
Deterioration Mapping of RC Bridge Elements Based on Automated Analysis of GPR Images



Abstract
:
1. Introduction
2. Objectives of Research
- A review of the GPR scanning procedure and its data interpretation methods including the widely used amplitude-based approach.
- An overview of IBA, its advantages, and current limitations.
- A summary of the Viola–Jones Algorithm for hyperbola detections.
- Develop a new model to generate a deterioration map based on automated detections, textural factors, and clustering.
- Comparison of maps generated by the developed model with two existing approaches using a RC slab case study.
3. Research Background
3.1. GPR Data Analysis
3.2. Visual Image-Based Analysis
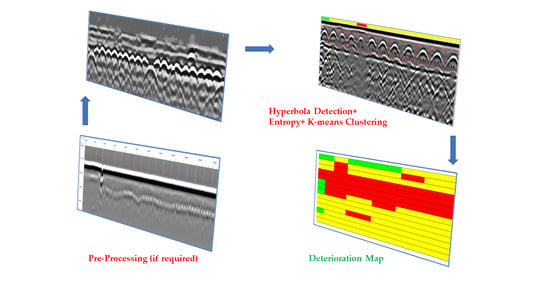
4. Methodology
4.1. Pre-Process GPR Profiles
4.2. Hyperbola Detections
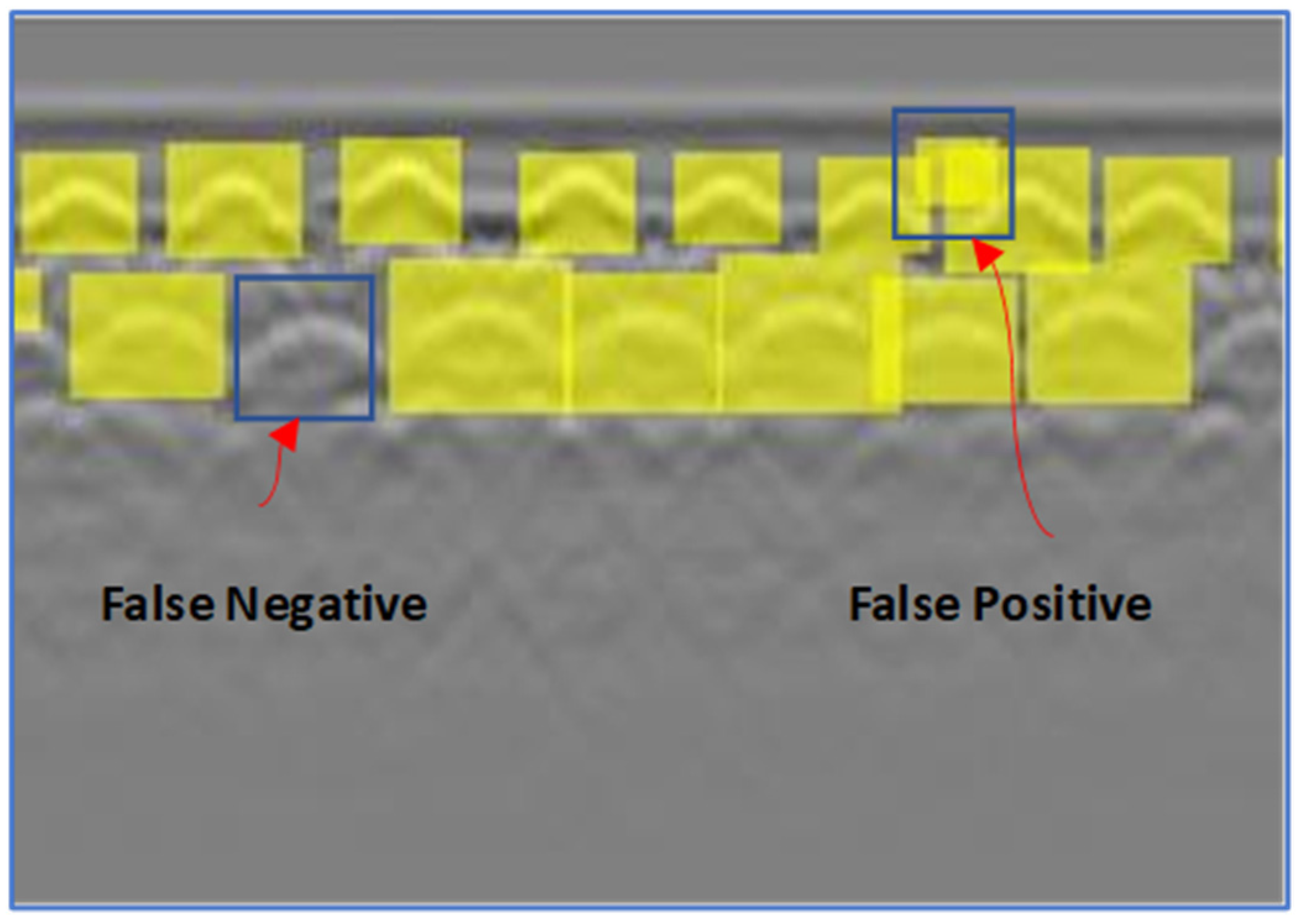
- The detections (true or false) which do not lie across the top layer and bottom layer (if present) are considered as false positives and eliminated due to their regional position in the B-Scan. The developed code [7] automatically identifies the top layer, but in some cases it yields erroneous results due to complex hyperbolic signatures and/or heavily disoriented top layer in GPR profiles. Therefore, the proposed model utilizes a user-interactive approach to prompt the user to verify if the necessary layer has been identified correctly. In case of incorrect detection, the user is prompted again to roughly mark the top and bottom limit of the top layer present in the GPR profile. Identification of top layer is extremely crucial in generating reliable maps, and thus, a user-interactive approach has been adopted in this step.
