1. Introduction
In the conventional radar signal processing, the cascade of matched filter and moving target detection (MTD) method has been widely applied by modern coherent radar. As the conventional coherent integration method, the MTD method implies the assumption that the target is only in one single range cell during the coherent processing interval (CPI). For high-speed weak targets like unmanned aerial vehicles, due to their low signal-to-noise ratios (SNRs), increasing CPI helps improve the SNRs of high-speed weak targets, but the targets will cross multiple range cells during the CPI. At the same time, modern high-resolution radar aggravates the targets’ across range cells (ARC) problem due to the targets’ velocities, so the conventional coherent integration method is facing serious performance degradation.
To solve these problems, various long-time coherent integration (i.e., long-time focusing) methods have been proposed to form a cascade with matched filter and implement time-range two-dimensional focusing, such as the long-time coherent integration method based on Keystone transform [
1,
2,
3,
4], three-dimensional matched filter [
5], etc. In these early methods, the processing flows are complex, and most of the methods correct range migration and realize coherent integration in sequence. For linear moving targets, Professor Jia Xu systematically proposed a long-time focusing method based on Radon-Fourier transform [
6,
7,
8] for the first time, which solves the ARC problems of moving targets. RFT can be regarded as a generalized Doppler filter. As a generalized form of RFT, generalized RFT (GRFT) can be used for focusing of various motion styles theoretically [
6,
9]. It is known that the two drawbacks of RFT are blind-speed sidelobes (BSSL) and the computational cost of the search of two-dimensional parameters [
7,
8]. For the first drawback, improving the range resolution, increasing the number of coherent pulses, and weighting the Doppler filter of RFT are beneficial to suppress BSSL [
7]. For the second drawback, fast implementation methods based on fast Fourier transform and particle swarm optimization algorithm are proposed respectively [
8,
10]. Afterward, the RFT method is further extended to wideband radar field and array signal processing [
11,
12]. Professor Xu further proposed the idea of Space-Time-Frequency Focus-Before-Detection (STF-FBD) on the basis of RFT theory [
13], which utilizes multi-dimensional coherent integration to achieve the optimal energy focusing, target detection, parameter estimation, maneuver tracking, feature extraction and target recognition. Through the joint processing of space (i.e., array), velocity (i.e., pulse) and range (i.e., waveform), the focusing of target’s energy in multi-dimensional space is achieved, which laid a theoretical and technical foundation for improving radar target detection in complex environment. To reduce the computational cost of long-time focusing, Jia Xu divides the long CPI into several sub-apertures, and utilizes moving target detection (MTD) for coherent integration in every sub-aperture, then utilizes non-coherent integration between sub-apertures [
14]. However, the method in [
14] only considers a single high-speed maneuvering target, without considering the impact of multiple targets. Jia Xu’s team further combs the challenges and the latest research progress of long-time focusing methods related to Focus-Before-Detection (FBD) [
15,
16]. It can be seen that relevant research based on FBD theory continue to emerge and FBD has become a hot research field in recent years. Xiaolong Chen et al. consider the Doppler spectrum broadening caused by acceleration, and propose a Radon-Fractional Fourier transform (RFRFT) method for the detection of maneuvering targets [
17] and a kind of Radon-Linear canonical transform method for the detection of targets with micromotion in sea clutter [
18].
Because the RFT method is aimed at high-speed moving targets, the searching interval of velocity used in the RFT method usually exceeds the range of maximum unambiguous velocity in the MTD method. Since RFT can be regarded as the expansion of Fourier transform, it will cause velocity sidelobes masking other weak targets. In addition, RFT is not an adaptive processing method. Xu and Yan extend the RFT to the adaptive clutter suppression [
19], and then propose sub-aperture adaptive RFT (SA-ARFT) method to relax the requirements for the amount of independent and identically distributed data and reduce the computational cost. However, the adaptive method in [
19] is aimed at clutter suppression, and does not have the ability of adaptive suppression for the jamming targets in the training samples. Pengjie You et al. also consider the adaptive GRFT in clutter background, and derive the Cramer-Rao lower bound of parameter estimation [
20]. Its essence is same as that in [
19], so it is also limited by the independent and identically distributed training samples, and does not have the ability to adaptively suppress jamming targets. Zegang Ding utilizes adaptive RFT (ARFT) method after dividing the parameter space into subspaces, and balances the computational cost and detection performance by adjusting the length of every subspace [
21]. The ARFT method uses the inverse of clutter covariance matrix to form clutter notch and suppress clutter, which is helpful to focus the target energy in a clutter background. However, when the target’s velocity is too high, which causes the fluctuation of amplitude between pulses and makes the number of effective pulses available for long-time focusing is limited, the velocity resolution of the ARFT method will decrease, and the performance of focusing will degrade.
