
Shield Tunnel Convergence Diameter Detection Based on Self-Driven Mobile Laser Scanning

 ,
, 
 ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Work on Ellipse Fitting Method
1.2. Problem Formulation of Local Curve Fitting Fitting Method
2. Methods
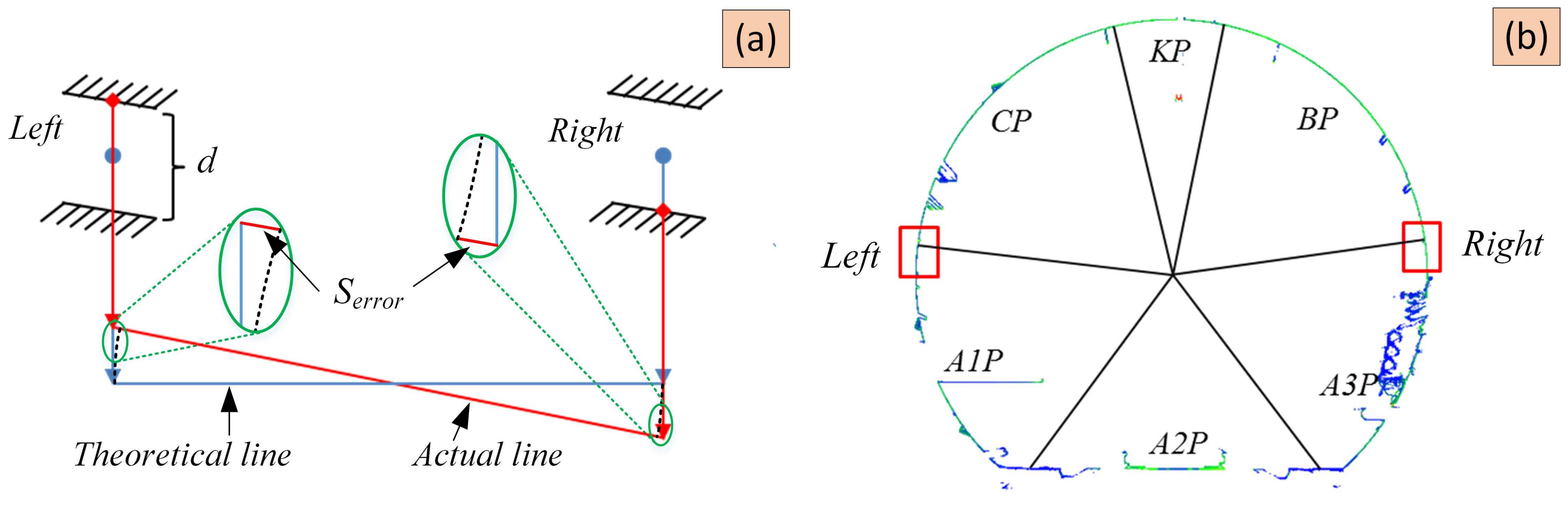
2.1. System Integration and Measurement Error Analysis
- (1)
- Helix error
- (2)
- Transverse seam error
2.2. Point Cloud Mapping
2.2.1. Data Dimension Reduction
2.2.2. Feature Enhancement
2.3. Seam Detection
2.4. Iterative Optimal Ellipse Fitting
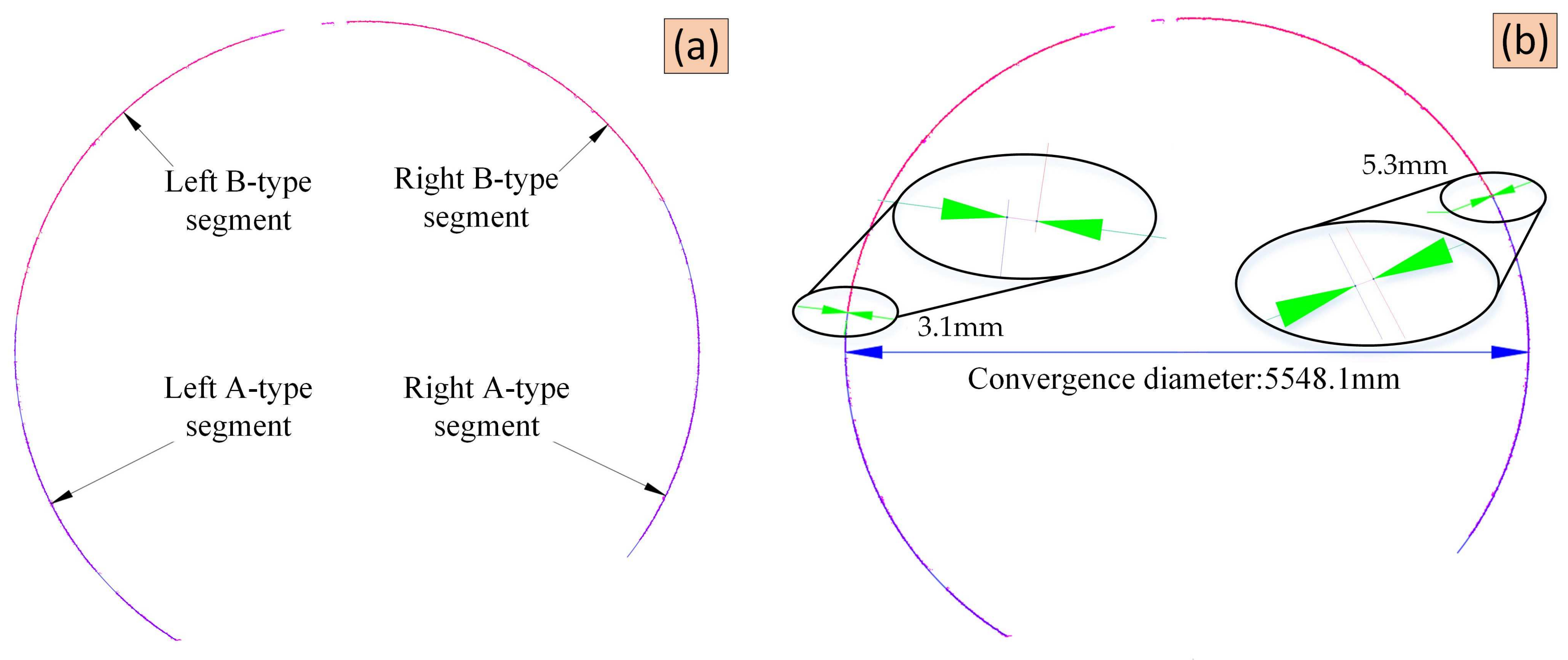
2.5. Block Fitting Detection
- (1)
- Noise filtering by model iterative registration
- (2)
- Circle fitting segment point cloud
- (3)
- Calculation of convergence diameter and radial dislocation
3. Results and Analysis
3.1. Study Area and SDMLS Data Generation
3.2. Results
3.2.1. Result of Ring and Transverse Seams Detection
3.2.2. Result of Convergence Diameter Points Inspection
- (1)
- Continuous Seam Points
- (2)
- Stagger seam points
3.3. Accuracy Assessment
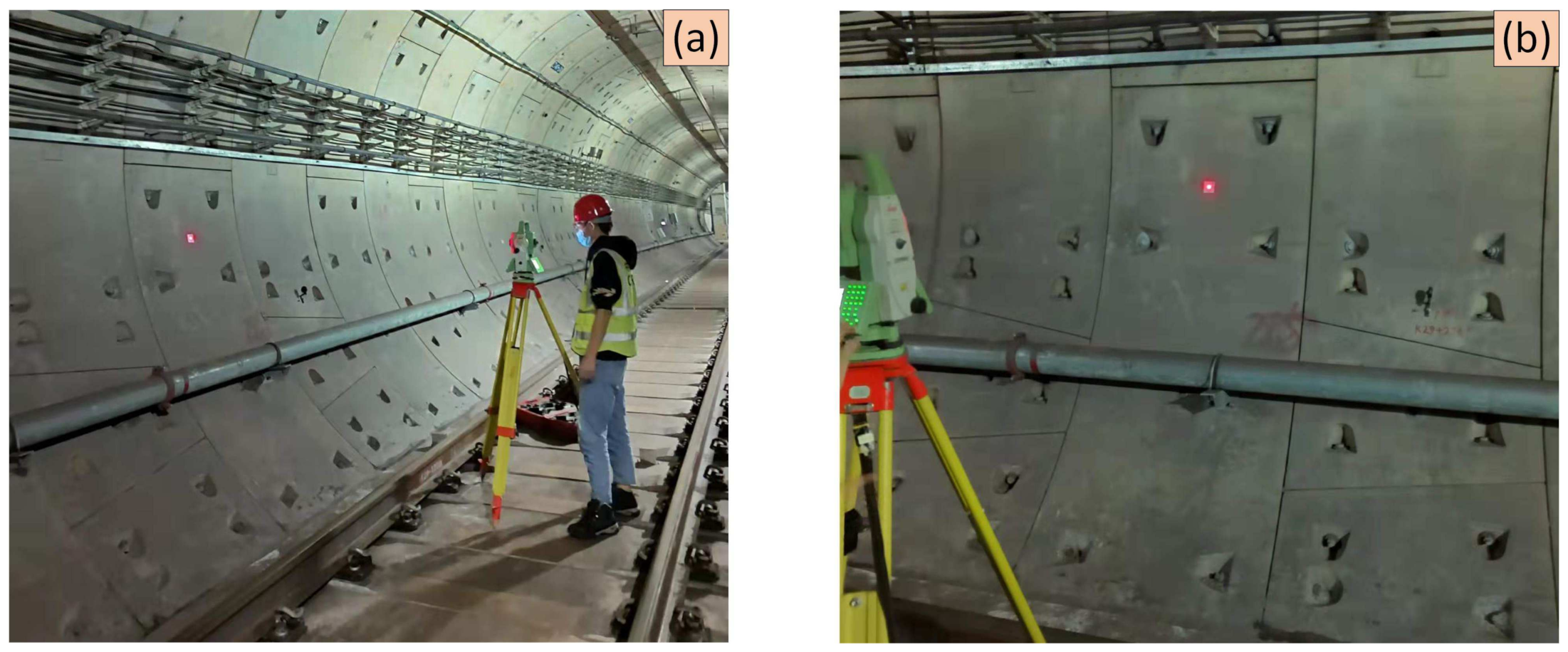
3.3.1. Absolute Accuracy Verification Based on the Total Station
3.3.2. Repeat Accuracy Verification for Round-trip Repeat Scan
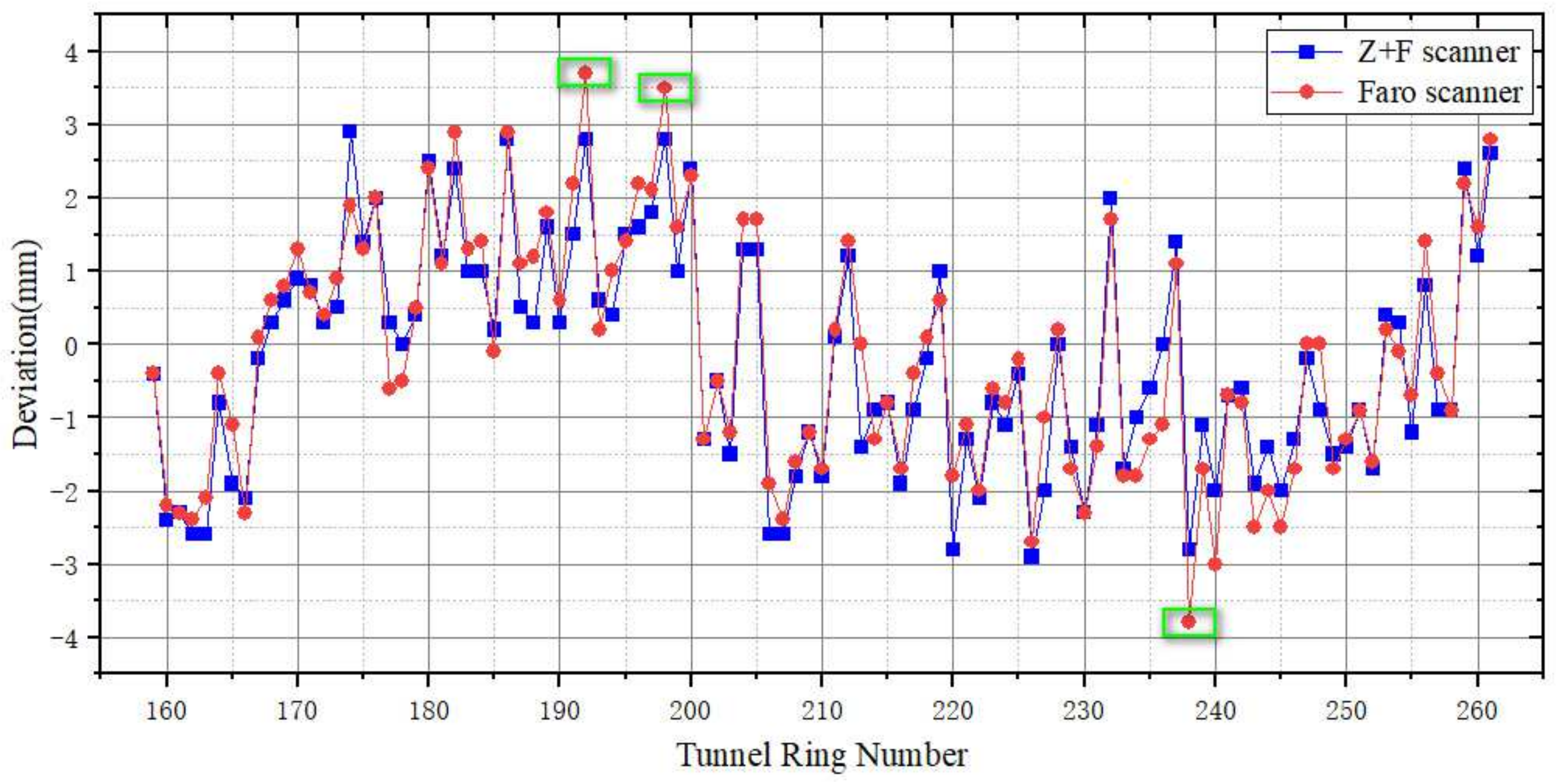
3.4. Accuracy Comparison of Different Scanners
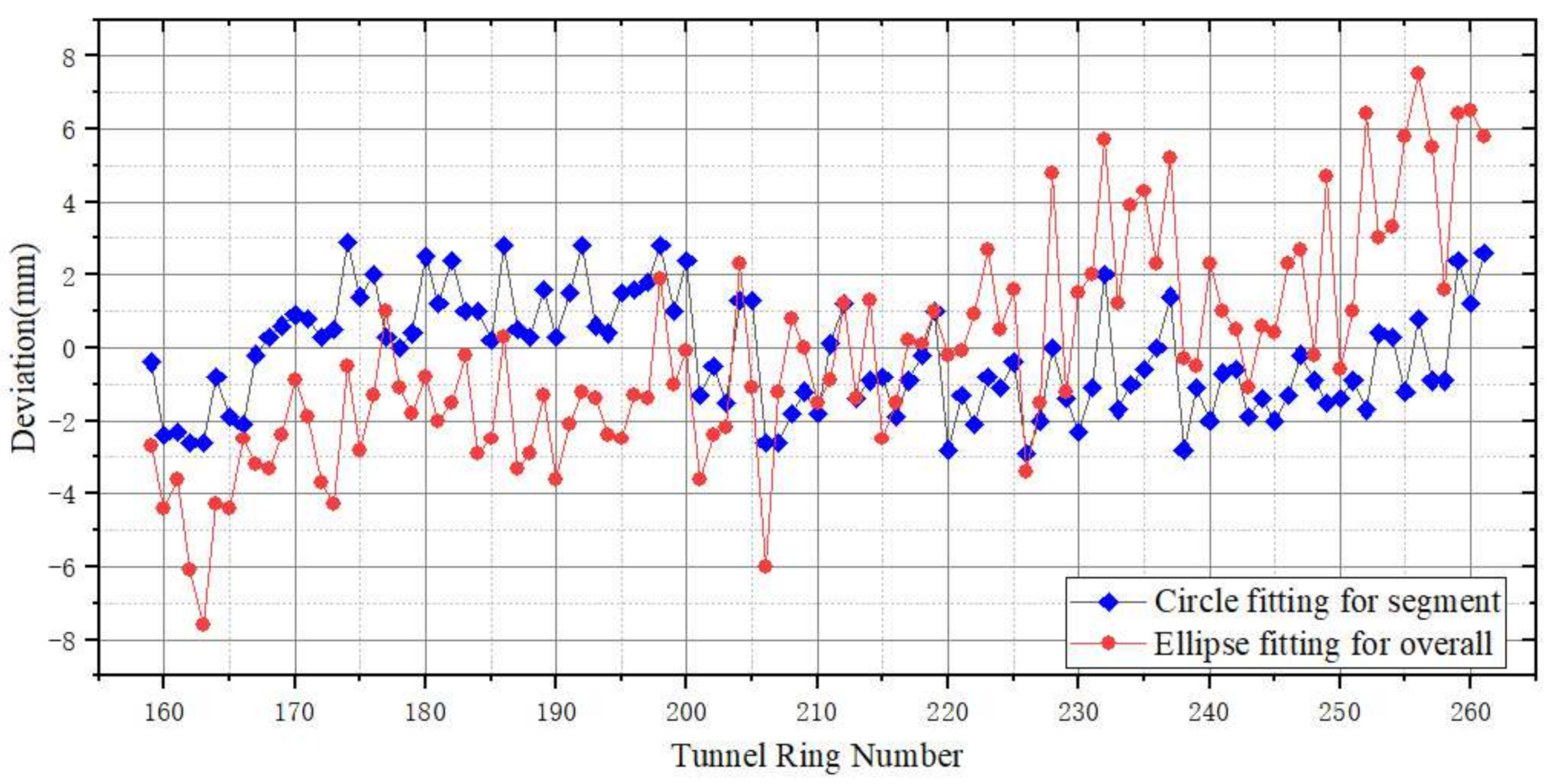
3.5. Comparison of Ellipse Fitting and Block Fitting Results
4. Discussion and Future Works
