
Comparative Analysis of Multi-Platform, Multi-Resolution, Multi-Temporal LiDAR Data for Forest Inventory

 , ,
, ,  ,
,  , , and
, , and 
Abstract
:1. Introduction
- A wide range of LiDAR modalities, including linear and Geiger-mode LiDAR from manned aircraft systems, and multi-beam LiDAR from UAV and Backpack systems, are analyzed.
- A comprehensive investigation of point cloud characteristics and geolocation accuracy is conducted, laying the foundations of multi-platform, multi-resolution, and multi-temporal data fusion.
- A comparative analysis that focuses on forest inventory capabilities and discusses the effect of canopy cover is presented, providing directions for selecting appropriate LiDAR modalities and data processing tools for different applications.
2. Data Acquisition Systems and Datasets Description
2.1. Mobile LiDAR Systems
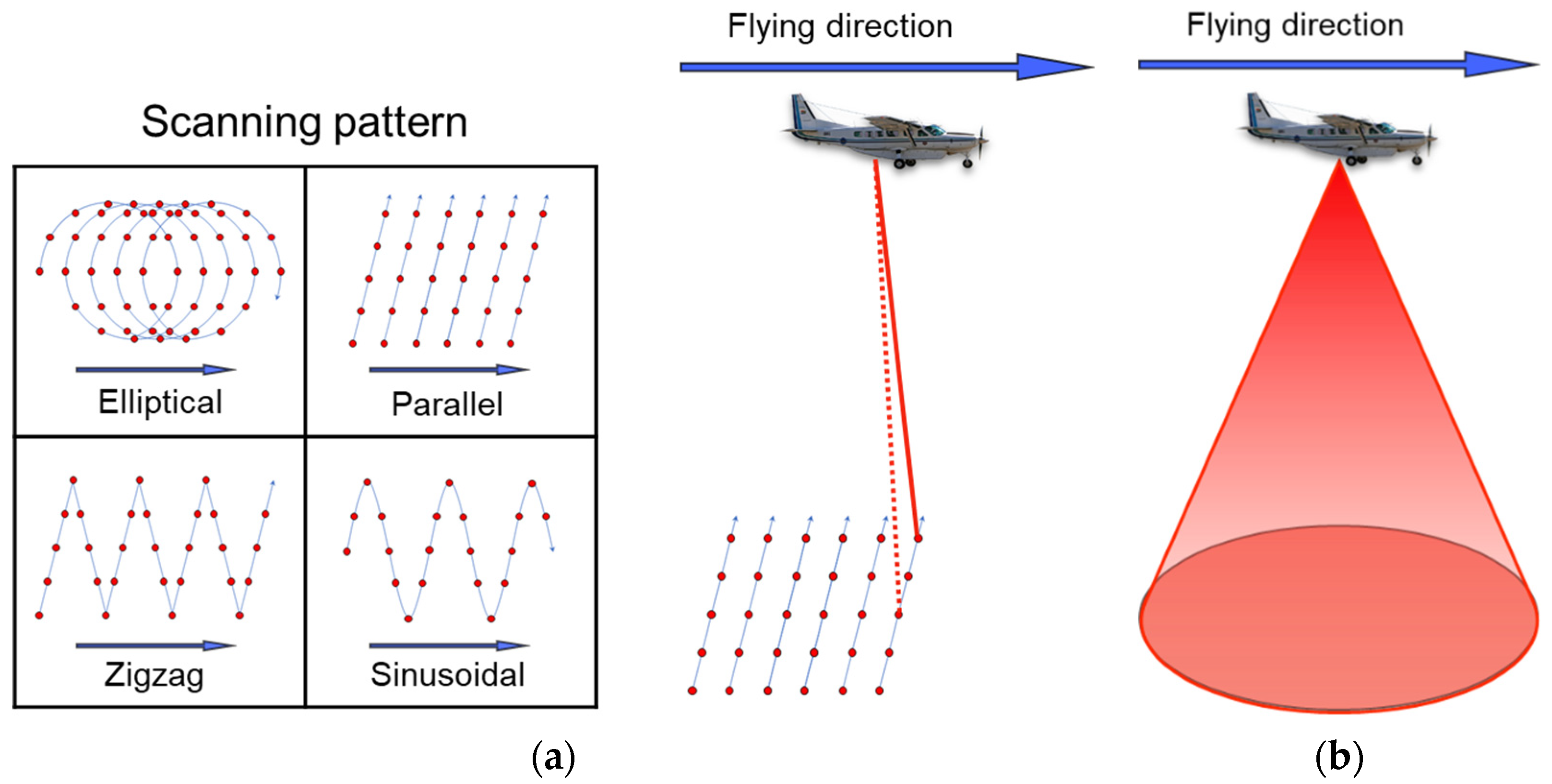
2.1.1. Linear LiDAR
2.1.2. VeriDaaS Geiger-Mode LiDAR System
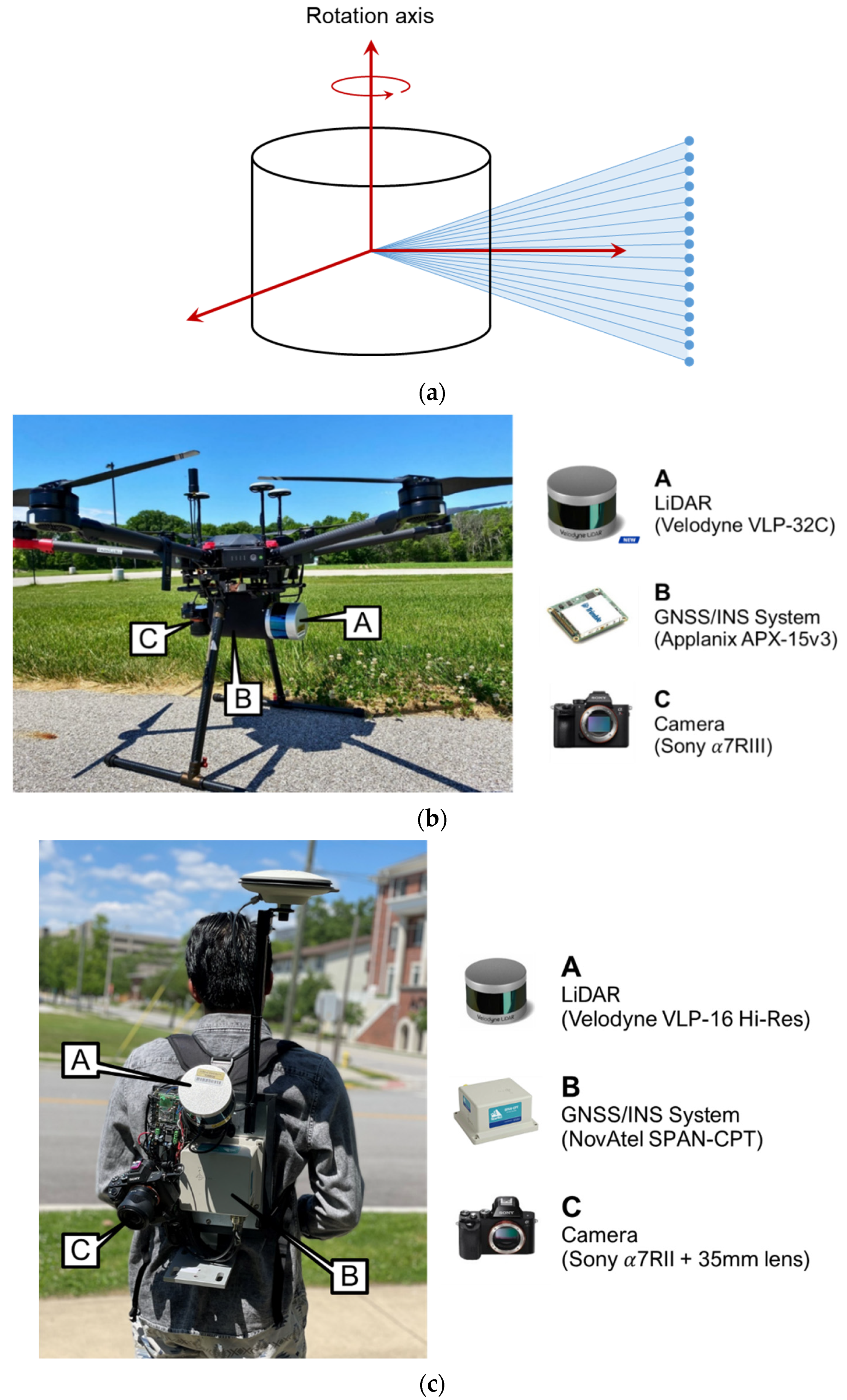
2.1.3. UAV and Backpack Systems
2.2. Study Site and Dataset Description
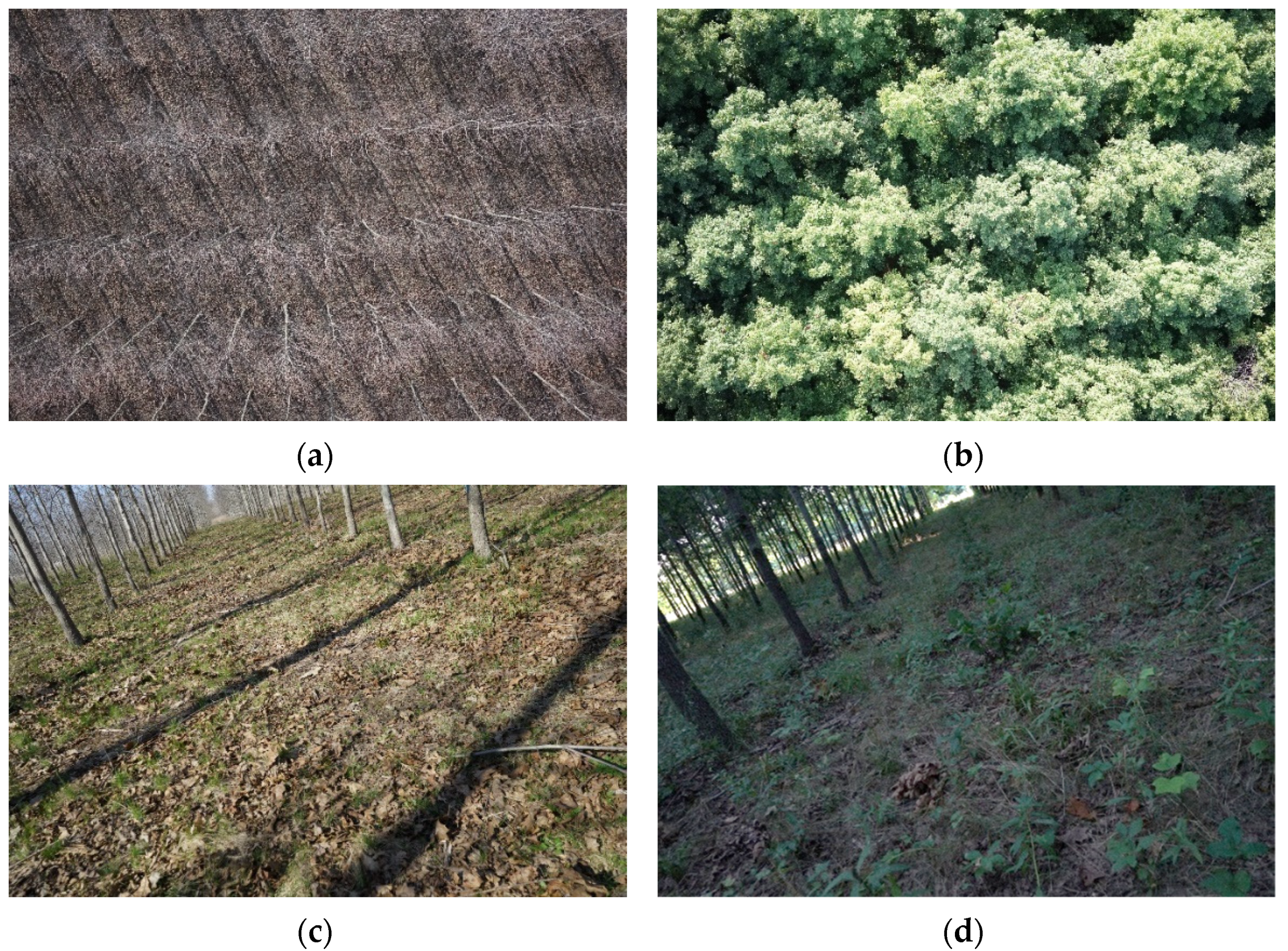
2.2.1. Study Site
2.2.2. USGS Statewide LiDAR Data
2.2.3. VeriDaaS Geiger-Mode LiDAR Data
2.2.4. UAV LiDAR Data
