Appendix A
Table A1.
Welch’s test
p-value in scientific form showing difference in group means between optically deep and optically shallow classes over four single scene Sentinel-2 images. The results for the L1C and L2A products are highly similar. The greyed cells indicate an absence of valid data for the site. ETOPO—ETOPO1 Global Arc-Minute Elevation, GEBCO—the General Bathymetric Chart of the Oceans, SDB—Sentinel-2 image-based satellite derived bathymetry based on [
18], the I-S—ICESAT2 derived SDB based on [
51] using a pooled ICESAT2 data that was spatially split, I-S ICESAT2 which data was randomly split, I-S—ICESAT2 which data was temporally split (ICESAT-T), E-K—the European Marine Observation and Data Network dataset for
Kd PAR (EMODnet-K), E-S—the EMODnet dataset for seabed PAR (EMODnet-S).
Table A1.
Welch’s test
p-value in scientific form showing difference in group means between optically deep and optically shallow classes over four single scene Sentinel-2 images. The results for the L1C and L2A products are highly similar. The greyed cells indicate an absence of valid data for the site. ETOPO—ETOPO1 Global Arc-Minute Elevation, GEBCO—the General Bathymetric Chart of the Oceans, SDB—Sentinel-2 image-based satellite derived bathymetry based on [
18], the I-S—ICESAT2 derived SDB based on [
51] using a pooled ICESAT2 data that was spatially split, I-S ICESAT2 which data was randomly split, I-S—ICESAT2 which data was temporally split (ICESAT-T), E-K—the European Marine Observation and Data Network dataset for
Kd PAR (EMODnet-K), E-S—the EMODnet dataset for seabed PAR (EMODnet-S).
| Site | ETOPO | GEBCO | SDB | I-S | I-R | I-T | E-K | E-S |
|---|
| Bahamas | 2.8 × 10−13 | 2.2 × 10−16 | 2.2 × 10−16 | 2.2 × 10−16 | 2.2 × 10−16 | 2.2 × 10−16 | | |
| Caspian Sea | 3.1 × 10−6 | 2.2 × 10−16 | 2.2 × 10−16 | | | | | |
| Tanzania | 2.7 × 10−4 | 1.1 × 10−11 | 2.2 × 10−16 | | | | | |
| Wadden Sea | 2.2 × 10−16 | 2.2 × 10−16 | 2.2 × 10−16 | | | | 2.2 × 10−16 | 2.2 × 10−16 |
Table A2.
Mean and 95% confidence interval of the overall accuracy (OA) over four single scene Sentinel-2 L1C images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
Table A2.
Mean and 95% confidence interval of the overall accuracy (OA) over four single scene Sentinel-2 L1C images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
| Site | Threshold Type | B1B2 | B1B3 | B2B3 | Hue | Saturation | Value |
|---|
| Bahamas | CP | 0.98 ± 0.00 | 0.92 ± 0.01 | 0.82 ± 0.02 | 0.93 ± 0.02 | 0.92 ± 0.01 | 0.95 ± 0.03 |
| BA | 0.99 ± 0.00 | 0.93 ± 0.01 | 0.88 ± 0.02 | 0.94 ± 0.01 | 0.93 ± 0.01 | 0.95 ± 0.02 |