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- The Statistic and Analysis Report of Urban Rail Transit. 2020. Available online: https://www.camet.org.cn/tjxx/7647 (accessed on 9 April 2021).
- Li, Y.J.; Xu, H.; Zhang, Y.; Yao, J.J. Application of Carbon Fiber Cloth in Reinforcement of Metro Tunnel Disease. Appl. Mech. Mater. 2013, 353–356, 1525–1528. [Google Scholar] [CrossRef]
- Mukupa, W.; Roberts, G.W.; Hancock, C.M.; Al-Manasir, K. A review of the use of terrestrial laser scanning application for change detection and deformation monitoring of structures. Surv. Rev. 2016, 49, 116–199. [Google Scholar] [CrossRef]
- Feng, L.; Yi, X.; Zhu, D.; Xie, X.; Wang, Y. Damage detection of metro tunnel structure through transmissibility function and cross correlation analysis using local excitation and measurement. Mech. Syst. Signal Process. 2015, 60, 59–74. [Google Scholar] [CrossRef]
- Stiros, S.C.; Kontogianni, V. Mean deformation tensor and mean deformation ellipse of an excavated tunnel section. Int. J. Rock Mech. Min. Sci. 2009, 46, 1306–1314. [Google Scholar] [CrossRef]
- Xu, J.; Ding, L.; Luo, H.; Chen, E.J.; Wei, L. Near real-time circular tunnel shield segment assembly quality inspection using point cloud data: A case study. Tunn. Undergr. Space Technol. 2019, 91, 102998. [Google Scholar] [CrossRef]
