

Geostatistical Modelling of Soil Spatial Variability by Fusing Drone-Based Multispectral Data, Ground-Based Hyperspectral and Sample Data with Change of Support



Abstract
:1. Introduction
2. Materials and Methods
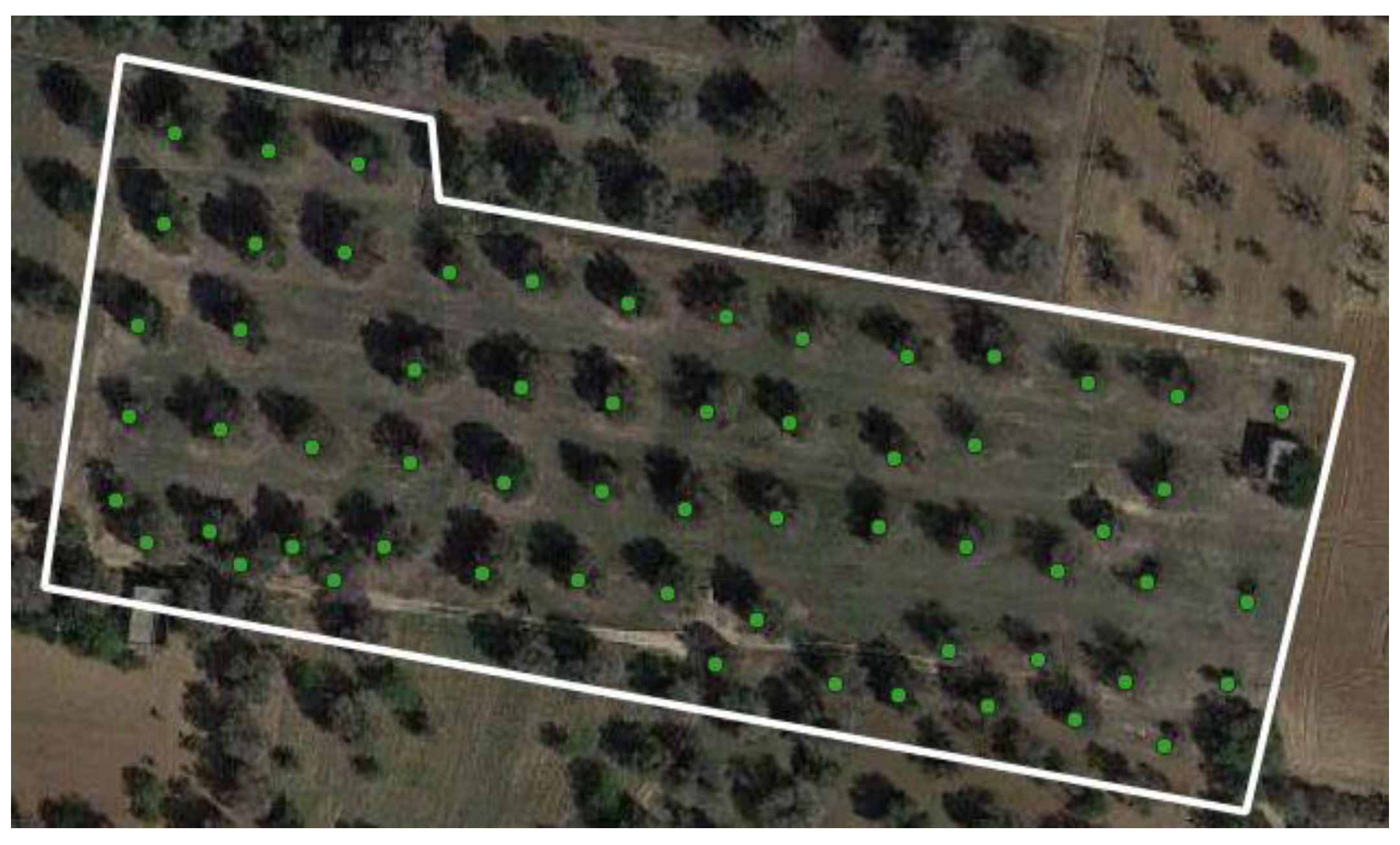
2.1. Soil Sampling and Study Site
2.2. Drone Data
- Recombining classes and mask generation
- 2.
- Point shapefile of soil
- 3.