- The actual false positives among overlapping detections are identified and subsequently eliminated along the top/bottom layers by comparing them with the average size and location of neighboring non-overlapping true positives automatically.
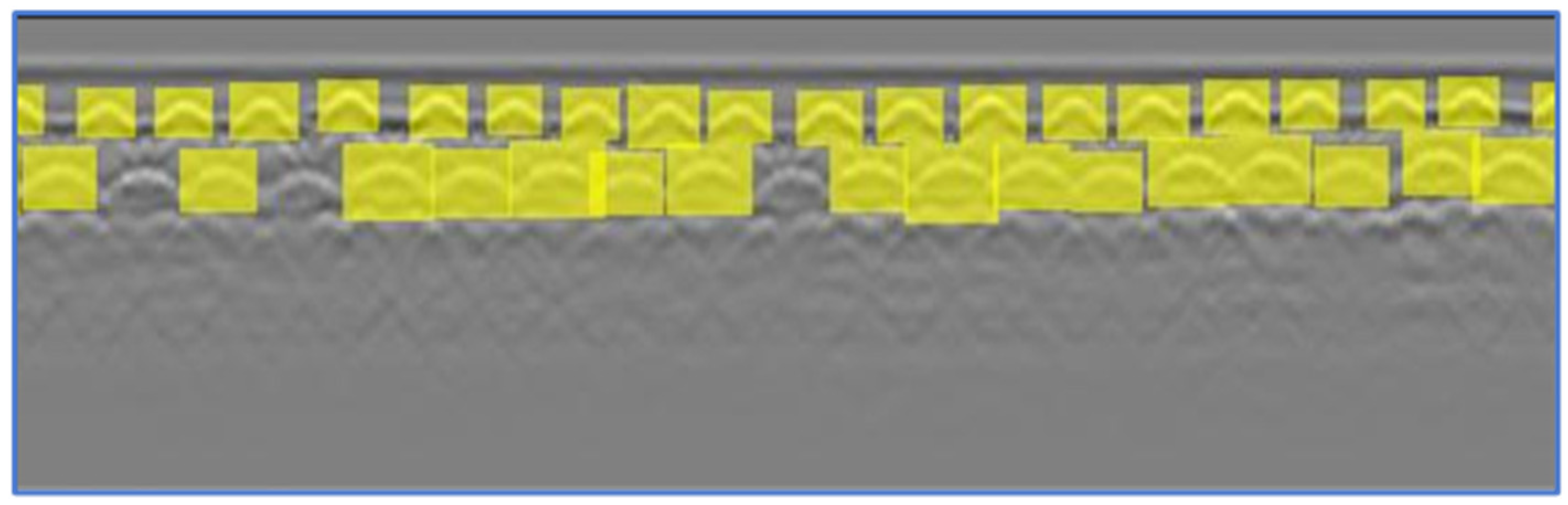
- The missing gaps present across the top/bottom layers could be either of the following: (a) false negatives, (b) zones with highly distorted hyperbolas or (c) zones with no hyperbolas; probably undetected due to deterioration. These are bounded by rectangular boxes automatically to align with the neighboring true positive detections. Figure 7 shows a cut-out from a GPR profile with three missing detections or gaps after applying a custom classifier. Figure 8 shows the same sample after filling missing gaps in rectangular boxes across both layers. The detections of the GPR profiles are complete and ready for the next step of evaluating textural factors after bounding the top layer and bottom layer (if present) with rectangular boxes composing of true positive detections and missing gaps which include false negatives.
4.3. Deterioration Mapping
- Initially, assign K-partitions randomly or based on some prior information. The centroid means matrix can be written as: M = {µk, k = 1, 2, …, K};
- Each data point in the data set X is assigned to its nearest clusters cω such that: ; < ; i = 1, 2, …, n; ; k = 1, 2, …, K;
- The centroid matrix M is recalculated based on the current partition set, C;
- Repeat steps 2–3 until no change is observed in each cluster.
