
Temporal Subset SBAS InSAR Approach for Tropical Peatland Surface Deformation Monitoring Using Sentinel-1 Data

 ,
,  ,
, 
Abstract
:1. Introduction
2. Dynamic Scatterer Changes in Tropical Peatland
2.1. Study Area
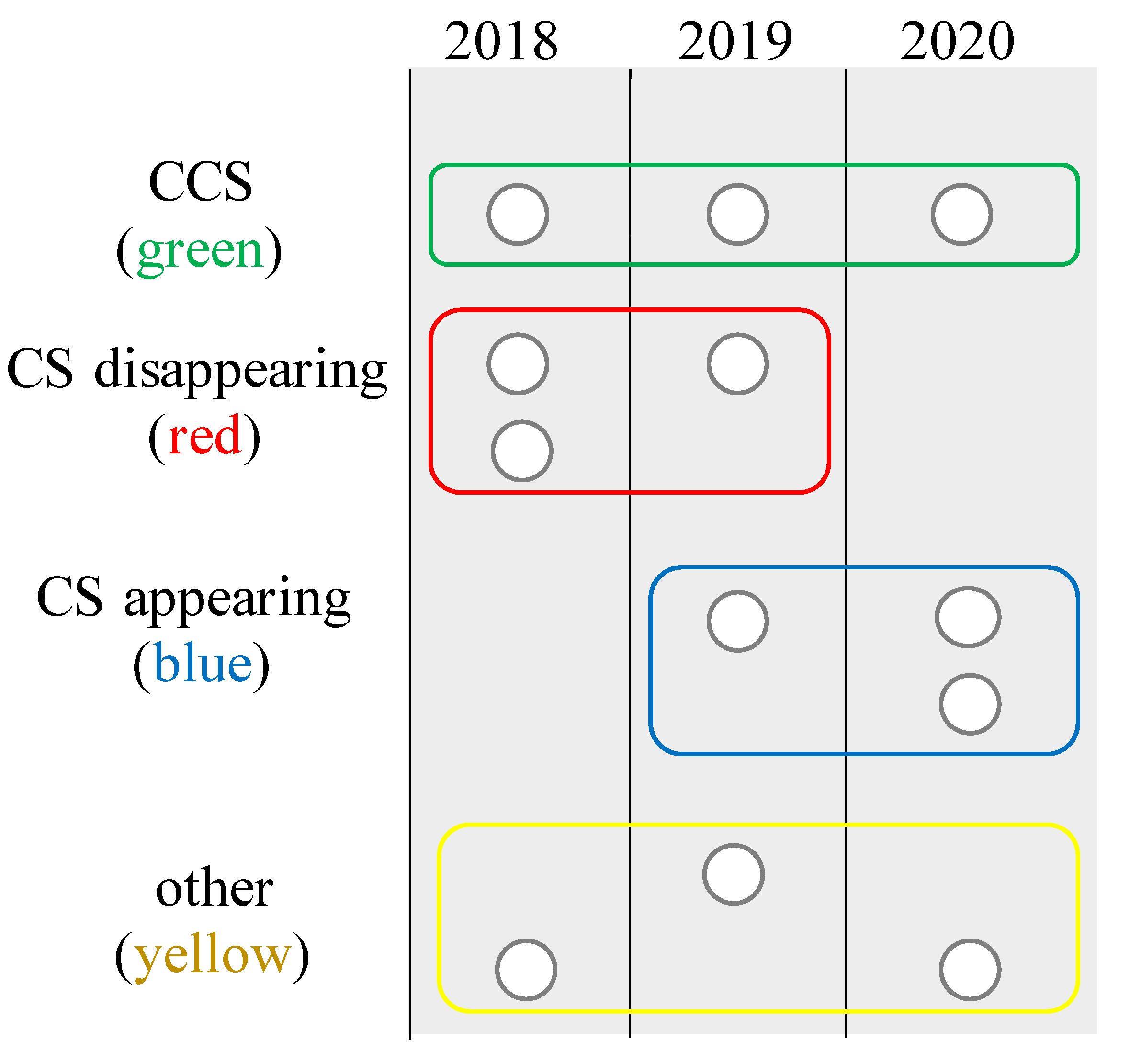
2.2. Dynamic Scatterer Changes
3. Methodology
3.1. Time Series InSAR Processing
3.2. Temporal Subset SBAS Processing
3.3. Evaluation of SUBSET with a Simulated Environment
- Noise-free raw phase series are first simulated based on an arbitrary deformation phase model . We adopt linear subsidence with a yearly trend model by in millimeters, where denotes the number of days from the initial date.