- CSV file
2.3. Laboratory-Based Granulometry Measurement
2.4. Hyperspectral Data and Their Analysis
2.5. Spectral Index of Soil Samples
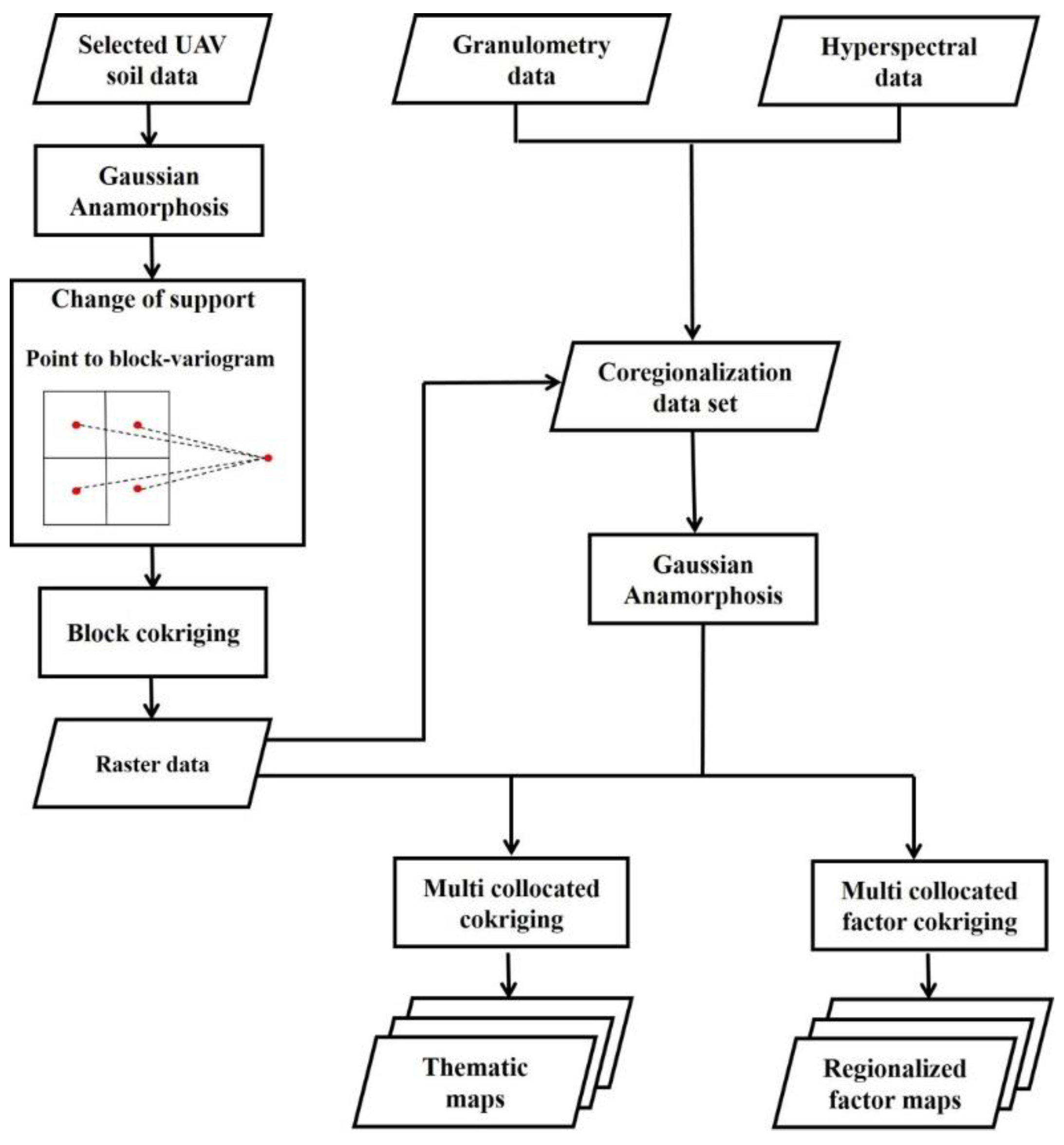
2.6. Geostatistical Procedures
2.7. Change of Support
2.8. Data Fusion and Partitioning of the Field
2.8.1. Multi-Collocated Cokriging
2.8.2. Multi-Collocated Factor Cokriging
2.9. Estimation Uncertainty
3. Results and Discussion
3.1. Geostatistical Analysis of Drone Data and Change of Support
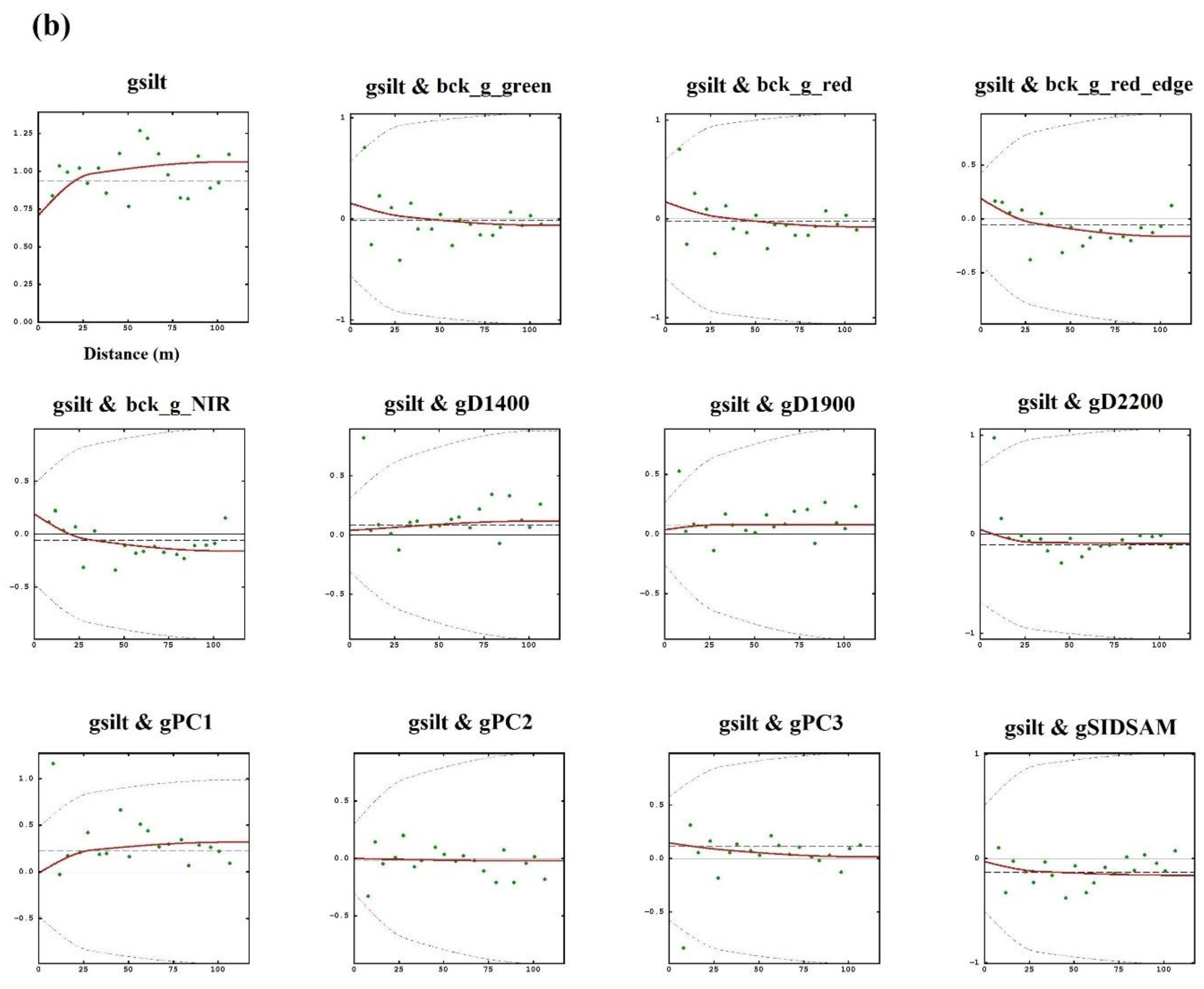
