple Crater Detection Methods
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ELCD | Efficient lunar crater detection |
| DEM | Digital elevation model |
| CNNs | Convolution neural networks |
| SAR | Synthetic aperture radar |
| AFNet | Attention mechanisms and multiscale feature fusion networks |
| CESL | Crater edge segmentation loss |
| CEA | Crater extraction algorithm |
| MFF | Multiscale feature fusion |
| VGG-16 | Visual geometry group-16 |
| ECA | Efficient channel attention |
| IR | Data imbalance ratio |
| DR | Distribution imbalance ratio |
| CE | Cross-entropy |
| FL | Focal loss |
| LRO | Lunar reconnaissance orbiter |
| PA | Pixel accuracy |
| MPA | Mean pixel accuracy |
| MIoU | Mean intersection over union |
| FWIoU | Frequency weighted intersection over union |
| FLOPs | Floating-point operations |
| FPS | Frames per second |
| P | Precision |
| R | Recall |
References
- Strom, R.; Malhotra, R.; Ito, T.; Yoshida, F.; Kring, D. Origin of Impacting Objects in the Inner Solar System. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 5–9 December 2005; Volume 2005, p. P42A-01. [Google Scholar]
- Schmidt, M.W.; Kraettli, G. Experimental Crystallization of the Lunar Magma Ocean, Initial Selenotherm and Density Stratification, and Implications for Crust Formation, Overturn and the Bulk Silicate Moon Composition. J. Geophys. Res. (Planets) 2022, 127, e07187. [Google Scholar] [CrossRef]
- Bottke, W.F.; Norman, M.D. The late heavy bombardment. Annu. Rev. Earth Planet. Sci. 2017, 45, 619–647. [Google Scholar] [CrossRef] [Green Version]
- Kereszturi, A.; Steinmann, V. Terra-mare comparison of small young craters on the Moon. Icarus 2019, 322, 54–68. [Google Scholar] [CrossRef]
- Xu, L.; Qiao, L.; Xie, M.; Wu, Y. Formation age of lunar Lalande crater and its implications for the source region of the KREEP-rich meteorite Sayh al Uhaymir 169. Icarus 2022, 386, 115166. [Google Scholar] [CrossRef]
- Martin, I.; Parkes, S.; Dunstan, M. Modeling cratered surfaces with real and synthetic terrain for testing planetary landers. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2916–2928. [Google Scholar] [CrossRef] [Green Version]
- Song, J.; Rondao, D.; Aouf, N. Deep learning-based spacecraft relative navigation methods: A survey. Acta Astronaut. 2022, 191, 22–40. [Google Scholar] [CrossRef]
- Kereszturi, A.; Tomka, R.; Steinmann, V. Testing statistical impact crater analysis in permanently shadowed lunar polar regions. Icarus 2022, 376, 114879. [Google Scholar] [CrossRef]
- Povilaitis, R.; Robinson, M.; Van der Bogert, C.; Hiesinger, H.; Meyer, H.; Ostrach, L. Crater density differences: Exploring regional resurfacing, secondary crater populations, and crater saturation equilibrium on the moon. Planet. Space Sci. 2018, 162, 41–51. [Google Scholar] [CrossRef]
- Head III, J.W.; Fassett, C.I.; Kadish, S.J.; Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Mazarico, E. Global distribution of large lunar craters: Implications for resurfacing and impactor populations. Science 2010, 329, 1504–1507. [Google Scholar] [CrossRef]
- Troglio, G.; Le Moigne, J.; Benediktsson, J.A.; Moser, G.; Serpico, S.B. Automatic extraction of ellipsoidal features for planetary image registration. IEEE Geosci. Remote Sens. Lett. 2011, 9, 95–99. [Google Scholar] [CrossRef]
- Galloway, M.J.; Benedix, G.K.; Bland, P.A.; Paxman, J.; Towner, M.C.; Tan, T. Automated crater detection and counting using the Hough transform. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 1579–1583. [Google Scholar]