On the other hand, the mathematical model of Doppler estimation is similar to that of direction of arrival (DOA) estimation, so the research related to DOA estimation can also be used to solve the problems of Doppler (velocity) sidelobes suppression and velocity resolution. Conventional DOA estimation methods such as MUSIC [
22], root-MUSIC [
23] and ESPRIT [
24] use the spatial snapshots to calculate the sample covariance matrix (SCM) to estimate the unknown spatial covariance matrix, and use SCM to estimate the number and direction of signal sources. Professor Blunt proposes a reiterative super-resolution (RISR) method, which was originally used for DOA estimation in array signal processing [
25,
26]. The RISR method is based on the minimum mean square error (MMSE) criterion. The method does not need the prior knowledge of the number of signal sources, and can automatically determine the number, direction, and power of signal sources. Given the information about the spatial covariance of noise and one snapshot, the RISR method iteratively updates the structured MMSE filter bank by using the previous estimation of spatial power distribution, and applies the filter bank to the echo signal to update the estimation of spatial power distribution. Based on the same theoretical basis, Professor Blunt applies the RISR method to time dimension to get high-resolution frequency estimation [
26], proposes adaptive pulse compression (APC) method in the range dimension [
27], and proposes space-time adaptive processing [
28], time-range adaptive processing [
29], which are adaptive methods combining different dimensions. Almost at the same time, Professor Jian Li proposed a nonparametric iterative adaptive approach (IAA) [
30]. The IAA method comprehensively considers the range-Doppler two-dimensional joint estimation, and its essential idea is the same as that of the APC method [
31]. Although the IAA method iterates over the whole echo data and has a large amount of computational cost, it does effectively improve the resolution and estimation accuracy in active sensing such as range-Doppler imaging and passive sensing such as underwater acoustic measurements.
From the above analysis, it can be seen that the idea of iterative adaptive processing in the RISR method (or APC method) and IAA method has the ability of sidelobes suppression, and the ability is conducive to energy focusing. However, the existing relevant methods of IAA also imply the assumption that the target is only located in one range cell within the CPI, and the IAA method considering the ARC problem has not been put forward. In order to solve the sidelobes masking problem in range-velocity domain, this paper proposes a time-range adaptive focusing method (which is named APC-IARFT for short) based on APC and iterative adaptive Radon-Fourier transform (IARFT). Based on the concept of focusing proposed by Jia Xu [
15,
16], this method first utilizes the APC method to realize the adaptive focusing in range dimension and suppress range sidelobes of strong targets, then uses the IARFT method which is first proposed in this paper to realize the long-time adaptive focusing and suppress velocity sidelobes. The IARFT method draws on the idea of iterative adaptive processing mentioned in both the RISR method and IAA method. This method is based on the minimum variance distortionless response (MVDR) criterion [
32], and an adaptive filter is estimated for the echo signal of each range-velocity grid in the method [
33]. Through the cascade of APC method and IARFT method, APC-IARFT method adaptively suppresses range-velocity sidelobes of strong targets in the range-velocity two-dimensional output, so as to achieve better focusing and accurately obtain the range and velocity information of weak targets.
APC-IARFT method consists of range-dimension adaptive focusing and velocity-dimension adaptive focusing, so the content of this paper is organized as follows. In
Section 2, the signal model of pulse trains is constructed. In
Section 3, the APC method is utilized in range dimension to achieve range-dimension adaptive focusing and obtain the data of pulse trains processed by APC. In
Section 4, IARFT method is utilized to process the data obtained by APC, so as to obtain the final output of the APC-IARFT method. In
Section 5, we discuss the termination conditions of the iteration and computational cost about IARFT method. Finally, the performance of the APC-IARFT method is verified by experiments in
Section 6.
2. Signal Model
Suppose that the waveform of the pulse transmitted in the radar system is recorded as vector
s. There are
N points in the pulse,
,
is pulse width,
is sampling frequency.
and
is represented as
where
is the sampling interval, 0 ≤
n ≤
N − 1, and rect(·) is the rectangular window.
modulation(·) is the modulation form of pulse signal, which can be linear frequency modulation, nonlinear frequency modulation or other complex modulation forms. This paper is mainly based on linear frequency modulation. When a high-speed target moves across range cells within CPI
T, its trajectory is recorded as
r(
t) [
6].
where
t is the time variable in [−
T/2,
T/2].
is the position of the target at time 0, and
is the radial velocity of the target. Since the high-speed movement of the target will affect the amplitude and phase of its radar cross section, the size of
T is limited in order to ensure that the target energy can be coherently integrated. Suppose the high-order motion of the target [
34,
35] in the limited CPI
T is not obvious, so
remains unchanged.
After down conversion and analog-to-digital conversion, the radar received echo data matrix
Y of coherent pulse trains in CPI
T can be expressed as
Y =
X +
N.