2.2.5. Backpack LiDAR Data
3. Methodology
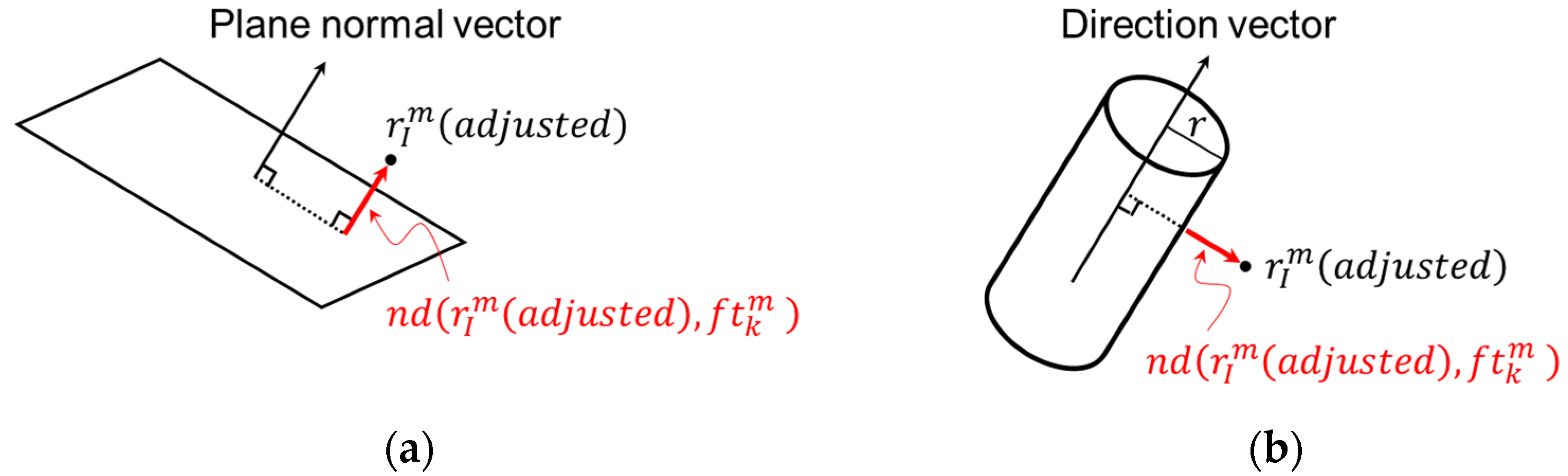
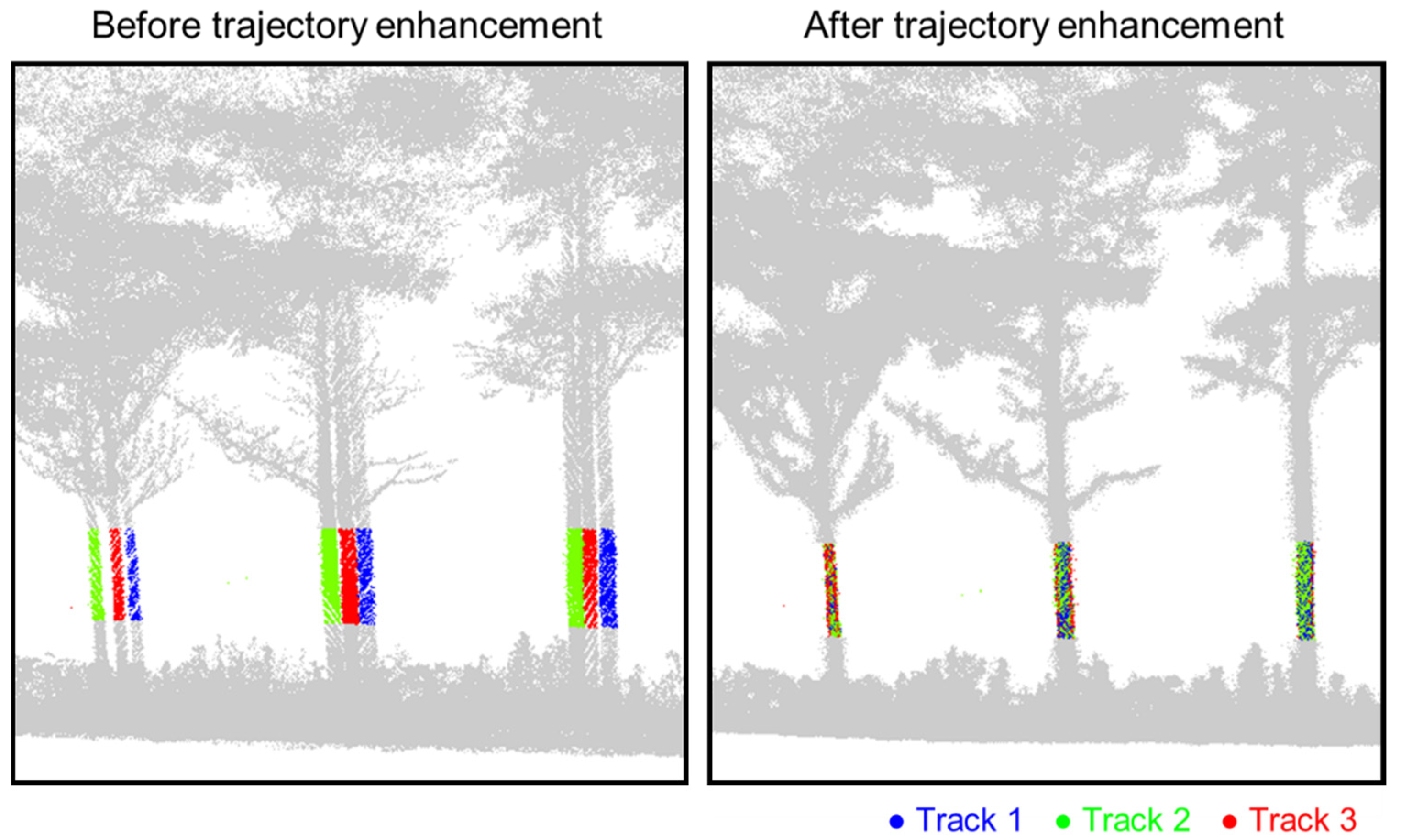
3.1. Trajectory Enhancement for Backpack Data
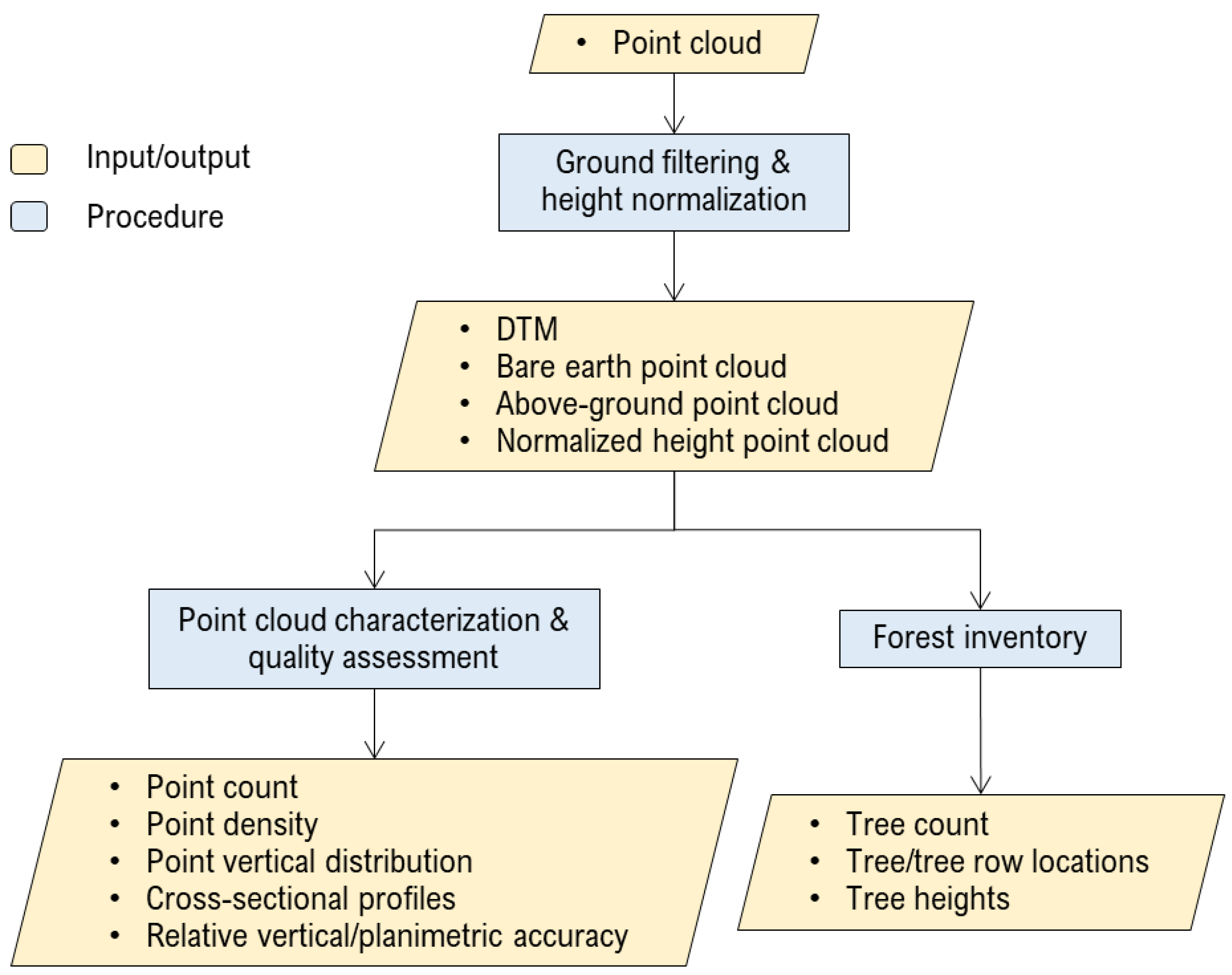
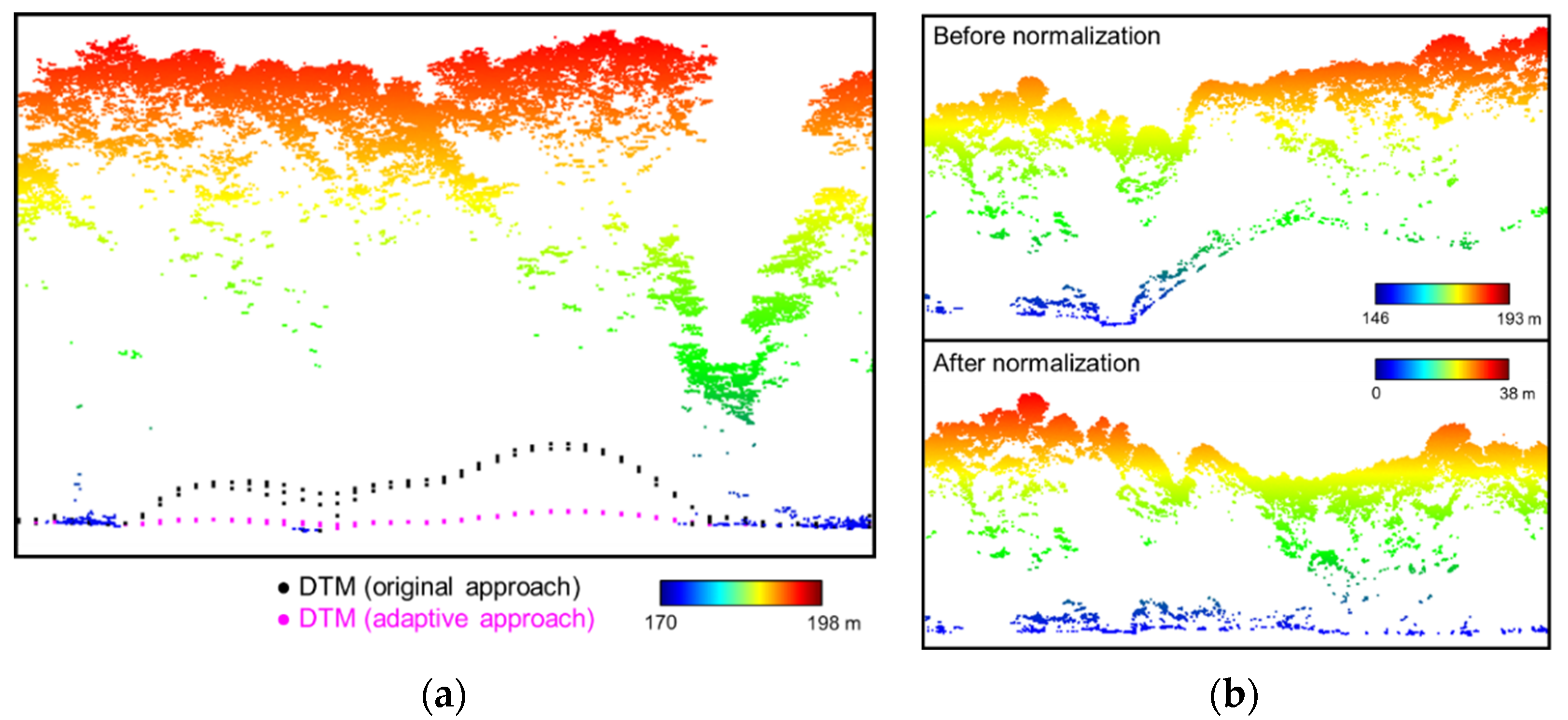
3.2. Ground Filtering and Height Normalization
3.3. Point Cloud Characterization and Quality Assessment
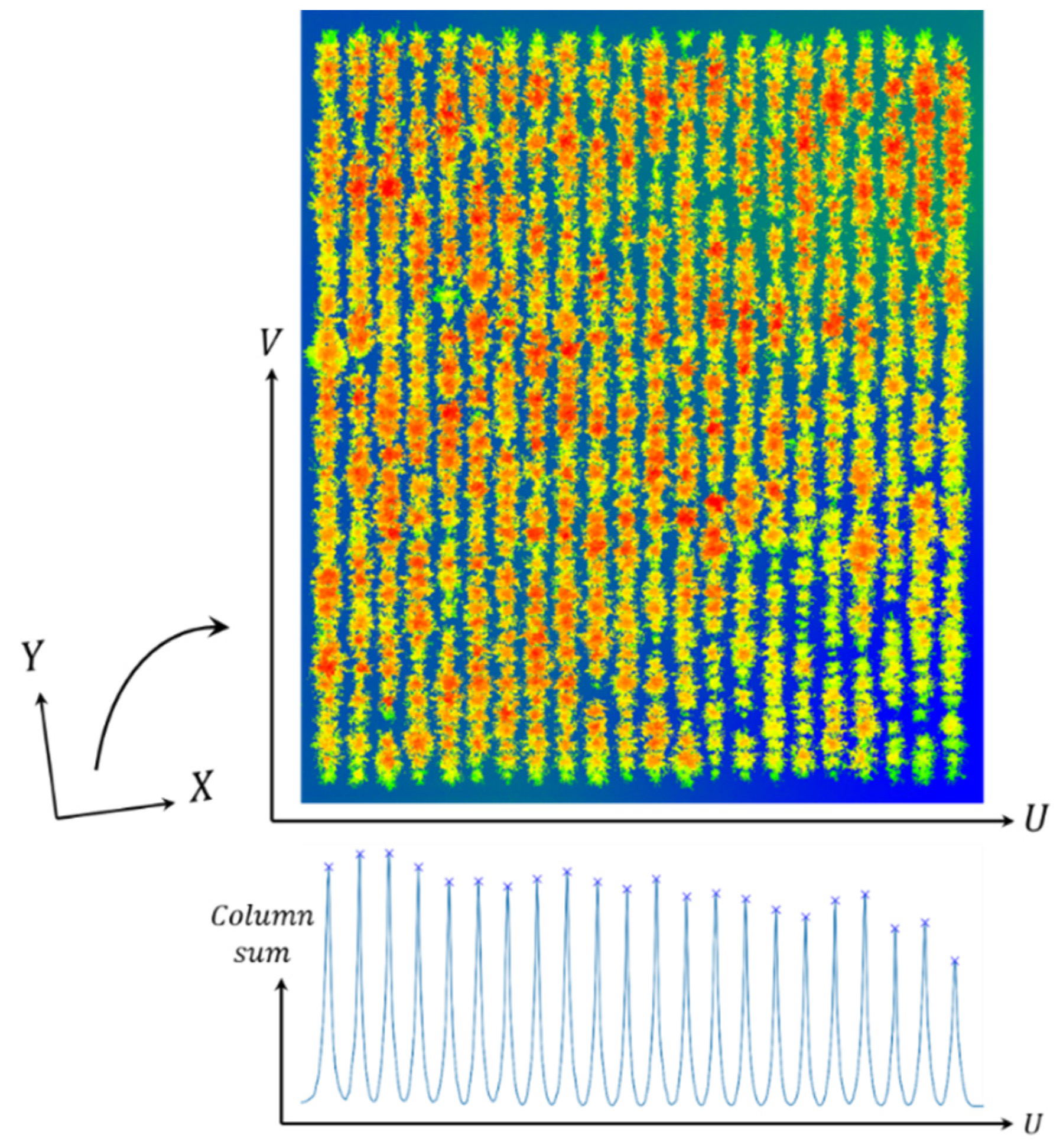
