
The Improved Three-Step Semi-Empirical Radiometric Terrain Correction Approach for Supervised Classification of PolSAR Data



Abstract
:
1. Introduction
2. Methods
2.1. Data Format of PolSAR
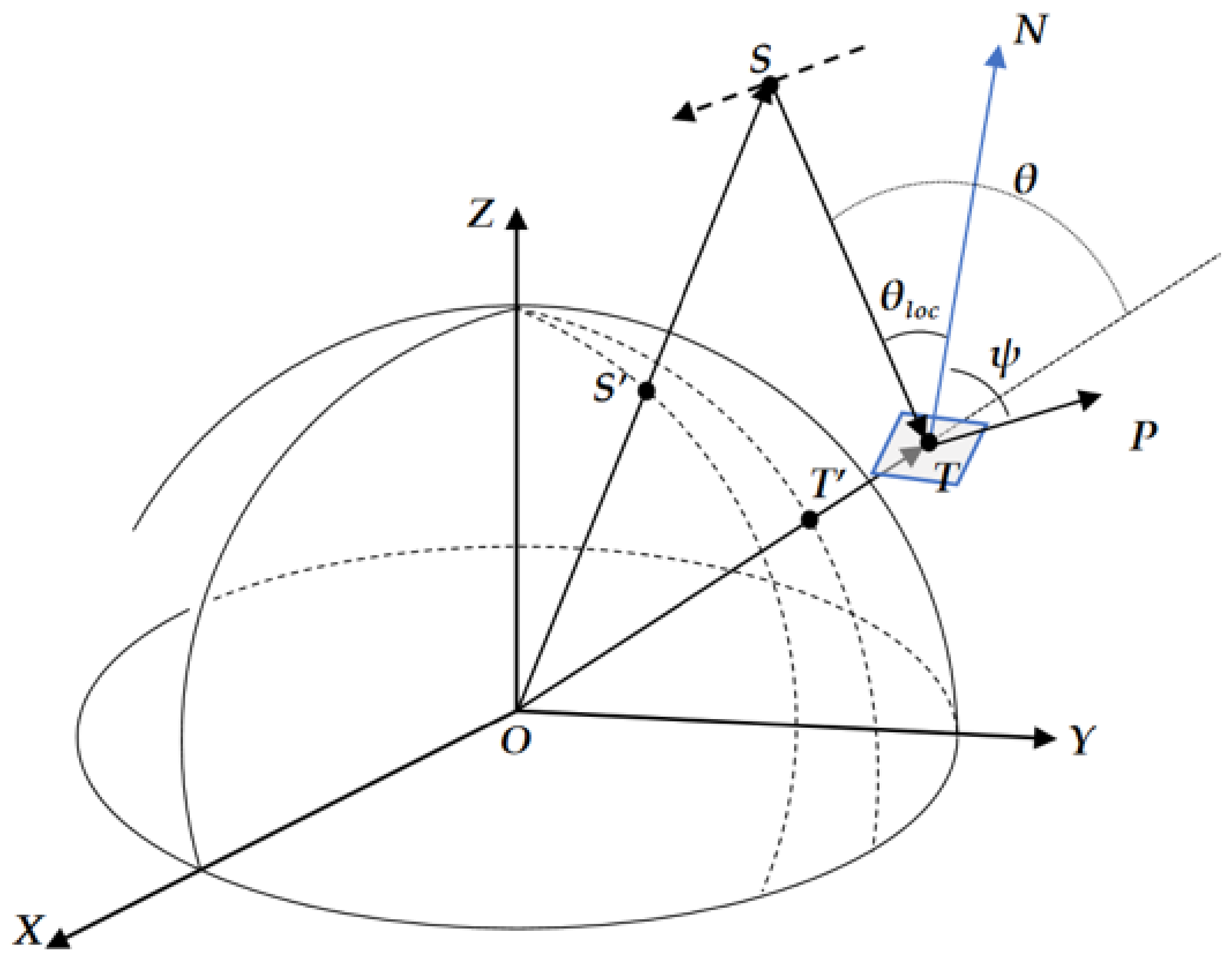
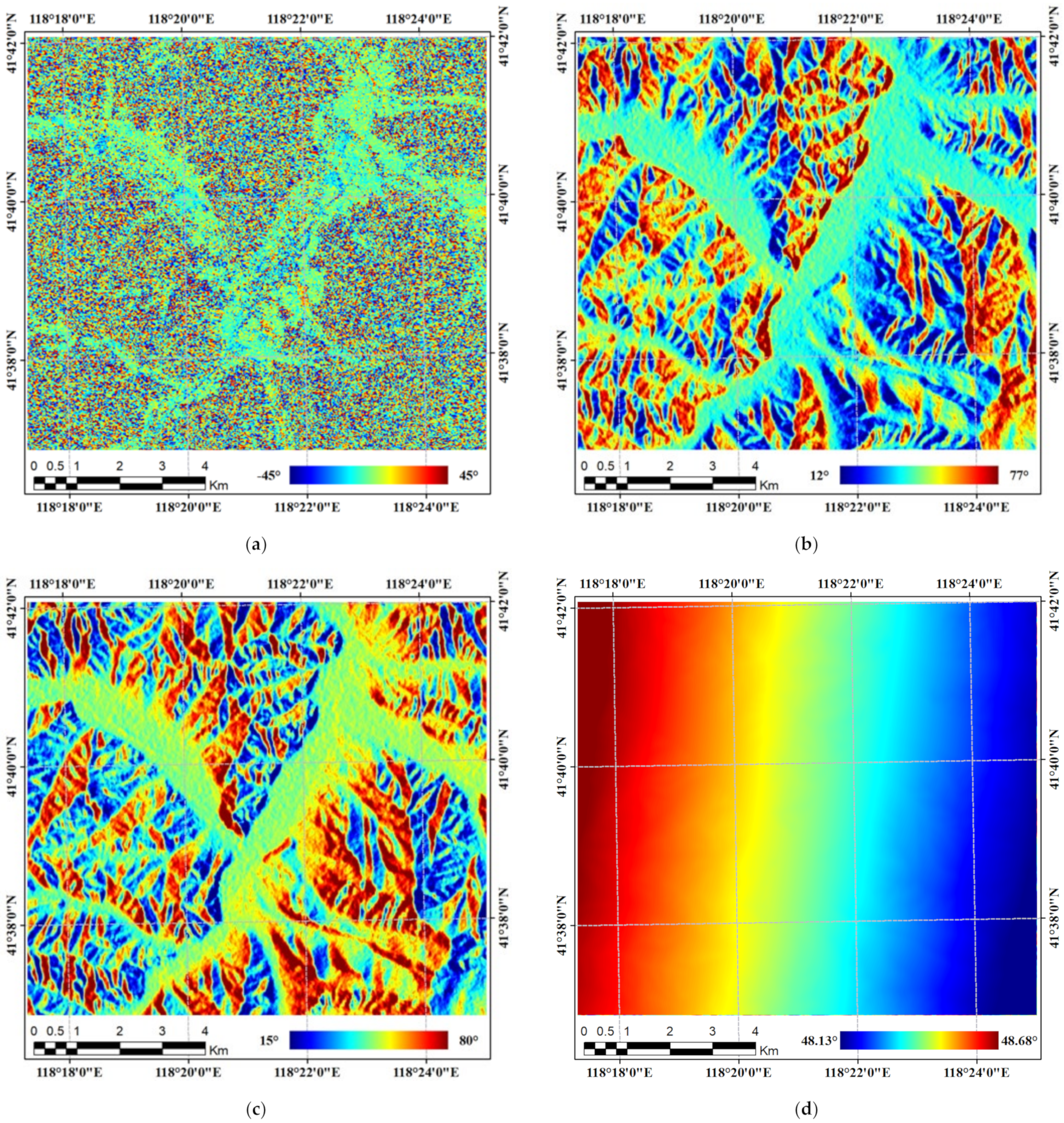
2.2. Local Geometry of SAR Imaging
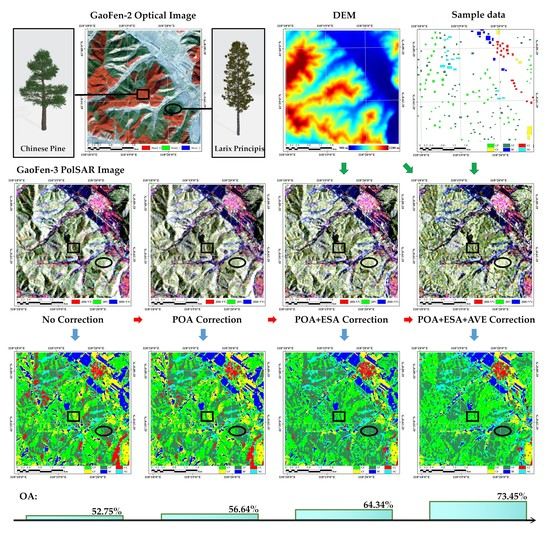
2.3. Three-Step Semi-Empirical RTC Approach for PolSAR Data
2.4. Improved AVE Correction for Supervised Classification of PolSAR
- (1)
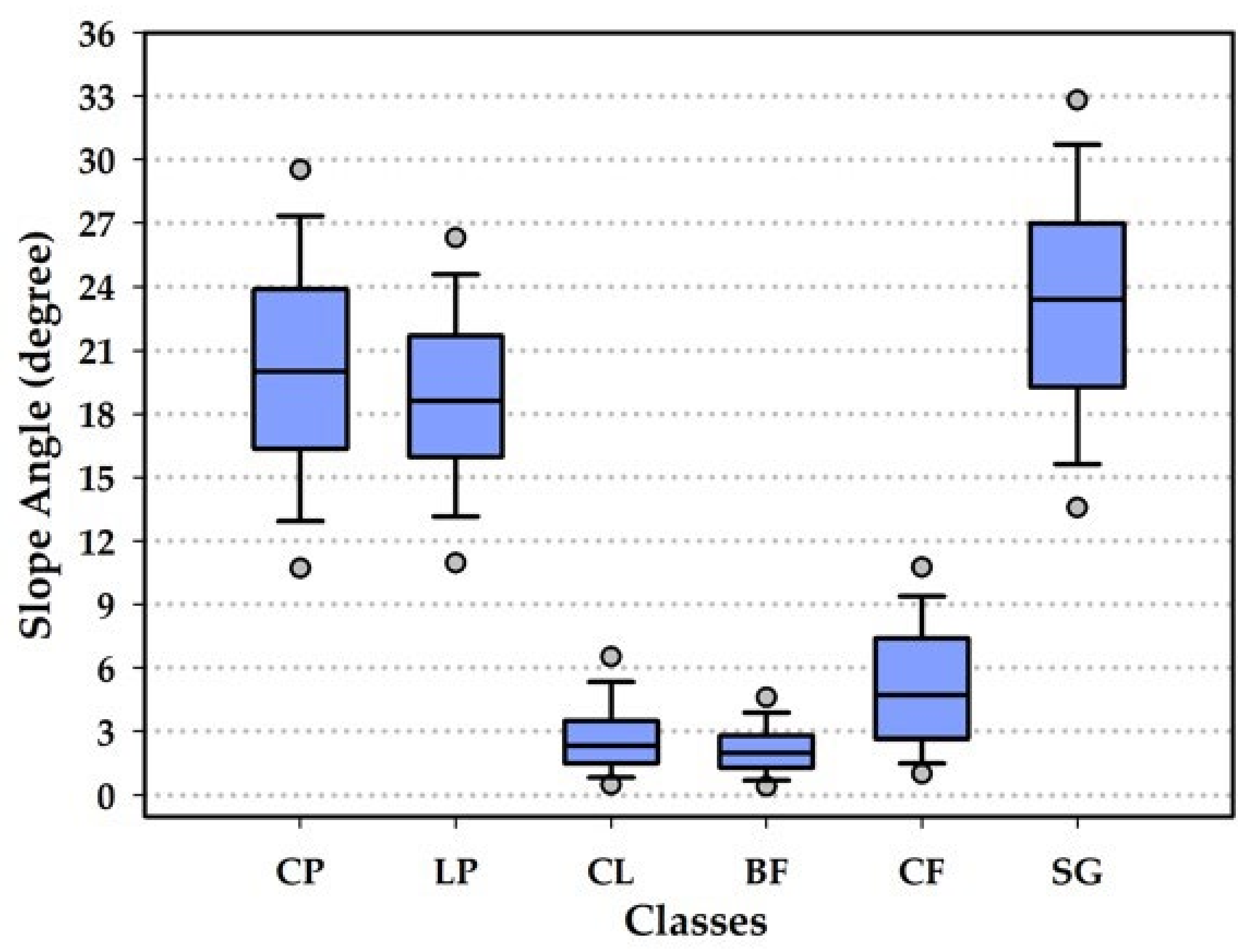
- The first is the steepness of the terrain where the samples are located, which can be analyzed based on the sample location and DEM data. The slope angle (u) can be calculated using Equation (12).
- (2)
- The second is the area ratio of different classes, and it should not be difficult to learn the rough ratio after preparing the sample data. Except for the types on flat terrain, the weight