1. Introduction
Unmanned aerial vehicles (UAVs) have recently been investigated and proven useful for several forestry applications such as mapping and monitoring of trees and forests [
1], measuring forest canopy gaps [
2,
3] and tree structural attributes [
4,
5,
6], tree species classification [
7,
8], estimating biodiversity and conservation value [
3,
9] and monitoring regenerating forest stands [
10,
11,
12]. UAVs provide an advantage for collecting timely and spatially explicit data with multiple spectral bands, which has filled a gap between terrestrial and airborne (aircraft) or satellite measurements. UAVs can also remain operational for monitoring abrupt changes such as forest fires [
13,
14], even in cloudy conditions when timely aerial or satellite data is unavailable.
Bark beetles and other pest insects are causing widespread tree mortality in several continents around the World [
15,
16]. In Europe, the European spruce bark beetle (
Ips typographus L.) is causing the most severe damage and is jeopardizing economical, ecological and societal ecosystem services of Norway spruce (
Picea abies H. Karst.) forests all around Europe [
17,
18]. In addition to losing the ecosystem services forests provide, dead trees can pose a severe hazard in urban areas when the roots and lower parts of the trunk of dead trees begin to rot, they can easily fall. Increasing mean temperatures combined with more severe storm damage and droughts have enabled optimal reproduction conditions that have led to large numbers of bark beetles [
19,
20]. Forest managers have been unable to respond to the mass outbreaks of the bark beetle. Hence, there is an urgent need for novel monitoring tools that can detect forest and tree decline that is caused by bark beetles, especially in the early stages of infestation and enable development of efficient tools for the management of bark beetle damage.
Remote sensing can be used to estimate tree condition remotely by using spectral data. The spectral reflectance characteristics of tree canopies change when trees are stressed or damaged and that information can be used to separate healthy and declined trees. For example, a bark beetle infestation leads to discoloration and defoliation of tree crowns [
21]. UAVs are viable for acquiring timely and spatially precise data for monitoring forest health conditions [
22,
23]. One of the first studies to utilize UAVs for monitoring insect pests was conducted in Germany by Lehmann et al. [
24]. They used multispectral imagery to detect an infestation by the oak splendor beetle (
Agrilus biguttatus Fab.) in oak stands (
Quercus sp.). They achieved an overall kappa index of 0.77–0.81 within five classes: three health classes in oak stands (infested, healthy and dead branches), canopy gaps and other vegetation. Infestation of the European spruce bark beetle (
Ips typographus L.) was studied using UAVs in the work of Näsi et al. [
25]. They used UAV-based hyperspectral imagery and a k-nearest neighbor classifier for identifying different infestation stages of spruces in Southern Finland. They concluded that higher spatial accuracy (GSD: 10 cm) captured from a UAV provided better classification results than the lower GSD of 50 cm captured from aircraft when spruces were classified to three health classes.
Recently, UAVs have been used to monitor bark beetle infestations especially in the Czech Republic where millions of cubic meters of trees have been infested due to bark beetles causing significant economic losses [
26,
27,
28,
29,
30]. Klouček et al. [
27] used a low-cost UAV-based system with RGB and modified CIR cameras to capture multispectral time series of a bark beetle (
I. typographus) outbreak area in the northern part of the Czech Republic. The results indicated that the system was capable of providing information of various stages of bark beetle infestation across seasons; the classification accuracy was the highest after the active life stages of the bark beetle in October and lowest in the beginning of the invasion in mid-June. Brovkina et al. [
30] studied the potential of UAV-based RGB and normalized difference vegetation index (NDVI) data to monitor health conditions of Norway spruces. They found that NDVI values differ statistically between spruces with mechanical damage and resin exudation from healthy spruces (
p < 0.05). In addition, Minarik et al. [
29] developed an automatic method to extract tree crowns from multispectral imagery for bark beetle infestation detection.