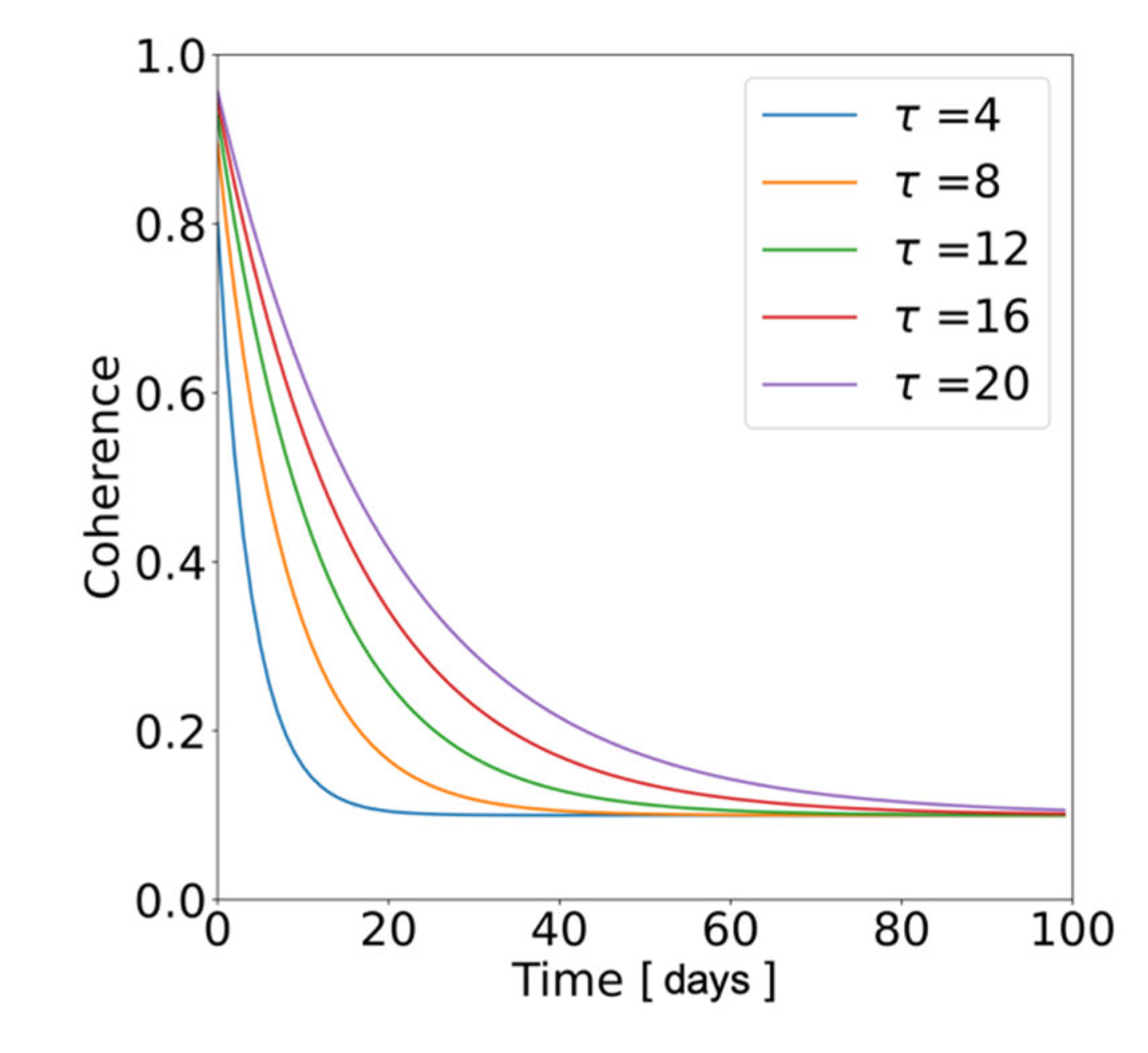
- Spatial coherence is computed based on the temporal decorrelation model with exponential decay [38],where accounts for the infinite value of coherence and is the time for the coherence to drop to of its initial value. Figure 7 shows examples of the temporal decorrelation model for several values from 4 to 20 with . Note that other decorrelation sources that exist in actual data, such as geometric decorrelation, doppler centroid decorrelation, volume decorrelation, thermal or system noise decorrelation, and processing-induced decorrelation [46], were omitted from this simulation for simplicity.Figure 7. Temporal decorrelation model employed in the simulation. is varied from 4 to 20 with .
![Remotesensing 14 05825 g007]()
- Interferometric phase noises are statistically simulated based on the following probability density function (pdf) [43],with where is the expected interferometric phase , is the gamma function, and denotes the number of looks. We set and as 0 and 25, respectively, in this simulation. Phase noises are generated by a normalized cumulative sum of the pdf. Finally, generated interferometric phase noises are added to the noise-free phase generated in step 1.
- Phase variance for each interferogram and pixel is calculated by a moving spatial window on the interferogram images generated in step 3. Spatial coherence is then estimated by the relationship .
- Raw phase time series are estimated by a WLS solution using the derived phase variances. Finally, the temporal coherence is computed based on (6). Note that derived in this simulation was expected to be lower than that in real cases because it does not account for possible phase unwrapping errors and other decorrelation sources.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4. Results
4.1. Results Comparison of the SUBSET and WHOLE Methods
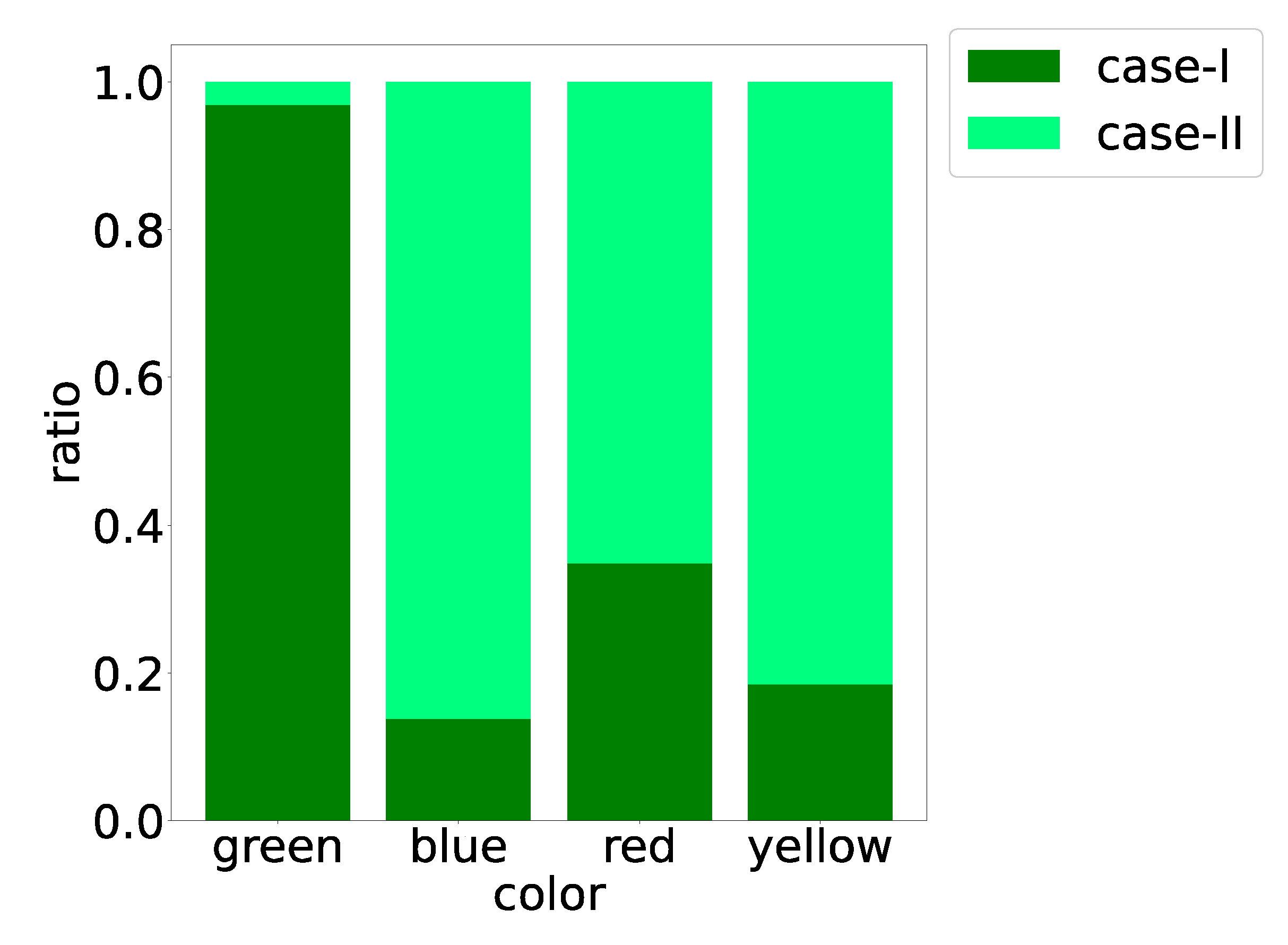
4.2. Color Representation
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Osaki, M.; Kato, T.; Kohyama, T.; Takahashi, H.; Haraguchi, A.; Yabe, K.; Tsuji, N.; Shiodera, S.; Rahajoe, J.S.; Atikah, T.D.; et al. Basic Information about Tropical Peatland Ecosystems BT—Tropical Peatland Eco-Management; Osaki, M., Tsuji, N., Foead, N., Rieley, J., Eds.; Springer Singapore: Singapore, 2021; pp. 3–62. ISBN 9789813346543. [Google Scholar]
