
Modelling and Assessment of Single-Frequency PPP Time Transfer with BDS-3 B1I and B1C Observations




Abstract
:
1. Introduction
2. Methods
2.1. Observations
2.2. SF1
2.3. SF2
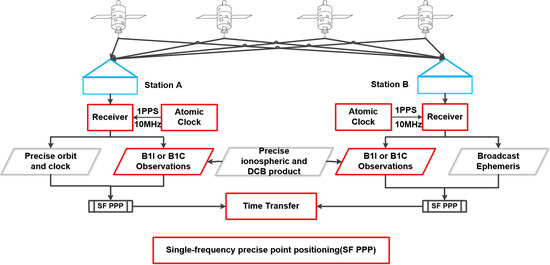
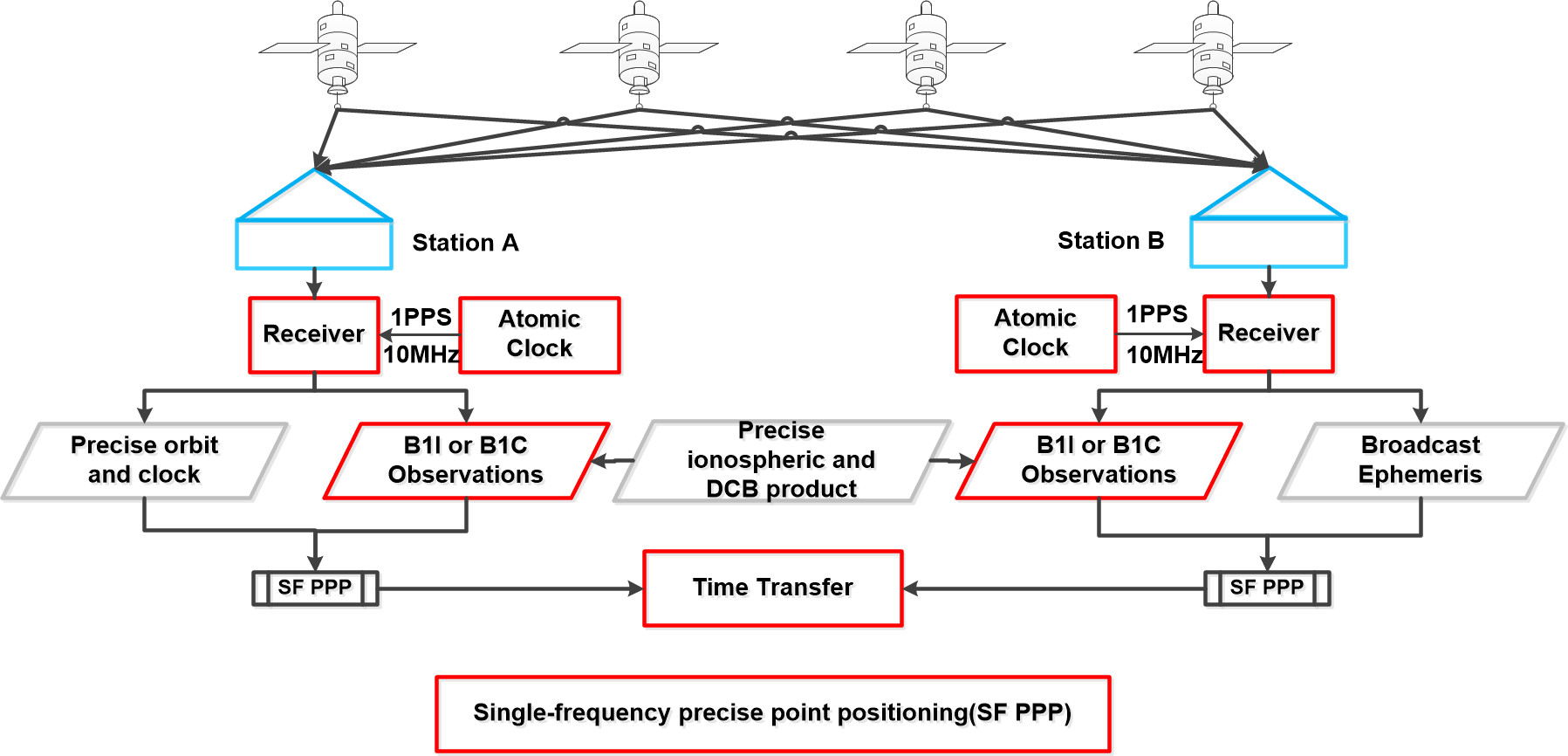
2.4. Time Transfer
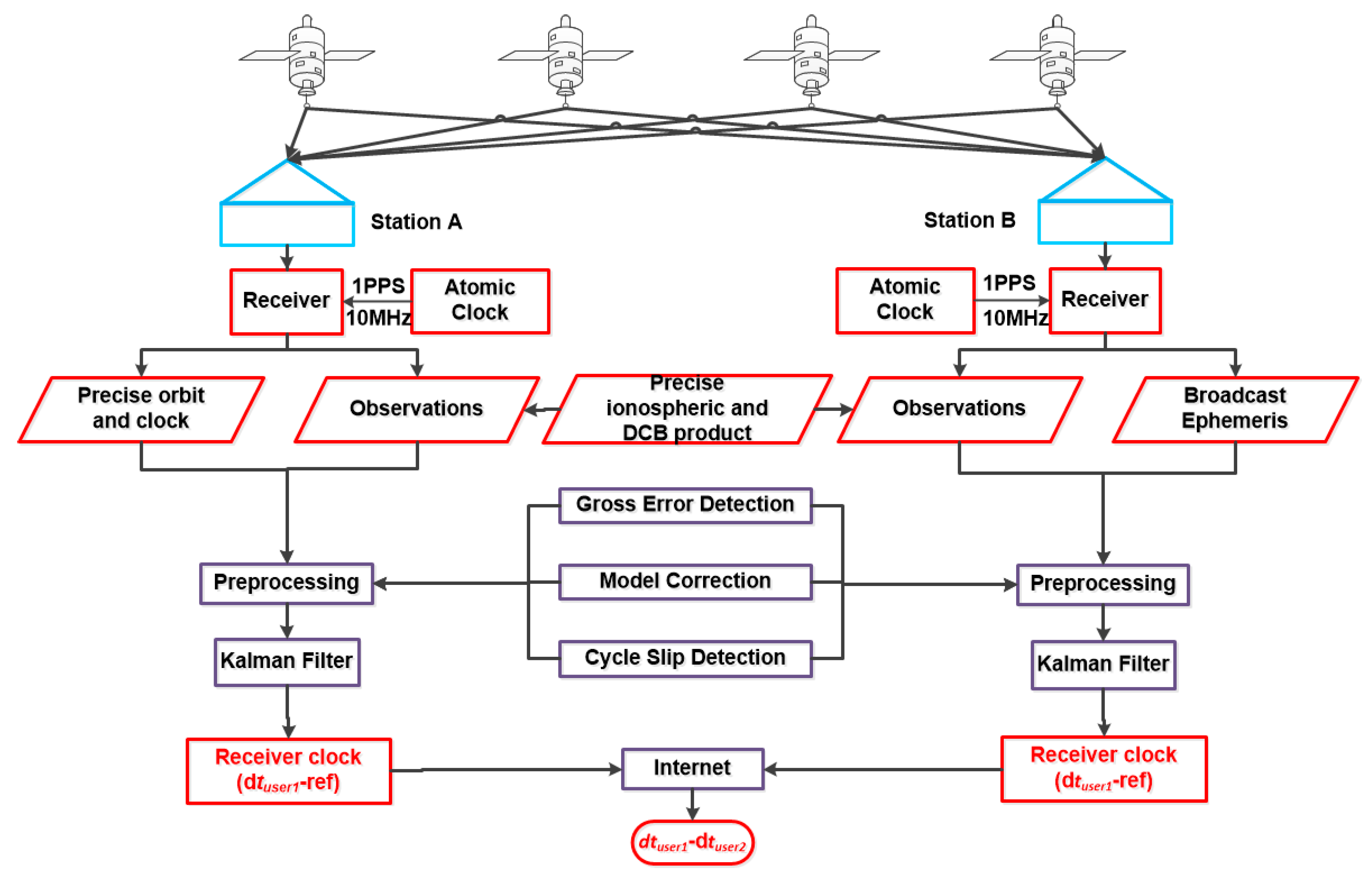
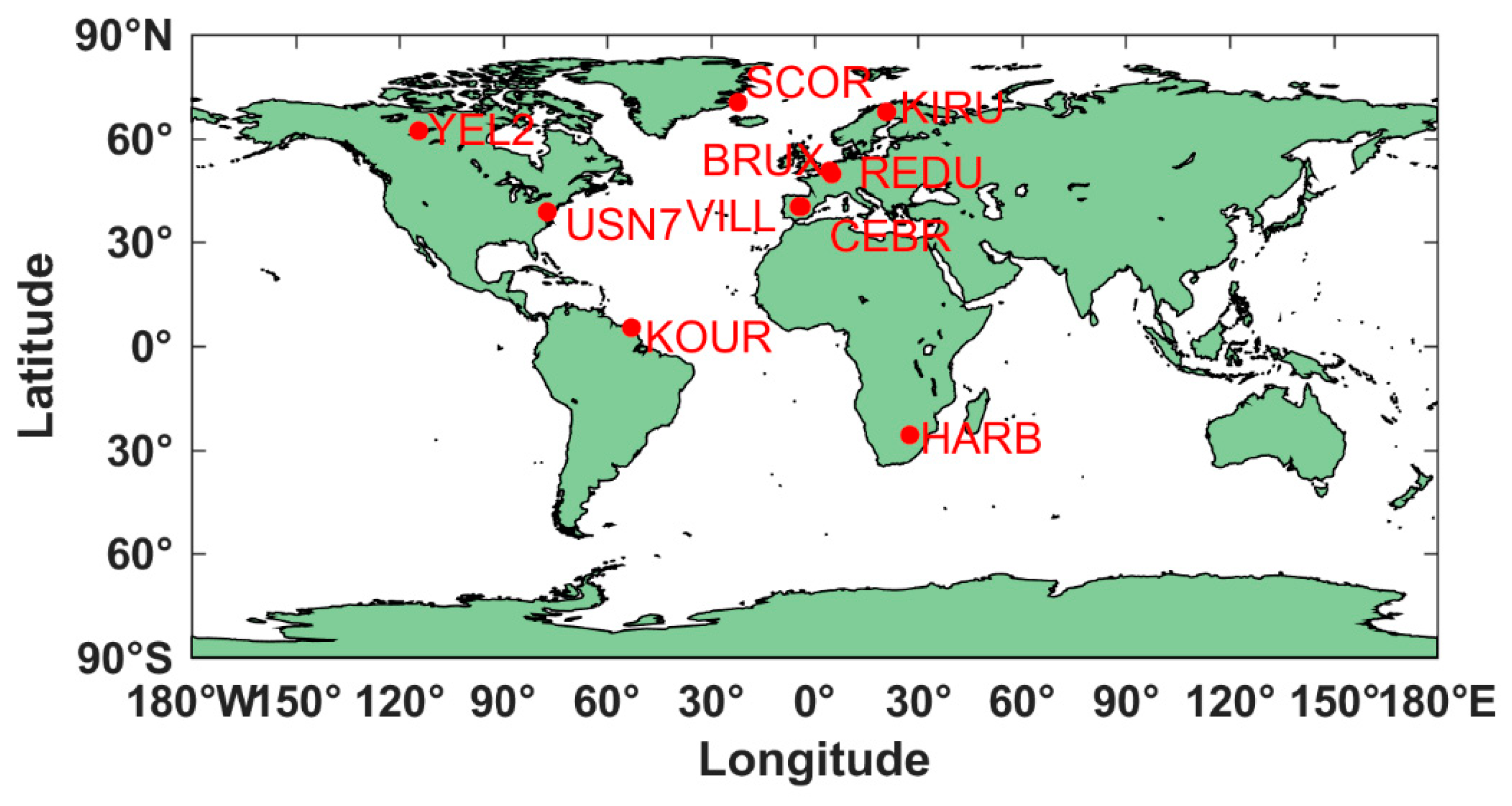
3. Processing Strategies and Experimental Data
4. Results
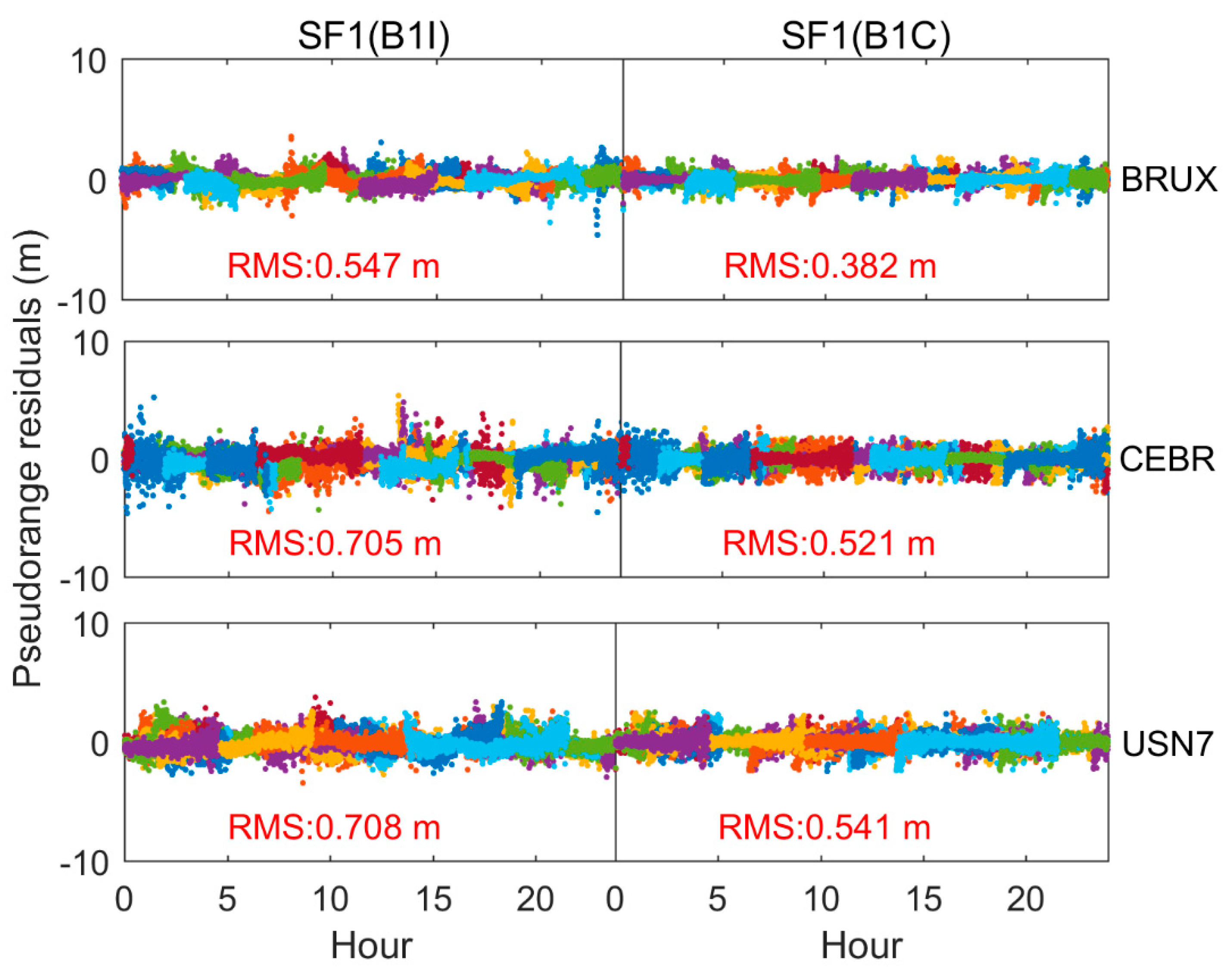
4.1. The Multipath Error Analysis of B1C and B1I Observations
4.2. Different SF Model Comparison with B1I Observations
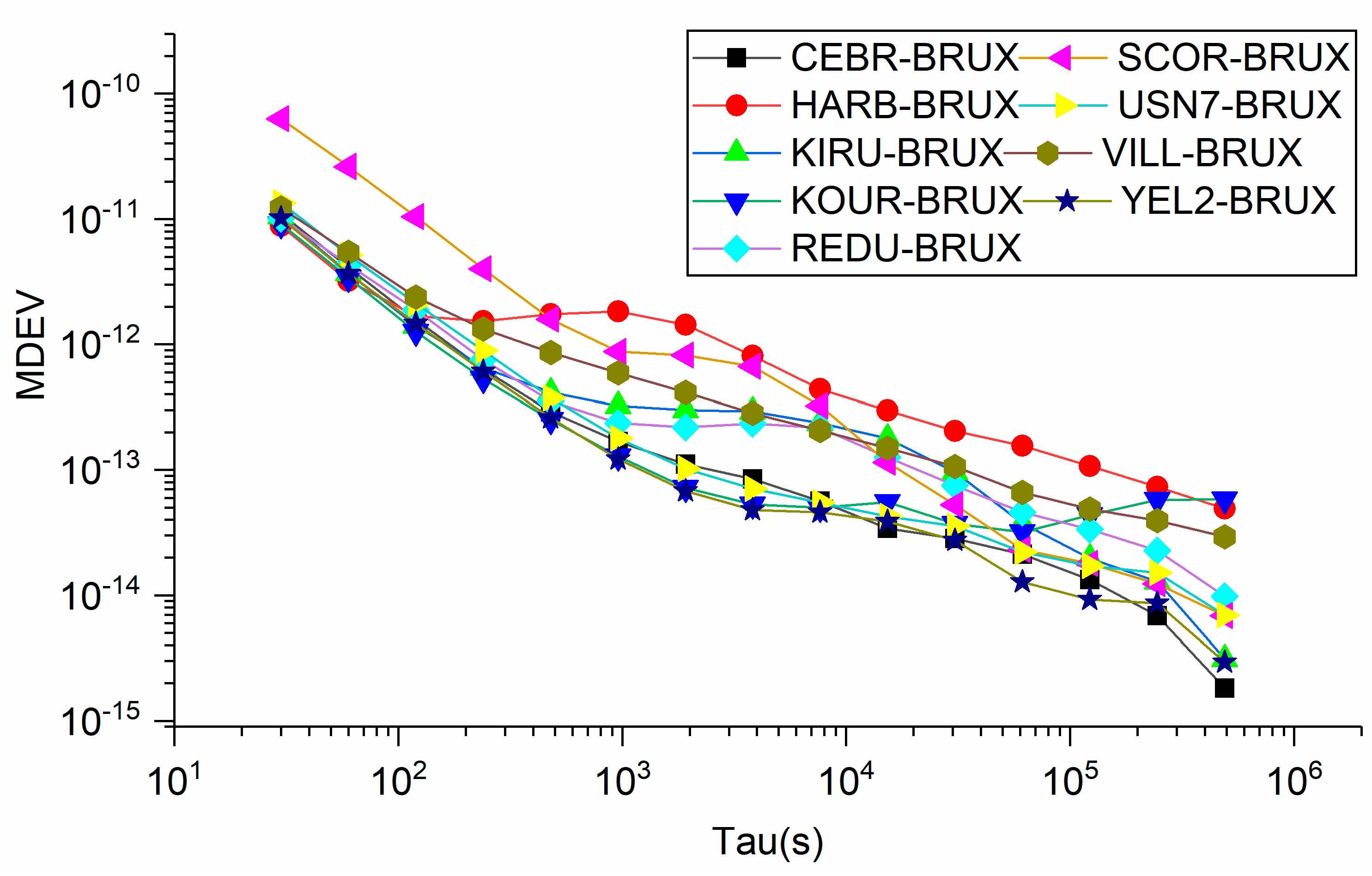
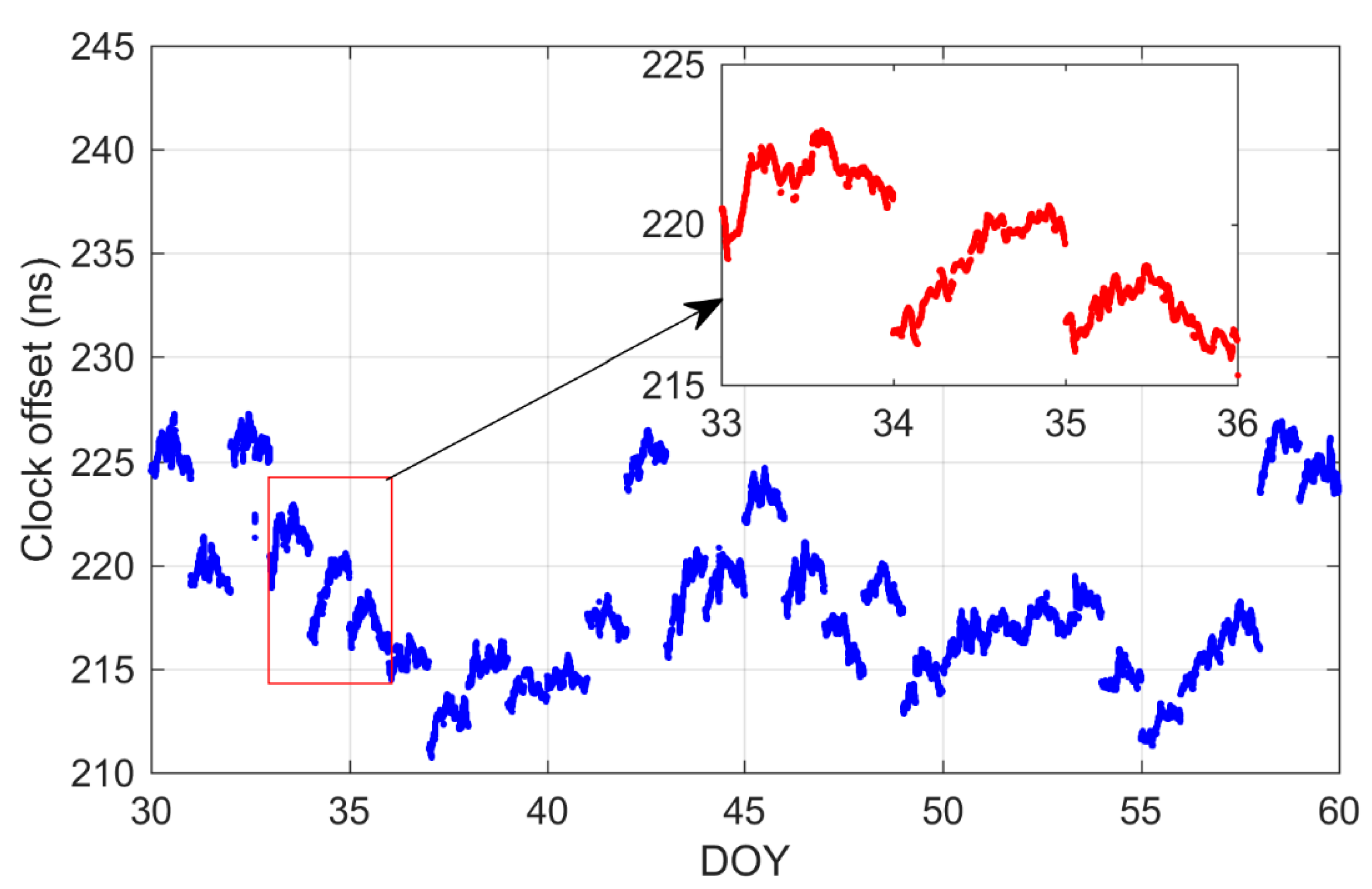
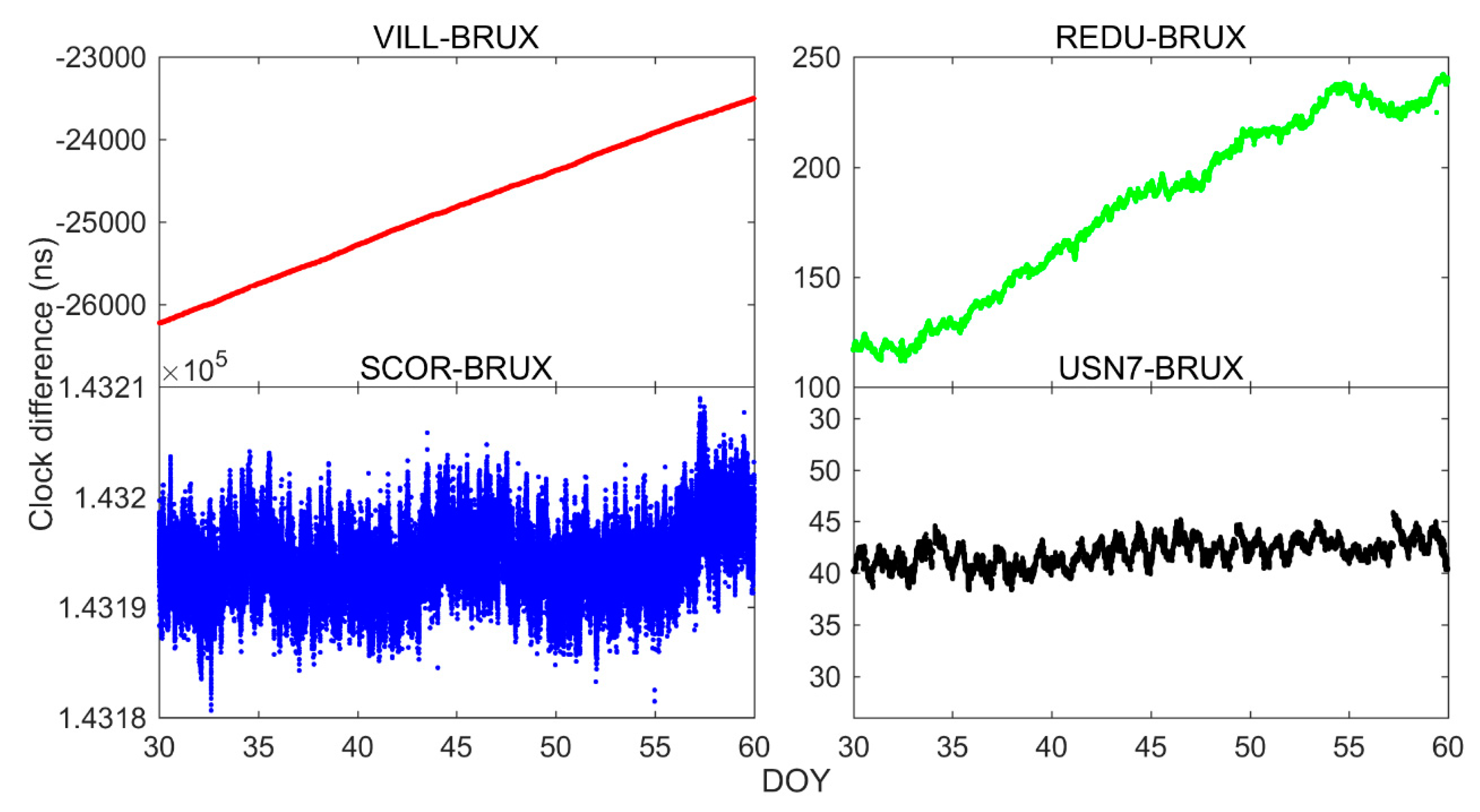
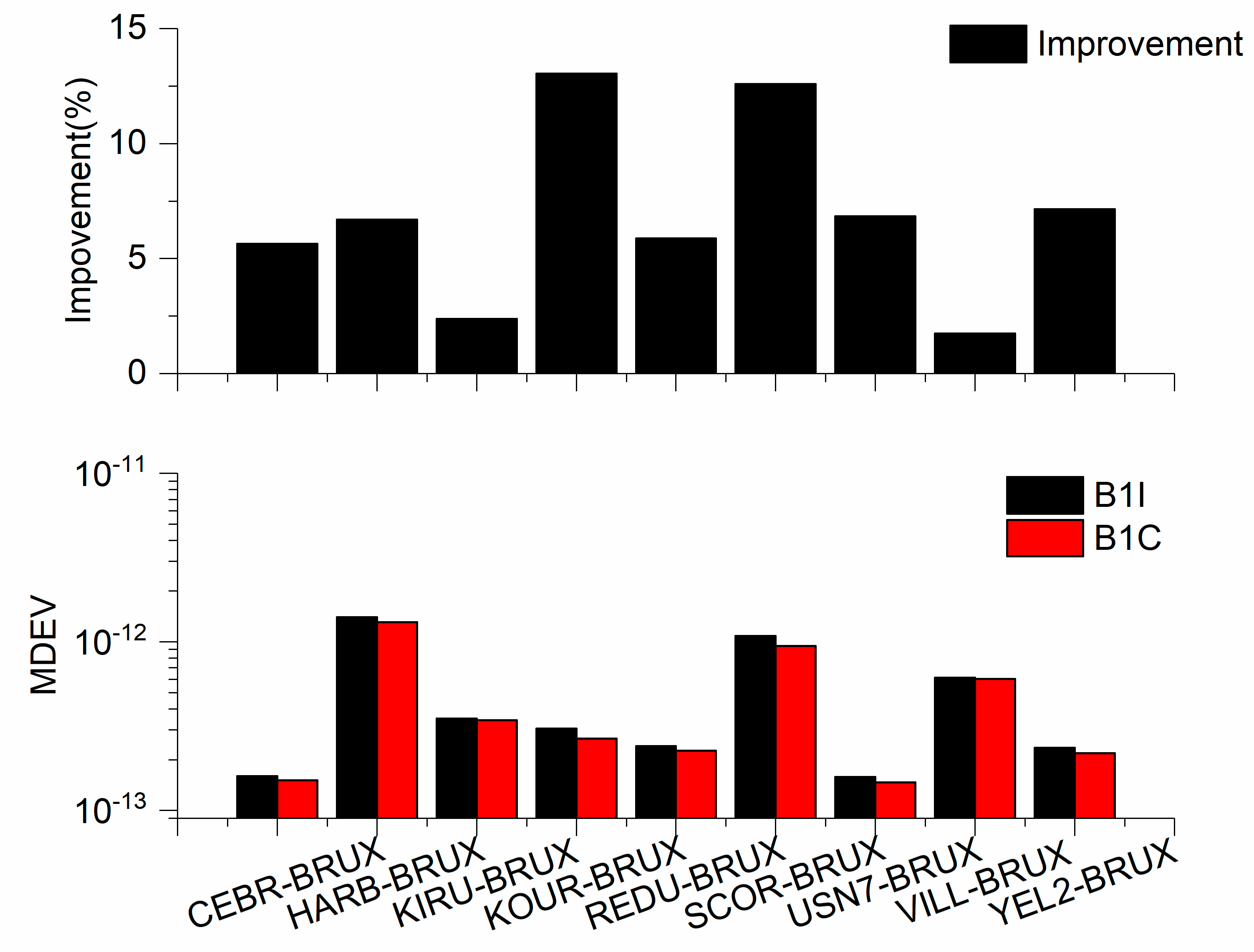
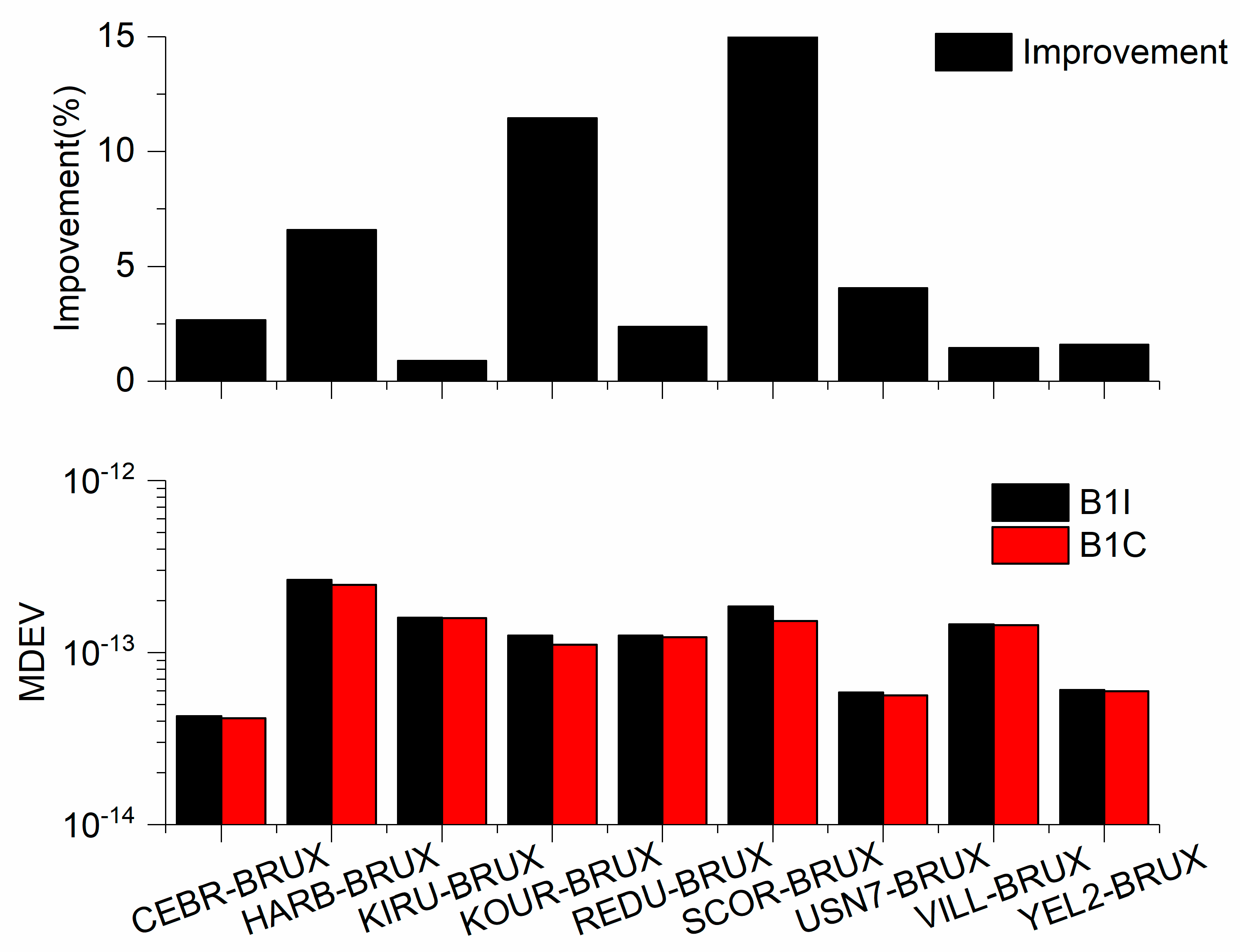
4.3. SF PPP Time Transfer with B1C and B1I
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AV | All in view |
| BDS | BeiDou Navigation Satellite System |
| CV | Common view |
| CNES | Centre National d’Etudes Spatiales |
| DOY | Day of year |
| DF | Dual-frequency |
| DCB | Differential code bias |
| ERTK | EWL real-time kinematic |
| IF | Ionospheric-free |
| MDEV | Modified Allan deviation |
| OMC | Observed minus computed |
| POD | Precision orbit determination |
| PPP | Precise point positioning |
| PNT | Positioning, navigation and Timing |
| PCO | Phase center offset |
| QF | Quad-frequency |
| RMS | Root mean squares |
| RTK | Real-time kinematic |
