
Challenges with Regard to Unmanned Aerial Systems (UASs) Measurement of River Surface Velocity Using Doppler Radar

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
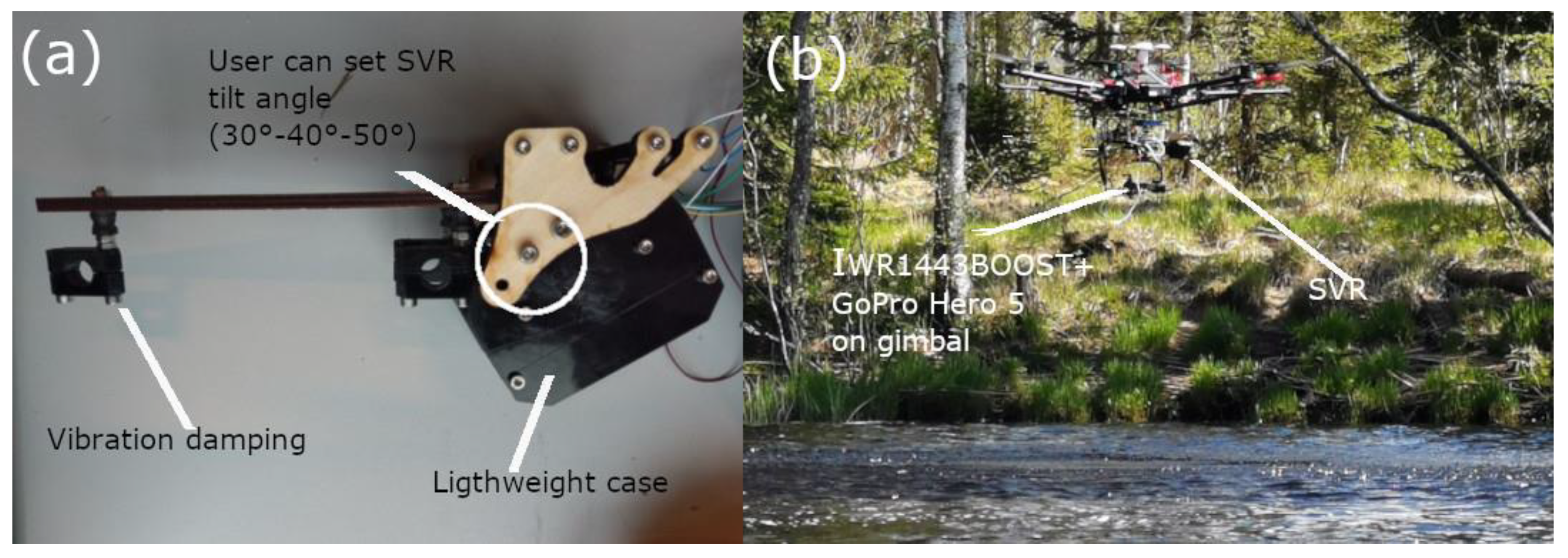
2.1. UAS Platform and Payload
2.1.1. SVR Outputs
2.1.2. Ground-Truth Velocity Observations
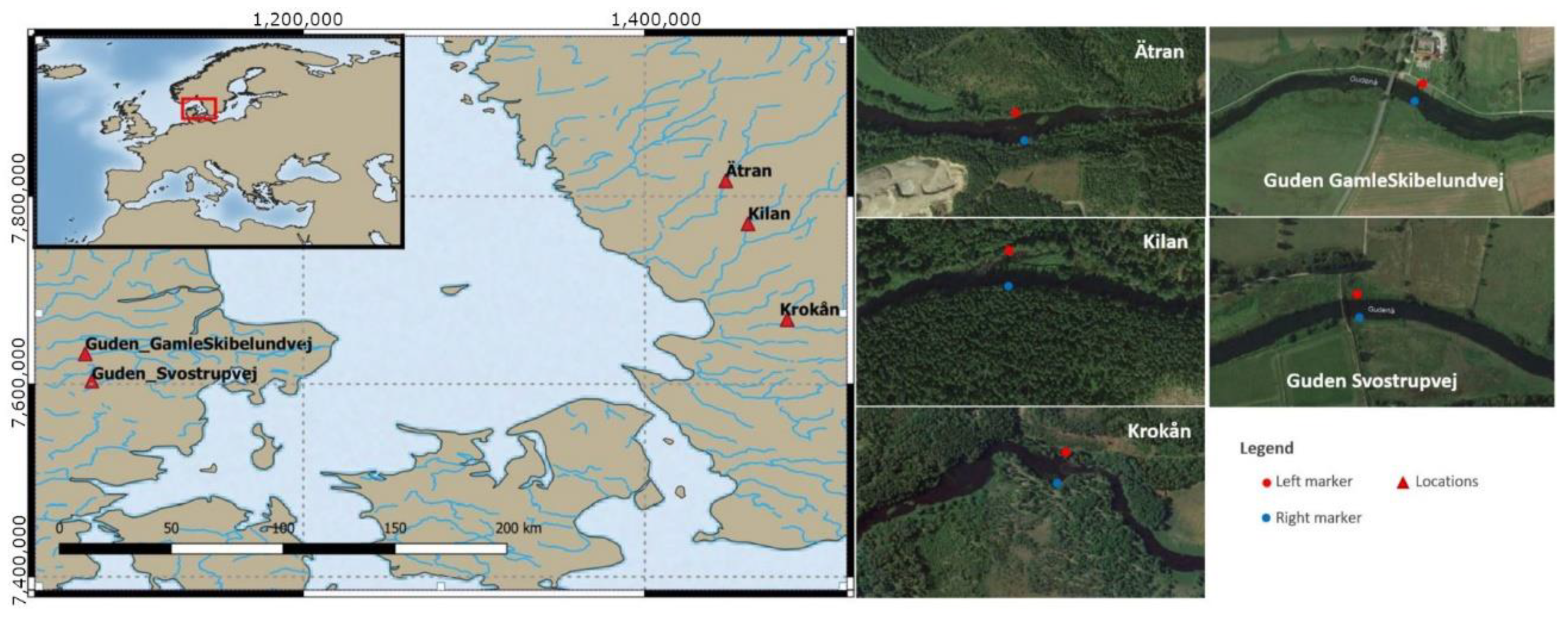
2.2. Study Areas
2.3. Data Acquisition and Processing
2.3.1. GNSS Processing
2.3.2. PIV
- A sequence of frames of ca. 5–10 s was extracted from the video.
- A MATLAB script was used to stabilize the video using natural stable features on the ground (e.g., rocks, land);
- Lens distortion was corrected using the calibration-derived camera intrinsic parameters;
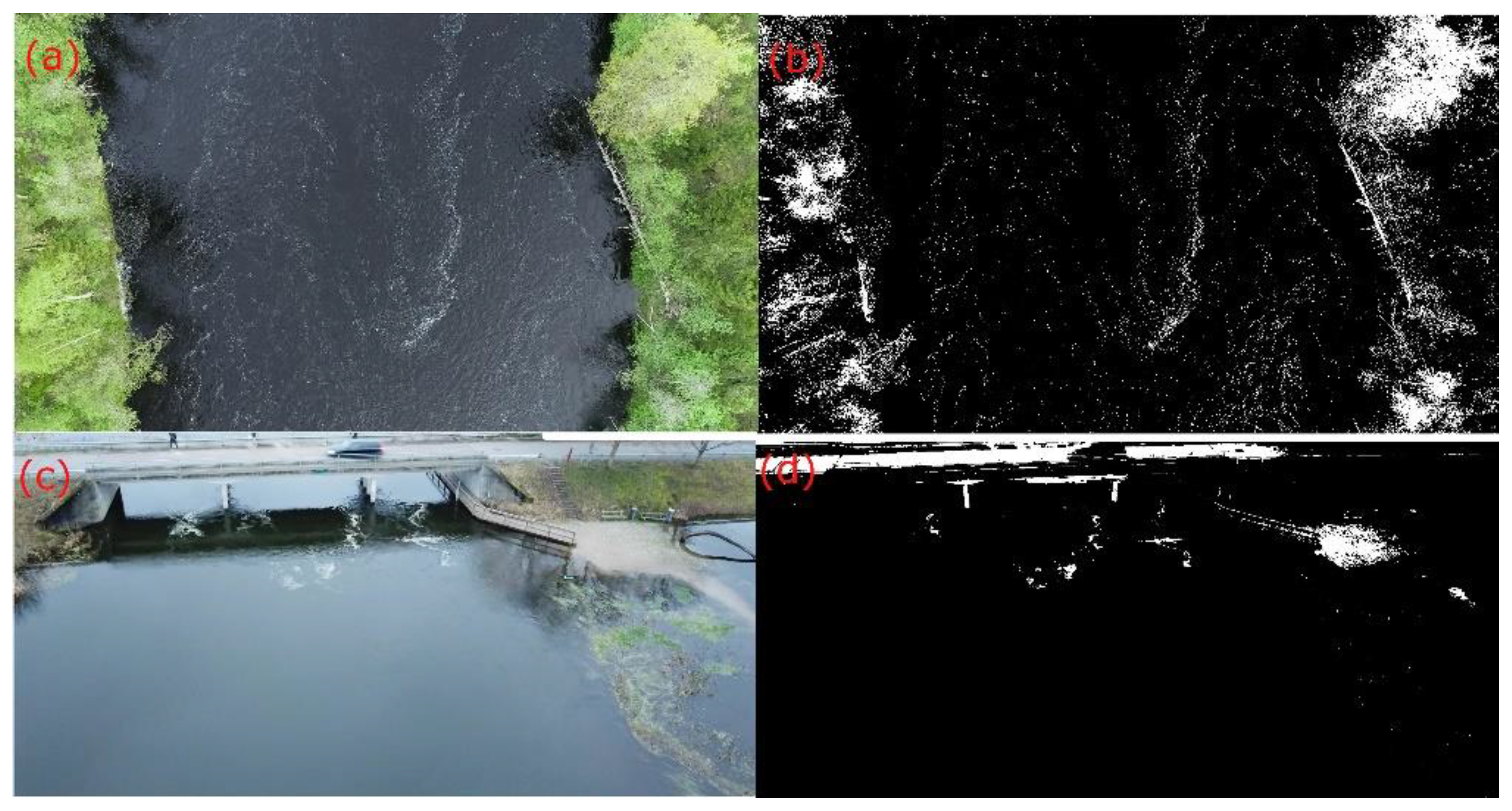
- A segmentation method was applied to the video frames to convert the RGB frames into binary images, in which white is assigned to the seeding particles (natural or artificial), while black is assigned to the surroundings (e.g., water surface);
- The surface velocity field was estimated with the image cross-correlation techniques implemented in the open-access software PIVlab for MATLAB [51]. A region of interest (ROI) was drawn where surface velocity across the XS had to be computed: the width of the ROI was equal to the river width and its length was ca. 4–5 m along the river course. In the PIV analysis, four different interrogation areas of size 256, 128, 64, and 