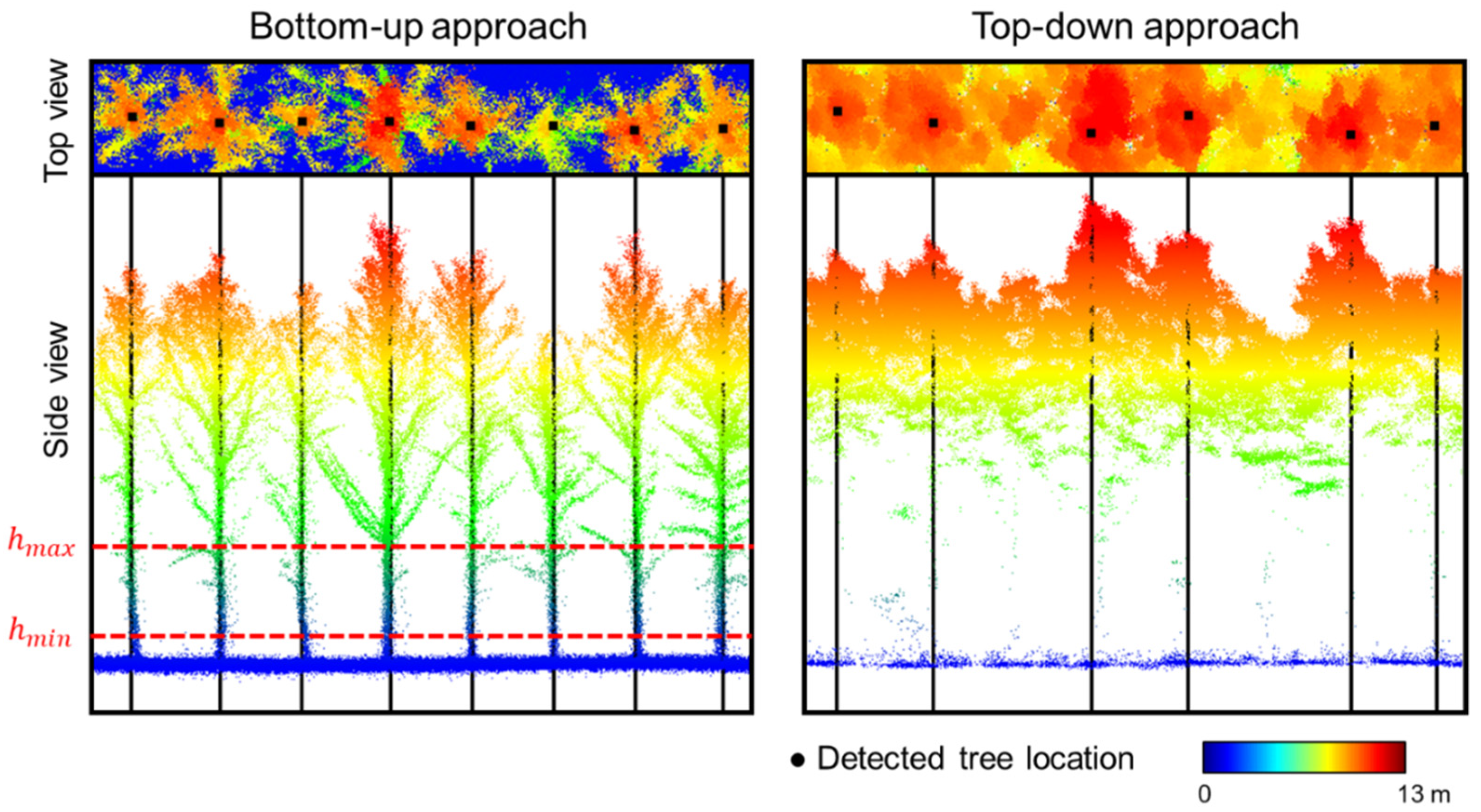
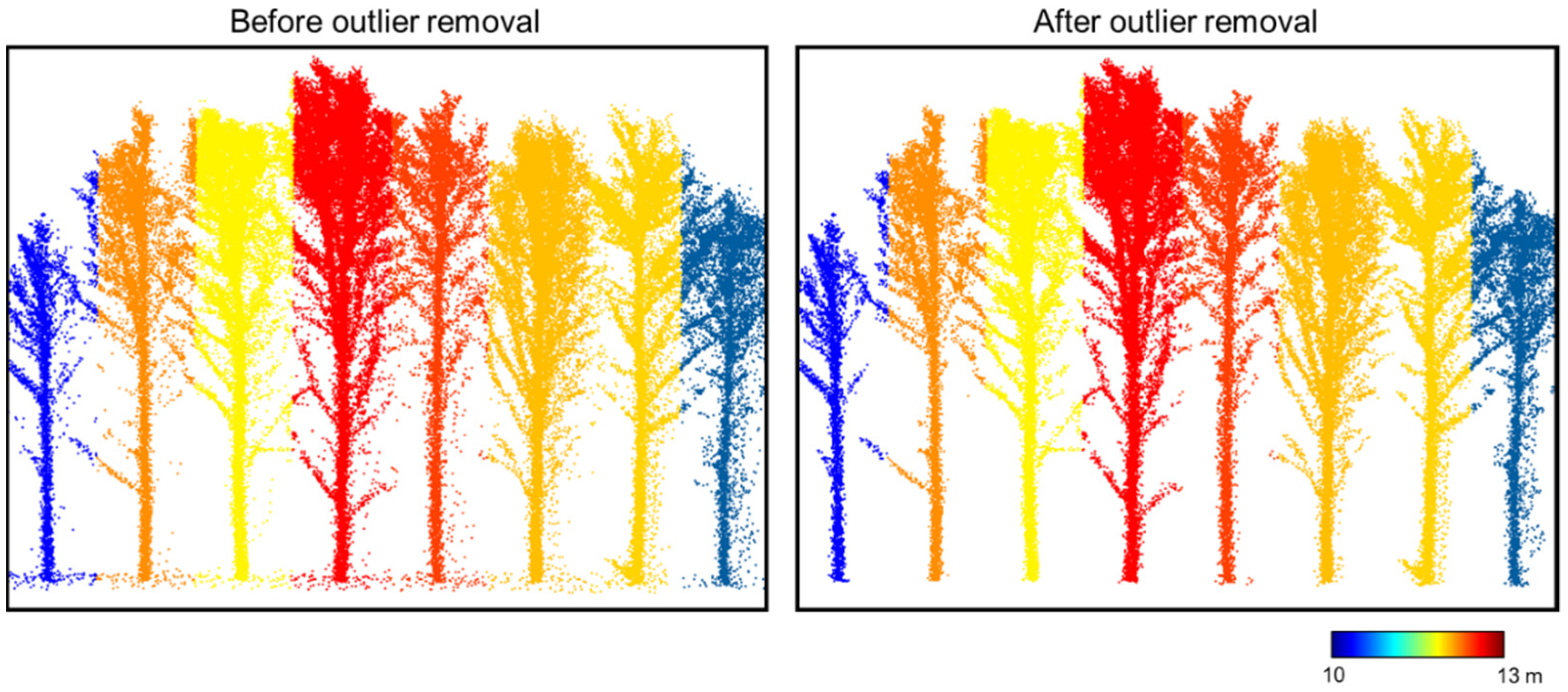
3.4. Forest Inventory
4. Experimental Results
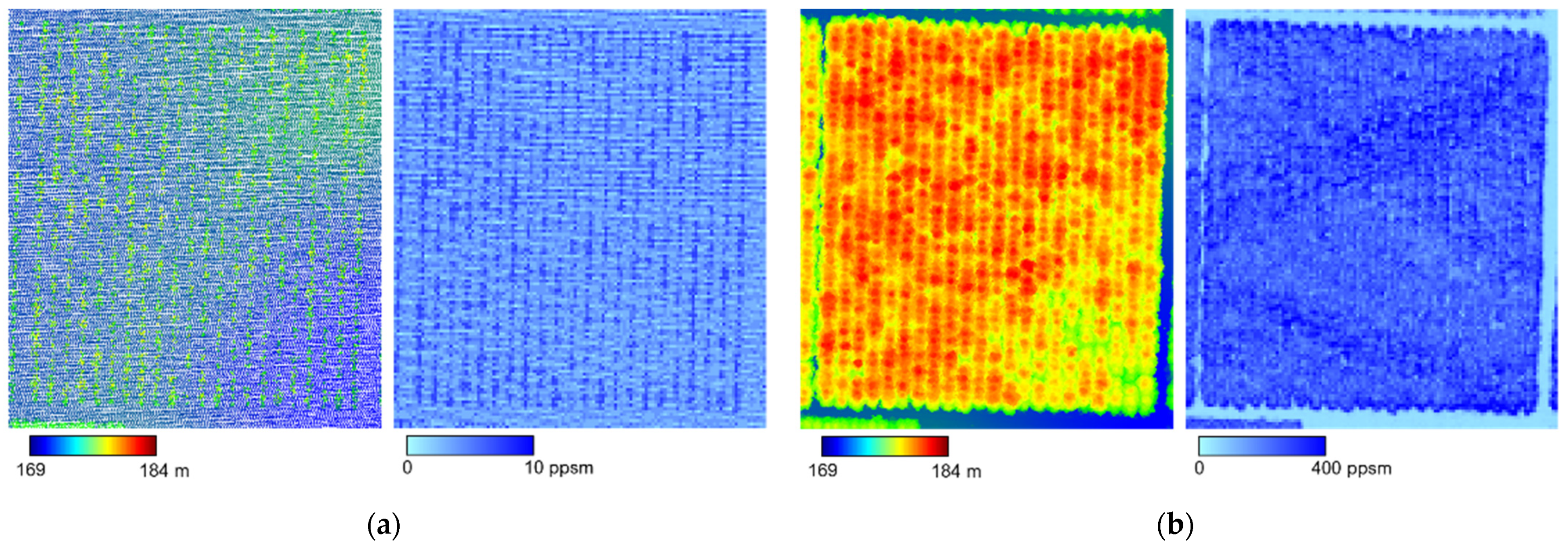
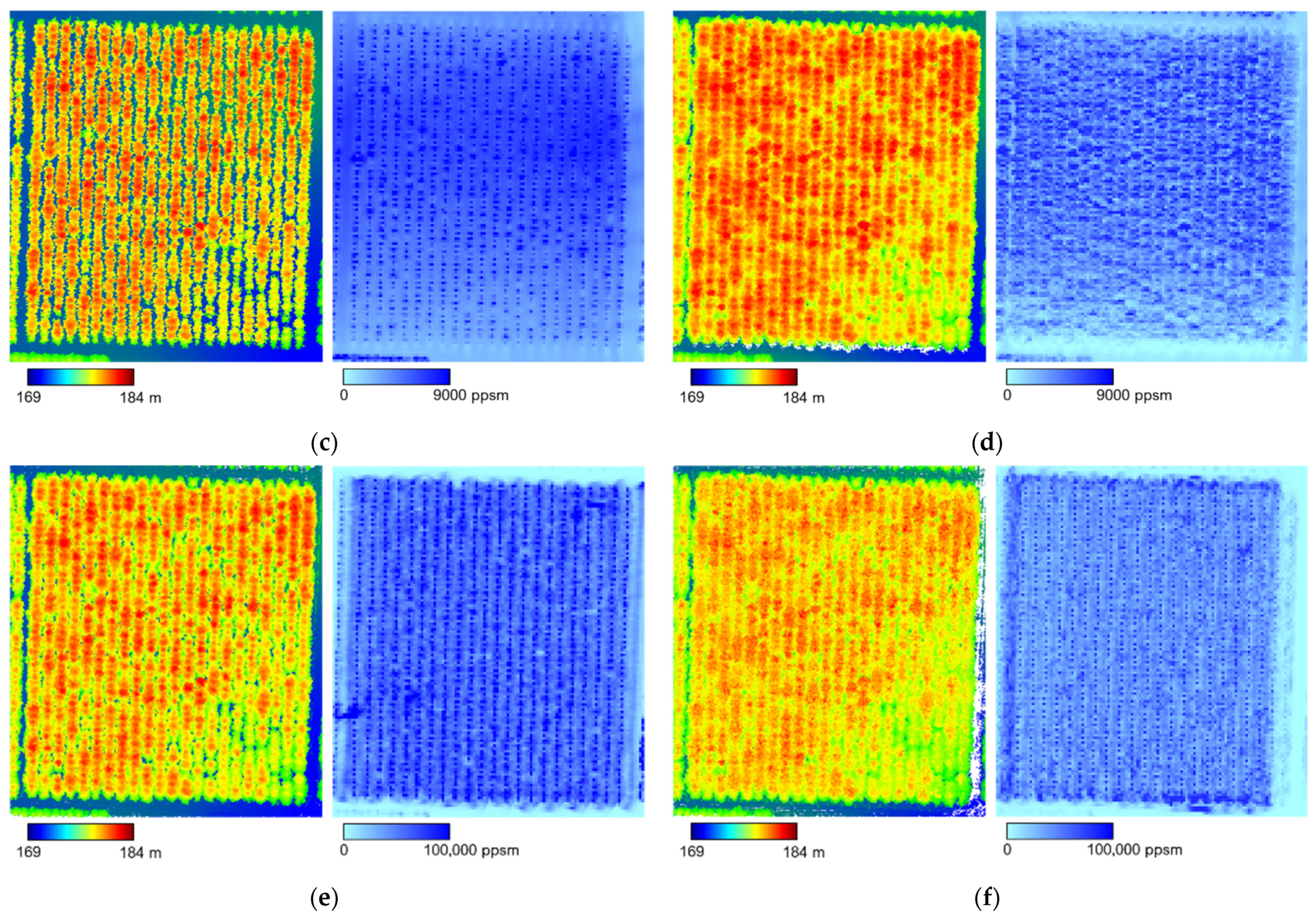
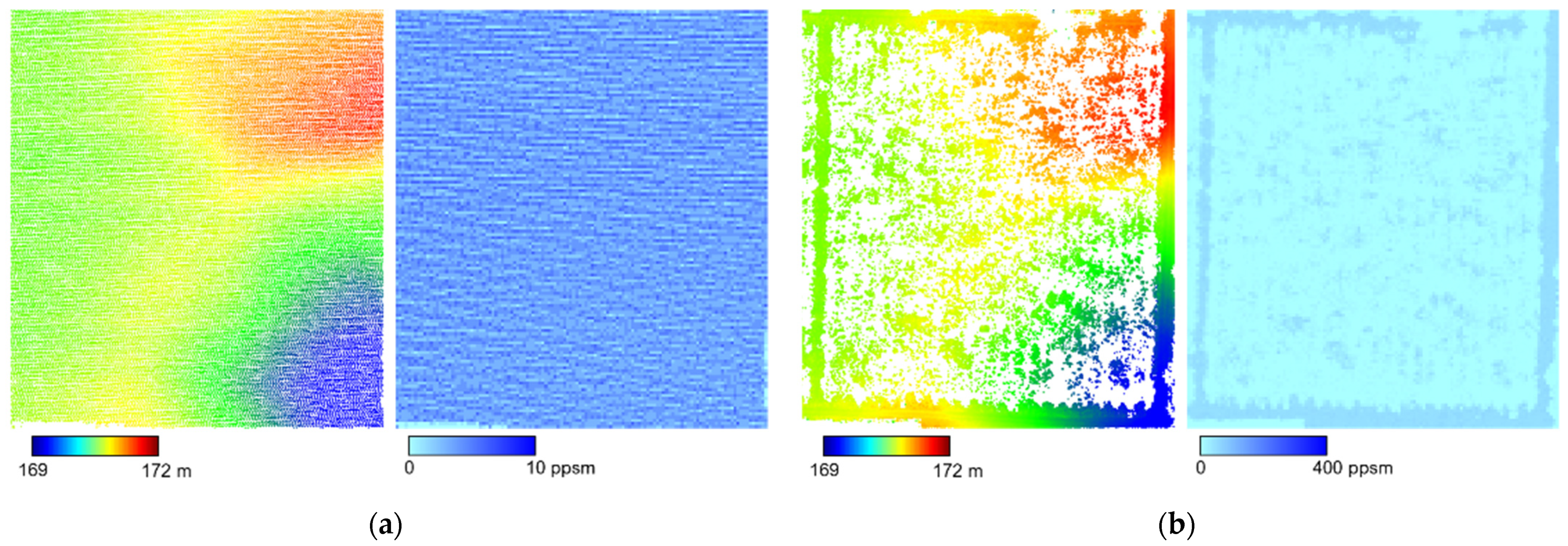
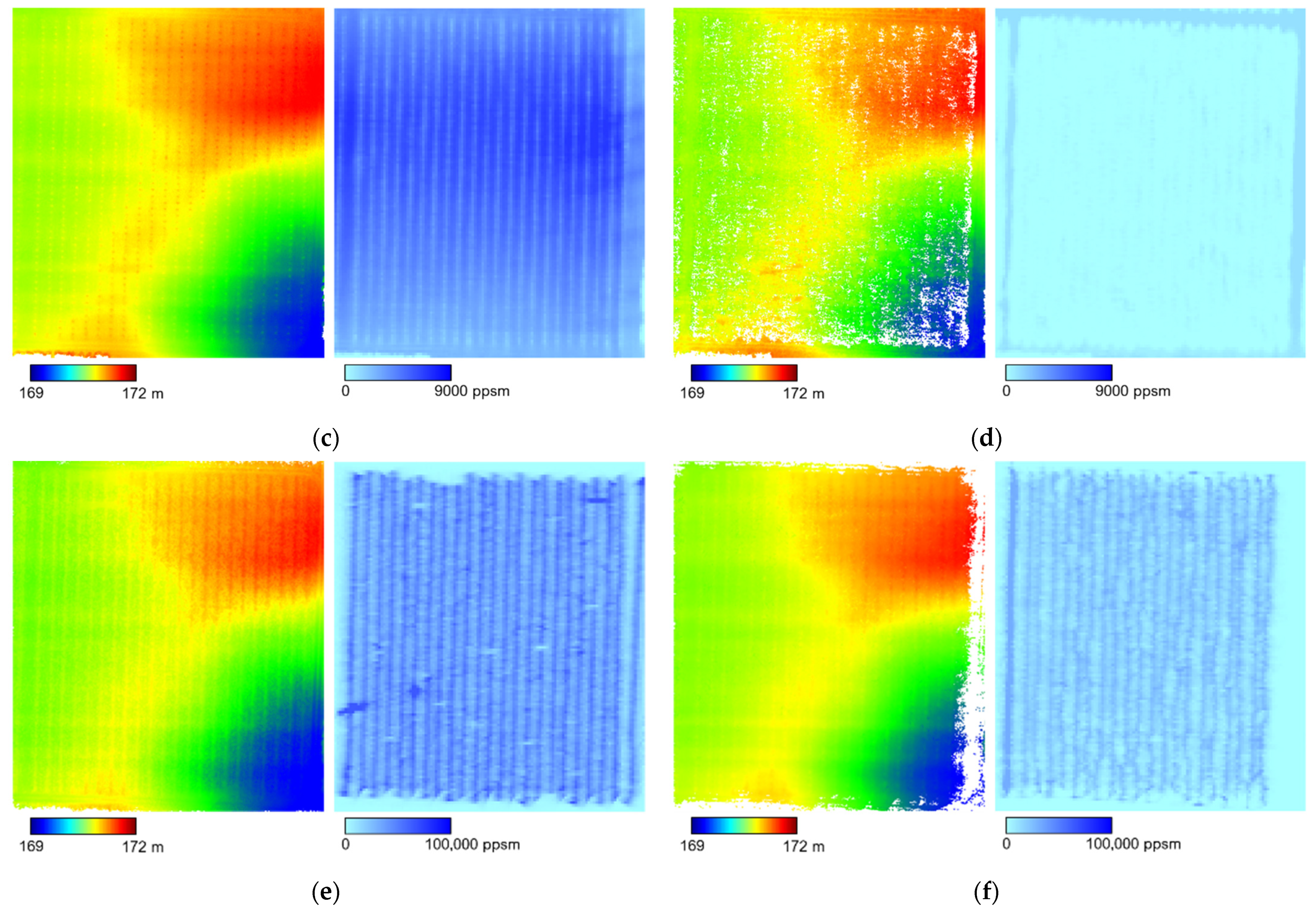
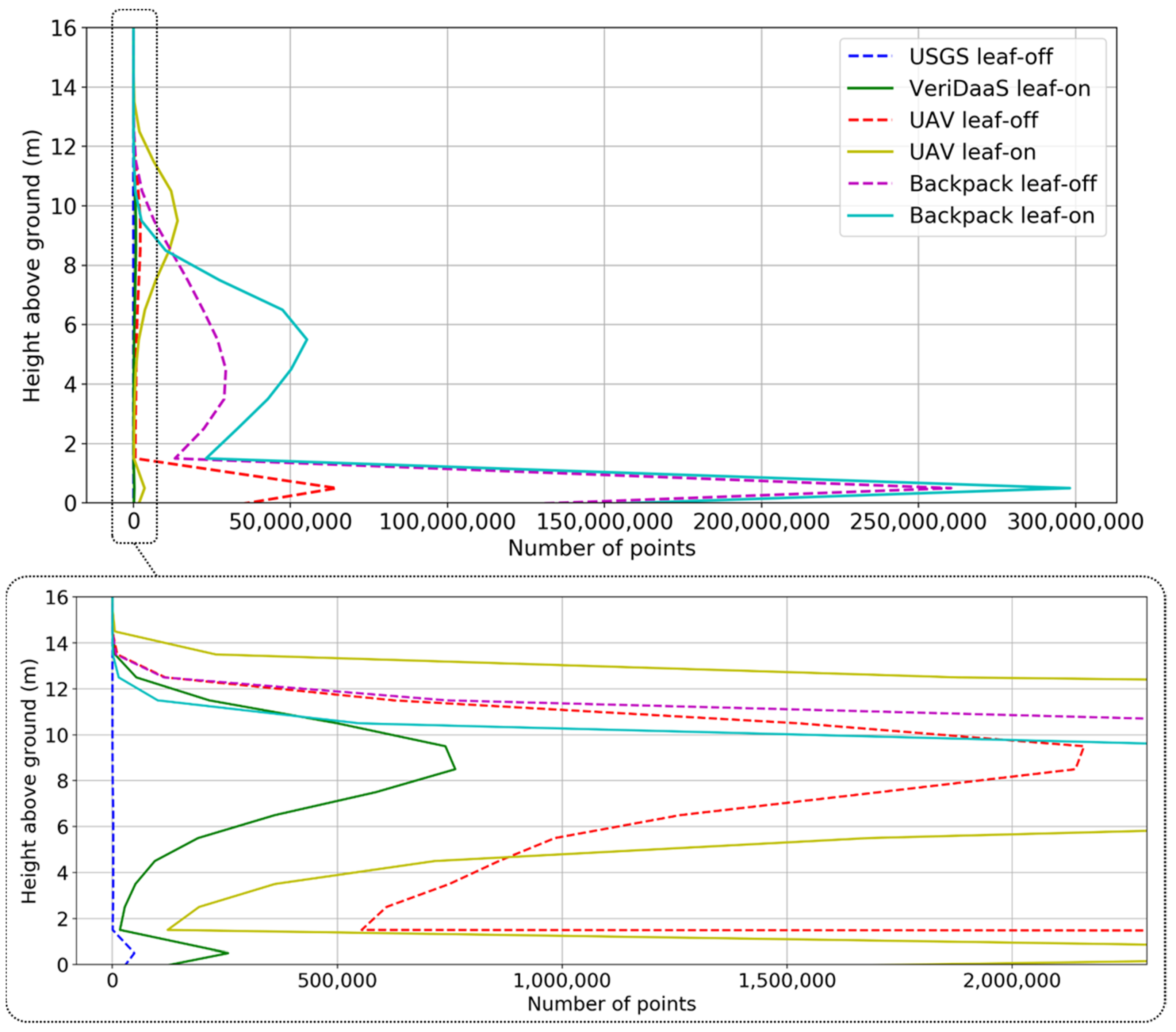
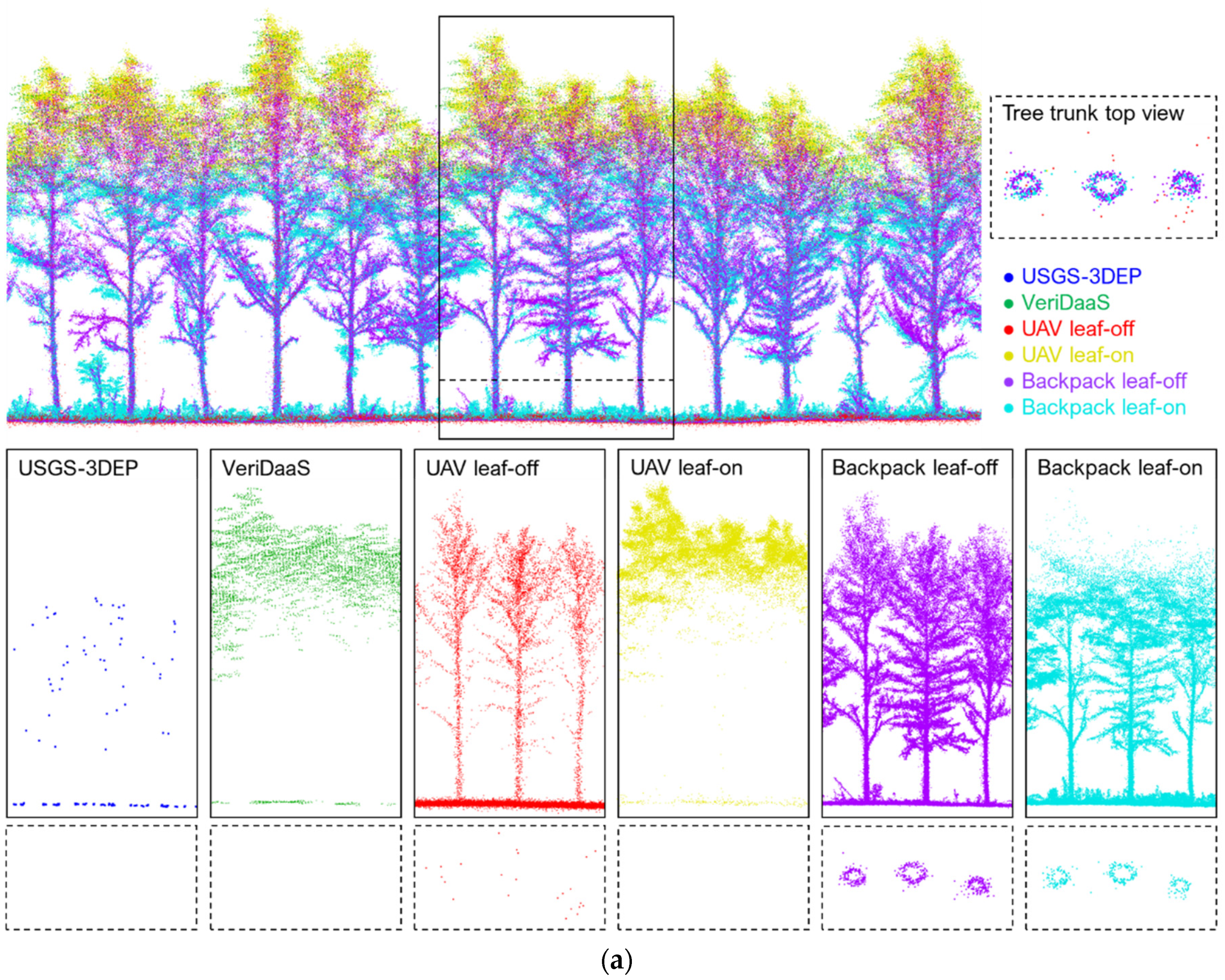
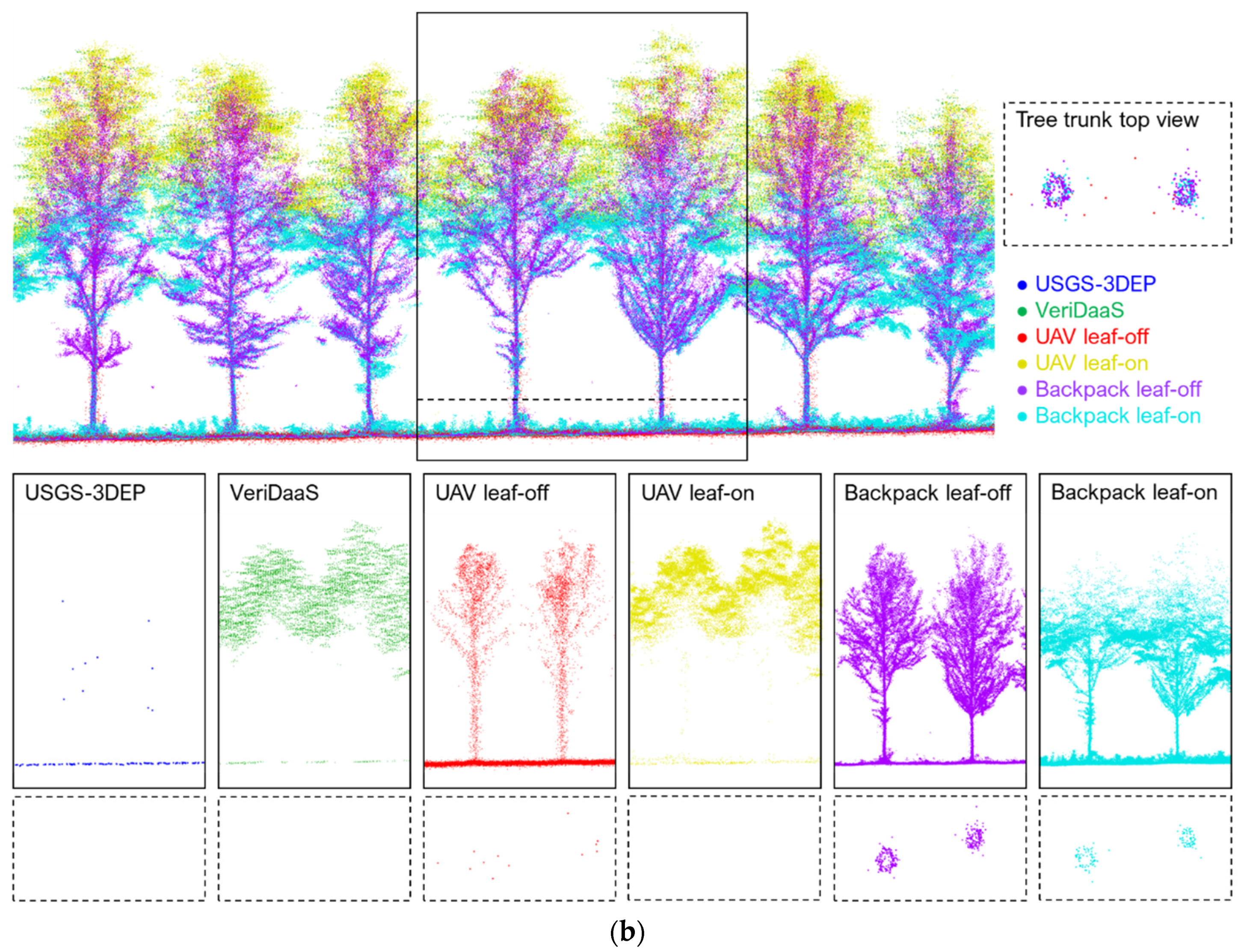