| SPP | Single-point positioning |
| SMC | Short-message communication |
| TF | Triple-frequency |
| STD | Standard deviation |
| SF | Single frequency |
| UCD | Uncalibrated Code delay |
| ZTD | Zenith troposphere delay |
References
- Yang, Y.; Gao, W.; Guo, S.; Mao, Y.; Yang, Y. Introduction to BeiDou-3 navigation satellite system. Navigation 2019, 66, 7–18. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Mao, Y.; Sun, B. Basic performance and future developments of BeiDou global navigation satellite system. Satell. Navig. 2020, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Tao, J.; Liu, J.; Hu, Z.; Zhao, Q.; Chen, G.; Ju, B. Initial Assessment of the BDS-3 PPP-B2b RTS compared with the CNES RTS. GPS Solut. 2021, 25, 131. [Google Scholar] [CrossRef]
- Nie, Z.; Wang, B.; Wang, Z.; He, K. An offshore real-time precise point positioning technique based on a single set of BeiDou short-message communication devices. J. Geod. 2020, 94, 78. [Google Scholar] [CrossRef]
- Zhang, Y.; Kubo, N.; Chen, J.; Wang, J.; Wang, H. Initial Positioning Assessment of BDS New Satellites and New Signals. Remote Sens. 2019, 11, 1320. [Google Scholar] [CrossRef] [Green Version]
- Lu, M.; Li, W.; Yao, Z.; Cui, X. Overview of BDS III new signals. Navigation 2019, 66, 19–35. [Google Scholar] [CrossRef] [Green Version]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Ge, M.; Li, Y.; Shen, W.; Zhang, H.; Schuh, H. Railway irregularity measuring using Rauch–Tung–Striebel smoothed multi-sensors fusion system: Quad-GNSS PPP, IMU, odometer, and track gauge. GPS Solut. 