| Otsu | 0.79 ± 0.04 | 0.70 ± 0.04 | 0.68 ± 0.05 | 0.50 ± 0.07 | 0.70 ± 0.05 | 0.49 ± 0.07 |
| Caspian Sea | CP | 0.61 ± 0.05 | 0.71 ± 0.06 | 0.79 ± 0.05 | 0.16 ± 0.04 | 0.71 ± 0.06 | 0.56 ± 0.05 |
| BA | 0.59 ± 0.06 | 0.77 ± 0.06 | 0.77 ± 0.05 | 0.43 ± 0.04 | 0.77 ± 0.06 | 0.50 ± 0.06 |
| Otsu | 0.59 ± 0.05 | 0.66 ± 0.04 | NA ± NA | 0.50 ± 0.07 | 0.62 ± 0.04 | NA ± NA |
| Tanzania | CP | 0.74 ± 0.05 | 0.78 ± 0.04 | 0.79 ± 0.05 | 0.45 ± 0.05 | 0.78 ± 0.04 | 0.62 ± 0.08 |
| BA | 0.77 ± 0.07 | 0.79 ± 0.04 | 0.81 ± 0.04 | 0.51 ± 0.10 | 0.79 ± 0.04 | 0.57 ± 0.07 |
| Otsu | 0.82 ± 0.04 | 0.76 ± 0.04 | 0.79 ± 0.04 | 0.59 ± 0.08 | 0.86 ± 0.04 | NA ± NA |
| Wadden Sea | CP | 0.90 ± 0.03 | 0.94 ± 0.02 | 0.94 ± 0.02 | 0.08 ± 0.02 | 0.93 ± 0.02 | 0.85 ± 0.02 |
| BA | 0.91 ± 0.02 | 0.92 ± 0.02 | 0.93 ± 0.02 | 0.45 ± 0.04 | 0.93 ± 0.02 | 0.86 ± 0.03 |
| Otsu | 0.56 ± 0.06 | 0.89 ± 0.04 | 0.91 ± 0.04 | 0.52 ± 0.05 | 0.89 ± 0.03 | NA ± NA |
Table A3.
Mean and 95% confidence interval of the F1 score for the shallow water class over four single scene Sentinel-2 L1C images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
Table A3.
Mean and 95% confidence interval of the F1 score for the shallow water class over four single scene Sentinel-2 L1C images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
| Site | Threshold Type | B1B2 | B1B3 | B2B3 | Hue | Saturation | Value |
|---|
| Bahamas | CP | 0.98 ± 0.01 | 0.92 ± 0.02 | 0.82 ± 0.03 | 0.93 ± 0.02 | 0.92 ± 0.02 | 0.95 ± 0.03 |
| BA | 0.99 ± 0.00 | 0.93 ± 0.01 | 0.87 ± 0.02 | 0.94 ± 0.01 | 0.93 ± 0.01 | 0.95 ± 0.02 |
| Otsu | 0.74 ± 0.02 | 0.59 ± 0.04 | 0.55 ± 0.05 | 0.07 ± 0.01 | 0.58 ± 0.05 | 0.00 ± 0.00 |
| Caspian Sea | CP | 0.60 ± 0.07 | 0.71 ± 0.06 | 0.79 ± 0.04 | 0.14 ± 0.03 | 0.71 ± 0.06 | 0.55 ± 0.07 |
| BA | 0.63 ± 0.08 | 0.79 ± 0.06 | 0.79 ± 0.04 | 0.28 ± 0.16 | 0.79 ± 0.06 | 0.44 ± 0.13 |
| Otsu | 0.47 ± 0.07 | 0.56 ± 0.07 | NA ± NA | 0.08 ± 0.03 | 0.43 ± 0.08 | NA ± NA |
| Tanzania | CP | 0.74 ± 0.05 | 0.77 ± 0.05 | 0.78 ± 0.05 | 0.44 ± 0.04 | 0.77 ± 0.05 | 0.65 ± 0.06 |
| BA | 0.74 ± 0.06 | 0.77 ± 0.04 | 0.80 ± 0.04 | 0.43 ± 0.04 | 0.77 ± 0.04 | 0.58 ± 0.03 |
| Otsu | 0.78 ± 0.03 | 0.76 ± 0.05 | 0.78 ± 0.05 | 0.19 ± 0.02 | 0.82 ± 0.03 | NA ± NA |
| Wadden Sea | CP | 0.89 ± 0.04 | 0.93 ± 0.03 | 0.94 ± 0.03 | 0.09 ± 0.04 | 0.93 ± 0.03 | 0.83 ± 0.02 |
| BA | 0.90 ± 0.03 | 0.92 ± 0.02 | 0.92 ± 0.03 | 0.24 ± 0.18 | 0.92 ± 0.02 | 0.85 ± 0.02 |
| Otsu | 0.17 ± 0.06 | 0.89 ± 0.04 | 0.91 ± 0.04 | 0.03 ± 0.03 | 0.86 ± 0.04 | NA ± NA |
Table A4.