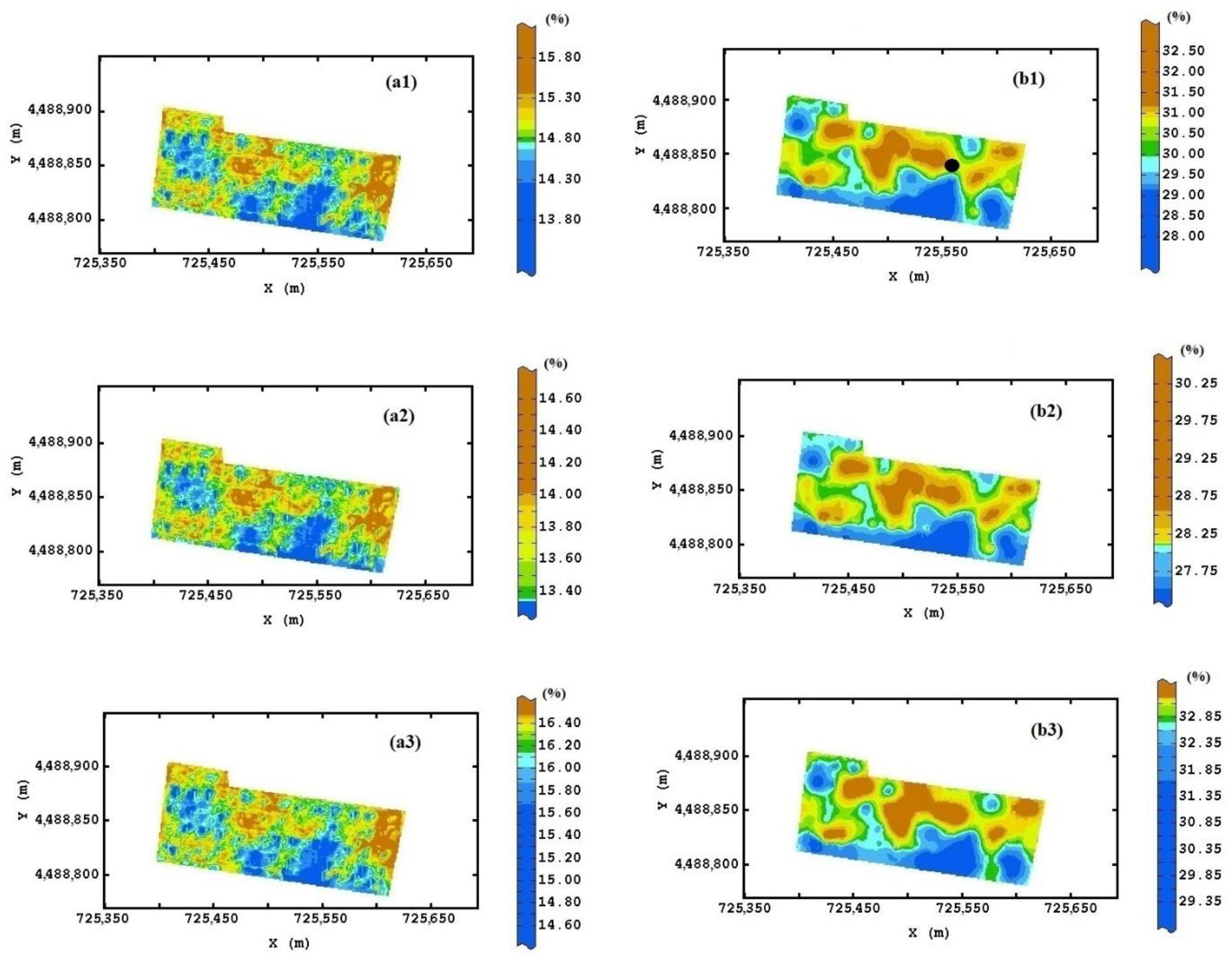
3.2. Geostatistical Soil Data Fusion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Fountas, S.; Wulfsohn, D.; Blackmore, B.S.; Jacobsen, H.L.; Pedersen, S.M. A model of decision-making and information flows for information-intensive agriculture. Agric. Syst. 2006, 87, 192–210. [Google Scholar] [CrossRef]
- Ge, Y.; Thomasson, J.A.; Ruixiu, S. Remote sensing of soil properties in precision agriculture: A review. Front. Earth Sci. 2011, 5, 229–238. [Google Scholar] [CrossRef]
- ISPA International Society of Precision Agriculture. Available online: https://www.ispag.org/about/definition (accessed on 24 October 2022).
- Berge, H.F.M.; Schroder, J.J.; Olesen, J.E.; Cervera, J.V.G. Research for AGRI Committee—Preserving agricultural soils in the EU, European Parliament, Policy Department for Structural and Cohesion Policies, Brussels. Available online: http://www.europarl.europa.eu/committees/en/supporting-analyses-search.html (accessed on 31 March 2017).