X is the matrix composed of targets’ echo signal, and
N is the matrix composed of noise, clutter, and jamming. Set pulse repetition interval (PRI) as
TPRI,
Np =
T/
TPRI is the number of coherent pulses. There are
D range cells in the scene, therefore
Y is a
Np ×
D-dimensional matrix composed of
Np row vectors, representing the echo data of
Np PRIs within
T. It is assumed that the echo vector signal
y(m,d) (
y(m,d) Y) of the
d-th range cell (1 ≤
d ≤
D) in the
m-th PRI (1 ≤
m ≤
Np) before conventional pulse compression (i.e., matched filter) can be expressed as
where
x(m,d) = [
x(m,d),
x(m,d−1),…,
x(m,d−N+1)]
T represents the
N-point continuous sampling of the real scene in the
m-th PRI and
x(m,d) is the real scattering coefficient of the
d-th range cell in the
m-th PRI.
n(m,d) is the additive Gaussian white noise at the
d-th range cell in the
m-th PRI and (·)
T is the transpose operation.
Suppose
YPC is the data matrix of the coherent pulse trains processed by conventional pulse compression (i.e., matched filter), and the echo vector signal
(
YPC) of the
d-th range cell in the
m-th PRI after matched filter can be expressed as
where
y(m,d) = [
y(m,d),
y(m,d+1), …,
y(m,d+N−1)]
T is the
N-point continuous sampling of the echo pulse corresponding to the
d-th range cell in the
m-th PRI and
,
.
is the noise vector and (·)
H is the conjugate transpose operation.
3. Range-Dimension Adaptive Focusing Based on Adaptive Pulse Compression
The results of matched filter are often affected by the autocorrelation and cross-correlation of the transmitted signals. The weak target is easy to be covered by strong targets’ range sidelobes, and the resolution of matched filter is limited. In order to achieve better range-dimension pulse compression and energy focusing, the adaptive filter designed in APC method for
y(m,d) is expressed as follows
where
(
YAPC) is the echo data of the
d-th range cell in the
m-th PRI processed by APC method and
YAPC is the data matrix of the coherent pulse trains processed by APC method.
is the weight vector of APC method which corresponds to the
d-th range cell in the
m-th PRI. Based on MVDR criterion, the cost function of weight vector is as follows [
27,
32],
where
is the cost function of APC method which corresponds to the
d-th range cell in the
m-th PRI.
is the real scattering coefficient of the
d-th range cell in the
m-th PRI, and E[·] is the expectation operator. According to Equation (6), the Lagrange multiplier method is used to minimize
[
36]. Assuming that the scattering coefficient remains unchanged in
T, the coefficients in different range cells are not correlated with each other, and are not correlated with noise. The expression of
can be obtained as
where
is the echo covariance matrix, and
is the covariance matrix of noise, which can be simplified as
(
is the power of noise).
is the signal covariance matrix [
37],
where
is the power estimation of the (
d +
p)-th range cell in the
m-th PRI, −
N + 1 ≤
p ≤
N − 1 [
27,
38].
contains the elements of the waveform
s shifted by
p samples,
Repeat the above process for the range-dimension echo signal received in all PRIs to obtain data YAPC of the coherent pulse trains, then the range-dimension pulse compression and adaptive focusing are completed. So YAPC obtained by APC method can be viewed as the ideal input for the IARFT method.
4. Long-Time Adaptive Focusing Based on Iterative Adaptive Radon-Fourier Transform
The idea of iterative adaptive processing in the IARFT method derives from the idea of IAA, which is originally used for signal source localization in array signal processing [
30]. At present, IAA has been extended to Doppler-dimension processing, range-dimension processing, and other fields such as multi-dimensional signal processing. As a nonparametric method derived based on the weighted least squares criterion [
30], IAA aims to solve the estimation problem of coefficients in the following linear models [
39]:
where
is the steering vector and
is the noise vector. So as to realize IARFT method, we need to build a linear model which is in the same form as Equation (10) based on data
YAPC in
Section 3. This linear model needs to be related to the two parameters: range and velocity. In this section, we need to first discretize the parameter space of range and velocity into two-dimensional grids, and then use the two-dimensional grids to establish the linear model like Equation (10). Only in this way can the filter of the IARFT method be deduced according to the linear model.
4.1. Setting of Range-Velocity Grid in IARFT Method
The long-time adaptive focusing method based on IARFT method searches the range cells that high-speed target passes through in CPI
T to focus the target’s energy. Generally, the data
YAPC contains two parts: one part is the search area which we are interested in, and the other part is the data extraction area. The data extraction area includes the search area.