2018, 22, 36. [Google Scholar] [CrossRef]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Multi-GNSS high-rate RTK, PPP and novel direct phase observation processing method: Application to precise dynamic displacement detection. Meas. Sci. Technol. 2018, 29, 035002. [Google Scholar] [CrossRef]
- Szot, T.; Specht, C.; Specht, M.; Dabrowski, P.S. Comparative analysis of positioning accuracy of Samsung Galaxy smartphones in stationary measurements. PLoS ONE 2019, 14, e0215562. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial assessment of the COMPASS/BeiDou-3: New-generation navigation signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Jiao, G.; Song, S.; Liu, Y.; Su, K.; Cheng, N.; Wang, S. Analysis and Assessment of BDS-2 and BDS-3 Broadcast Ephemeris: Accuracy, the Datum of Broadcast Clocks and Its Impact on Single Point Positioning. Remote Sens. 2020, 12, 2081. [Google Scholar] [CrossRef]
- Zeng, T.; Sui, L.; Ruan, R.; Jia, X.; Feng, L. Uncombined precise orbit and clock determination of GPS and BDS-3. Satell. Navig. 2020, 1, 19. [Google Scholar] [CrossRef]
- Shi, J.; Ouyang, C.; Huang, Y.; Peng, W. Assessment of BDS-3 global positioning service: Ephemeris, SPP, PPP, RTK, and new signal. GPS Solut. 2020, 24, 81. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Z.; Miao, W.; Chen, G.E. Improved precise positioning with BDS-3 quad-frequency signals. Satell. Navig. 2020, 1, 30. [Google Scholar] [CrossRef]