- Hooijer, A.; Silvius, M.; Woesten, H.; Page, S. PEAT-CO2 Assessment of CO2 Emissions from Drained Peatlands in SE Asia; Delft Hydraulics: Delft, The Netherlands, 2006. [Google Scholar]
- Langner, A.; Miettinen, J.; Siegert, F. Land Cover Change 2002–2005 in Borneo and the Role of Fire Derived from MODIS Imagery. Glob. Chang. Biol. 2007, 13, 2329–2340. [Google Scholar] [CrossRef]
- Hirano, T.; Kusin, K.; Limin, S.; Osaki, M. Carbon Dioxide Emissions through Oxidative Peat Decomposition on a Burnt Tropical Peatland. Glob. Chang. Biol. 2014, 20, 555–565. [Google Scholar] [CrossRef] [PubMed]
- Evans, C.D.; Callaghan, N.; Jaya, A.; Grinham, A.; Sjogersten, S.; Page, S.E.; Harrison, M.E.; Kusin, K.; Kho, L.K.; Ledger, M.; et al. A Novel Low-Cost, High-Resolution Camera System for Measuring Peat Subsidence and Water Table Dynamics. Front. Environ. Sci. 2021, 9, 33. [Google Scholar] [CrossRef]
- Howie, S.A.; Hebda, R.J. Bog Surface Oscillation (Mire Breathing): A Useful Measure in Raised Bog Restoration. Hydrol. Process. 2018, 32, 1518–1530. [Google Scholar] [CrossRef]
- Osmanoğlu, B.; Sunar, F.; Wdowinski, S.; Cabral-Cano, E. Time Series Analysis of InSAR Data: Methods and Trends. ISPRS J. Photogramm. Remote Sens. 2016, 115, 90–102. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, Z.; Waldron, S.; Tanaka, A. InSAR Time Series Analysis of L-Band Data for Understanding Tropical Peatland Degradation and Restoration. Remote Sens. 2019, 11, 2592. [Google Scholar] [CrossRef] [Green Version]
- Hoyt, A.M.; Chaussard, E.; Seppalainen, S.S.; Harvey, C.F. Widespread Subsidence and Carbon Emissions across Southeast Asian Peatlands. Nat. Geosci. 2020, 13, 435–440. [Google Scholar] [CrossRef]
- Umarhadi, D.A.; Avtar, R.; Widyatmanti, W.; Johnson, B.A.; Yunus, A.P.; Khedher, K.M.; Singh, G. Use of Multifrequency (C-Band and L-Band) SAR Data to Monitor Peat Subsidence Based on Time-Series SBAS InSAR Technique. L. Degrad. Dev. 2021, 32, 4779–4794. [Google Scholar] [CrossRef]