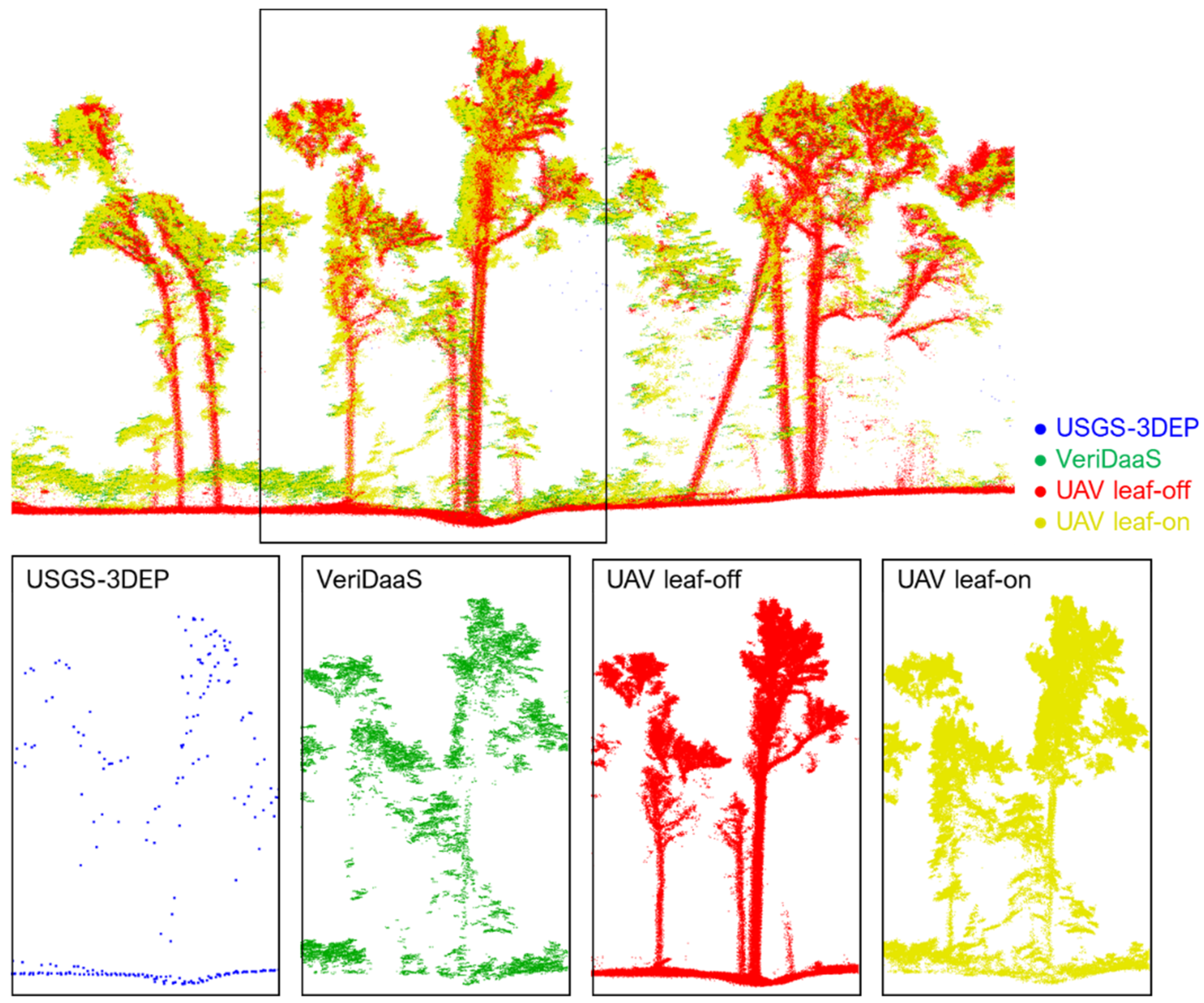
4.1. Point Cloud Characteristics
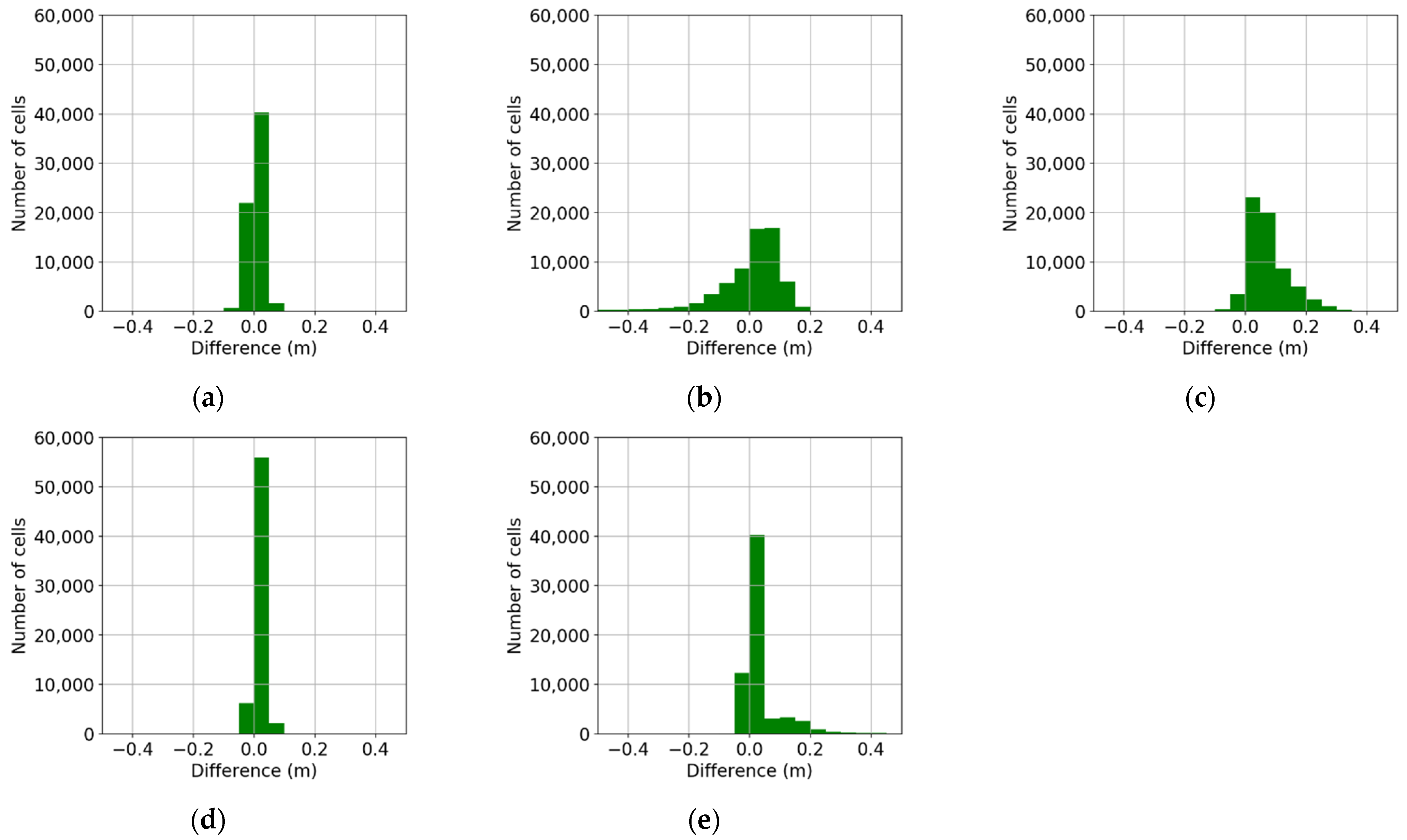
4.2. Quantitative Assessment of Relative Data Quality
- UAV leaf-off vs. USGS-3DEP (leaf-off) datasets;
- UAV leaf-on vs. VeriDaaS (leaf-on) datasets;
- UAV leaf-off vs. UAV leaf-on datasets;
- UAV leaf-off vs. Backpack leaf-off datasets;
- UAV leaf-off vs. Backpack leaf-on datasets.