- Di, K.; Li, W.; Yue, Z.; Sun, Y.; Liu, Y. A machine learning approach to crater detection from topographic data. Adv. Space Res. 2014, 54, 2419–2429. [Google Scholar] [CrossRef]
- Bandeira, L.; Saraiva, J.; Pina, P. Impact crater recognition on Mars based on a probability volume created by template matching. IEEE Trans. Geosci. Remote Sens. 2007, 45, 4008–4015. [Google Scholar] [CrossRef]
- Emami, E.; Bebis, G.; Nefian, A.; Fong, T. Automatic crater detection using convex grouping and convolutional neural networks. In Proceedings of the International Symposium on Visual Computing, Las Vegas, NV, USA, 14–16 December 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 213–224. [Google Scholar]
- He, J.; Cui, H.; Feng, J. Edge information based crater detection and matching for lunar exploration. In Proceedings of the 2010 International Conference on Intelligent Control and Information Processing, Dalian, China, 13–15 August 2010; IEEE: Hoboken, NJ, USA, 2010; pp. 302–307. [Google Scholar]
- Chen, M.; Liu, D.; Qian, K.; Li, J.; Lei, M.; Zhou, Y. Lunar crater detection based on terrain analysis and mathematical morphology methods using digital elevation models. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3681–3692. [Google Scholar] [CrossRef]
- Barata, T.; Alves, E.I.; Saraiva, J.; Pina, P. Automatic recognition of impact craters on the surface of Mars. In Proceedings of the International Conference Image Analysis and Recognition, Porto, Portugal, 29 September–1 October 2004; Springer: Berlin/Heidelberg, Germany, 2004; pp. 489–496. [Google Scholar]
- Urbach, E.R.; Stepinski, T.F. Automatic detection of sub-km craters in high resolution planetary images. Planet. Space Sci. 2009, 57, 880–887. [Google Scholar] [CrossRef]
- Salamunićcar, G.; Lončarić, S. Application of machine learning using support vector machines for crater detection from Martian digital topography data. 38th COSPAR Sci. Assem. 2010, 38, 3. [Google Scholar]
- Kang, Z.; Wang, X.; Hu, T.; Yang, J. Coarse-to-fine extraction of small-scale lunar impact craters from the CCD images of the Chang’E lunar orbiters. IEEE Trans. Geosci. Remote Sens. 2018, 57, 181–193. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, B. Active machine learning approach for crater detection from planetary imagery and digital elevation models. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5777–5789. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, C.; Wu, M. D-LinkNet: LinkNet with pretrained encoder and dilated convolution for high resolution satellite imagery road extraction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 182–186. [Google Scholar]
- Orsic, M.; Kreso, I.; Bevandic, P.; Segvic, S. In defense of pre-trained imagenet architectures for real-time semantic segmentation of road-driving images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–17 June 2019; pp. 12607–12616. [Google Scholar]
- Li, Y.; Du, L.; Wei, D. Multiscale CNN based on component analysis for SAR ATR. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–12. [Google Scholar] [CrossRef]
- Liao, L.; Du, L.; Guo, Y. Semi-supervised SAR target detection based on an improved faster R-CNN. Remote Sens. 2021, 14, 143. [Google Scholar] [CrossRef]
- DeLatte, D.; Crites, S.T.; Guttenberg, N.; Yairi, T. Automated crater detection algorithms from a machine learning perspective in the convolutional neural network era. Adv. Space Res. 2019, 64, 1615–1628. [Google Scholar] [CrossRef]