- Castrignanò, A.; Quarto, R.; Venezia, A.; Buttafuoco, G. A comparison between mixed support kriging and block cokriging for modelling and combining spatial data with different support. Precis. Agric. 2019, 20, 193–213. [Google Scholar] [CrossRef]
- Jurado-Expósito, M.; López-Granados, F.; Jiménez-Brenes, F.M.; Torres-Sánchez, J. Monitoring the Spatial Variability of Knapweed (Centaurea diluta Aiton) in Wheat Crops Using Geostatistics and UAV Imagery: Probability Maps for Risk Assessment in Site-Specific Control. Agronomy 2021, 11, 880. [Google Scholar] [CrossRef]
- Rossel, R.A.V.; Adamchuk, V.I.; Sudduth, K.A.; McKenzie, N.J.; Lobsey, C. Chapter Five-Proximal Soil Sensing: An Effective Approach for Soil Measurements in Space and Time. Adv. Agron. 2011, 113, 243–291. [Google Scholar] [CrossRef]
- De Benedetto, D.; Castrignanò, A.; Sollitto, D.; Modugno, F.; Buttafuoco, G.; Lo Papa, G. Integrating geophysical and geostatistical techniques to map the spatial variation of clay. Geoderma 2012, 171–172, 53–63. [Google Scholar] [CrossRef]
- Loiseau, T.; Chen, S.; Mulder, V.L.; Dobarco, M.R.; Richer-de-Forges, A.C.; Lehmann, S.; Bourennane, H.; Saby, N.P.A.; Martin, M.P.; Vaudour, E.; et al. Satellite data integration for soil clay content modelling at a national scale. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101905. [Google Scholar] [CrossRef]
- Vaudour, E.; Gomez, C.; Fouad, Y.; Lagacherie, P. Sentinel-2 image capacities to predict common topsoil properties of temperate and Mediterranean agroecosystems. Remote Sens. Environ. 2019, 223, 21–33. [Google Scholar] [CrossRef]
- Mitran, T.; Meena, R.S.; Chakraborty, A. Geospatial Technologies for Crops and Soils; Springer Nature: Singapore, 2021. [Google Scholar]
- Demattê, J.A.M.; Fongaro, C.T.; Rizzo, R.; Safanelli, J.L. Geospatial Soil Sensing System (GEOS3): A powerful data mining procedure to retrieve soil spectral reflectance from satellite images. Remote Sens. Environ. 2018, 212, 161–175. [Google Scholar] [CrossRef]
- Vaudour, E.; Gholizadeh, A.; Castaldi, F.; Saberioon, M.; Borůvka, L.; Urbina-Salazar, D.; Fouad, Y.; Arrouays, D.; Richer-de-Forges, A.C.; Biney, J.; et al. Satellite Imagery to Map Topsoil Organic Carbon Content over Cultivated Areas: An Overview. Remote Sens. 2022, 14, 2917. [Google Scholar] [CrossRef]
- von Hebel, C.; Matveeva, M.; Verweij, E.; Rademske, P.; Kaufmann, M.S.; Brogi, C.; Vereecken, H.; Rascher, U.; van der Kruk, J. Understanding soil and plant interaction by combining ground-based quantitative electromagnetic induction and airborne hyperspectral data. Geophys. Res. Lett. 2018, 45, 7571–7579. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-de-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Pedrazzi, S.; Peruzzi, A.; Pajares, G.; Kaplanis, G.; et al. Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 2017, 18, 574–614. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Stenberg, B. Effects of soil sample pretreatments and standardised rewetting as interacted with sand classes on Vis-NIR predictions of clay and soil organic carbon. Geoderma 2010, 158, 15–22. [Google Scholar] [CrossRef] [Green Version]
- Rinnan, A.; Berg, F.V.D.; Engelsen, S.B. Review of the most common pre-processing techniques for near-infrared spectra. Trends Analyt. Chem. 2009, 28, 1201–1222. [Google Scholar] [CrossRef]
- Riefolo, C.; Castrignanò, A.; Colombo, C.; Conforti, M.; Ruggieri, S.; Vitti, C.; Buttafuoco, G. Investigation of soil surface organic and inorganic carbon contents in a low-intensity farming system using laboratory visible and near-infrared spectroscopy. Arch. Agron. 2020, 66, 1436–1448. [Google Scholar] [CrossRef]
- Rossel, R.A.V.; Behrens, T.; Ben-Dor, E.; Chabrillat, S.; Demattê, J.A.M.; Ge, Y.; Gomez, C.; Guerrero, C.; Peng, Y.; Ramirez-Lopez, L.; et al. Diffuse reflectance spectroscopy for estimating soil properties: A technology for the 21st century. Eur. J. Soil Sci. 2022, 73, e13271. [Google Scholar] [CrossRef]