4.3. Forest Inventory Metrics
5. Discussion
- The Geiger-mode LiDAR provides denser point clouds while operating at a higher altitude. In this study, the median of the planimetric point density for Geiger-mode and linear LiDAR datasets is 248 ppsm and 4 ppsm, respectively. The flying height of the Geiger-mode and linear LiDAR systems is approximately 3700 m and 2000 m above ground, respectively.
- The Geiger-mode LiDAR captures a much higher level of information as compared to linear LiDAR. In fact, the level of information obtained by the Geiger-mode LiDAR is found to be close to that captured by the UAV LiDAR (refer to Figure 16).
- Both the Geiger-mode and linear LiDAR effectively characterize the terrain in the study site. The Geiger-mode LiDAR is able to deliver forest attributes including individual tree counts, tree locations, and tree heights with accuracy comparable to those from the UAV LiDAR. The linear LiDAR, on the other hand, fails to capture individual trees, and it is unclear from this study whether it can reliably derive canopy height.
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, Y.; Birdsey, R.A.; Fang, J.; Houghton, R.; Kauppi, P.E.; Kurz, W.A.; Phillips, O.L.; Shvidenko, A.; Lewis, S.L.; Canadell, J.G.; et al. A Large and Persistent Carbon Sink in the World’s Forests. Science 2011, 333, 988–993. [Google Scholar] [CrossRef] [Green Version]
- Bonan, G.B. Forests and climate change: Forcings, feedbacks, and the climate benefits of forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [Green Version]
- Dorren, L.K.A.; Maier, B.; Seijmonsbergen, A.C. Improved Landsat-based forest mapping in steep mountainous terrain using object-based classification. For. Ecol. Manag. 2003, 183, 31–46. [Google Scholar] [CrossRef]
- Pax-Lenney, M.; Woodcock, C.E.; Macomber, S.A.; Gopal, S.; Song, C. Forest mapping with a generalized classifier and Landsat TM data. Remote Sens. Environ. 2001, 77, 241–250. [Google Scholar] [CrossRef]
- Lang, N.; Schindler, K.; Wegner, J.D. Country-wide high-resolution vegetation height mapping with Sentinel-2. Remote Sens. Environ. 2019, 233, 111347. [Google Scholar] [CrossRef] [Green Version]
- Osco, L.P.; dos Santos de Arruda, M.; Marcato Junior, J.; da Silva, N.B.; Ramos, A.P.M.; Moryia, É.A.S.; Imai, N.N.; Pereira, D.R.; Creste, J.E.; Matsubara, E.T.; et al. A convolutional neural network approach for counting and geolocating citrus-trees in UAV multispectral imagery. ISPRS J. Photogramm. Remote Sens. 2020, 160, 97–106. [Google Scholar] [CrossRef]
- Li, W.; Fu, H.; Yu, L.; Cracknell, A. Deep learning based oil palm tree detection and counting for high-resolution remote sensing images. Remote Sens. 2017, 9, 22. [Google Scholar] [CrossRef] [Green Version]
- Akay, A.E.; Oǧuz, H.; Karas, I.R.; Aruga, K. Using LiDAR technology in forestry activities. Environ. Monit. Assess. 2009, 151, 117–125. [Google Scholar] [CrossRef]
- Wulder, M.A.; Bater, C.W.; Coops, N.C.; Hilker, T.; White, J.C. The role of LiDAR in sustainable forest management. For. Chron. 2008, 84, 807–826. [Google Scholar] [CrossRef] [Green Version]
- Guo, Q.; Su, Y.; Hu, T.; Guan, H.; Jin, S.; Zhang, J.; Zhao, X.; Xu, K.; Wei, D.; Kelly, M.; et al. Lidar Boosts 3D Ecological Observations and Modelings: A Review and Perspective. IEEE Geosci. Remote Sens. Mag. 2021, 9, 232–257. [Google Scholar] [CrossRef]
- Pang, Y.; Feng, Z.; Zeng-yuan, L.; Shu-Fang, Z.; Guang, D.; Qing-Wang, L.; Er-Xue, C. Forest height inversion using airborne LiDAR technology. J. Remote Sens. 2008, 12, 158. [Google Scholar]
- Jarron, L.R.; Coops, N.C.; MacKenzie, W.H.; Tompalski, P.; Dykstra, P. Detection of sub-canopy forest structure using airborne LiDAR. Remote Sens. Environ. 2020, 244, 111770. [Google Scholar] [CrossRef]
- Chen, Z.; Gao, B.; Devereux, B. State-of-the-art: DTM generation using airborne LIDAR data. Sensors 2017, 17, 150. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, Y.C.; Liu, J.; Fei, S.; Habib, A. Leaf-off and leaf-on uav lidar surveys for single-tree inventory in forest plantations. Drones 2021, 5, 115. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, J.; Chen, X.; Pang, S.; Zeng, H.; Shen, Z. Accuracy assessment and error analysis for diameter at breast height measurement of trees obtained using a novel backpack LiDAR system. For. Ecosyst. 2020, 7, 33. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q.; Jin, S.; Guan, H.; Sun, X.; Ma, Q.; Hu, T.; Wang, R.; Li, Y. The Development and Evaluation of a Backpack LiDAR System for Accurate and Efficient Forest Inventory. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1660–1664. [Google Scholar] [CrossRef]
- Paris, C.; Valduga, D.; Bruzzone, L. A Hierarchical Approach to Three-Dimensional Segmentation of LiDAR Data at Single-Tree Level in a Multilayered Forest. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4190–4203. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Globally consistent registration of terrestrial laser scans via graph optimization. ISPRS J. Photogramm. Remote Sens. 2015, 109, 126–138. [Google Scholar] [CrossRef]
- Yan, L.; Tan, J.; Liu, H.; Xie, H.; Chen, C. Automatic registration of TLS-TLS and TLS-MLS point clouds using a genetic algorithm. Sensors 2017, 17, 1979. [Google Scholar] [CrossRef] [Green Version]
- Hilker, T.; Coops, N.C.; Newnham, G.J.; van Leeuwen, M.; Wulder, M.A.; Stewart, J.; Culvenor, D.S. Comparison of terrestrial and airborne LiDAR in describing stand structure of a thinned lodgepole pine forest. J. For. 2012, 110, 97–104. [Google Scholar] [CrossRef]
- Potapov, P.; Li, X.; Hernandez-Serna, A.; Tyukavina, A.; Hansen, M.C.; Kommareddy, A.; Pickens, A.; Turubanova, S.; Tang, H.; Silva, C.E.; et al. Mapping global forest canopy height through integration of GEDI and Landsat data. Remote Sens. Environ. 2021, 253, 112165. [Google Scholar] [CrossRef]
- Zhao, D.; Pang, Y.; Li, Z.; Liu, L. Isolating individual trees in a closed coniferous forest using small footprint lidar data. Int. J. Remote Sens. 2014, 35, 7199–7218. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S. Hierarchical Watershed Segmentation of Canopy Height Model for Multi-Scale Forest Inventory. In Proceedings of the ISPRS Workshop on Laser Scanning, Espoo, Finland, 12–14 September 2007; Volume XXXVI, pp. 436–441. [Google Scholar]
- Yu, X.; Kukko, A.; Kaartinen, H.; Wang, Y.; Liang, X.; Matikainen, L.; Hyyppä, J. Comparing features of single and multi-photon lidar in boreal forests. ISPRS J. Photogramm. Remote Sens. 2020, 168, 268–276. [Google Scholar] [CrossRef]
- LaRue, E.A.; Wagner, F.W.; Fei, S.; Atkins, J.W.; Fahey, R.T.; Gough, C.M.; Hardiman, B.S. Compatibility of aerial and terrestrial LiDAR for quantifying forest structural diversity. Remote Sens. 2020, 12, 1407. [Google Scholar] [CrossRef]
- Pyörälä, J.; Saarinen, N.; Kankare, V.; Coops, N.C.; Liang, X.; Wang, Y.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Variability of wood properties using airborne and terrestrial laser scanning. Remote Sens. Environ. 2019, 235, 111474. [Google Scholar] [CrossRef]
- Crespo-Peremarch, P.; Fournier, R.A.; Nguyen, V.T.; van Lier, O.R.; Ruiz, L.Á. A comparative assessment of the vertical distribution of forest components using full-waveform airborne, discrete airborne and discrete terrestrial laser scanning data. For. Ecol. Manag. 2020, 473, 118268. [Google Scholar] [CrossRef]
- Babbel, B.J.; Olsen, M.J.; Che, E.; Leshchinsky, B.A.; Simpson, C.; Dafni, J. Evaluation of uncrewed aircraft systems’ LiDAR data quality. ISPRS Int. J. Geo-Inf. 2019, 8, 532. [Google Scholar] [CrossRef] [Green Version]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef]
- Morsdorf, F.; Eck, C.; Zgraggen, C.; Imbach, B.; Schneider, F.D.; Kükenbrink, D. UAV-based LiDAR acquisition for the derivation of high-resolution forest and ground information. Lead. Edge 2017, 36, 566–570. [Google Scholar] [CrossRef]
- Hyyppä, E.; Yu, X.; Kaartinen, H.; Hakala, T.; Kukko, A.; Vastaranta, M.; Hyyppä, J. Comparison of backpack, handheld, under-canopy UAV, and above-canopy UAV laser scanning for field reference data collection in boreal forests. Remote Sens. 2020, 12, 3327. [Google Scholar] [CrossRef]
- Zhao, K.; Suarez, J.C.; Garcia, M.; Hu, T.; Wang, C.; Londo, A. Utility of multitemporal lidar for forest and carbon monitoring: Tree growth, biomass dynamics, and carbon flux. Remote Sens. Environ. 2018, 204, 883–897. [Google Scholar] [CrossRef]
- McCarley, T.R.; Kolden, C.A.; Vaillant, N.M.; Hudak, A.T.; Smith, A.M.S.; Wing, B.M.; Kellogg, B.S.; Kreitler, J. Multi-temporal LiDAR and Landsat quantification of fire-induced changes to forest structure. Remote Sens. Environ. 2017, 191, 419–432. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Wang, T.; Skidmore, A.K.; Heurich, M. Improving LiDAR-based tree species mapping in Central European mixed forests using multi-temporal digital aerial colour-infrared photographs. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101970. [Google Scholar] [CrossRef]
- VeriDaaS Geiger-Mode LiDAR. Available online: https://veridaas.com/geiger-mode-lidar/ (accessed on 24 November 2021).