Cessna et al. [
31] compared performance of UAV-based multispectral approach and aircraft-based hyperspectral imaging LiDAR data (G-LiHT system) in mapping a bark beetle-affected forest area in Alaska, USA. They achieved the best classification accuracy when they used both spectral and structural features; the overall accuracy was 78% (kappa: 0.64) when using UAV-based photogrammetric point clouds and multispectral image mosaics and 78% (kappa: 0.65) when using Lidar-based structural and hyperspectral features collected by the G-LiHT system. Safonova et al. [
32] studied the detection of the invasion of the four-eyed fir bark beetle (
Polygraphus proximus Blandford) in fir forests (
Abies sibirica Ledeb) in Russia using a RGB camera from UAV. They proposed a two-stage solution; first searching for the potential tree crowns and in the second stage using a convolutional neural network (CNN) architecture to predict the fir tree damage stage in each detected candidate region. However, the effect of phenology on mapping tree vitality using UAV-multispectral imagery has not been investigated.
The objective of this study was to investigate the capabilities of UAV-based multispectral imagery in detecting declined trees at two different data collection times and compare the effect of phenology and data acquisition timing on the classification accuracy of declined trees. The tree decline was mainly caused by an ongoing bark beetle infestation. We hypothesized that the data acquisition timing, phenology, and life cycle stages of the bark beetle affect the detection accuracy of declined trees. To test this hypothesis, we collected field and UAV-based data in four forest areas on two occasions in May and September 2020. We also investigated the transferability of tree decline detection classifiers between the study areas. Transferable classifiers would greatly reduce the costs of tree decline mapping by reducing the need for costly field work. Our overarching aim is to support the development of remote sensing applications for detecting declined trees and mapping of bark beetle infestation.
4. Discussion
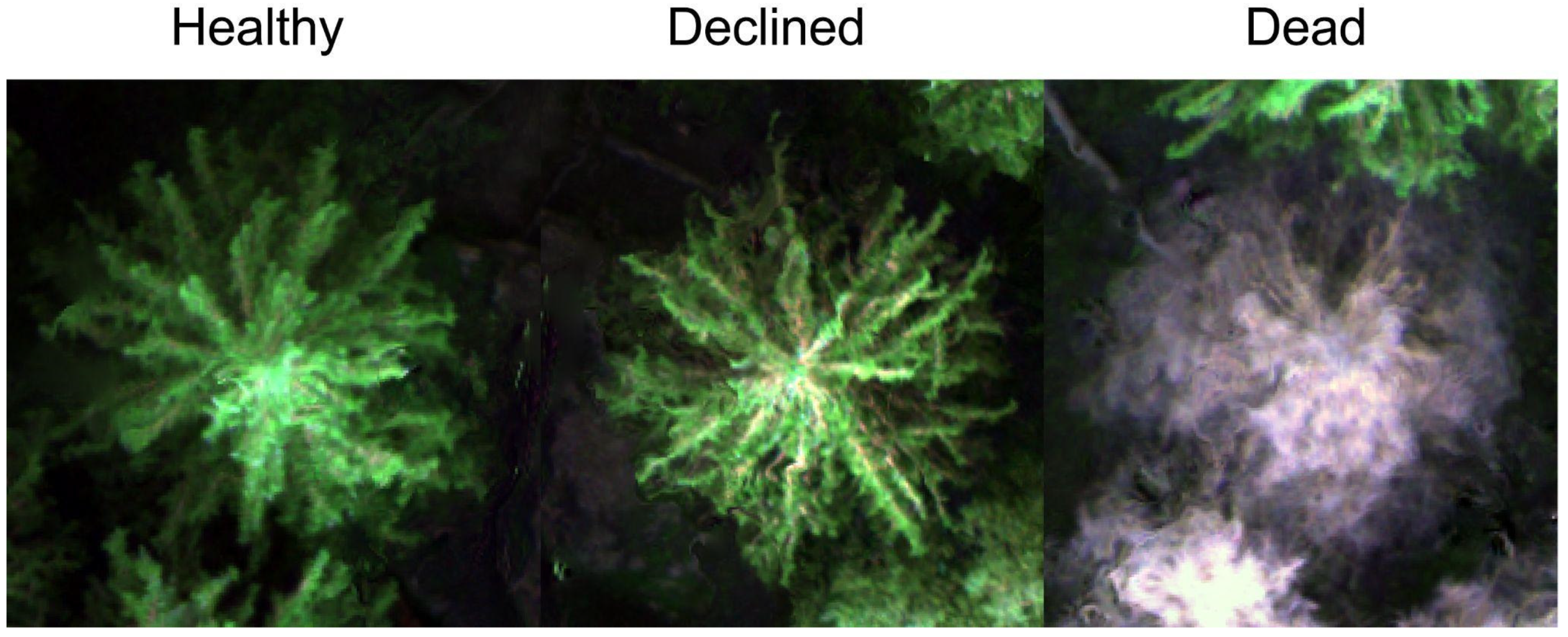
The aim of this study was to investigate the capabilities of UAV-based multispectral imagery in detecting declined trees at two different data collection times when bark beetle infestation had separate active statuses based on a life cycle of the species. Further, we aimed to compare the effect of data acquisition timing on the detection accuracy of declined trees. We hypothesized that the data acquisition timing and tree phenology affect the detection accuracy of declined trees. We also investigated the transferability of the trained Random Forest models in the detection of tree decline classes between the four study areas. To test how data acquisition timing and phenology affects the detection accuracy of declined trees, we developed a Random Forest based classification approach for classifying Norway spruces into various health classes, including healthy, declined and dead. The average overall accuracy and MICE value were 78.2% and 0.66, respectively, in spring and 84.5% and 