coefficient of remaining types can be set according to the area ratio of these types. In addition, if the area ratio of different classes cannot be obtained in the process of preparing sample data, we can consider setting the weight coefficients of different classes to the same value for AVE correction. Alternatively, rough area ratio information can also be obtained based on the classification results of PolSAR data after POA and ESA correction. It should be noted that the area ratio is the most important factor to consider, but the weight coefficient is not necessarily set strictly according to the area ratio. For some categories with a small proportion and strong heterogeneity, the value of n calculated by Equation (9) has a certain uncertainty, so the weight coefficient of these categories can be appropriately adjusted.
2.5. Supervised Classification and Evaluation
3. Test Site and Data
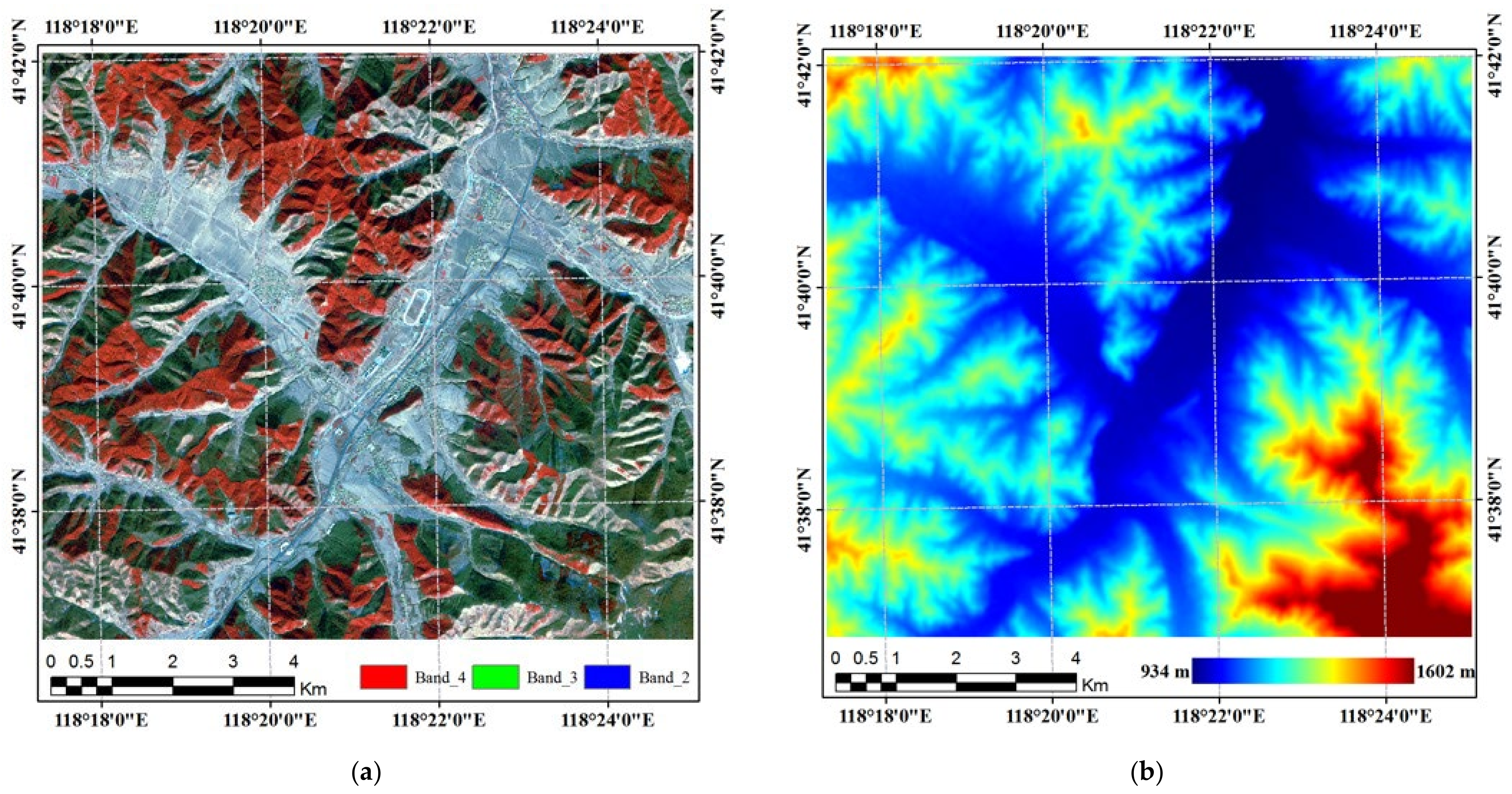