Figure 1 shows the relationship of the search area and the data extraction area in
YAPC. Set the center of the search area as
rC, and
ra stands for the range of search area. The initial position at time 0 and velocity of the target are unknown, so it is necessary to search the parameters in the searching interval of range [
rC −
ra/2,
rC +
ra/2] and searching interval of velocity [−
vmax,
vmax] [
40]. There are three targets given in
Figure 1, and their range-velocity parameters are (
rC,
vT), (
rC −
ra/2, −
vmax) and (
rC +
ra/2,
vmax) respectively. Because range resolution Δ
r = c/(2
fs) (
fs is the sampling frequency, and c is the speed of light),
Nr = ra/Δ
r is the total number of range grids covered by
ra.
rmax =
ra +
vmaxT represents the range of data extraction area, and
vmax is the maximum velocity. The search for velocity is complex, so velocity grid whose resolution is Δ
v =
λ/2
T [
6] is set to discretize the searching interval of velocity [
41,
42]. It needs to traverse
Nv = round(2
vmax/Δ
v) grids to search the correct velocity [
43,
44,
45]. In this way, there are
NrNv two-dimensional grids in the parameter space of range and velocity.
4.2. Implementation of IARFT Method
For the range-velocity grid given in
Section 4.1, IARFT method completes the long-time focusing by searching the data corresponding to the range-velocity parameter pulse by pulse. Suppose
Np × 1-dimensional vector data corresponding to range grid
i (1 ≤
i ≤
Nr) and velocity grid
q (1 ≤
q ≤
Nv) is recorded as
(all the elements of
are from the matrix
YAPC), but
does not only contain the energy of a single target whose corresponding range-velocity grid is (
i,
q). As shown in
Figure 2, it is assumed that there are four targets in the search area, which are recorded as T1, T2, T3 and T4 respectively. Their corresponding range-velocity grids are (
i,
q), (
j2,
k2), (
j3,
k3), (
j4,
k4) respectively, and 1 ≤
i ≠
j2 ≠
j3 ≠
j4 ≤
Nr, 1 ≤
q ≠
k2 ≠
k3 ≠
k4 ≤
Nv.
Assuming that the energy of the target has no effect on the adjacent range cells, i.e., there is no range sidelobe after APC. When searching data
of target T1 according to the parameters (
i,
q), since the trajectory of T1 overlaps with the trajectories of targets T2, T3 and T4, theoretically the data
is the result of the superposition of the echo of target T1 that we are concerned about and the echo of other targets whose trajectories overlap with the trajectory of T1,
Equation (11) has a similar expression to Equation (10), so it conforms to the signal model of IAA. is the real scattering coefficient corresponding to the range-velocity grid (j,k), especially is the real scattering coefficient of the range-velocity grid (i,q). is the time-dimension steering vector determined by velocity v(k), especially is the time-dimension steering vector determined by velocity grid q. is the Np-dimensional zero mean complex Gaussian vector contained in , which also obeys the random distribution of noise covariance , and is Np × Np-dimensional identity matrix. is the Hadamard product operation and is the Np × 1-dimensional indication vector that describes whether the trajectory of the target whose gird is (j,k) overlaps with the trajectory of target T1.
When the trajectory of another target overlaps with the trajectory of target T1 during the
Np PRIs, the value of the corresponding position in the indication vector is 1. In the case that the trajectories of target T2, T3, and T4 overlap with the trajectory of target T1 in
Figure 3, the overlap will occur only in some specific PRIs due to discrete sampling. If overlap occurs in a specific PRI, the value of corresponding position in the indicator vector is assigned as 1, specifically
indicator[(
i,
q),(
j2,k2)] = [1, 0, …, 0]
T,
indicator[(
i,
q),(
j3,
k3)] = [0, …, 0, 1, 0, …, 0]
T,
indicator[(
i,
q),(
j4,
k4)] = [0, …, 0, 1]
T. When there is no overlap between target T1 and the target whose gird is (
j,
k), the corresponding indication vector
indicator[(
i,
q),(
j,
k)] is a zero vector.
Since the essence of the APC method is the same as that of the IAA method [
31], we can use APC method as a reference to estimate the covariance matrix according to the signal model of
in an iterative way, and deduce the optimal weight vector of the IARFT method.
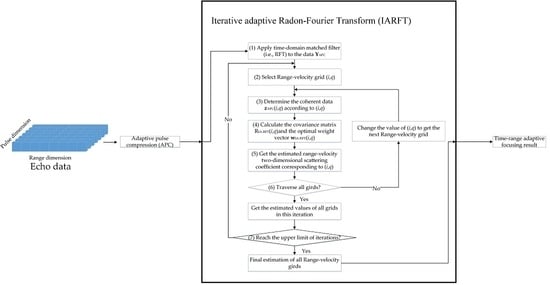
Figure 4 is the flow chart of the IARFT method. According to
Figure 4, the IARFT method mainly includes the following steps:
- (1)
First, apply RFT to the data
YAPC. The searching interval of range and searching interval of velocity have been discretized into
NrNv range-velocity grids. Without considering the intra-pulse Doppler frequency, the discrete form of RFT in range-velocity two-dimensional parameter space is expressed as [
46,
47],
where
i and
q are discrete variables referring to
i-th range gird and
q-th velocity grid respectively.
r(
i) =
rC −
ra/2 +
iΔ
r, v(
q) = −
vmax +
qΔ
v.
represents the rounding approximation operation, and
Hv(q)(
m) is the Doppler filter bank [
48,
49],
where
is the wavelength of the carrier. The result of RFT is used as the initial estimation of all range-velocity grids’ scattering coefficients, so RFT needs to be applied at the beginning of the IARFT method.