- Umarhadi, D.A.; Widyatmanti, W.; Kumar, P.; Yunus, A.P.; Khedher, K.M.; Kharrazi, A.; Avtar, R. Tropical Peat Subsidence Rates Are Related to Decadal LULC Changes: Insights from InSAR Analysis. Sci. Total Environ. 2021, 816, 151561. [Google Scholar] [CrossRef]
- Khakim, M.Y.N.; Bama, A.A.; Yustian, I.; Poerwono, P.; Tsuji, T.; Matsuoka, T. Peatland Subsidence and Vegetation Cover Degradation as Impacts of the 2015 El Niño Event Revealed by Sentinel-1A SAR Data. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101953. [Google Scholar] [CrossRef]
- Marshall, C.; Large, D.J.; Athab, A.; Evers, S.L.; Sowter, A.; Marsh, S.; Sjögersten, S. Monitoring Tropical Peat Related Settlement Using ISBAS InSAR, Kuala Lumpur International Airport (KLIA). Eng. Geol. 2018, 244, 57–65. [Google Scholar] [CrossRef]
- Even, M.; Schulz, K. InSAR Deformation Analysis with Distributed Scatterers: A Review Complemented by New Advances. Remote Sens. 2018, 10, 744. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent Scatterers in SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 1999, 39, 1528–1530. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear Subsidence Rate Estimation Using Permanent Scatterers in Differential SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2202–2212. [Google Scholar] [CrossRef] [Green Version]
- Hooper, A.J. A Multi-Temporal InSAR Method Incorporating Both Persistent Scatterer and Small Baseline Approaches. Geophys. Res. Lett. 2008, 35, 34654. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Fornaro, G.; Verde, S.; Reale, D.; Pauciullo, A. CAESAR: An Approach Based on Covariance Matrix Decomposition to Improve Multibaseline–Multitemporal Interferometric SAR Processing. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2050–2065. [Google Scholar] [CrossRef]
- Ansari, H.; De Zan, F.; Bamler, R. Efficient Phase Estimation for Interferogram Stacks. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4109–4125. [Google Scholar] [CrossRef]
- Samiei-Esfahany, S.; Martins, J.E.; van Leijen, F.; Hanssen, R.F. Phase Estimation for Distributed Scatterers in InSAR Stacks Using Integer Least Squares Estimation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5671–5687. [Google Scholar] [CrossRef] [Green Version]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A New Algorithm for Surface Deformation Monitoring Based on Small Baseline Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Li, S.; Xu, W.; Li, Z. Review of the SBAS InSAR Time-Series Algorithms, Applications, and Challenges. Geod. Geodyn. 2022, 13, 114–126. [Google Scholar] [CrossRef]