Mean and 95% confidence interval of the Matthews correlation coefficient (MCC) over four single scene Sentinel-2 L1C images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
Table A4.
Mean and 95% confidence interval of the Matthews correlation coefficient (MCC) over four single scene Sentinel-2 L1C images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
| Site | Threshold Type | B1B2 | B1B3 | B2B3 | Hue | Saturation | Value |
|---|
| Bahamas | CP | 0.96 ± 0.01 | 0.84 ± 0.02 | 0.65 ± 0.04 | 0.85 ± 0.03 | 0.84 ± 0.02 | 0.89 ± 0.05 |
| BA | 0.97 ± 0.00 | 0.87 ± 0.02 | 0.77 ± 0.04 | 0.89 ± 0.02 | 0.87 ± 0.02 | 0.90 ± 0.04 |
| Otsu | 0.64 ± 0.04 | 0.51 ± 0.04 | 0.48 ± 0.05 | 0.13 ± 0.02 | 0.50 ± 0.05 | 0.00 ± 0.00 |
| Caspian Sea | CP | 0.25 ± 0.13 | 0.44 ± 0.12 | 0.60 ± 0.09 | −0.68 ± 0.07 | 0.44 ± 0.12 | 0.13 ± 0.12 |
| BA | 0.19 ± 0.12 | 0.56 ± 0.12 | 0.57 ± 0.08 | 0.08 ± 0.04 | 0.56 ± 0.12 | 0.08 ± 0.08 |
| Otsu | 0.23 ± 0.11 | 0.37 ± 0.09 | NA ± NA | 0.14 ± 0.03 | 0.33 ± 0.07 | NA ± NA |
| Tanzania | CP | 0.48 ± 0.09 | 0.56 ± 0.09 | 0.57 ± 0.09 | −0.06 ± 0.10 | 0.55 ± 0.09 | 0.27 ± 0.13 |
| BA | 0.57 ± 0.08 | 0.57 ± 0.08 | 0.60 ± 0.08 | 0.21 ± 0.10 | 0.57 ± 0.08 | 0.19 ± 0.11 |
| Otsu | 0.63 ± 0.05 | 0.52 ± 0.10 | 0.57 ± 0.09 | 0.24 ± 0.03 | 0.71 ± 0.05 | NA ± NA |
| Wadden Sea | CP | 0.82 ± 0.05 | 0.87 ± 0.04 | 0.89 ± 0.04 | −0.85 ± 0.03 | 0.87 ± 0.04 | 0.70 ± 0.04 |
| BA | 0.82 ± 0.04 | 0.85 ± 0.03 | 0.86 ± 0.03 | −0.01 ± 0.03 | 0.85 ± 0.03 | 0.71 ± 0.05 |
| Otsu | 0.22 ± 0.05 | 0.8 ± 0.07 | 0.84 ± 0.07 | 0.06 ± 0.05 | 0.79 ± 0.05 | NA ± NA |
Table A5.
Mean and 95% confidence interval of the overall accuracy (OA) over four single scene Sentinel-2 L2A images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
Table A5.