- Gomez, C.; Lagacherie, P.; Coulouma, G. Continuum removal versus PLSR method for clay and calcium carbonate content estimation from laboratory and airborne hyperspectral measurements. Geoderma 2008, 148, 141–148. [Google Scholar] [CrossRef]
- Geladi, P.; Macdougall, D.; Martens, H. Linearization and scatter-correction for near-infrared reflectance spectra of meat. Appl. Spectrosc. 1985, 39, 491–500. [Google Scholar] [CrossRef]
- Barnes, R.J.; Dhanoa, M.S.; Lister, S.J. Standard normal variate transformation and de-trending of near-infrared diffuse reflectance spectra. Appl. Spectrosc. 1989, 43, 772–777. [Google Scholar] [CrossRef]
- Clark, R.N.; Roush, T.L. Reflectance spectroscopy: Quantitative analysis techniques for remote sensing applications. J. Geophys. Res. 1984, 89, 6329–6340. [Google Scholar] [CrossRef]
- Gaffey, S.J. Spectral reflectance of carbonate minerals in the visible and near infrared (0.35–2.55 m): Calcite, aragonite and dolomite. Am. Mineral. 1986, 71, 151–162. [Google Scholar] [CrossRef]
- Chabrillat, S.; Goetz, A.F.H.; Krosley, L.; Olsen, H.W. Use of hyperspectral images in the identification and mapping of expansive clay soils and the role of spatial resolution. Remote Sens. Environ. 2002, 82, 431–445. [Google Scholar] [CrossRef]
- Chatterjee, A.; Michalak, A.M.; Kahn, R.A.; Paradise, S.R.; Braverman, A.J.; Miller, C.E. A geostatistical data fusion technique for merging remote sensing and groundbased observations of aerosol optical thickness. J. Geophys. Res. 2010, 115, D20207. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.; Cressie, N.; Braverman, A. Spatial statistical data fusion for remote sensing applications. J. Am. Stat. Assoc. 2012, 107, 1004–1018. [Google Scholar] [CrossRef]
- Castrignanò, A.; Belmonte, A.; Antelmi, I.; Quarto, R.; Quarto, F.; Shaddad, S.; Sion, V.; Muolo, M.R.; Ranieri, N.A.; Gadaleta, G.; et al. A geostatistical fusion approach using UAV data for probabilistic estimation of Xylella fastidiosa subsp. pauca infection in olive trees. Sci. Total Environ. 2021, 752, 141814. [Google Scholar] [CrossRef]
- De Benedetto, D.; Castrignanò, A.; Rinaldi, M.; Ruggieri, S.; Santoro, F.; Figorito, B.; Gualano, S.; Diacono, M.; Tamborrino, R. An approach for delineating homogeneous zones by using multi-sensor data. Geoderma 2013, 199, 117–127. [Google Scholar] [CrossRef]
- Riefolo, C.; Belmonte, A.; Quarto, R.; Quarto, F.; Ruggieri, S.; Castrignanò, A. Potential of GPR data fusion with hyperspectral data for precision agriculture of the future. Comput. Electron. Agric. 2022, 199, 107109. [Google Scholar] [CrossRef]
- Castrignanò, A.; Buttafuoco, G.; Quarto, R.; Parisi, D.; Rossel, R.A.V.; Terribile, F.; Langella, G.; Venezia, A. A geostatistical sensor data fusion approach for delineating homogeneous management zones in Precision Agriculture. Catena 2018, 167, 293–304. [Google Scholar] [CrossRef]
- Castrignanò, A.; Buttafuoco, G.; Quarto, R.; Vitti, C.; Langella, G.; Terribile, F.; Venezia, A. A Combined Approach of Sensor Data Fusion and Multivariate Geostatistics for Delineation of Homogeneous Zones in an Agricultural Field. Sensors 2017, 17, 2794. [Google Scholar] [CrossRef]
- Gotway, C.A.; Young, L.J. Combining incompatible spatial data. J. Am. Stat. Assoc. 2002, 97, 632–648. [Google Scholar] [CrossRef] [Green Version]
- Castrignanò, A.; Buttafuoco, G. Data processing: Chapter 3. In Agricultural Internet of Things and Decision Support for Precision Smart Farming, 1st ed.; Castrignanò, A., Buttafuoco, G., Khosla, R., Mouazen, A.M., Moshou, D., Naud, O., Eds.; Academic Press: Cambridge, MA, USA, 2020; pp. 139–182. [Google Scholar]
- Cressie, N. Change of support and the modifiable areal unit problem. Geogr. Syst. 1996, 3, 159–180. [Google Scholar]
- Goovaerts, P. Sample support. Wyley Stats Ref: Statistics Reference Online; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Harding, B.E.; Deutsch, C.V. Change of Support and the Volume Variance Relation. Available online: http://geostatisticslessons.com/lessons/changeofsupport (accessed on 13 January 2019).