- Du, L.; Zhong, R.; Sun, H.; Zhu, Q.; Zhang, Z. Study of the Integration of the CNU-TS-1 Mobile Tunnel Monitoring System. Sensors 2018, 18, 420. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ao, X.; Wu, H.; Xu, Z.; Gao, Z. Damage Extraction of Metro Tunnel Surface from Roughness Map Generated by Point Cloud. In Proceedings of the 2018 26th International Conference on Geoinformatics, Kunming, China, 28–30 June 2018; pp. 1–4. [Google Scholar]
- Yang, B.; Fang, L. Automated Extraction of 3-D Railway Tracks from Mobile Laser Scanning Point Clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4750–4761. [Google Scholar] [CrossRef]
- Stal, C.; De Wulf, A.; Nuttens, T. Tunnel measurements and point filtering: Automated point set filtering of cylindrical tunnel point sets. Gim Int. 2012, 26, 30–35. [Google Scholar]
- Wang, W.; Zhao, W.; Huang, L.; Vimarlund, V.; Wang, Z. Applications of terrestrial laser scanning for tunnels: A review. J. Traffic Transp. Eng. 2014, 1, 325–337. [Google Scholar] [CrossRef] [Green Version]
- Yan, L.; Liu, H.; Tan, J.; Li, Z.; Xie, H.; Chen, C. Scan Line Based Road Marking Extraction from Mobile LiDAR Point Cloud. Sensors 2016, 16, 903. [Google Scholar] [CrossRef]
- Huang, H.-W.; Cheng, W.-C.; Zhou, M.; Chen, J.; Zhao, S. Towards Automated 3D Inspection of Water Leakages in Shield Tunnel Linings Using Mobile Laser Scanning Data. Sensors 2020, 20, 6669. [Google Scholar] [CrossRef] [PubMed]
- Tan, K.; Cheng, X.; Ju, Q. Combining mobile terrestrial laser scanning geometric and radiometric data to eliminate accessories in circular metro tunnels. J. Appl. Remote Sens. 2016, 10, 030503. [Google Scholar] [CrossRef]