- Yunjun, Z.; Fattahi, H.; Amelung, F. Small Baseline InSAR Time Series Analysis: Unwrapping Error Correction and Noise Reduction. Comput. Geosci. 2019, 133, 104331. [Google Scholar] [CrossRef] [Green Version]
- Hu, F.; Wu, J.; Chang, L.; Hanssen, R.F. Incorporating Temporary Coherent Scatterers in Multi-Temporal InSAR Using Adaptive Temporal Subsets. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7658–7670. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Colesanti, C.; Perissin, D.; Prati, C.; Rocca, F. Evaluating the Effect of the Observation Time on the Distribution of SAR Permanent Scatterers. In Proceedings of the 3rd International Workshop ERS SAR Interferometry (FRINGE), Frascati, Italy, 1–5 December 2003; pp. 1–5. [Google Scholar]
- Dogan, O.; Perissin, D. Detection of Multitransition Abrupt Changes in Multitemporal SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3239–3247. [Google Scholar] [CrossRef]
- Brcic, R.; Adam, N. Detecting Changes in Persistent Scatterers. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 117–120. [Google Scholar]
- Ansari, H.; Adam, N.; Brcic, R. Amplitude Time Series Analysis in Detection of Persistent and Temporal Coherent Scatterers. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 3–18 July 2014; pp. 2213–2216. [Google Scholar]
- Monti-Guarnieri, A.V.; Brovelli, M.A.; Manzoni, M.; d’Alessandro, M.M.; Molinari, M.E.; Oxoli, D. Coherent Change Detection for Multipass SAR. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6811–6822. [Google Scholar] [CrossRef]
- Dommain, R.; Couwenberg, J.; Glaser, P.H.; Joosten, H.; Suryadiputra, I.N.N. Carbon Storage and Release in Indonesian Peatlands since the Last Deglaciation. Quat. Sci. Rev. 2014, 97, 1–32. [Google Scholar] [CrossRef]
- Hendon, H.H. Indonesian Rainfall Variability: Impacts of ENSO and Local Air–Sea Interaction. J. Clim. 2003, 16, 1775–1790. [Google Scholar] [CrossRef]