- Jin, S.; Su, K. PPP models and performances from single- to quad-frequency BDS observations. Satell. Navig. 2020, 1, 16. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, Y.; Yuan, Y. PPP-RTK based on undifferenced and uncombined observations: Theoretical and practical aspects. J. Geod. 2018, 93, 1011–1024. [Google Scholar] [CrossRef]
- Li, Z.; Chen, W.; Ruan, R.; Liu, X. Evaluation of PPP-RTK based on BDS-3/BDS-2/GPS observations: A case study in Europe. GPS Solut. 2020, 24, 38. [Google Scholar] [CrossRef]
- Xu, Y.; Yang, Y.; Li, J. Performance evaluation of BDS-3 PPP-B2b precise point positioning service. GPS Solut. 2021, 25, 142. [Google Scholar] [CrossRef]
- Su, K.; Jin, S. Triple-frequency carrier phase precise time and frequency transfer models for BDS-3. GPS Solut. 2019, 23, 86. [Google Scholar] [CrossRef]
- Ge, Y.; Ding, S.; Qin, W.; Zhou, F.; Yang, X.; Wang, S. Performance of ionospheric-free PPP time transfer models with BDS-3 quad-frequency observations. Measurement 2020, 160, 107836. [Google Scholar] [CrossRef]
- Guang, W.; Zhang, J.; Yuan, H.; Wu, W.; Dong, S. Analysis on the time transfer performance of BDS-3 signals. Metrologia 2020, 57, 065023. [Google Scholar] [CrossRef]
- Ge, Y.; Cao, X.; Shen, F.; Yang, X.; Wang, S. BDS-3/Galileo Time and Frequency Transfer with Quad-Frequency Precise Point Positioning. Remote Sens. 2021, 13, 2704. [Google Scholar] [CrossRef]