- Yue, Z.; Sun, H.; Zhong, R.; Du, L. Method for Tunnel Displacements Calculation Based on Mobile Tunnel Monitoring System. Sensors 2021, 21, 4407. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Xia, J. Research on convergence analysis method of metro tunnel section--Based on mobile 3D laser scanning technology. IOP Conf. Ser. Earth Environ. Sci. 2021, 669, 012008. [Google Scholar] [CrossRef]
- Cui, H.; Ren, X.; Mao, Q.; Hu, Q.; Wang, W. Shield subway tunnel deformation detection based on mobile laser scanning. Autom. Constr. 2019, 106, 102889. [Google Scholar] [CrossRef]
- Du, L.; Ruofei, Z.; Sun, H.; Wu, Q. Automatic monitoring of tunnel deformation based on high density point clouds data. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 353–360. [Google Scholar] [CrossRef] [Green Version]
- Walton, G.; Delaloye, D.; Diederichs, M.S. Development of an elliptical fitting algorithm to improve change detection capabilities with applications for deformation monitoring in circular tunnels and shafts. Tunn. Undergr. Space Technol. 2014, 43, 336–349. [Google Scholar] [CrossRef]
- Delaloye, D.; Diederichs, M.S.; Walton, G.; Hutchinson, J. Sensitivity Testing of the Newly Developed Elliptical Fitting Method for the Measurement of Convergence in Tunnels and Shafts. Rock Mech. Rock Eng. 2014, 48, 651–667. [Google Scholar] [CrossRef]