5. Case Study
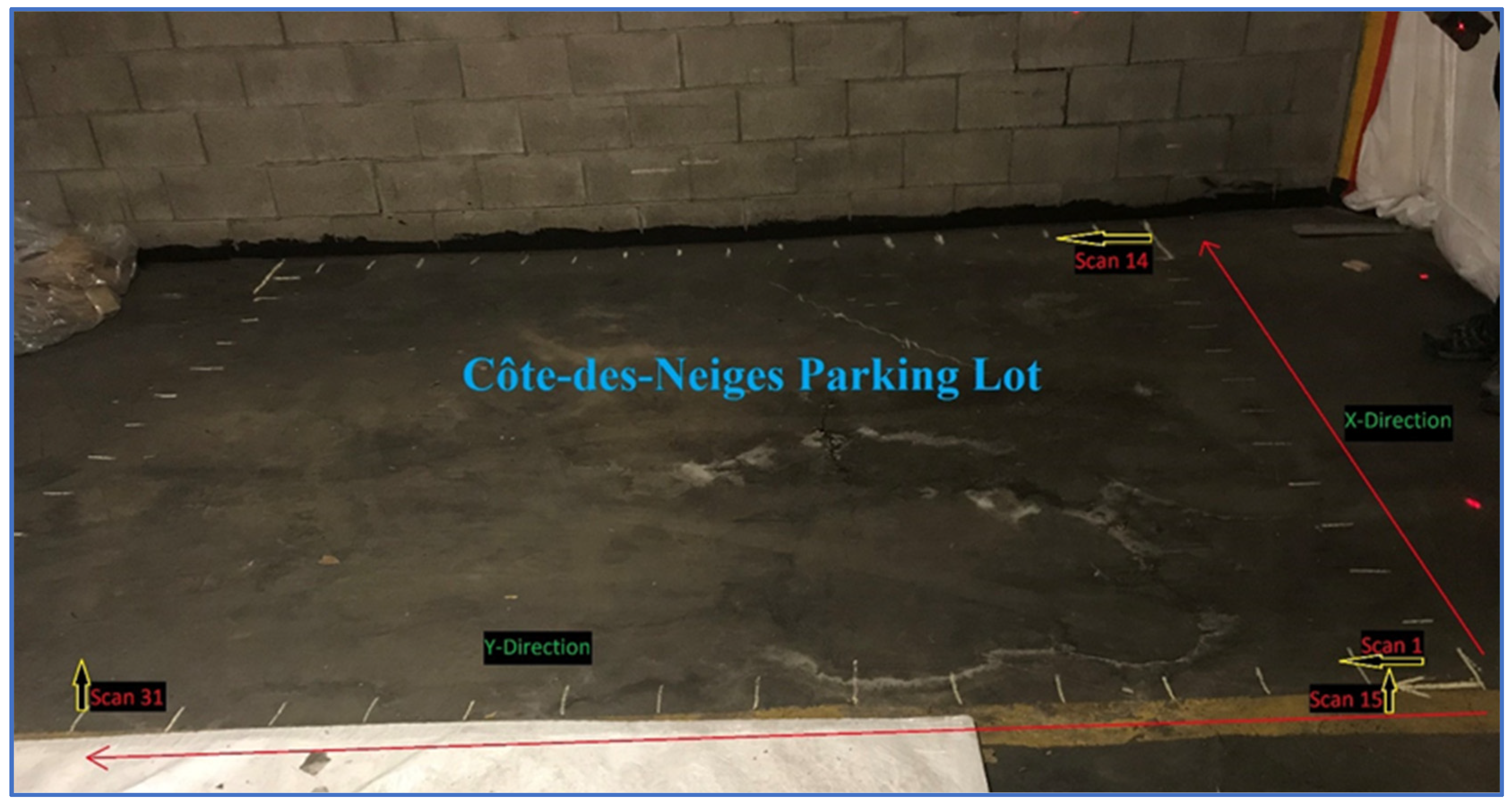
5.1. Data Collection
5.2. Data Processing
5.3. Results and Their Discussion
6. Conclusions and Future Work
- Pre-processing of GPR profiles is necessary to improve the detection rate of hyperbolas, especially maintaining an aspect ratio closer to the trained classifier.
- Most hyperbolas are detected in B-scans based on a classifier trained on a complete real bridge-deck data using Viola–Jones Algorithm. The remaining missing hyperbolas and regions are enclosed in boxes across the top/bottom layer of reinforcement automatically with a user-interactive approach based on regional comparison and statistical analysis.
- A statistical textural factor, entropy, has been evaluated to differentiate detected regions closely equivalent to the human visual system.