0.76, respectively, in fall. When considering all the study areas, the mean accuracies of the healthy, declined and dead classes were 80.4%, 54,2% and 95.7%, respectively, for the spring dataset, and 82.8%, 64.4% and 98.7%, respectively, for the fall dataset. Considering the area-specific results, the best results were 91.4%, 58.7% and 100%, respectively, in Area 1 in spring, and 88.5%, 65.4% and 99.2%, respectively, in Area 4 in fall. Based on our results, it seems that data acquired during fall or the end of summer before winter dormancy provides more accurate tree vitality classification compared to data acquired during the spring.
There were differences between spring and fall reflectance factors, which were at least partially due to the non-optimal radiometric correction. In Area 4, band 5 was brighter in relation to the other bands than in the other areas. One possible explanation for this could be that in datasets in Area 4 were collected using the Micasense Altum while the other areas were collected using the Micasene RedEdge M. In the spring dataset, Area 4 the declined class appeared to have lower reflectance factors than the healthy class, which is opposite to all other datasets. We could not find any explanation for this behavior. The differences in reflectance factors are also a likely explanation to the high importance of NDI type reflectance features in classifying tree vitality classes, because vegetation indices are able to partly reduce the effect of varying illumination conditions. The NDIedge-red spectral features showed the highest importance in classifying tree vitality in both spring and fall datasets; thus, the feature selection was similar between the data acquisition timings.
The results of this study were in line with previous studies that used UAV-imagery for monitoring of tree vitality conditions. For example, Näsi et al. [
25] obtained with the SVM classifier using hyperspectral images, collected in August, showing producer’s accuracies of 89%, 47% and 58%, for healthy, infested and dead classes, respectively. When using the independent test dataset, the leave-one-out producer’s accuracies were 86%, 67% and 81%, respectively. The results of this study are also in line with the study of Kloucek et al. [
27] where the best results were obtained in the end of the infestation period (overall accuracy: 96%) 78%–96% with a Maximum Likelihood classifier with less than 55 reference trees. In the study of Honkavaara et al. [
42], there was not such a high difference in classification accuracies between different dates. The comparison to this study is not as straightforward since the time span was shorter (August–October), when all trees stayed in the green-attack phase during the data collection period, indicating a low colonization rate. Further, many trees in the area were suffering from root rot. Potential explanations for the better accuracies in the present study were the larger number of reference trees that managed to explain the data more comprehensively as well as the potentially better performance of the Random Forest classifier than SVM or Maximum Likelihood classifiers.