- Downes, L.M.; Steiner, T.J.; How, J.P. Neural Network Approach to Crater Detection for Lunar Terrain Relative Navigation. J. Aerosp. Inf. Syst. 2021, 18, 391–403. [Google Scholar] [CrossRef]
- Silvestrini, S.; Piccinin, M.; Zanotti, G.; Brandonisio, A.; Bloise, I.; Feruglio, L.; Lunghi, P.; Lavagna, M.; Varile, M. Optical navigation for Lunar landing based on Convolutional Neural Network crater detector. Aerosp. Sci. Technol. 2022, 123, 107503. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, Q.; Wang, Y. Road extraction by deep residual u-net. IEEE Geosci. Remote Sens. Lett. 2018, 15, 749–753. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Zhou, B.; Hsu, C.Y.; Li, Y.; Ren, F. Recognizing terrain features on terrestrial surface using a deep learning model: An example with crater detection. In Proceedings of the 1st Workshop on Artificial Intelligence and Deep Learning for Geographic Knowledge Discovery, Los Angeles, CA, USA, 7 November 2017; pp. 33–36. [Google Scholar]
- Tewari, A.; Verma, V.; Srivastava, P.; Jain, V.; Khanna, N. Automated crater detection from co-registered optical images, elevation maps and slope maps using deep learning. Planet. Space Sci. 2022, 218, 105500. [Google Scholar] [CrossRef]
- Yang, S.; Cai, Z. High-Resolution Feature Pyramid Network for Automatic Crater Detection on Mars. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–12. [Google Scholar] [CrossRef]
- Wang, H.; Jiang, J.; Zhang, G. CraterIDNet: An end-to-end fully convolutional neural network for crater detection and identification in remotely sensed planetary images. Remote Sens. 2018, 10, 1067. [Google Scholar] [CrossRef] [Green Version]
- Silburt, A.; Ali-Dib, M.; Zhu, C.; Jackson, A.; Valencia, D.; Kissin, Y.; Tamayo, D.; Menou, K. Lunar crater identification via deep learning. Icarus 2019, 317, 27–38. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Fan, Z.; Li, Z.; Zhang, H.; Wei, C. An effective lunar crater recognition algorithm based on convolutional neural network. Remote Sens. 2020, 12, 2694. [Google Scholar] [CrossRef]
- DeLatte, D.M.; Crites, S.T.; Guttenberg, N.; Tasker, E.J.; Yairi, T. Segmentation convolutional neural networks for automatic crater detection on mars. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2944–2957. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Lee, C.; Hogan, J. Automated crater detection with human level performance. Comput. Geosci. 2021, 147, 104645. [Google Scholar] [CrossRef]
- Hu, Z.; Shi, T.; Cen, M.; Wang, J.; Zhao, X.; Zeng, C.; Zhou, Y.; Fan, Y.; Liu, Y.; Zhao, Z. Research progress on lunar and Martian concrete. Constr. Build. Mater. 2022, 343, 128117. [Google Scholar] [CrossRef]
- Ketkar, N.; Moolayil, J. Introduction to pytorch. In Deep Learning with Python; Springer: Berlin/Heidelberg, Germany, 2021; pp. 27–91. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13-19 June 2020; pp. 11531–11539. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Van Hulse, J.; Khoshgoftaar, T.M.; Napolitano, A. Experimental perspectives on learning from imbalanced data. In Proceedings of the 24th International Conference on Machine Learning, Corvalis, OR, USA, 20–24 June 2007; pp. 935–942. [Google Scholar]
- Bue, B.D.; Stepinski, T.F. Machine detection of Martian impact craters from digital topography data. IEEE Trans. Geosci. Remote Sens. 2006, 45, 265–274. [Google Scholar] [CrossRef]
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. Scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef]
- Yong, H.; Huang, J.; Hua, X.; Zhang, L. Gradient centralization: A new optimization technique for deep neural networks. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 635–652. [Google Scholar]