- Cao, Z.; Chen, D.; Peethambaran, J.; Zhang, Z.; Xia, S.; Zhang, L. Tunnel Reconstruction With Block Level Precision by Combining Data-Driven Segmentation and Model-Driven Assembly. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8853–8872. [Google Scholar] [CrossRef]
- Sun, H.; Xu, Z.; Yao, L.; Zhong, R.; Du, L.; Wu, H. Tunnel Monitoring and Measuring System Using Mobile Laser Scanning: Design and Deployment. Remote. Sens. 2020, 12, 730. [Google Scholar] [CrossRef] [Green Version]
- Yu, A.; Mei, W.; Han, M. Deep learning based method of longitudinal dislocation detection for metro shield tunnel segment. Tunn. Undergr. Space Technol. 2021, 113, 103949. [Google Scholar] [CrossRef]
- Kang, Z.; Zhang, L.; Tuo, L.; Wang, B.; Chen, J. Continuous Extraction of Subway Tunnel Cross Sections Based on Terrestrial Point Clouds. Remote. Sens. 2014, 6, 857–879. [Google Scholar] [CrossRef] [Green Version]
- Dhal, K.G.; Das, A.; Ray, S.; Gálvez, J.; Das, S. Histogram Equalization Variants as Optimization Problems: A Review. Arch. Comput. Methods Eng. 2020, 28, 1471–1496. [Google Scholar] [CrossRef]
- Iqbal, B.; Iqbal, W.; Khan, N.; Mahmood, A.; Erradi, A. Canny edge detection and Hough transform for high resolution video streams using Hadoop and Spark. Clust. Comput. 2019, 23, 397–408. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Pham, X.D.; Jeon, J.W. An improvement of the Standard Hough Transform to detect line segments. In Proceedings of the 2008 IEEE International Conference on Industrial Technology, Chengdu, China, 21–24 April 2008; pp. 1–6. [Google Scholar]