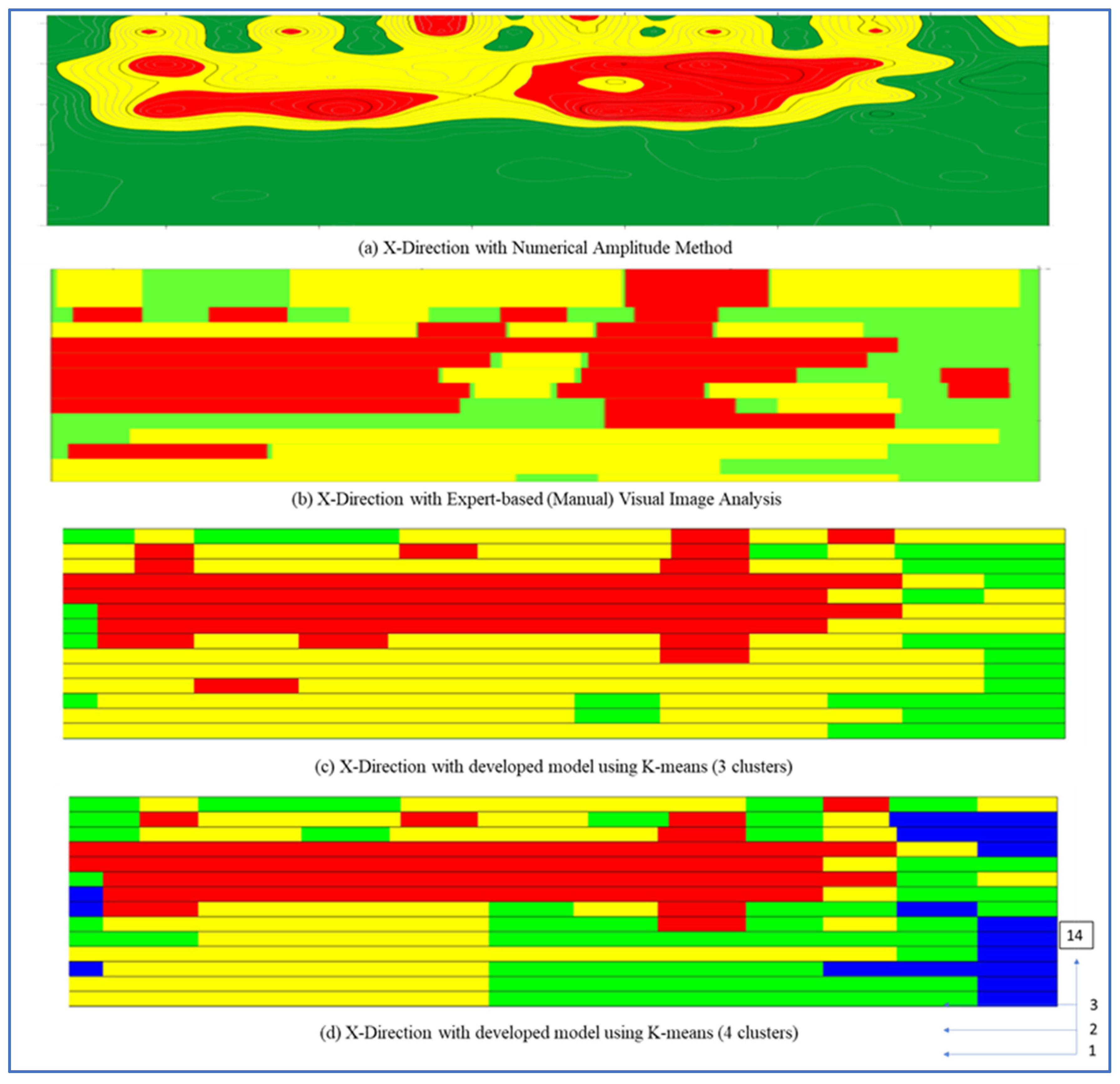
- The entropy values are clustered into three or four zones using K-means clustering. A deterioration scale is developed for all B-scans by assigning a color code to each of the detected regions relative to the zone in which they were clustered. These scales are subsequently stacked together to generate a deterioration map.
- A comparison of the deterioration map of a parking lot case study shows considerable correspondence of the developed model with existing approaches, especially with the visual image-based analysis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Heymsfield, E.; Kuss, M.L. Supplementing Current Visual Highway Bridge Inspections with Gigapixel Technology. J. Perform. Constr. Facil. 2016, 30, 04015015. [Google Scholar] [CrossRef]
- Gucunski, N. ; National Research Council. Nondestructive Testing to Identify Concrete Bridge Deck Deterioration; Transportation Research Board: Washington, DC, USA, 2013. [Google Scholar]
- Yehia, S.; Abudayyeh, O.; Nabulsi, S.; Abdelqader, I. Detection of Common Defects in Concrete Bridge Decks Using Nondestructive Evaluation Techniques. J. Bridg. Eng. 2007, 12, 215–225. [Google Scholar] [CrossRef]
- ASTM D6087; Standard Test Method for Evaluating Asphalt-Covered Concrete Bridge Decks Using Ground Penetrating Radar. American Society for Testing and Materials: West Conshohocken, PA, USA, 2015; p. D6087-08.