- (2)
Assign a value to the range-velocity grid (i,q). Since IARFT method needs to traverse all grids, grid (i,q) generally starts with grid (1,1) and ends with grid (Nr,Nv) in one iteration.
- (3)
According to the range cell and velocity corresponding to the specific range-velocity grid (i,q), the trajectory within the CPI T is determined, and the coherent data is also determined.
- (4)
IARFT method derives the optimal filter by constructing the cost function. According to MVDR criterion, the cost function of range-velocity grid (i,q) is defined as,
where
is the cost function of range-velocity grid (
i,
q). E(·) is the expectation operation, and
is the time-dimension steering vector corresponding to the velocity
v(
q).
is the optimal filter weight vector in the IARFT method. Using the Lagrange multiplier method,
is rewritten as,
where
represents Lagrange factor and Re(·) represents real part of complex number. Calculate the partial derivative of
with respect to
and minimize the cost function
by making the partial derivative with respect to
equal to zero, we can get,
where (·)* refers to conjugation. Assuming that the targets and noise of each range-velocity grid are independent of each other, and the targets of different range-velocity grids are independent of each other,
can be expressed as
where
refers to the expected power value of the range-velocity grid
and
is the estimated scattering coefficient of the range-velocity grid (
i,
q). The covariance matrix of the range-velocity grid obtained from Equation (18) is,
According to Equation (11),
refers to all other range-velocity grids except the grid
of interest. Blindly traversing the trajectories of all grids will cause a large number of indication vectors equal to zero vector and increase the computational cost. Considering
v(
q),
v(
k)
[−
vmax,
vmax], once |
r(
j) −
r(
i)|>
vmaxT, the trajectories corresponding to
will not overlap with the trajectory corresponding to
. Thus, we set
Nc as,
Then we set matrix
to satisfy,
According to Equations (11) and (22),
can be expressed as,
Because it is assumed that the targets of different range-velocity grids are independent of each other and the targets are independent of the noise,
is expressed as,
The noise is assumed to be additive Gaussian white noise, and the noise covariance matrix
R(
i,
q) can be simplified as
. Since Equation (16) requires,
Thus, the optimal weight vector of IARFT method via MVDR criterion can be obtained as,
Note that is unknown, so we need to use the estimation instead. In the first iteration of IARFT method, the result of RFT method in step (1) needs to be used in Equation (27) as the initial estimated scattering coefficient of the range-velocity two-dimensional gird to calculate and .
- (5)
Since the optimal weight vector
is obtained, the estimated scattering coefficient
of the range-velocity two-dimensional gird
is,
- (6)
Judge whether all the range-velocity grids have been traversed in this iteration. If no, assign another range-velocity grid as (i,q) and continue to estimate the scattering coefficient of the range-velocity two-dimensional gird (i,q) through Equations (27) and (28). If yes, we will get the estimated scattering coefficients of all grids in this iteration and jump to step (7).
- (7)
Judge whether the upper limit of iteration LoopIARFT has been reached in this iteration. If no, jump to step (2) to start a new iteration, and continue to estimate the scattering coefficient of the range-velocity two-dimensional gird (i,q). If yes, the result obtained in step (6) can be the final estimation of the range-velocity two-dimensional scattering coefficients in IARFT method.
After LoopIARFT iterations, IARFT method can suppress the velocity sidelobes of strong targets, and obtain a better range-velocity two-dimensional output, which is the final output of APC-IARFT method.
6. Experimental Results
This section introduces some numerical simulation experiments to prove the effectiveness of the IARFT method in suppressing velocity sidelobes and effectiveness of the APC-IARFT method in suppressing range-velocity sidelobes by comparing with other methods. The methods involved in the comparison include cascade of conventional pulse compression and the RFT method, cascade of conventional pulse compression and the ARFT method, cascade of conventional pulse compression and the IARFT method and the APC-IARFT method (for convenience of description, the first three methods are directly referred to as the RFT method, ARFT method and IARFT method). The parameters of the radar system are set as follows: carrier frequency is 1 GHz, pulse repetition frequency (PRF) is 1000 Hz, bandwidth
B of linear frequency modulation signal is 15 MHz, pulse width
Tp is 5 μs. Sampling frequency
fs = 30 Mhz (so
N =
Tp;∙
fs = 150). Since the coherence between pulses cannot be guaranteed by staring at the high-speed target for a long CPI
T, the CPI
T is set as 0.05 s (i.e.,
Np is 50). The center
rC of the search area is located at 100 km,
vmax = 540 m/s, and the range of the search area
ra = 300 m.