- Moshrefi, N. A new method of sampling soil suspension for particle-size analysis. Soil Sci. 1993, 155, 245–248. [Google Scholar] [CrossRef]
- Indorante, S.J.; Follmer, L.R.; Hammer, R.D.; Koenig, P.G. Particle-size analysis by a modified pipette procedure. Soil Sci. Soc. Am. J. 1990, 54, 560–563. [Google Scholar] [CrossRef]
- Dufrechou, G.; Grandjean, G.; Bourguignon, A. Geometrical analysis of laboratory soil spectra in the short-wave infrared domain: Clay composition and estimation of the swelling potential. Geoderma 2015, 243-244, 92–107. [Google Scholar] [CrossRef]
- Du, Y.; Chang, C.I.; Ren, H.; Chang, C.-C.; Jensen, J.O.; D’Amico, F.M. New hyperspectral discrimination measure for spectral characterization. Opt. Eng. 2004, 43, 1777–1786. [Google Scholar] [CrossRef] [Green Version]
- Wackernagel, H. Multivariate Geostatistics: An Introduction with Applications; Springer Nature: London, UK, 2003; ISBN 139783540441427. [Google Scholar]
- Chilès, J.P.; Delfiner, P. Geostatistics: Modeling Spatial Uncertainty, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Castrignanò, A.; Giugliarini, L.; Risaliti, R.; Martinelli, N. Study of spatial relationships among soil physical-chemical properties using Multivariate Geostatistics. Geoderma 2000, 97, 39–60. [Google Scholar] [CrossRef]
- Goovaerts, P. Geostatistics for Natural Resources Evaluation; Oxford University Press: New York, NY, USA, 1997; p. 483. [Google Scholar]
- Rivoirard, J. Which models for collocated cokriging? J. Math. Geol. 2001, 33, 117–131. [Google Scholar] [CrossRef]
- Isaaks, E.H.; Srivastava, R.M. An Introduction to Applied Geostatistics, 1st ed.; Oxford University Press: New York, NY, USA, 1989; p. 413. [Google Scholar]
- Carroll, S.S.; Cressie, N. A comparison of geostatistical methodologies used to estimate snow water equivalent. Water Resour. Bull. 1996, 32, 267–278. [Google Scholar] [CrossRef]
- Atkinson, P.M.; Tate, N.J. Spatial Scale Problems and Geostatistical Solutions: A Review. Prof. Geogr. 2000, 52, 607–623. [Google Scholar] [CrossRef]
- Malone, B.P.; McBratney, A.B.; Minasny, B. Spatial Scaling for Digital Soil Mapping. Soil Sci. Soc. Am. J. 2012, 77, 890–902. [Google Scholar] [CrossRef] [Green Version]
- Journel, A.G.; Huijbregts, C.J. Mining Geostatistics; Academic Press: London, UK, 1978; p. 600. [Google Scholar]
- Armstrong, M. Basic Linear Geostatistics; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1998; p. 22. [Google Scholar]
- Olea, R.A. Geostatistical Glossary and Multilingual Dictionary; Oxford University Press: New York, NY, USA, 1991; p. 192. [Google Scholar]
- Myers, D.E. Matrix formulation of Co-Kriging. Math. Geol. 1982, 14, 249–257. [Google Scholar] [CrossRef] [Green Version]
- Castrignanò, A.; Costantini, E.; Barbetti, R.; Sollito, D. Accounting for extensive topographic and pedologic secondary information to improve soil mapping. Catena 2009, 77, 28–38. [Google Scholar] [CrossRef]
- Matheron, G. Pour Une Analyse Krigeante Des Données Regionalisées; Technical Report n. 732; Ecole Nationale Superieure des Mines: Paris, France, 1982; p. 22. [Google Scholar]
- Diacono, M.; Castrignanò, A.; Vitti, C.; Stellacci, A.M.; Marino, L.; Cocozza, C.; De Benedetto, D.; Troccoli, A.; Rubino, P.; Ventrella, D. An approach for assessing the effects of site-specific fertilization on crop growth and yield of durum wheat in organic agriculture. Precis. Agric. 2014, 15, 479–498. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Resolution | Image Size | Bands | Mass | Size |
|---|---|---|---|---|
| 1.2 Mpx * | 1280 × 960 pixels | Green (550 ± 20 nm) Red (660 ± 20 nm) Red Edge (735 ± 5 nm) NIR (790 ± 20 nm) | 72 g | 59 × 41 × 28 mm |
| Variable | Minimum | Maximum | Mean | Median | Std. Dev. | Skewness | Kurtosis |