3.1. Test Site
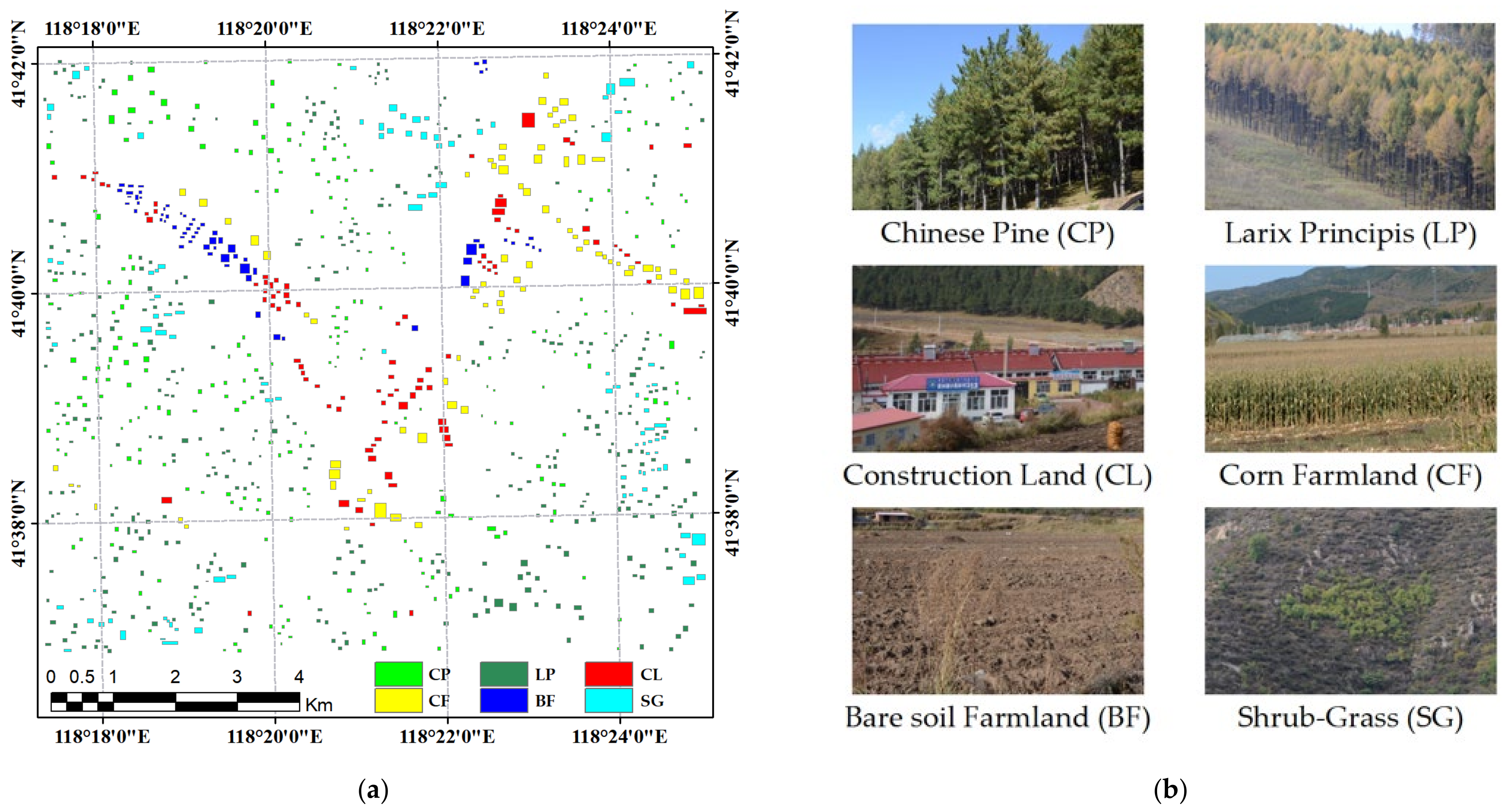
3.2. PolSAR and Reference Data
4. Results
4.1. Pre-Processing of PolSAR
4.2. Three-Step Semi-Empirical RTC
4.3. Supervised Classification of PolSAR
4.4. Sensitivity Analysis of Weight Matrix
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Löw, A.; Mauser, W. Generation of Geometrically and Radiometrically Terrain Corrected SAR Image Products. Remote Sens. Environ. 2007, 106, 337–349. [Google Scholar] [CrossRef]
- Zhao, L.; Chen, E.; Li, Z.; Li, L.; Gu, X. Three-stage terrain correction method for polarimetric SAR data. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 7549–7552. [Google Scholar] [CrossRef]
- Lee, J.S.; Schuler, D.L.; Ainsworth, T.L. Polarimetric SAR data compensation for terrain azimuth slope variation. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2153–2163. [Google Scholar]