- Tarussov, A.; Vandry, M.; De La Haza, A. Condition assessment of concrete structures using a new analysis method: Ground-penetrating radar computer-assisted visual interpretation. Constr. Build. Mater. 2013, 38, 1246–1254. [Google Scholar] [CrossRef]
- Rahman, M.A.; Zayed, T. Developing Corrosion Maps of RC bridge elements based on automated visual image analysis. In Proceedings of the Session of the 2016 Conference of the Transportation Association of Canada, Toronto, ON, Canada, 22–28 September 2016. [Google Scholar]
- Rahman, M.A.; Zayed, T. Viola-Jones Algorithm for Automatic Detection of Hyperbolic Regions in GPR Profiles of Bridge Decks. In Proceedings of the 2018 IEEE Southwest Symposium on Image Analysis and Interpretation (SSIAI), Las Vegas, NV, USA, 8–10 April 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Varnavina, A.V.; Khamzin, A.K.; Torgashov, E.V.; Sneed, L.H.; Goodwin, B.T.; Anderson, N.L. Data acquisition and processing parameters for concrete bridge deck condition assessment using ground-coupled ground penetrating radar: Some considerations. J. Appl. Geophys. 2015, 114, 123–133. [Google Scholar] [CrossRef]
- Gehrig, M.D.; Morris, D.V.; Bryant, J.T. Ground penetrating radar for concrete evaluation studies. Tech. Present. Pap. Perform. Found. Assoc. 2004, 197–200. [Google Scholar]
- Dinh, K.; Zayed, T.; Romero, F.; Tarussov, A. Method for Analyzing Time-Series GPR Data of Concrete Bridge Decks. J. Bridg. Eng. 2015, 20, 04014086. [Google Scholar] [CrossRef]
- Clemena, G.G. Nondestructive Inspection of Overlaid Bridge Decks with Ground-Penetrating Radar; Transportation Research Board: Washington, DC, USA, 1983; pp. 21–32, No. 899. [Google Scholar]
- Carter, C.R.; Chung, T.; Holt, F.B.; Manning, D.G. An automated signal processing system for the signature analysis of radar waveforms from bridge decks. Can. Electr. Eng. J. 1986, 11, 128–137. [Google Scholar] [CrossRef]
- Chung, T.; Carter, C.R.; Reel, R.; Tharmabala, T.; Wood, D. Impulse radar signatures of selected bridge deck structures. In Proceedings of the Canadian Conference on Electrical and Computer Engineering, Vancouver, BC, Canada, 14–17 September 1993; pp. 59–62. [Google Scholar] [CrossRef]
- Maser, K.R. New Technology for Bridge Deck Assessment, Phase II Report; Report No FHWA-NETC-90-01; Centre for Transportation Studies, Massachusetts Institute of Technology: Cambridge, MA USA, 1990. [Google Scholar]
- Maser, K.; Bernhardt, M. Statewide Bridge Deck Survey using Ground Penetrating Radar. In Proceedings of the Structural Materials Technology IV—An NDT Conference, Atlantic City, NJ, USA, 28 February–3 March 2000. [Google Scholar]
- Romero, F.A.; Roberts, G.E.; Roberts, R.L. Evaluation of GPR Bridge Deck Survey Results used for Delineation of Removal/Maintenance Quantity Boundaries on Asphalt-Overlaid, Reinforced Concrete Deck. In Proceedings of the Structural Materials Technology IV—An NDT Conference, Atlantic City, NJ, USA, 28 February–3 March 2000. [Google Scholar]
- Barnes, C.L.; Trottier, J.-F. Effectiveness of Ground Penetrating Radar in Predicting Deck Repair Quantities. J. Infrastruct. Syst. 2004, 10, 69–76. [Google Scholar] [CrossRef]
- Parrillo, R.; Roberts, R.; Haggan, A. Bridge deck condition assessment using ground penetrating radar. Proc. ECNDT Berlin 2006, 2526, 112. [Google Scholar]
- Barnes, C.L.; Trottier, J.-F.; Forgeron, D. Improved concrete bridge deck evaluation using GPR by accounting for signal depth–amplitude effects. NDT E Int. 2008, 41, 427–433. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Kim, J.; Duong, T. Method for attenuation assessment of GPR data from concrete bridge decks. NDT E Int. 2017, 92, 50–58. [Google Scholar] [CrossRef]
- Sultan, A.A.; Washer, G.A. Reliability Analysis of Ground-Penetrating Radar for the Detection of Subsurface Delamination. J. Bridg. Eng. 2018, 23, 04017131. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Zayed, T. Automated visualization of concrete bridge deck condition from GPR data. NDT E Int. 2019, 102, 120–128. [Google Scholar] [CrossRef]
- Goulias, D.G.; Cafiso, S.; Di Graziano, A.; Saremi, S.G.; Currao, V. Condition Assessment of Bridge Decks through Ground-Penetrating Radar in Bridge Management Systems. J. Perform. Constr. Facil. 2020, 34, 04020100. [Google Scholar] [CrossRef]