rmax = 327 m, Δ
r = 5 m,
Nr = 60, Δ
v = 3 m/s,
Nv = 360. The power of noise is set as −20 dB. The number of iterations in the APC method is set as 2 times, and the number of iterations in the IARFT method is set as 6 times. In this experiment, two kinds of average peak sidelobe level (APSL) between the target and the neighboring grids are set to help analyze the performance of different methods, which are named as APSL
2D and APSL
v respectively. The calculation rule of APSL
2D is the ratio between amplitude of grid (
i,
q) and average amplitude of girds whose range is within [
rC −
ra/2,
rC +
ra/2], and velocity is within
v(
q) ± 75 m/s (75 m/s is the velocity corresponding to PRF/2 in the experiment) meanwhile,
The calculation rule of APSL
v is is the ratio between amplitude of grid (
i,
q) and average amplitude of girds whose velocity is within
v(
q) ± 75 m/s,
where
is the estimatied scattering coefficient of grid (
i,
q), and
is the estimatied scattering coefficient of neighboring grid. mean(·) is the mean function. Both APSL
2D and APSL
v require multiple experiments to calculate the average values.
6.1. Scenario 1: Point Target with High Signal-To-Noise Ratio
There are 2 targets set in Scenario 1, whose basic information is listed in
Table 1.
Figure 5 shows the two-dimensional stereogram of the four methods’ range-velocity output. It should be noted that the searching interval of velocity [−
vmax,
vmax] used in all the above methods exceeds the range of maximum unambiguous velocity (the range of maximum unambiguous velocity corresponding to PRF in the scenarios is 150 m/s), so the energy will be focused every 150 m/s in velocity dimension, which is the reason for the blind speed sidelobes (BSSL) [
7]. However, the data searched by other blind speeds is inaccurate and cannot be completely coherent, so the BSSL cannot achieve the focusing result comparable to the main lobe of the target. In
Figure 5a, the main lobe and the BSSL of Target 1 can be clearly seen. The sidelobes of target 1 completely cover the main lobe of Target 2. It can also be clearly seen that there is a certain low-velocity region around the main lobe, and the suppression of velocity sidelobes is relatively obvious in this low-velocity region. The suppression of velocity sidelobes in the low-velocity region is due to the fact that a target with the velocity in the low-velocity region will not move across the range cell during the CPI
T. In addition, the target’s velocity is different from the velocity in the low-velocity region, and the phase of time-dimension steering vector corresponding to the velocity in the low-velocity region does not match Target 1’s velocity, so the velocity in the low-velocity region cannot realize focusing. It is known that Δ
r = 5 m,
T = 0.05 s in the experiment, and the range value given by the grid refers to the actual range of the grid’s center. Δ
r/
T = 100 m/s, so ARC walking occurs when the target’s velocity is higher than 100 m/s, and the low-velocity region where the velocity sidelobes are suppressed in
Figure 5a is precisely [−100 m/s, 100 m/s]. In
Figure 5b, the limited number of coherent pulses affects the output of ARFT method. At the same time, due to the processing of clutter’s covariance matrix, the energy at the velocity of Target 1 is excavated to form a notch. The output of IARFT method in
Figure 5c is better comparing with those of RFT and ARFT. IARFT suppresses the velocity sidelobes of Target 1, so we can distinguish the main lobe of Target 2 (the position marked by the red ellipse in
Figure 5c). However, the BSSL of Target 1 in
Figure 5c is still very obvious. The APC-IARFT method is the best among the four methods. The velocity sidelobes and BSSL of Target 1 are suppressed simultaneously in
Figure 5d.
The range-velocity two-dimensional plan output processed by the RFT, ARFT, IARFT, and APC-IARFT methods is shown in
Figure 6. We can compare the differences between these methods more clearly in
Figure 6. Obviously, IARFT and APC-IARFT methods suppress the velocity sidelobes as much as possible and distinguish Target 2. The APC-IARFT method further suppresses range sidelobes comparing with the IARFT method.
Figure 7 shows the comparison of output in velocity dimension at the range cell where the target is located. The velocity-dimension output of the RFT method does achieve sidelobes suppression within [−100 m/s, 100 m/s], while the sidelobes at other velocities and the BSSL of Target 1 mask Target 2. The ARFT method does not achieve effective focusing in the velocity dimension. The IARFT and APC-IARFT methods suppress the velocity sidelobes better in
Figure 7 and the APC-IARFT method is the best of the methods.
The calculated APSL
2D and APSL
v of the targets set in Scenario 1 are listed in
Table 2, which also illustrate that APC-IARFT and IARFT methods are better than the RFT and ARFT methods, and the APC-IARFT method is the best in this scenario.
6.2. Scenario 2: Dense Target Scenario
Multiple moving targets are set in this Scenario, and the initial positions are still located at 100 km. The radial velocity, Doppler frequency and initial SNR of each moving target are shown in
Table 3.