- Ge, Y.; Chen, S.; Wu, T.; Fan, C.; Qin, W.; Zhou, F.; Yang, X. An analysis of BDS-3 real-time PPP: Time transfer, positioning, and tropospheric delay retrieval. Measurement 2021, 172, 108871. [Google Scholar] [CrossRef]
- Ge, Y.; Zhou, F.; Dai, P.; Qin, W.; Wang, S.; Yang, X. Precise point positioning time transfer with multi-GNSS single-frequency observations. Measurement 2019, 146, 628–642. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.G.; Yuan, Y.; Zhang, H.; Li, M. Joint estimation of vertical total electron content (VTEC) and satellite differential code biases (SDCBs) using low-cost receivers. J. Geod. 2017, 92, 401–413. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Dong, D.; Ge, M.; Li, P.; Wickert, J.; Schuh, H. Simultaneous estimation of GLONASS pseudorange inter-frequency biases in precise point positioning using undifferenced and uncombined observations. GPS Solut. 2018, 22, 19. [Google Scholar] [CrossRef]
- Erol, S.; Alkan, R.M.; Ozulu, I.M.; Ilçi, V. Real-time and post–mission kinematic precise point positioning performance analysis in marine environments. Geod. Geodyn. 2020, 11, 401–410. [Google Scholar] [CrossRef]
- Xiong, J.; Han, F. Positioning performance analysis on combined GPS/BDS precise point positioning. Geod. Geodyn. 2019, 11, 78–83. [Google Scholar] [CrossRef]