- Gagarin, N.; Goulias, D.; Mekemson, J.; Cutts, R.; Andrews, J. Development of Novel Methodology for Assessing Bridge Deck Conditions Using Step Frequency Antenna Array Ground Penetrating Radar. J. Perform. Constr. Facil. 2020, 34, 04019113. [Google Scholar] [CrossRef]
- Jiao, L.; Ye, Q.; Cao, X.; Huston, D.; Xia, T. Identifying concrete structure defects in GPR image. Measurement 2020, 160, 107839. [Google Scholar] [CrossRef]
- Rhee, J.-Y.; Park, K.-E.; Lee, K.-H.; Kee, S.-H. A Practical Approach to Condition Assessment of Asphalt-Covered Concrete Bridge Decks on Korean Expressways by Dielectric Constant Measurements Using Air-Coupled GPR. Sensors 2020, 20, 2497. [Google Scholar] [CrossRef]
- Pashoutani, S.; Zhu, J. Ground Penetrating Radar Data Processing for Concrete Bridge Deck Evaluation. J. Bridg. Eng. 2020, 25, 04020030. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Tran, K.; Novo, A.; Nguyen, T. Full-resolution 3D imaging for concrete structures with dual-polarization GPR. Autom. Constr. 2021, 125, 103652. [Google Scholar] [CrossRef]
- Abouhamad, M.; Dawood, T.; Jabri, A.; Alsharqawi, M.; Zayed, T. Corrosiveness mapping of bridge decks using image-based analysis of GPR data. Autom. Constr. 2017, 80, 104–117. [Google Scholar] [CrossRef]
- Dawood, T.; Zhu, Z.; Zayed, T. Deterioration mapping in subway infrastructure using sensory data of GPR. Tunn. Undergr. Space Technol. 2020, 103, 103487. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. A survey of the hough transform. Comput. Vision, Graph. Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Falorni, P.; Capineri, L.; Masotti, L. 3-D radar imaging of buried utilities by features estimation of hyperbolic diffraction patterns in radar scans. Penetrating Radar 2004, 1, 403–406. [Google Scholar]
- Windsor, C.; Capineri, L.; Falorni, P.; Matucci, S.; Borgioli, G. The estimation of buried pipe diameters using ground penetrating radar. Insight-Non-Destructive Test. Cond. Monit. 2005, 47, 394–399. [Google Scholar] [CrossRef]
- Hui-Lin, Z.; Mao, T.; Xiao-Li, C. Feature extraction and classification of echo signal of ground penetrating radar. Wuhan Univ. J. Nat. Sci. 2005, 10, 1009–1012. [Google Scholar] [CrossRef]
- Dell’Acqua, A.; Sarti, A.; Tubaro, S.; Zanzi, L. Detection of linear objects in GPR data. Signal Process. 2004, 84, 785–799. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, M.; Cai, Q. The target detection for GPR images based on curve fitting. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; Volume 6, pp. 2876–2879. [Google Scholar]
- Mertens, L.; Persico, R.; Matera, L.; Lambot, S. Automated Detection of Reflection Hyperbolas in Complex GPR Images with No A Priori Knowledge on the Medium. IEEE Trans. Geosci. Remote Sens. 2016, 54, 580–596. [Google Scholar] [CrossRef]
- Al-Nuaimy, W.; Huang, Y.; Nakhkash, M.; Fang, M.; Nguyen, V.; Eriksen, A. Automatic detection of buried utilities and solid objects with GPR using neural networks and pattern recognition. J. Appl. Geophys. 2000, 43, 157–165. [Google Scholar] [CrossRef]
- Gamba, P.; Lossani, S. Neural detection of pipe signatures in ground penetrating radar images. IEEE Trans. Geosci. Remote Sens. 2000, 38, 790–797. [Google Scholar] [CrossRef]
- Singh, N.P.; Nene, M.J. Buried object detection and analysis of GPR images: Using neural network and curve fitting. In Proceedings of the 2013 Annual International Conference on Emerging Research Areas and 2013 International Conference on Microelectronics, Communications and Renewable Energy, Kanjirapally, India, 4–6 June 2013; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Pham, M.-T.; Lefèvre, S. Buried Object Detection from B-Scan Ground Penetrating Radar Data Using Faster-RCNN. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 6804–6807. [Google Scholar]
- Kaneko, T. Radar image processing for locating underground linear objects. IEICE Trans. Inf. Syst. 1991, 74, 3451–3458. [Google Scholar]
- Shihab, S.; Al-Nuaimy, W. Radius Estimation for Cylindrical Objects Detected by Ground Penetrating Radar. Subsurf. Sens. Technol. Appl. 2005, 6, 151–166. [Google Scholar] [CrossRef]