Mean and 95% confidence interval of the overall accuracy (OA) over four single scene Sentinel-2 L2A images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
| Site | Threshold Type | B1B2 | B1B3 | B2B3 | Hue | Saturation | Value |
|---|
| Bahamas | CP | 0.96 ± 0.01 | 0.89 ± 0.02 | 0.80 ± 0.02 | 0.98 ± 0.01 | 0.88 ± 0.02 | 0.93 ± 0.03 |
| BA | 0.97 ± 0.00 | 0.90 ± 0.02 | 0.84 ± 0.02 | 0.98 ± 0.00 | 0.89 ± 0.02 | 0.95 ± 0.02 |
| Otsu | 0.96 ± 0.01 | 0.82 ± 0.04 | 0.48 ± 0.06 | 0.53 ± 0.07 | 0.76 ± 0.04 | 0.48 ± 0.07 |
| Caspian Sea | CP | 0.65 ± 0.06 | 0.85 ± 0.04 | 0.91 ± 0.02 | 0.91 ± 0.02 | 0.35 ± 0.05 | 0.66 ± 0.05 |
| BA | 0.61 ± 0.05 | 0.84 ± 0.03 | 0.91 ± 0.02 | 0.91 ± 0.02 | 0.38 ± 0.05 | 0.65 ± 0.06 |
| Otsu | 0.54 ± 0.06 | 0.60 ± 0.06 | 0.52 ± 0.07 | 0.49 ± 0.07 | 0.39 ± 0.06 | NA ± NA |
| Tanzania | CP | 0.82 ± 0.03 | 0.84 ± 0.04 | 0.81 ± 0.04 | 0.85 ± 0.04 | 0.47 ± 0.06 | 0.67 ± 0.07 |
| BA | 0.81 ± 0.04 | 0.87 ± 0.03 | 0.85 ± 0.04 | 0.87 ± 0.03 | 0.50 ± 0.07 | 0.79 ± 0.04 |
| Otsu | 0.47 ± 0.08 | 0.61 ± 0.05 | 0.57 ± 0.05 | 0.83 ± 0.03 | 0.52 ± 0.05 | 0.54 ± 0.09 |
| Wadden Sea | CP | 0.85 ± 0.04 | 0.88 ± 0.03 | 0.92 ± 0.01 | 0.93 ± 0.01 | 0.13 ± 0.03 | 0.93 ± 0.02 |
| BA | 0.87 ± 0.04 | 0.90 ± 0.04 | 0.93 ± 0.02 | 0.93 ± 0.01 | 0.44 ± 0.04 | 0.93 ± 0.03 |
| Otsu | 0.50 ± 0.05 | 0.69 ± 0.05 | 0.79 ± 0.05 | 0.84 ± 0.05 | 0.13 ± 0.04 | NA ± NA |
Table A6.
Mean and 95% confidence interval of the F1 score for the shallow water class over four single scene Sentinel-2 L2A images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
Table A6.
Mean and 95% confidence interval of the F1 score for the shallow water class over four single scene Sentinel-2 L2A images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
| Site | Threshold Type | B1B2 | B1B3 | B2B3 | Hue | Saturation | Value |
|---|
| Bahamas | CP | 0.96 ± 0.01 | 0.89 ± 0.02 | 0.80 ± 0.03 | 0.97 ± 0.01 | 0.88 ± 0.02 | 0.94 ± 0.03 |
| BA | 0.97 ± 0.01 | 0.90 ± 0.01 | 0.82 ± 0.02 | 0.98 ± 0.00 | 0.88 ± 0.01 | 0.95 ± 0.02 |
| Otsu | 0.96 ± 0.02 | 0.83 ± 0.04 | 0.65 ± 0.06 | 0.17 ± 0.02 | 0.70 ± 0.03 | 0.00 ± 0.00 |
| Caspian Sea | CP | 0.63 ± 0.09 | 0.84 ± 0.04 | 0.91 ± 0.03 | 0.90 ± 0.03 | 0.37 ± 0.06 | 0.65 ± 0.07 |
| BA | 0.60 ± 0.07 | 0.84 ± 0.04 | 0.91 ± 0.03 | 0.91 ± 0.02 | 0.19 ± 0.15 | 0.70 ± 0.07 |