- Small, D. Flattening gamma: Radiometric terrain correction for SAR imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3081–3093. [Google Scholar] [CrossRef]
- Castel, T.; Beaudoin, A.; Stach, N.; Stussi, N.; Le Toan, T.; Durand, P. Sensitivity of space-borne SAR data to forest parameters over sloping terrain. Theory and experiment. Int. J. Remote Sens. 2001, 22, 2351–2376. [Google Scholar] [CrossRef]
- Zhao, L.; Chen, E.; Li, Z.; Zhang, W.; Gu, X. Three-Step Semi-Empirical Radiometric Terrain Correction Approach for PolSAR Data Applied to Forested Areas. Remote Sens. 2017, 9, 269. [Google Scholar] [CrossRef] [Green Version]
- Villard, L.; Le Toan, T. Relating P-Band SAR Intensity to Biomass for Tropical Dense Forests in Hilly Terrain: γ0 or σ0? IEEE J. Sel. Top. Appl. 2015, 8, 214–223. [Google Scholar] [CrossRef]
- Wang, P.; Ma, Q.; Wang, J.; Hong, W.; Li, Y.; Chen, Z. An improved SAR radiometric terrain correction method and its application in polarimetric SAR terrain effect reduction. Prog. Electromagn. Res. B 2013, 54, 107–128. [Google Scholar] [CrossRef] [Green Version]
- Chen, E.; Li, Z.; Tian, X.; Ling, F. Terrain radiometric correction model and its validation for space-borne SAR data. Geo-Environ. Inf. Sci. Wuhan Univ. 2010, 35, 322–326. [Google Scholar]
- Freeman, A.; Curlander, J.C. Radiometric correction and calibration of SAR images. Photogramm. Eng. Remote. Sens. 1989, 55, 1295–1301. [Google Scholar]
- Van, Z.J.J. The effects of topography on the radar scattering from vegetated areas. IEEE Trans. Geosci. Remote Sens. 1993, 31, 153–160. [Google Scholar]
- Ulander, L.M.H. Radiometric slope correction of synthetic-aperture radar images. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1115–1122. [Google Scholar] [CrossRef]