- Cai, C.; Gong, Y.; Gao, Y.; Kuang, C. An Approach to Speed up Single-Frequency PPP Convergence with Quad-Constellation GNSS and GIM. Sensors 2017, 17, 1302. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Zhang, B.; Zhang, X. SUPREME: An open-source single-frequency uncombined precise point positioning software. GPS Solut. 2021, 25, 86. [Google Scholar] [CrossRef]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orienation on GPS carrier phase. Manuscr. Geod. 1992, 18, 91–98. [Google Scholar]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. In The Use of Artificial Satellites for Geodesy; Geophysical Monograph Series; American Geophysical Union: Washington, DC, USA, 1972; Volume 15, pp. 247–251. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef] [Green Version]
- Petit, G.; Luzum, B. IERS Conventions; No. IERS-TN-36; Bureau International des Poids et Mesures Sevres: Sèvres, France, 2010. [Google Scholar]
- Hong, J.; Tu, R.; Zhang, R.; Fan, L.; Zhang, P.; Han, J.; Lu, X. Analyzing the Satellite-Induced Code Bias Variation Characteristics for the BDS-3 Via a 40 m Dish Antenna. Sensors 2020, 20, 1339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, C.; Wu, X.; Zheng, F.; Wang, X.; Wang, J. Modeling of BDS-2/BDS-3 single-frequency PPP with B1I and B1C signals and positioning performance analysis. Measurement 2021, 178, 109355. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Receiver | Antenna | Clock |
|---|---|---|---|
| CEBR | SEPT POLARX4 | SEPCHOKE_MC | H-MASER |
| HARB | TRIMBLE NETR9 | TRM59800.00 | CESIUM |
| REDU | SEPT POLARX4 | SEPCHOKE_MC | CESIUM |