- Pasolli, E.; Melgani, F.; Donelli, M. Automatic Analysis of GPR Images: A Pattern-Recognition Approach. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2206–2217. [Google Scholar] [CrossRef]
- Delbo, S.; Gamba, P.; Roccato, D. A fuzzy shell clustering approach to recognize hyperbolic signatures in subsurface radar images. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1447–1451. [Google Scholar] [CrossRef]
- Harkat, H.; Ruano, A.; Ruano, M.; Bennani, S. Classifier Design by a Multi-Objective Genetic Algorithm Approach for GPR Automatic Target Detection. IFAC-PapersOnLine 2018, 51, 187–192. [Google Scholar] [CrossRef]
- Wang, Z.W.; Zhou, M.; Slabaugh, G.; Zhai, J.; Fang, T. Automatic Detection of Bridge Deck Condition From Ground Penetrating Radar Images. IEEE Trans. Autom. Sci. Eng. 2010, 8, 633–640. [Google Scholar] [CrossRef]
- Kaur, P.; Dana, K.J.; Romero, F.A.; Gucunski, N. Automated GPR Rebar Analysis for Robotic Bridge Deck Evaluation. IEEE Trans. Cybern. 2016, 46, 2265–2276. [Google Scholar] [CrossRef] [PubMed]
- Dou, Q.; Wei, L.; Magee, D.R.; Cohn, A.G. Real-Time Hyperbola Recognition and Fitting in GPR Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 51–62. [Google Scholar] [CrossRef] [Green Version]
- Yuan, C.; Li, S.; Cai, H.; Kamat, V.R. GPR Signature Detection and Decomposition for Mapping Buried Utilities with Complex Spatial Configuration. J. Comput. Civ. Eng. 2018, 32, 04018026. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Duong, T.H. An algorithm for automatic localization and detection of rebars from GPR data of concrete bridge decks. Autom. Constr. 2018, 89, 292–298. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, H.; Li, J. An Automatic GPR B-Scan Image Interpreting Model. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3398–3412. [Google Scholar] [CrossRef]
- Lei, W.; Hou, F.; Xi, J.; Tan, Q.; Xu, M.; Jiang, X.; Liu, G.; Gu, Q. Automatic hyperbola detection and fitting in GPR B-scan image. Autom. Constr. 2019, 106, 102839. [Google Scholar] [CrossRef]
- Ozkaya, U.; Melgani, F.; Bejiga, M.B.; Seyfi, L.; Donelli, M. GPR B scan image analysis with deep learning methods. Measurement 2020, 165, 107770. [Google Scholar] [CrossRef]
- Asadi, P.; Gindy, M.; Alvarez, M.; Asadi, A. A computer vision based rebar detection chain for automatic processing of concrete bridge deck GPR data. Autom. Constr. 2020, 112, 103106. [Google Scholar] [CrossRef]
- Hou, F.; Lei, W.; Li, S.; Xi, J.; Xu, M.; Luo, J. Improved Mask R-CNN with distance guided intersection over union for GPR signature detection and segmentation. Autom. Constr. 2021, 121, 103414. [Google Scholar] [CrossRef]
- Utsi, E.C. Ground Penetrating Radar: Theory and Practice; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar]
- Viola, P.; Jones, M.J. Robust Real-Time Face Detection. Int. J. Comput. Vis. 2004, 57, 137–154. [Google Scholar] [CrossRef]
- Wang, Y.-Q. An Analysis of the Viola-Jones Face Detection Algorithm. Image Process. Line 2014, 4, 128–148. [Google Scholar] [CrossRef]
- Chaudhari, M.; Sondur, S.; Vanjare, G. A review on Face Detection and study of Viola Jones method. Int. J. Comput. Trends Technol. 2015, 25, 54–61. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–26 June 2005; pp. 886–893. [Google Scholar]
- Dang, K.; Sharma, S. Review and comparison of face detection algorithms. In Proceedings of the 2017 7th International Conference on Cloud Computing, Data Science & Engineering-Confluence, Noida, India, 12–13 January 2017; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2017; pp. 629–633. [Google Scholar]
- Gupta, M.V.; Sharma, D. A study of various face detection methods. Int. J. Adv. Res. Comput. Commun. Eng. 2014, 3, 6694–6697. [Google Scholar]
- Freund, Y.; Schapire, R.E. A Decision-Theoretic Generalization of On-Line Learning and an Application to Boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Gucunski, N.; Romero, F.; Kruschwitz, S.; Feldmann, R.; Parvardeh, H. Comprehensive Bridge Deck Deterioration Mapping of nine Bridges by Nondestructive Evaluation Technologies; No. Project SPR-NDEB(90)- 8H-00; Iowa Department of Transportation: IA, USA, 2011.