- Frey, O.; Santoro, M.; Werner, C.L.; Wegmuller, U. DEM-based SAR pixel-area estimation for enhanced geocoding refinement and radiometric normalization. IEEE Geosci. Remote Sens. 2013, 10, 48–52. [Google Scholar] [CrossRef]
- Marc, S.; Bryan, V.R.; Michael, D.; Scott, H. Radiometric correction of airborne radar images over forested terrain with topography. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4488–4500. [Google Scholar]
- Hoekman, D.H.; Reiche, J. Multi-model radiometric slope correction of SAR images of complex terrain using a two-stage semi-empirical approach. Remote Sens. Environ. 2015, 156, 1–10. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Volume Scattering and Emission Theory. In Microwave Remote Sensing Active and Passiv; Artech House: Norwood, MA, USA, 1986; Volume 3, pp. 1064–1203. [Google Scholar]
- Zhang, H.; Zhu, J.; Wang, C.; Lin, H.; Long, J.; Zhao, L.; Fu, H.; Liu, Z. Forest Growing Stock Volume Estimation in Subtropical Mountain Areas Using PALSAR-2 L-Band PolSAR Data. Forests 2019, 10, 276. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; Grunes, M.R.; Kwok, R. Classification of multi-look polarimetric SAR imagery based on complex Wishart distribution. Int. J. Remote Sens. 1994, 15, 2299–2311. [Google Scholar] [CrossRef]
- Feng, Q.; Zhou, L.; Chen, E.; Liang, X.; Zhao, L.; Zhou, Y. The Performance of Airborne C-Band PolInSAR Data on Forest Growth Stage Types Classification. Remote Sens. 2017, 9, 955. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Zhang, H.; Li, Y.; Yang, T.; Peng, W.; Li, S. Diversity Model and Growth Simulation of Tree. J. Geo-Inf. Sci. 2018, 20, 1422–1531. [Google Scholar] [CrossRef]
- Processing of GF-3 Data Using PolSARpro. Available online: https://mp.weixin.qq.com/s/zQH3lWOCUyuXSwwQ5_wWBA (accessed on 7 December 2021).
- Geocoding of GF-3 Data Using GAMMA. Available online: https://mp.weixin.qq.com/s/-0VpLbxfeZGNM6H_WcQc8Q (accessed on 7 December 2021).