- Barker, M.; Mazarico, E.; Neumann, G.; Zuber, M.; Haruyama, J.; Smith, D. A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus 2016, 273, 346–355. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Structures | LFs | ECA | MFF | PA (%) | MPA (%) | MIoU (%) | FWIoU (%) |
|---|---|---|---|---|---|---|---|
| VGG-16 | CE | 96.3% | 80.0% | 72.1% | 93.5% | ||
| VGG-16-ECA | CE | ✓ | 96.4% | 80.6% | 72.9% | 93.7% | |
| VGG-16-ECA | FL | ✓ | 96.6% | 81.6% | 73.9% | 94.0% | |
| VGG-16-MFF | CE | ✓ | 96.5% | 81.1% | 73.5% | 93.9% | |
| VGG-16-MFF | FL | ✓ | 96.6% | 81.8% | 74.1% | 94.0% | |
| VGG-16-ECA-MFF (AFNet) | CE | ✓ | ✓ | 96.5% | 80.7% | 73.0% | 93.8% |
| VGG-16-ECA-MFF (AFNet) | FL | ✓ | ✓ | 96.7% | 82.0% | 74.4% | 94.1% |
| VGG-16-ECA-MFF (AFNet) | CESL | ✓ | ✓ | 96.8% | 82.8% | 75.2% | 94.3% |
| Metrics | 0.3 | 0.35 | 0.4 | 0.45 | 0.5 | 0.55 | 0.6 | 0.65 | 0.7 | 0.75 | 0.8 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Precision | 27.1% | 54.6% | 70.5% | 77.3% | 80.6% | 83.7% | 86.0% | 90.3% | 91.4% | 92.1% | 91.4% |
| Recall | 87.6% | 85.4% | 84.7% | 83.4% | 81.9% | 78.4% | 73.4% | 67.2% | 58.4% | 45.6% | 28.7% |
| 40.0% | 64.7% | 74.9% | 78.3% | 79.4% | 79.0% | 77.2% | 74.9% | 69.2% | 58.5% | 41.6% | |
| 58.4% | 74.9% | 80.0% | 80.9% | 80.6% | 78.3% | 74.6% | 69.9% | 62.0% | 49.8% | 32.6% | |
| 41.9% | 29.9% | 21.4% | 17.1% | 14.9% | 12.7% | 11.1% | 8.1% | 7.2% | 6.6% | 6.9% | |
| 70.2% | 41.6% | 26.4% | 19.9% | 16.7% | 13.5% | 11.0% | 7.2% | 5.5% | 4.0% | 2.9% | |
| 17.5% | 13.9% | 12.7% | 11.3% | 12.0% | 10.7% | 9.3% | 9.4% | 8.8% | 9.6% | 8.2% | |
| 17.0% | 13.7% | 11.3% | 10.6% | 9.8% | 9.2% | 8.3% | 7.7% | 7.4% | 7.0% | 6.8% | |
| 13.0% | 9.2% | 8.0% | 7.3% | 6.6% | 5.7% | 4.8% | 4.6% | 4.2% | 4.1% | 3.7% |
| Algorithms | P | R | FLOPs (G) | Params (M) | FPS (HZ) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DeepMoon [35] | 56.0% | 92.0% | 66.2% | 72.9% | 40.0% | 42.0% | 14.0% | 11.0% | 8.0% | 74.3 | 10.28 | 8.7 |
| ERU-Net [36] | 75.4% | 81.2% | 78.1% | 78.5% | 18.3% | 21.5% | 9.9% | 10.0% | 7.8% | 183.3 | 23.7 | 4.3 |
| D-LinkNet [23] | 77.2% | 68.3% | 61.2% | 55.1% | 17.3% | 17.1% | 10.1% | 10.0% | 7.3% | 6.0 | 21.0 | 46.4 |
| SwiftNet [24] | 77.1% | 52.6% | 61.4% | 56.1% | 17.0% | 13.3% | 22.9% | 19.9% | 13.2% | 3.2 | 11.8 | 60.2 |
| ELCD (our) | 80.6% | 81.9% | 79.4% | 80.6% | 14.9% | 16.7% | 12.0% | 9.8% | 6.6% | 43.7 | 21.8 | 73.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, L.; Yuan, J.; Zha, K.; Wang, X. ELCD: Efficient Lunar Crater Detection Based on Attention Mechanisms and Multiscale Feature Fusion Networks from Digital Elevation Models. Remote Sens. 2022, 14, 5225. https://doi.org/10.3390/rs14205225
Fan L, Yuan J, Zha K, Wang X. ELCD: Efficient Lunar Crater Detection Based on Attention Mechanisms and Multiscale Feature Fusion Networks from Digital Elevation Models. Remote Sensing. 2022; 14(20):5225. https://doi.org/10.3390/rs14205225
Chicago/Turabian StyleFan, Lili, Jiabin Yuan, Keke Zha, and Xunan Wang. 2022. "ELCD: Efficient Lunar Crater Detection Based on Attention Mechanisms and Multiscale Feature Fusion Networks from Digital Elevation Models" Remote Sensing 14, no. 20: 5225. https://doi.org/10.3390/rs14205225
APA StyleFan, L., Yuan, J., Zha, K., & Wang, X. (2022). ELCD: Efficient Lunar Crater Detection Based on Attention Mechanisms and Multiscale Feature Fusion Networks from Digital Elevation Models. Remote Sensing, 14(20), 5225. https://doi.org/10.3390/rs14205225