- Fujimoto, T.; Kawasaki, T.; Kitamura, K. Canny-Edge-Detection/Rankine-Hugoniot-conditions unified shock sensor for inviscid and viscous flows. J. Comput. Phys. 2019, 396, 264–279. [Google Scholar] [CrossRef]
- Cheng, Y.-J.; Qiu, W.; Lei, J. Automatic Extraction of Tunnel Lining Cross-Sections from Terrestrial Laser Scanning Point Clouds. Sensors 2016, 16, 1648. [Google Scholar] [CrossRef]
- Jia, D.; Zhang, W.; Liu, Y. Systematic Approach for Tunnel Deformation Monitoring with Terrestrial Laser Scanning. Remote Sens. 2021, 13, 3519. [Google Scholar] [CrossRef]
- Xu, X.; Yang, H.; Neumann, I. A feature extraction method for deformation analysis of large-scale composite structures based on TLS measurement. Compos. Struct. 2018, 184, 591–596. [Google Scholar] [CrossRef]
- Momen, A.; Johnson, B.K.; Chakhchoukh, Y. Parameters Estimation for Short Line Using the Least Trimmed Squares (LTS). In Proceedings of the 2019 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–21 February 2019; pp. 1–4. [Google Scholar]
- Alshqaq, S.S. On the least trimmed squares estimators for JS circular regression model. Kuwait J. Sci. 2021, 48, 1–13. [Google Scholar] [CrossRef]
- Ray, A.; Srivastava, D.C. Non-linear least squares ellipse fitting using the genetic algorithm with applications to strain analysis. J. Struct. Geol. 2008, 30, 1593–1602. [Google Scholar] [CrossRef]