- Tatu, A.; Bansal, S. A Novel Active Contour Model for Texture Segmentation BT—Energy Minimization Methods in Computer Vision and Pattern Recognition; Springer: Cham, Switzerland, 2015; pp. 223–236. [Google Scholar]
- Manjunath, B.S.; Ma, W.Y. Texture features for browsing and retrieval of image data. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 837–842. [Google Scholar] [CrossRef] [Green Version]
- Tamura, H.; Mori, S.; Yamawaki, T. Textural Features Corresponding to Visual Perception. IEEE Trans. Syst. Man Cybern. 1978, 8, 460–473. [Google Scholar] [CrossRef]
- Shapiro, L.G.; Stockman, G.C. Computer Vision; Prentice Hall: Hoboken, NJ, USA, 2001. [Google Scholar]
- Gonzalez, R.; Woods, R.; Eddins, S. Digital Image Processing Using MATLAB®; Tata McGraw Hill Education: New York, NY, USA, 2010. [Google Scholar]
- Everitt, B.; Landau, S.; Leese, M. Cluster Analysis. In A Hodder Arnold Publication; Willey: London, UK, 2001. [Google Scholar]
- Jain, A.K. Data clustering: 50 years beyond K-means. Pattern Recognit. Lett. 2010, 31, 651–666. [Google Scholar] [CrossRef]
- Xu, R.; Wunsch, D. Survey of Clustering Algorithms. IEEE Trans. Neural Netw. 2005, 16, 645–678. [Google Scholar] [CrossRef] [Green Version]
- Ghodoosi, F.; Bagchi, A.; Zayed, T.; Hosseini, M.R. Method for developing and updating deterioration models for concrete bridge decks using GPR data. Autom. Constr. 2018, 91, 133–141. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Map-Direction | Zone | Color (Entropy Values) | |||
|---|---|---|---|---|---|
| Blue | Green | Yellow | Red | ||
| X-direction | 3 Clusters | - | 7.21–6.28 | 6.28–5.44 | 5.44–4.27 |
| 4 Clusters | 7.21–6.34 | 6.34–5.76 | 5.76–5.16 | 5.16–4.27 | |
| Y-direction | 3 Clusters | - | 20.86–11.28 | 11.28–5.94 | 5.94–2.22 |
| 4 Clusters | 20.86–14.49 | 14.49–9.92 | 9.92–5.56 | 5.56–2.22 | |
| Map-Direction | Type of Analysis | Percentage of Color Distribution in Maps | ||
|---|---|---|---|---|
| Green (Good) | Yellow (Moderate) | Red (Bad) | ||
| X-direction | (a) Amplitude-based | 59.6 | 25.7 | 14.7 |
| (b) Visual-IBA | 22.1 | 44.5 | 33.4 | |
| (c) Developed model (3 clusters) | 15.7 | 54.7 | 29.6 | |
| Y-direction | (a) Amplitude-based | 22.6 | 41.7 | 35.7 |
| (b) Visual-IBA | 46.1 | 15.1 | 38.7 | |
| (c) Developed model (3 clusters) | 18.2 | 35.9 | 45.9 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdul Rahman, M.; Zayed, T.; Bagchi, A. Deterioration Mapping of RC Bridge Elements Based on Automated Analysis of GPR Images. Remote Sens. 2022, 14, 1131. https://doi.org/10.3390/rs14051131
Abdul Rahman M, Zayed T, Bagchi A. Deterioration Mapping of RC Bridge Elements Based on Automated Analysis of GPR Images. Remote Sensing. 2022; 14(5):1131. https://doi.org/10.3390/rs14051131
Chicago/Turabian StyleAbdul Rahman, Mohammed, Tarek Zayed, and Ashutosh Bagchi. 2022. "Deterioration Mapping of RC Bridge Elements Based on Automated Analysis of GPR Images" Remote Sensing 14, no. 5: 1131. https://doi.org/10.3390/rs14051131
APA StyleAbdul Rahman, M., Zayed, T., & Bagchi, A. (2022). Deterioration Mapping of RC Bridge Elements Based on Automated Analysis of GPR Images. Remote Sensing, 14(5), 1131. https://doi.org/10.3390/rs14051131