- Atwood, D.K.; Small, D.; Gens, R. Improving PolSAR Land Cover Classification with Radiometric Correction of the Coherency Matrix. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 848–856. [Google Scholar] [CrossRef]
- Shang, F.; Saito, T.; Ohi, S.; Kishi, N. Coniferous and Broad-Leaved Forest Distinguishing Using L-Band Polarimetric SAR Data. IEEE Geosci. Remote Sens. 2020, 59, 7487–7499. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CP | LP | CL | BF | CF | SG | UA (%) | |
|---|---|---|---|---|---|---|---|
| CP | 1130 | 2324 | 653 | 120 | 189 | 909 | 21.22 |
| LP | 861 | 2194 | 653 | 1 | 45 | 290 | 54.25 |
| CL | 275 | 652 | 1410 | 1 | 20 | 306 | 52.93 |
| BF | 958 | 42 | 5 | 1543 | 94 | 331 | 51.90 |
| CF | 659 | 116 | 118 | 50 | 3732 | 122 | 77.80 |
| SG | 66 | 203 | 386 | 1 | 22 | 1684 | 71.30 |
| PA(%) | 28.61 | 39.67 | 43.72 | 89.92 | 90.98 | 46.24 |
| CP | LP | CL | BF | CF | SG | UA (%) | |
|---|---|---|---|---|---|---|---|
| CP | 1076 | 2323 | 684 | 121 | 232 | 842 | 20.39 |
| LP | 990 | 2436 | 580 | 1 | 52 | 315 | 55.69 |
| CL | 148 | 366 | 1435 | 1 | 21 | 239 | 64.93 |
| BF | 942 | 38 | 6 | 1541 | 99 | 326 | 52.20 |
| CF | 722 | 156 | 112 | 51 | 3673 | 192 | 74.87 |
| SG | 71 | 212 | 408 | 1 | 25 | 1728 | 70.67 |
| PA(%) | 27.25 | 44.04 | 44.50 | 89.80 | 89.54 | 47.45 |
| CP | LP | CL | BF | CF | SG | UA (%) | |
|---|---|---|---|---|---|---|---|
| CP | 2007 | 1300 | 250 | 147 | 268 | 823 | 41.86 |
| LP | 1070 | 3677 | 872 | 2 | 114 | 602 | 58.02 |
| CL | 13 | 158 | 1727 | 1 | 24 | 129 | 84.16 |
| BF | 609 | 16 | 6 | 1517 | 61 | 342 | 59.47 |
| CF | 140 | 1 | 93 | 18 | 3593 | 8 | 93.25 |
| SG | 110 | 379 | 277 | 29 | 42 | 1738 | 67.50 |
| PA(%) | 50.82 | 66.48 | 53.55 | 88.51 | 87.59 | 47.72 |
| CP | LP | CL | BF | CF | SG | UA (%) | |
|---|---|---|---|---|---|---|---|
| CP | 2940 | 651 | 314 | 55 | 268 | 621 | 60.63 |
| LP | 670 | 4521 | 907 | 1 | 81 | 652 | 66.17 |
| CL | 2 | 41 | 1684 | 1 | 22 | 48 | 93.66 |
| BF | 37 | 1 | 6 | 1525 | 36 | 320 | 79.22 |
| CF | 142 | 3 | 107 | 19 | 3638 | 29 | 92.38 |
| SG | 158 | 315 | 207 | 114 | 57 | 1972 | 69.85 |
| PA(%) | 74.45 | 81.72 | 52.22 | 88.92 | 88.69 | 54.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Chen, E.; Li, Z.; Fan, Y.; Xu, K. The Improved Three-Step Semi-Empirical Radiometric Terrain Correction Approach for Supervised Classification of PolSAR Data. Remote Sens. 2022, 14, 595. https://doi.org/10.3390/rs14030595
Zhao L, Chen E, Li Z, Fan Y, Xu K. The Improved Three-Step Semi-Empirical Radiometric Terrain Correction Approach for Supervised Classification of PolSAR Data. Remote Sensing. 2022; 14(3):595. https://doi.org/10.3390/rs14030595
Chicago/Turabian StyleZhao, Lei, Erxue Chen, Zengyuan Li, Yaxiong Fan, and Kunpeng Xu. 2022. "The Improved Three-Step Semi-Empirical Radiometric Terrain Correction Approach for Supervised Classification of PolSAR Data" Remote Sensing 14, no. 3: 595. https://doi.org/10.3390/rs14030595
APA StyleZhao, L., Chen, E., Li, Z., Fan, Y., & Xu, K. (2022). The Improved Three-Step Semi-Empirical Radiometric Terrain Correction Approach for Supervised Classification of PolSAR Data. Remote Sensing, 14(3), 595. https://doi.org/10.3390/rs14030595