Considering the data collection timing and phenology aspects, it appeared that the fall dataset provided better results than the spring dataset. For example, the overall accuracy for the combined classifier was 78.2% in spring and 84.5% in fall and the corresponding averages for the area-specific classifiers were 79.4% and 85.7%. Similar conclusions could be obtained from the analysis of the health classification results. The better results in fall could be explained by the smaller deviation in the autumn dataset as the spectral response of the new growth approaches the response of the growth in earlier years, whereas in spring the varying amount of bright green colour causes variability for the spectral values. The growth of needles and leaves was only starting in the spring dataset, thus, there may be considerable variation in the spring phenology of individual trees due to differences in microclimate, soil temperature and aspect in relation to the sun, which could cause increased variation in spectral responses.
The illumination conditions influence the reflectance factors due to the anisotropic behaviour of the canopy reflectance. The solar elevation was 35.7–49.3° in the spring dataset and 23.2–31.9° in the fall dataset, the larger variation in the spring dataset might have contributed to the larger reflectance factor differences in comparison to the fall dataset. Furthermore, the illumination conditions varied between mostly cloudy and completely sunny, which could also have an impact. For example, the large solar elevation differences of 24.9°–31.44° and variation from mostly cloudy to sunny conditions might have caused the great differences in the comparison for fall datasets of Area 3 and 4. The best similarities were obtained between Area 1 and 2, which were captured in sunny conditions within two hours in spring as well as in mostly sunny conditions and only with approx. 5° solar elevation difference in fall.
We also investigated the transferability of the developed RF-model in classifying tree decline classes. The best overall accuracies of the transformed models were 74.5% and 78.7%, and the best MICE values were 0.61 and 0.67, respectively, for the spring and autumn, and these were obtained using the Area 3 data to train the classifier, which might be due to forest structural and spectral similarity to other areas. When training and testing with the datasets observed to be statistically similar, the results improved, providing the best overall accuracy of 81.6% and 83.7% and MICE values of 0.73 and 0.75, respectively to the spring and fall datasets. Although the results seem promising, they were not stable and further improvements in the methodology are needed to make this approach more reliable. Particularly, there appeared quite large differences in reflectance values in different datasets, which were likely to be at least partially due to the non-modelled factors in the radiometric processing of the standard radiometric processing chain that was used in this study. The recent review by Aasen et al. [
43] suggested various techniques for radiometric processing. The state-of-the-art techniques provide tools for atmospheric correction [
44,
45]. However, the methods for accounting for the reflectance anisotropy are still missing from most of the presented processing chains; one of the existing solutions is the radiometric block adjustment presented by Honkavaara et al. [
46]. By solving the deviations caused by the illumination, the amount of reference data for the classifiers could be decreased and this way better efficiency could be obtained for the tree vitality mapping processes. It is also interesting to notice that there were not great differences between the results of the combined classifier or the average/median values from the separate area classifiers. This indicates that the Random Forest could explain differences due to solar elevations and illumination conditions. However, in further studies also the novel algorithms such as convolutional neural networks and the deep learning techniques will be of interest. For example Safonova et al. [
32] obtained promising results by using a RGB camera for classifying tree decline classes caused by a bark beetle (
P. proximus) in fir forest.
We assigned various trees having symptoms to the “declined” class, thus we did not separate the spruces in the “green-attack” phase and the more yellowish phases. We will continue the analysis to evaluate if the “green-attacked” trees could be separated from the other phases, which would enable the efficient management of the bark beetle infestation, e.g., by enabling sanitation cutting of colonized trees before the swarming of the following generation. Particularly the novel narrow-band hyperspectral sensors suitable for UAVs are highly promising tools for identifying small changes in tree vitality even before they can be observed via visual assessment of the crown as stated Einzmann et al. [
47] using hyperspectral needle reflectance measured in the ground and hyperspectral crown reflectance measured from aircraft. Utilizing the proposed approach, it will be possible to generate tree vitality maps cost efficiently from forest areas. By optimizing the timing of data collection, one can improve tree decline classification accuracy, and transferable machine learning models increase the cost-efficiency of UAV-based tree decline monitoring. The information on tree decline is also relevant for developing risk models to estimate potential forthcoming disturbance and knowledge considering the distribution spread of the bark beetle infestation in forests. The frequent maps will provide information for decision makers and forest managers to support their forest management towards climate and pest insect resilient forests.


 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}