| SCOR | JAVAD TRE_G3TH SIGMA | ASH701941.B | RUBIDIUM |
| VILL | SEPT POLARX4 | SEPCHOKE_MC | CESIUM |
| USN7 | ASHTECH Z-XII3T | TPSCR.G5 | H-MASER |
| KIRU | SEPT POLARX4 | SEPCHOKE_MC | CESIUM |
| KOUR | SEPT POLARX4 | SEPCHOKE_MC | H-MASER |
| BRUX | SEPT POLARX4TR | JAVRINGANT_DM | UTC(ROB) |
| YEL2 | SEPT POLARX4TR | LEIAR25.R4 | H-MASER |
| Scheme | Strategies |
|---|---|
| Estimation method | Kalman filter |
| Signal selected | BDS-3: B1I and B1C |
| Sampling rate | 30 s |
| Phase wind-up | Modified [32] |
| Tropospheric delay | ZHD: modified by models [33] |
| ZWD: estimated using GMF [34] | |
| Tidal displacement | Modified [35] |
| Cut-off angle | 10° |
| Sagnac effect | Modified [35] |
| Station coordinates | Fixed |
| Relativistic effect | Modified [35] |
| PCV and PCO | igs14.atx |
| Phase ambiguities | Estimate as constant |
| DCB | DLR |
| Receiver clock offset | White noise |
| Ionospheric delay | White noise |
| Mean | STD | |||
|---|---|---|---|---|
| SF1 | SF2 | SF1 | SF2 | |
| CEBR_BRUX | 3.65 | −8.16 | 0.64 | 0.66 |
| HARB_BRUX | 4.93 | −5.35 | 0.90 | 0.98 |
| KIRU_BRUX | 0.17 | −7.91 | 0.64 | 0.68 |
| KOUR_BRUX | 1.45 | −4.82 | 0.93 | 0.94 |
| REDU_BRUX | 0.46 | −3.33 | 0.60 | 0.82 |
| SCOR_BRUX | 17.21 | 6.10 | 0.65 | 0.77 |
| USN7_BRUX | 1.13 | −7.04 | 0.90 | 0.91 |
| VILL_BRUX | 4.84 | −6.69 | 0.67 | 0.68 |
| YEL2_BRUX | 3.35 | −9.63 | 0.76 | 0.77 |
| Mean | STD | Improvement (%) | |||
|---|---|---|---|---|---|