| Otsu | 0.68 ± 0.06 | 0.72 ± 0.06 | 0.68 ± 0.06 | 0.01 ± 0.00 | 0.45 ± 0.06 | NA ± NA |
| Tanzania | CP | 0.80 ± 0.04 | 0.83 ± 0.05 | 0.80 ± 0.05 | 0.84 ± 0.05 | 0.47 ± 0.03 | 0.69 ± 0.06 |
| BA | 0.79 ± 0.05 | 0.85 ± 0.03 | 0.82 ± 0.05 | 0.85 ± 0.04 | 0.58 ± 0.10 | 0.75 ± 0.04 |
| Otsu | 0.62 ± 0.08 | 0.68 ± 0.06 | 0.66 ± 0.06 | 0.75 ± 0.03 | 0.58 ± 0.05 | 0.00 ± 0.00 |
| Wadden Sea | CP | 0.84 ± 0.04 | 0.88 ± 0.03 | 0.91 ± 0.02 | 0.92 ± 0.02 | 0.12 ± 0.05 | 0.92 ± 0.03 |
| BA | 0.87 ± 0.05 | 0.90 ± 0.04 | 0.93 ± 0.02 | 0.92 ± 0.02 | 0.30 ± 0.19 | 0.92 ± 0.04 |
| Otsu | 0.66 ± 0.05 | 0.76 ± 0.05 | 0.82 ± 0.05 | 0.86 ± 0.05 | 0.06 ± 0.03 | NA ± NA |
Table A7.
Mean and 95% confidence interval of the Matthews correlation coefficient (MCC) over four single scene Sentinel-2 L2A images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
Table A7.
Mean and 95% confidence interval of the Matthews correlation coefficient (MCC) over four single scene Sentinel-2 L2A images, six band indices and three threshold methods, to 2 decimal places. CP—Cross PAUA, BO—Best OA, Otsu—unsupervised Otsu’s threshold.
| Site | Threshold Type | B1B2 | B1B3 | B2B3 | Hue | Saturation | Value |
|---|
| Bahamas | CP | 0.93 ± 0.02 | 0.78 ± 0.03 | 0.61 ± 0.04 | 0.95 ± 0.01 | 0.76 ± 0.03 | 0.86 ± 0.06 |
| BA | 0.93 ± 0.01 | 0.81 ± 0.03 | 0.70 ± 0.03 | 0.95 ± 0.01 | 0.78 ± 0.03 | 0.90 ± 0.03 |
| Otsu | 0.92 ± 0.02 | 0.65 ± 0.06 | −0.16 ± 0.02 | 0.21 ± 0.02 | 0.60 ± 0.04 | 0.00 ± 0.00 |
| Caspian Sea | CP | 0.33 ± 0.13 | 0.70 ± 0.07 | 0.82 ± 0.05 | 0.81 ± 0.05 | −0.29 ± 0.12 | 0.34 ± 0.12 |
| BA | 0.25 ± 0.11 | 0.69 ± 0.06 | 0.82 ± 0.04 | 0.82 ± 0.04 | −0.09 ± 0.11 | 0.31 ± 0.12 |
| Otsu | 0.09 ± 0.08 | 0.26 ± 0.12 | 0.00 ± 0.00 | 0.05 ± 0.01 | −0.25 ± 0.12 | NA ± NA |
| Tanzania | CP | 0.64 ± 0.05 | 0.67 ± 0.08 | 0.61 ± 0.10 | 0.70 ± 0.08 | −0.05 ± 0.13 | 0.36 ± 0.13 |
| BA | 0.62 ± 0.06 | 0.72 ± 0.07 | 0.68 ± 0.08 | 0.73 ± 0.07 | 0.09 ± 0.16 | 0.59 ± 0.05 |
| Otsu | 0.06 ± 0.03 | 0.29 ± 0.11 | 0.19 ± 0.12 | 0.66 ± 0.03 | 0.03 ± 0.14 | 0.00 ± 0.00 |
| Wadden Sea | CP | 0.72 ± 0.06 | 0.78 ± 0.05 | 0.84 ± 0.02 | 0.85 ± 0.02 | −0.74 ± 0.06 | 0.86 ± 0.04 |
| BA | 0.75 ± 0.07 | 0.82 ± 0.07 | 0.86 ± 0.03 | 0.86 ± 0.03 | −0.01 ± 0.01 | 0.86 ± 0.05 |
| Otsu | 0.08 ± 0.03 | 0.49 ± 0.06 | 0.65 ± 0.08 | 0.72 ± 0.07 | -0.75 ± 0.06 | NA ± NA |
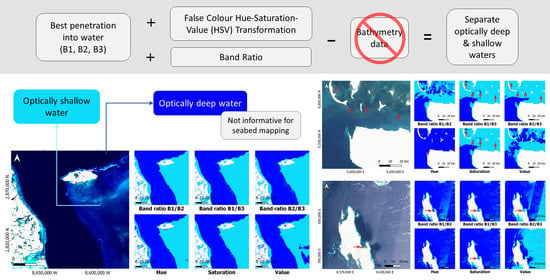
Figure A1.