- Clifton, W.E.; Steele, B.; Nelson, G.; Truscott, A.; Itzler, M.; Entwistle, M. Medium altitude airborne Geiger-mode mapping LIDAR system. In Proceedings of the Laser Radar Technology and Applications XX; and Atmospheric Propagation XII, Baltimore, MD, USA, 19 May 2015; Volume 9465, p. 946506. [Google Scholar] [CrossRef]
- Ullrich, A.; Pfennigbauer, M. Linear LIDAR versus Geiger-mode LIDAR: Impact on data properties and data quality. In Proceedings of the Laser Radar Technology and Applications XXI, Baltimore, MD, USA, 13 May 2016; Volume 9832, p. 983204. [Google Scholar] [CrossRef]
- Stoker, J.M.; Abdullah, Q.A.; Nayegandhi, A.; Winehouse, J. Evaluation of single photon and Geiger mode lidar for the 3D Elevation Program. Remote Sens. 2016, 8, 767. [Google Scholar] [CrossRef] [Green Version]
- Velodyne Puck Hi-Res Datasheet. Available online: https://velodynelidar.com/products/puck-hi-res/ (accessed on 26 May 2021).
- Velodyne Ultra Puck Datasheet. Available online: https://velodynelidar.com/products/ultra-puck/ (accessed on 26 May 2021).
- Applanix APX-15 Datasheet. Available online: https://www.applanix.com/products/dg-uavs.htm (accessed on 26 April 2020).
- Novatel SPAN-CPT. Available online: https://novatel.com/support/previous-generation-products-drop-down/previous-generation-products/span-cpt (accessed on 26 May 2021).
- Ravi, R.; Lin, Y.J.; Elbahnasawy, M.; Shamseldin, T.; Habib, A. Simultaneous System Calibration of a Multi-LiDAR Multicamera Mobile Mapping Platform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1694–1714. [Google Scholar] [CrossRef]
- Habib, A.; Lay, J.; Wong, C. LIDAR Error Propagation Calculator. Available online: https://engineering.purdue.edu/CE/Academics/Groups/Geomatics/DPRG/files/LIDARErrorPropagation.zip (accessed on 10 October 2021).
- USGS 3DEP LidarExplorer. Available online: https://prd-tnm.s3.amazonaws.com/LidarExplorer/index.html#/ (accessed on 24 November 2021).
- U.S. Geological Survey, 2021, USGS Lidar Point Cloud IN_Indiana_Statewide_LiDAR_2017_B17 in2018_29651890_12: U.S. Geological Survey. Available online: https://rockyweb.usgs.gov/vdelivery/Datasets/Staged/Elevation/LPC/Projects/IN_Indiana_Statewide_LiDAR_2017_B17/IN_Statewide_Opt2_B2_2017/LAZ/USGS_LPC_IN_Indiana_Statewide_LiDAR_2017_B17_in2018_29651890_12.laz (accessed on 24 November 2021).
- USGS Lidar Base Specification Online. Available online: https://www.usgs.gov/core-science-systems/ngp/ss/lidar-base-specification-online (accessed on 24 November 2021).
- Polewski, P.; Yao, W.; Cao, L.; Gao, S. Marker-free coregistration of UAV and backpack LiDAR point clouds in forested areas. ISPRS J. Photogramm. Remote Sens. 2019, 147, 307–318. [Google Scholar] [CrossRef]
- Lin, Y.; Manish, R.; Bullock, D.; Habib, A. Comparative Analysis of Different Mobile LiDAR Mapping Systems for Ditch Line Characterization. Remote Sens. 2021, 13, 2485. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Lin, Y.C.; Habib, A. Quality control and crop characterization framework for multi-temporal UAV LiDAR data over mechanized agricultural fields. Remote Sens. Environ. 2021, 256, 112299. [Google Scholar] [CrossRef]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3D Point cloud based object maps for household environments. Rob. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Backpack | |
|---|---|---|
| LiDAR sensors | Velodyne VLP-32C | Velodyne VLP-16 High-Res |
| Sensor weight | 0.925 kg | 0.830 kg |
| No. of channels | 32 | 16 |
| Pulse repetition rate | 600,000 point/s (single return) | 300,000 point/s (single return) |
| Maximum range | 200 m | 100 m |
| Range accuracy | 3 cm | 3 cm |
| GNSS/INS sensors | Applanix APX15v3 | NovAtel SPAN-CPT |
| Sensor weight | 0.06 kg | 2.28 kg |
| Positional accuracy | 2–5 cm | 1–2 cm |
| Attitude accuracy (roll/pitch) | 0.025° | 0.015° |
| Attitude accuracy (heading) | 0.08° | 0.03° |
| Expected accuracy at 50 m (sensor-to-object distance) | 5–6 cm | 3–4 cm |
| Dataset | Number of Points (Million) | Ground Point Percentage (%) | Above-Ground Point Percentage (%) |
|---|---|---|---|
| USGS-3DEP (leaf-off) | 0.06 | 83 | 17 |
| VeriDaaS (leaf-on) | 3 | 5 | 95 |
| UAV leaf-off | 79 | 87 | 13 |
| UAV leaf-on | 56 | 4 | 96 |
| Backpack leaf-off | 873 | 57 | 43 |
| Backpack leaf-on | 583 | 38 | 62 |
| Dataset | Point Density (ppsm) | |||
|---|---|---|---|---|
| 25th Percentage | Median | 75th Percentage | ||
| Entire point cloud | USGS-3DEP (leaf-off) | 3 | 4 | 5 |
| VeriDaaS (leaf-on) | 210 | 248 | 284 | |
| UAV leaf-off | 3963 | 5265 | 6283 | |
| UAV leaf-on | 2498 | 3837 | 5156 | |
| Backpack leaf-off | 44,487 | 54,559 | 65,603 | |
| Backpack leaf-on | 28,821 | 38,472 | 47,347 | |
| Bare earth point cloud | USGS-3DEP (leaf-off) | 3 | 4 | 4 |
| VeriDaaS (leaf-on) | 3 | 9 | 28 | |
| UAV leaf-off | 3525 | 4498 | 5491 | |
| UAV leaf-on | 21 | 45 | 113 | |
| Backpack leaf-off | 28,058 | 34,646 | 41,627 | |
| Backpack leaf-on | 9679 | 15,430 | 20,613 | |
| ID | Reference Data | Source Data | Number of Observations | (m) | (m) | |
|---|---|---|---|---|---|---|
| Parameter | Std. Dev. | |||||
| A | UAV leaf-off | USGS-3DEP | 3888 | 0.015 | −0.029 | 2.39 × 10−4 |
| B | UAV leaf-on | VeriDaaS | 2946 | 0.075 | −0.015 | 1.39 × 10−3 |
| C | UAV leaf-off | UAV leaf-on | 10,466 | 0.065 | 0.084 | 6.45 × 10−4 |
| D | UAV leaf-off | Backpack leaf-off | 15,894 | 0.016 | −0.001 | 1.25 × 10−4 |
| E | UAV leaf-off | Backpack leaf-on | 14,601 | 0.028 | 0.025 | 2.33 × 10−4 |
| ID | Reference Data | Source Data | Number of Observations | (m) | (m) | |
|---|---|---|---|---|---|---|
| Parameter | Std. Dev. | |||||
| A | UAV leaf-off | USGS-3DEP | 22 | 0.133 | 0.041 | 0.028 |
| B | UAV leaf-on | VeriDaaS | 22 | 0.151 | −0.150 | 0.034 |
| C | UAV leaf-off | UAV leaf-on | 22 | 0.218 | 0.050 | 0.047 |
| D | UAV leaf-off | Backpack leaf-off | 22 | 0.054 | −0.009 | 0.011 |
| E | UAV leaf-off | Backpack leaf-on | 22 | 0.055 | −0.010 | 0.012 |
| ID | Reference Data | Source Data | Number of Observations | (m) | (m) | (m) | ||
|---|---|---|---|---|---|---|---|---|
| Parameter | Std. Dev. | Parameter | Std. Dev. | |||||
| B | UAV leaf-on | VeriDaaS | 732 | 0.215 | −0.138 | 0.008 | 0.026 | 0.008 |
| C | UAV leaf-off | UAV leaf-on | 759 | 0.345 | −0.009 | 0.013 | 0.051 | 0.013 |
| D | UAV leaf-off | Backpack leaf-off | 994 | 0.128 | 0.028 | 0.004 | 0.065 | 0.004 |
| E | UAV leaf-off | Backpack leaf-on | 914 | 0.150 | 0.028 | 0.005 | 0.072 | 0.005 |
| VeriDaaS | UAV Leaf-Off | UAV Leaf-On | Backpack Leaf-Off | Backpack Leaf-On | |
|---|---|---|---|---|---|
| Approach | Top-down | Bottom-up | Top-down | Bottom-up | Bottom-up |
| Number of trees | 1080 | 1080 | 1080 | 1080 | 1080 |
| True positive | 730 | 1056 | 764 | 1014 | 932 |
| False positive | 105 | 0 | 86 | 1 | 32 |
| False negative | 350 | 24 | 316 | 66 | 146 |
| Precision | 0.87 | 1.00 | 0.90 | 1.00 | 0.97 |
| Recall | 0.68 | 0.98 | 0.71 | 0.94 | 0.86 |
| F1 score | 0.76 | 0.99 | 0.79 | 0.97 | 0.91 |
| ID | Reference Data | Source Data | Number of Trees | Height Difference | ||
|---|---|---|---|---|---|---|
| Mean (m) | Std. Dev. (m) | RMSE (m) | ||||
| A | UAV leaf-off | USGS-3DEP | 1056 | −4.95 | 2.04 | 5.35 |
| B | UAV leaf-on | VeriDaaS | 1056 | −0.17 | 0.23 | 0.29 |
| C | UAV leaf-off | UAV leaf-on | 1052 | 0.48 | 0.30 | 0.57 |
| D | UAV leaf-off | Backpack leaf-off | 1056 | 0.06 | 0.20 | 0.21 |
| E | UAV leaf-off | Backpack leaf-on | 1050 | −0.33 | 0.80 | 0.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.-C.; Shao, J.; Shin, S.-Y.; Saka, Z.; Joseph, M.; Manish, R.; Fei, S.; Habib, A. Comparative Analysis of Multi-Platform, Multi-Resolution, Multi-Temporal LiDAR Data for Forest Inventory. Remote Sens. 2022, 14, 649. https://doi.org/10.3390/rs14030649
Lin Y-C, Shao J, Shin S-Y, Saka Z, Joseph M, Manish R, Fei S, Habib A. Comparative Analysis of Multi-Platform, Multi-Resolution, Multi-Temporal LiDAR Data for Forest Inventory. Remote Sensing. 2022; 14(3):649. https://doi.org/10.3390/rs14030649
Chicago/Turabian StyleLin, Yi-Chun, Jinyuan Shao, Sang-Yeop Shin, Zainab Saka, Mina Joseph, Raja Manish, Songlin Fei, and Ayman Habib. 2022. "Comparative Analysis of Multi-Platform, Multi-Resolution, Multi-Temporal LiDAR Data for Forest Inventory" Remote Sensing 14, no. 3: 649. https://doi.org/10.3390/rs14030649
APA StyleLin, Y. -C., Shao, J., Shin, S. -Y., Saka, Z., Joseph, M., Manish, R., Fei, S., & Habib, A. (2022). Comparative Analysis of Multi-Platform, Multi-Resolution, Multi-Temporal LiDAR Data for Forest Inventory. Remote Sensing, 14(3), 649. https://doi.org/10.3390/rs14030649