- Saji, N.H.; Goswami, B.N.; Vinayachandran, P.N.; Yamagata, T. A Dipole Mode in the Tropical Indian Ocean. Nature 1999, 401, 360–363. [Google Scholar] [CrossRef]
- Yamanaka, M.D. Global and Indonesian Climate in 2019. In Toward the Regeneration of Tropical Peatmland Societies; Newsletter; Tropical Peatland Society Project at Research Institute for Humanity and Nature: Kyoto, Japan, 2020; Volume 8, pp. 6–7. [Google Scholar]
- Takeuchi, W.; Hirano, T.; Roswintiarti, O. Estimation Model of Ground Water Table at Peatland in Central Kalimantan, Indonesia. In Tropical Peatland Ecosystems; Springer: Tokyo, Japan, 2016; pp. 445–453. [Google Scholar] [CrossRef]
- Park, H.; Takeuchi, W.; Ichii, K. Satellite-Based Estimation of Carbon Dioxide Budget in Tropical Peatland Ecosystems. Remote Sens. 2020, 12, 250. [Google Scholar] [CrossRef]
- Villarroya-Carpio, A.; Lopez-Sanchez, J.M.; Engdahl, M.E. Sentinel-1 Interferometric Coherence as a Vegetation Index for Agriculture. Remote Sens. Environ. 2022, 280, 113208. [Google Scholar] [CrossRef]
- Morishita, Y.; Hanssen, R.F. Temporal Decorrelation in L-, C-, and X-Band Satellite Radar Interferometry for Pasture on Drained Peat Soils. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1096–1104. [Google Scholar] [CrossRef]
- De Zan, F.; Guarnieri, A.M. TOPSAR: Terrain Observation by Progressive Scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Fattahi, H.; Agram, P.; Simons, M. A Network-Based Enhanced Spectral Diversity Approach for TOPS Time-Series Analysis. IEEE Trans. Geosci. Remote Sens. 2017, 55, 777–786. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.W.; Zebker, H.A. Phase Unwrapping for Large SAR Interferograms: Statistical Segmentation and Generalized Network Models. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1709–1719. [Google Scholar] [CrossRef] [Green Version]
- Aditiya, A.; Efendi, J.; Arief Syafii, M. InaCORS: Infrastructure of GNSS CORS in Indonesia. In Proceedings of the FIG Congress 2014, Kuala Lumpur, Malaysia, 16–21 June 2014. [Google Scholar]
- Tough, J.A.; Blacknell, D.; Quegan, S. A Statistical Description of Polarimetric and Interferometric Synthetic Aperture Radar Data. Proc. R. Soc. London. Ser. A Math. Phys. Sci. 1995, 449, 567–589. [Google Scholar] [CrossRef]