|---|---|---|---|---|---|---|---|
| green | 0.027 | 0.256 | 0.098 | 0.094 | 0.018 | 1.56 | 7.73 |
| Red | 0.021 | 0.362 | 0.133 | 0.128 | 0.030 | 1.35 | 6.33 |
| red_edge | 0.028 | 0.401 | 0.183 | 0.177 | 0.034 | 1.15 | 5.78 |
| NIR | 0.032 | 0.558 | 0.235 | 0.228 | 0.041 | 1.08 | 5.65 |
| Variable | Mean | Variance |
|---|---|---|
| g_green | 0.0031 | 1.01 |
| g_red | −0.0083 | 1.00 |
| g_red_edge | −0.0007 | 1.07 |
| g_NIR | 0.0001 | 1.06 |
| Variable | Count | Minimum | Maximum | Mean | Std. Dev. | Skewness | Kurtosis |
|---|---|---|---|---|---|---|---|
| Clay | 61 | 13.34 | 16.48 | 14.94 | 0.72 | 0.00 | 2.50 |
| Silt | 61 | 27.53 | 33.22 | 30.16 | 1.38 | 0.19 | 2.19 |
| Sabbia | 61 | 51.19 | 57.98 | 54.90 | 1.90 | −0.12 | 1.79 |
| D1400 | 61 | 0.05 | 0.09 | 0.07 | 0.01 | −0.23 | 2.73 |
| D1900 | 61 | 0.18 | 0.30 | 0.24 | 0.03 | −0.56 | 2.43 |
| D2200 | 61 | 0.05 | 0.07 | 0.06 | 0.01 | −0.29 | 3.29 |
| R1 | 61 | 0.88 | 1.61 | 1.18 | 0.14 | 0.30 | 3.14 |
| R2 | 61 | 2.99 | 5.20 | 3.94 | 0.50 | 0.03 | 2.46 |
| PC1 | 61 | −1.43 | 3.58 | 0.00 | 0.99 | 1.72 | 6.06 |
| PC2 | 61 | −1.75 | 2.37 | 0.00 | 0.99 | 0.59 | 2.47 |
| PC3 | 61 | −1.14 | 2.39 | 0.00 | 0.99 | 1.13 | 3.13 |
| SIDSAM | 61 | 0.00 | 0.09 | 0.03 | 0.03 | 0.90 | 2.82 |
| bck_g_green | 61 | −2.74 | 0.29 | −1.82 | 0.50 | 1.26 | 6.61 |
| bck_g_red | 61 | −2.66 | 0.48 | −1.71 | 0.51 | 1.35 | 6.98 |
| bck_g_red_edge | 61 | −2.42 | 0.36 | −0.93 | 0.69 | −0.18 | 2.08 |
| bck_g_NIR | 61 | −2.27 | 0.98 | −0.66 | 0.76 | −0.21 | 2.19 |
| Variable | SE Mean | SE Variance |
|---|---|---|
| gclay | −0.009 | 1.03 |
| gsilt | 0.006 | 1.03 |
| Variable | Scale 29.89 m | Scale 104.21 m | ||
|---|---|---|---|---|
| F1 | F2 | F1 | F2 | |
| gbck_g_green | 0.4531 | 0.2032 | 0.1001 | 0.3298 |
| gbck_g_red | 0.4037 | 0.2032 | 0.0889 | 0.3472 |
| gbck_g_red_edge | 0.3006 | 0.3592 | 0.2220 | 0.4524 |
| gbck_g_NIR | 0.2493 | 0.3674 | 0.2200 | 0.4212 |
| gD1400 | −0.2316 | 0.1418 | 0.5128 | −0.2657 |
| gD1900 | −0.3275 | 0.1787 | 0.5088 | −0.1050 |
| gD2200 | −0.2114 | 0.1380 | 0.1546 | −0.0488 |
| gPC1 | 0.0649 | −0.4585 | 0.1814 | −0.3510 |
| gPC2 | 0.3377 | −0.2675 | −0.4847 | 0.1061 |
| gPC3 | 0.2400 | −0.1433 | 0.1231 | 0.2514 |
| gSIDSAM | −0.2998 | 0.4443 | 0.2209 | 0.1623 |
| gclay | 0.0002 | −0.0836 | 0.0816 | −0.1830 |
| gsilt | −0.0885 | −0.2489 | −0.0161 | −0.2170 |
| Eigen Val. | 1.4358 | 1.3355 | 4.1292 | 1.9889 |
| Var. Perc. | 39.77 | 37.00 | 63.26 | 30.47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belmonte, A.; Riefolo, C.; Lovergine, F.; Castrignanò, A. Geostatistical Modelling of Soil Spatial Variability by Fusing Drone-Based Multispectral Data, Ground-Based Hyperspectral and Sample Data with Change of Support. Remote Sens. 2022, 14, 5442. https://doi.org/10.3390/rs14215442
Belmonte A, Riefolo C, Lovergine F, Castrignanò A. Geostatistical Modelling of Soil Spatial Variability by Fusing Drone-Based Multispectral Data, Ground-Based Hyperspectral and Sample Data with Change of Support. Remote Sensing. 2022; 14(21):5442. https://doi.org/10.3390/rs14215442
Chicago/Turabian StyleBelmonte, Antonella, Carmela Riefolo, Francesco Lovergine, and Annamaria Castrignanò. 2022. "Geostatistical Modelling of Soil Spatial Variability by Fusing Drone-Based Multispectral Data, Ground-Based Hyperspectral and Sample Data with Change of Support" Remote Sensing 14, no. 21: 5442. https://doi.org/10.3390/rs14215442
APA StyleBelmonte, A., Riefolo, C., Lovergine, F., & Castrignanò, A. (2022). Geostatistical Modelling of Soil Spatial Variability by Fusing Drone-Based Multispectral Data, Ground-Based Hyperspectral and Sample Data with Change of Support. Remote Sensing, 14(21), 5442. https://doi.org/10.3390/rs14215442