- Borowski, L.; Banb, M. The Best Robust Estimation Method to Determine Local Surface. Balt. J. Mod. Comput. 2019, 7, 525–540. [Google Scholar] [CrossRef]
- Tan, Z.; Li, Z.; Tang, W.; Chen, X.-Y.; Duan, J. Research on Stress Characteristics of Segment Structure during the Construction of the Large-Diameter Shield Tunnel and Cross-Passage. Symmetry 2020, 12, 1246. [Google Scholar] [CrossRef]
- Dong, F.; Huang, J.; Li, A.; Gao, C. Analysis on Disease State of Urban Operational Subway Tunnels. Environ. Eng. 2021, 6, 54–62. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Gong, J.; Na, J.; Yang, Y.; Tan, Z.; Pfeifer, N.; Zheng, S. Shield Tunnel Convergence Diameter Detection Based on Self-Driven Mobile Laser Scanning. Remote Sens. 2022, 14, 767. https://doi.org/10.3390/rs14030767
Xu L, Gong J, Na J, Yang Y, Tan Z, Pfeifer N, Zheng S. Shield Tunnel Convergence Diameter Detection Based on Self-Driven Mobile Laser Scanning. Remote Sensing. 2022; 14(3):767. https://doi.org/10.3390/rs14030767
Chicago/Turabian StyleXu, Lei, Jian Gong, Jiaming Na, Yuanwei Yang, Zhao Tan, Norbert Pfeifer, and Shunyi Zheng. 2022. "Shield Tunnel Convergence Diameter Detection Based on Self-Driven Mobile Laser Scanning" Remote Sensing 14, no. 3: 767. https://doi.org/10.3390/rs14030767
APA StyleXu, L., Gong, J., Na, J., Yang, Y., Tan, Z., Pfeifer, N., & Zheng, S. (2022). Shield Tunnel Convergence Diameter Detection Based on Self-Driven Mobile Laser Scanning. Remote Sensing, 14(3), 767. https://doi.org/10.3390/rs14030767