- Jolivet, R.; Grandin, R.; Lasserre, C.; Doin, M.P.; Peltzer, G. Systematic InSAR Tropospheric Phase Delay Corrections from Global Meteorological Reanalysis Data. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef] [Green Version]
- Fattahi, H.; Amelung, F. DEM Error Correction in InSAR Time Series. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4249–4259. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Kluwer: Dordrecht, The Netherlands, 2001; ISBN 9780792369455. [Google Scholar]
- Miettinen, J.; Shi, C.; Liew, S.C. 2015 Land Cover Map of Southeast Asia at 250 m Spatial Resolution. Remote Sens. Lett. 2016, 7, 701–710. [Google Scholar] [CrossRef]
- Descals, A.; Wich, S.; Meijaard, E.; Gaveau, D.L.A.; Peedell, S.; Szantoi, Z. High-Resolution Global Map of Smallholder and Industrial Closed-Canopy Oil Palm Plantations. Earth Syst. Sci. Data 2021, 13, 1211–1231. [Google Scholar] [CrossRef]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Izumi, Y.; Takeuchi, W.; Widodo, J.; Sulaiman, A.; Awaluddin, A.; Aditiya, A.; Razi, P.; Anggono, T.; Sumantyo, J.T.S. Temporal Subset SBAS InSAR Approach for Tropical Peatland Surface Deformation Monitoring Using Sentinel-1 Data. Remote Sens. 2022, 14, 5825. https://doi.org/10.3390/rs14225825
Izumi Y, Takeuchi W, Widodo J, Sulaiman A, Awaluddin A, Aditiya A, Razi P, Anggono T, Sumantyo JTS. Temporal Subset SBAS InSAR Approach for Tropical Peatland Surface Deformation Monitoring Using Sentinel-1 Data. Remote Sensing. 2022; 14(22):5825. https://doi.org/10.3390/rs14225825
Chicago/Turabian StyleIzumi, Yuta, Wataru Takeuchi, Joko Widodo, Albertus Sulaiman, Awaluddin Awaluddin, Arif Aditiya, Pakhrur Razi, Titi Anggono, and Josaphat Tetuko Sri Sumantyo. 2022. "Temporal Subset SBAS InSAR Approach for Tropical Peatland Surface Deformation Monitoring Using Sentinel-1 Data" Remote Sensing 14, no. 22: 5825. https://doi.org/10.3390/rs14225825
APA StyleIzumi, Y., Takeuchi, W., Widodo, J., Sulaiman, A., Awaluddin, A., Aditiya, A., Razi, P., Anggono, T., & Sumantyo, J. T. S. (2022). Temporal Subset SBAS InSAR Approach for Tropical Peatland Surface Deformation Monitoring Using Sentinel-1 Data. Remote Sensing, 14(22), 5825. https://doi.org/10.3390/rs14225825