| B1I | B1C | B1I | B1C | ||
| CEBR_BRUX | 3.65 | 4.58 | 0.64 | 0.63 | 1.56 |
| HARB_BRUX | 4.93 | 4.86 | 0.90 | 0.85 | 5.55 |
| KIRU_BRUX | 0.17 | 1.55 | 0.74 | 0.71 | 4.03 |
| KOUR_BRUX | 1.45 | 2.74 | 0.93 | 0.89 | 4.30 |
| REDU_BRUX | 0.46 | 1.34 | 0.60 | 0.51 | 15.00 |
| SCOR_BRUX | 17.21 | 13.48 | 0.65 | 0.61 | 6.15 |
| USN7_BRUX | 1.13 | 1.16 | 0.90 | 0.86 | 4.44 |
| VILL_BRUX | 4.84 | 5.32 | 0.67 | 0.63 | 5.97 |
| YEL2_BRUX | 3.35 | 4.20 | 0.76 | 0.75 | 1.31 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Ge, Y.; Meng, X.; Shen, P.; Wang, K.; Ke, F. Modelling and Assessment of Single-Frequency PPP Time Transfer with BDS-3 B1I and B1C Observations. Remote Sens. 2022, 14, 1146. https://doi.org/10.3390/rs14051146
Wang S, Ge Y, Meng X, Shen P, Wang K, Ke F. Modelling and Assessment of Single-Frequency PPP Time Transfer with BDS-3 B1I and B1C Observations. Remote Sensing. 2022; 14(5):1146. https://doi.org/10.3390/rs14051146
Chicago/Turabian StyleWang, Shengli, Yulong Ge, Xiaolin Meng, Pengli Shen, Kaidi Wang, and Fuyang Ke. 2022. "Modelling and Assessment of Single-Frequency PPP Time Transfer with BDS-3 B1I and B1C Observations" Remote Sensing 14, no. 5: 1146. https://doi.org/10.3390/rs14051146
APA StyleWang, S., Ge, Y., Meng, X., Shen, P., Wang, K., & Ke, F. (2022). Modelling and Assessment of Single-Frequency PPP Time Transfer with BDS-3 B1I and B1C Observations. Remote Sensing, 14(5), 1146. https://doi.org/10.3390/rs14051146