S2 L2A Surface reflectance true colour RGB image of the Bahamas with the deep-water-masked images using the Best OA method of the different band indices. Dark blue denotes optically deep waters and light blue denotes optically shallow waters. The Sentinel-2 striping is slightly noticeable post-masking, in particular the B2/B3 and saturation bands.
Figure A1.
S2 L2A Surface reflectance true colour RGB image of the Bahamas with the deep-water-masked images using the Best OA method of the different band indices. Dark blue denotes optically deep waters and light blue denotes optically shallow waters. The Sentinel-2 striping is slightly noticeable post-masking, in particular the B2/B3 and saturation bands.
Figure A2.
S2 L2A Surface reflectance true colour RGB image of the Caspian Sea with the deep-water-masked images using the Cross PAUA method of the different band indices. Dark blue denotes optically deep waters and light blue denotes optically shallow waters. The red arrow points to the shallow areas that are easily omitted.
Figure A2.
S2 L2A Surface reflectance true colour RGB image of the Caspian Sea with the deep-water-masked images using the Cross PAUA method of the different band indices. Dark blue denotes optically deep waters and light blue denotes optically shallow waters. The red arrow points to the shallow areas that are easily omitted.
Figure A3.
S2 L2A Surface reflectance true colour RGB image of the Wadden Sea with deep-water-masked images using the Cross PAUA method of the different band indices. Dark blue denotes optically deep waters and light blue denotes optically shallow waters. Notice that the saturation-masked image is inverted and thus scored very badly in the accuracy metrics (Main text
Figure 8).
Figure A3.
S2 L2A Surface reflectance true colour RGB image of the Wadden Sea with deep-water-masked images using the Cross PAUA method of the different band indices. Dark blue denotes optically deep waters and light blue denotes optically shallow waters. Notice that the saturation-masked image is inverted and thus scored very badly in the accuracy metrics (Main text
Figure 8).
Figure A4.
S2 L2A Surface reflectance true colour RGB image of Tanzania with deep-water-masked images using the Best OA method of the different band indices. Dark blue denotes optically deep waters and light blue denotes optically shallow waters. The red arrow points to a challenging shallow area that is susceptible to omission. The B2/B3 band had the least omission in this region, at the cost of commissioning some sunglinted pixels in the east. The Sentinel-2 parallax effect striping is particularly apparent in this image.
Figure A4.
S2 L2A Surface reflectance true colour RGB image of Tanzania with deep-water-masked images using the Best OA method of the different band indices. Dark blue denotes optically deep waters and light blue denotes optically shallow waters. The red arrow points to a challenging shallow area that is susceptible to omission. The B2/B3 band had the least omission in this region, at the cost of commissioning some sunglinted pixels in the east. The Sentinel-2 parallax effect striping is particularly apparent in this image.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