Figure 8 shows the two-dimensional stereogram of the four methods’ range-velocity output. In
Figure 8a, the main lobe and BSSL of Target 1 can still be clearly seen, and the suppression of velocity sidelobes around the main lobe is obvious in the low-velocity region of [−100 m/s, 100 m/s]. Because Target 1 is relatively strong compared with other targets, its BSSL masks the main lobes of other targets. In
Figure 8b, the limited number of coherent pulses still affects the output of the ARFT method. Similar to
Figure 5b, due to the processing of clutter’s covariance matrix, the energy at the velocity of Target 1 in
Figure 8b is also excavated to form a notch. The performance of focusing in
Figure 8c is very obvious. The IARFT method suppresses the velocity sidelobes, and we can basically distinguish the positions of the other three targets (the positions marked by the red ellipses in
Figure 8c). However, the BSSL of Target 1 still exist in
Figure 8c, which will also affect other targets.
In the same experimental scenario, cascade of APC and IARFT will get a better output. Different from conventional pulse compression, the range sidelobes of the targets is suppressed by the APC method, which can better reduce the influence of the range sidelobes on other weak targets. The performance of focusing in
Figure 8d is more obvious than that in
Figure 8c, which not only suppresses the range sidelobes and velocity sidelobes, but also significantly suppresses the BSSL of Target 1. So, we can directly distinguish the positions of the other three targets (the positions marked by the red ellipses in
Figure 8d).
The range-velocity two-dimensional plan output of the RFT, ARFT, IARFT, and APC-IARFT methods is shown in
Figure 9. The differences between these methods can be seen more clearly in
Figure 9. Obviously, the IARFT method suppresses the velocity sidelobes as much as possible and we can basically distinguish the positions of three weak targets. Although the BSSL of Target 1 is suppressed by IARFT to some extent, it still exists. Especially in the output of the APC-IARFT method, the range-velocity sidelobes and BSSL are almost suppressed, and nearly only the target point can be seen.
Figure 10 shows the comparison of velocity-dimension output at the range cell where the target is located. The velocity-dimension output of the RFT method still achieves velocity sidelobes suppression within [−100 m/s, 100 m/s], while the sidelobes and the BSSL of Target 1 mask other weak targets. The velocity-dimension output in ARFT method does not achieve effective focusing.
Figure 10 intuitively shows that the IARFT method effectively suppresses the velocity sidelobes, so that the main lobe of weak targets can be distinguished. However, the range sidelobes of targets and the BSSL of Target 1 are still obvious in the output of the IARFT method when comparing with that of the APC-IARFT method. Thus, the APC-IARFT method is still the best of the methods and we can almost only see the main lobed of the targets in its output.
The calculated APSL
2D and APSL
v of the targets set in Scenario 2 are listed in
Table 4. We can also see that the APC-IARFT and IARFT methods are better than the RFT and ARFT methods, and the APC-IARFT method is the best in this scenario.
6.3. Scenario 3: Point Targets with Low SNR and High Speed
In Scenario 3, two fast-moving point targets are set, and their initial position is located at 100 km. The radial velocity, Doppler frequency, and initial SNR of each moving target are shown in
Table 5.
Figure 11 shows the two-dimensional stereogram of range-velocity output. In
Figure 11a, we can distinguish the main lobe and BSSL of the point targets. In
Figure 11b, the output of the ARFT method is similar to that of the RFT method, but velocity-dimension sidelobes are more serious than that in
Figure 11a due to the processing of covariance matrix in the ARFT method. It can be seen that for point targets with low SNR that the output of IARFT method is consistent with that of the RFT method. However, the output of the APC-IARFT method is intuitively better than that of the IARFT method. The range-velocity two-dimensional plan output of the RFT, ARFT, IARFT and APC-IARFT methods is shown in
Figure 12. The relative position relationship between the main lobes and BSSL in the output of different methods can be more clearly seen in
Figure 12. Due to the small number of coherent pulses in the scene, it can be seen from the output of the ARFT method that the clutter’s covariance matrix makes more obvious velocity sidelobes appear in the velocity dimension.
Figure 13 shows the comparison of velocity-dimension output at the range cell where the targets are located. The velocity-dimension output of the IARFT method, and the RFT method is basically the same, so their curves overlap with each other. In the ARFT method, there are more obvious sidelobes in the velocity dimension. The APC-IARFT method further suppress the velocity sidelobes on the basis of IARFT method. The calculated APSL
2D and APSL
v of the targets set in Scenario 4 are listed in
Table 6. According to the data comparison in
Table 6, the APC-IARFT method is still the best among the four methods.
6.4. Scenario 4: Point Target in Clutter Background
In order to illustrate the performance of the APC-IARFT method in the clutter background, two targets are set in Scenario 4, whose information is listed in
Table 7. Suppose the clutter is uniform and stationary, and its clutter-to-noise ratio (CNR) is set as 30 dB. Clutter’s amplitude obeys Gaussian distribution, and the Doppler spectral density function is Gaussian spectrum. The center of clutter’s Gaussian spectrum is 0 Hz, and the variance of velocity is 1.5 m/s, so the width of Gaussian spectrum is 10 Hz.
In the clutter background, the energy of clutter is also accumulated by the RFT method. So, we can see that after the focusing, the amplitude of clutter is higher than that of noise in
Figure 14a. However, the amplitude of clutter is lower than that of Target 1 due to the coherence of the target’s echo. The ARFT method is beneficial to the clutter background, and the clutter is suppressed in
Figure 14b. Because Target 1’s Doppler frequency is located in clutter’s spectrum, the main lobes of Target 1 and Target 2 are excavated by the processing of clutter’s covariance matrix. The IARFT method needs to utilize the output of the RFT method as the initial estimation of the range-velocity two-dimensional scattering coefficient. In the clutter background, although the velocity sidelobes of clutter can be suppressed, the IARFT method will also integrate clutter’s energy like the RFT method. In
Figure 14a,c,d clutter is not suppressed, but the ability of the IARFT method to suppress velocity sidelobes in clutter background is still stronger than that of the RFT method by comparing
Figure 14c with
Figure 14a.
Comparing
Figure 14d with
Figure 14c, the ability of APC to suppress range sidelobes and the ability of the IARFT method to suppress velocity sidelobes are still obvious. However, we find another problem through comparison. Although the APC method suppresses range sidelobes, it may change the range-dimension statistical characteristics of the clutter. After APC’s processing, the clutter becomes stronger than that in the IARFT method. In this experimental background, although the clutter in the output of the APC-IARFT method diffuses in the range dimension, the ability of the APC-IARFT method to suppress range-velocity sidelobes is still the best. According to the comparison of targets’ range-velocity sidelobes in
Figure 15 and the comparison of targets’ velocity sidelobes in
Figure 16, the results can still verify the ability of IARFT method to suppress velocity sidelobes and the ability of the APC-IARFT method to suppress range-velocity sidelobes.
The calculated APSL
2D and APSL
v of the targets set in Scenario 4 are listed in
Table 8. In the calculation of APSL
2D, the performance of the IARFT method is the best. We can see that the APC method does change the amplitude of clutter in
Figure 15. So, the values in the APC-IARFT method are lower than those in the IARFT method. In the calculation of APSL
v, it is obvious that the IARFT method is also optimal from the aspect of numerical comparison. When calculating APSL
v of Target 1, the value of the APC-IARFT method is close to those of the IARFT and RFT method. Although the output of the APC-IARFT method is not as good as that that of cascade of matched filter and IARFT method in this clutter background, it is still better than that of conventional RFT and ARFT when calculate APSL
v of Target 2, which also illustrates the advantage of the IARFT method. In addition, when calculating APSL
v of Target 2, the value in the APC-IARFT method is better than that in the IARFT method. This can also illustrate the ability of the APC-IARFT method to suppress velocity sidelobes.
7. Conclusions
By considering the coherent integration as focusing, we consider pulse compression as range-dimensional focusing and long-time coherent integration as long-time focusing. However, the matched filter has problems such as range sidelobes. RFT belongs to standard time-dimension matched filter, which will cause velocity sidelobes of strong targets. The range-velocity sidelobes caused by matched filter and RFT will mask other weak targets and affect the energy focusing and the subsequent signal processing processes such as target detection and tracking. To achieve better focusing, this paper studies the adaptive focusing of two dimensions of time and range. Firstly, the idea of the iterative adaptive approach is applied to long-time focusing, and a long-time adaptive focusing method based on iterative adaptive RFT (IARFT) is designed. Further, in order to solve the problem of two-dimensional sidelobes masking, this paper proposes a time-range adaptive focusing method (APC-IARFT for short) based on APC and IARFT. By cascading the APC method and IARFT method, the range-velocity sidelobes can be adaptively suppressed under the range-velocity grid without additional prior information.
In addition, the computational cost of the IARFT method is high, and the research on its fast implementation will be an important part of future research.
It should be noted that the IARFT method suppress the velocity sidelobes, but it does not completely suppress the clutter. In order to suppress the clutter, we think that the most feasible method is to estimate the clutter’s covariance matrix, and whiten the echo data before IARFT method. Another method is to add the estimation of clutter’s covariance matrix, i.e., add the clutter’s covariance matrix to the covariance matrix calculation of IARFT method (i.e., Equation (24) in
Section 5.2).
Furthermore, we also found that there are still some problems if the IARFT method is carried out after the APC method in the clutter background through
Section 6.4. We think that the APC method may affect the statistical characteristics of clutter in the cascaded processing. The next research content is to integrate the APC method and IARFT method into the multi-dimensional joint processing to realize the joint processing of the two methods, which can further expand the dimensions and manners of processing, and achieve the optimal processing in coherent integration of high-speed weak targets.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}