32 pixels were chosen. After the PIV analysis, standard deviations (temporal standard deviation across video sequence) of the velocity vectors were analyzed: only a few frames showing clear outliers in velocity vectors (typically due to UAS vibrations or sudden movements) were discarded. A velocity field was extracted by computing the mean velocity vectors over the non-discarded frames.
- The velocity in pixel units was then converted into metric unit. To this end, the coordinates of two markers (one pole on each streambank) were used to estimate the ratio between distance in pixels and distance in meters. The coordinates of two markers were found by identifying the position of the two markers in a previously acquired UAS-borne orthophoto.
2.3.3. SVR
- Although the sensor can theoretically measure from up to 20–25 m altitude above the water surface, the signal strength decreases with altitude. Thus, lower altitude is preferable in order to maintain good SNR.
- Lower altitude translates into a smaller footprint, which is a positive effect in terms of spatial resolution but a negative effect in terms of the size of the area in which measurements are averaged. In particular, smaller areas may also correspond to fewer scatterers, which may even result in a weaker signal.
- Furthermore, during flight at low altitude (less than 6–7 m above the water surface), the UAS-generated downwash induces significant turbulence on the water surface, thus affecting the water surface velocity (undesired effect) whilst at the same time increasing surface roughness (positive effect) [38].
2.3.4. Extraction of the Surface Velocity Profile along the XS
- For PIV, each velocity vector retrieved at a maximum orthogonal distance to the XS line of 5 m (ROI length) was assigned to an interval of the XS line by nearest neighbor search. The magnitude of the velocity vector was computed. In case multiple vectors contained in the ROI length were assigned to the same interval, a median of the magnitude of those velocity vectors and a spatial standard deviation were computed. Thus, for PIV, the standard deviation is an estimate of the spatial variability, indeed it is computed among all the velocity vectors computed along the river course (inside the ROI) for each XS discretization interval.
- For SVR, velocity observations were filtered according to the maximum orthogonal distance from the XS line (only observations at a maximum distance of 5 m were included). A median (and standard deviation) was computed to average the SVR observations obtained during the sampling period during which the UAS-borne SVR was hovering in that XS interval. Thus, for SVR, standard deviation is computed from the velocity observations in the SVR sampling period: its computation is different compared to standard deviation for PIV.
3. Results
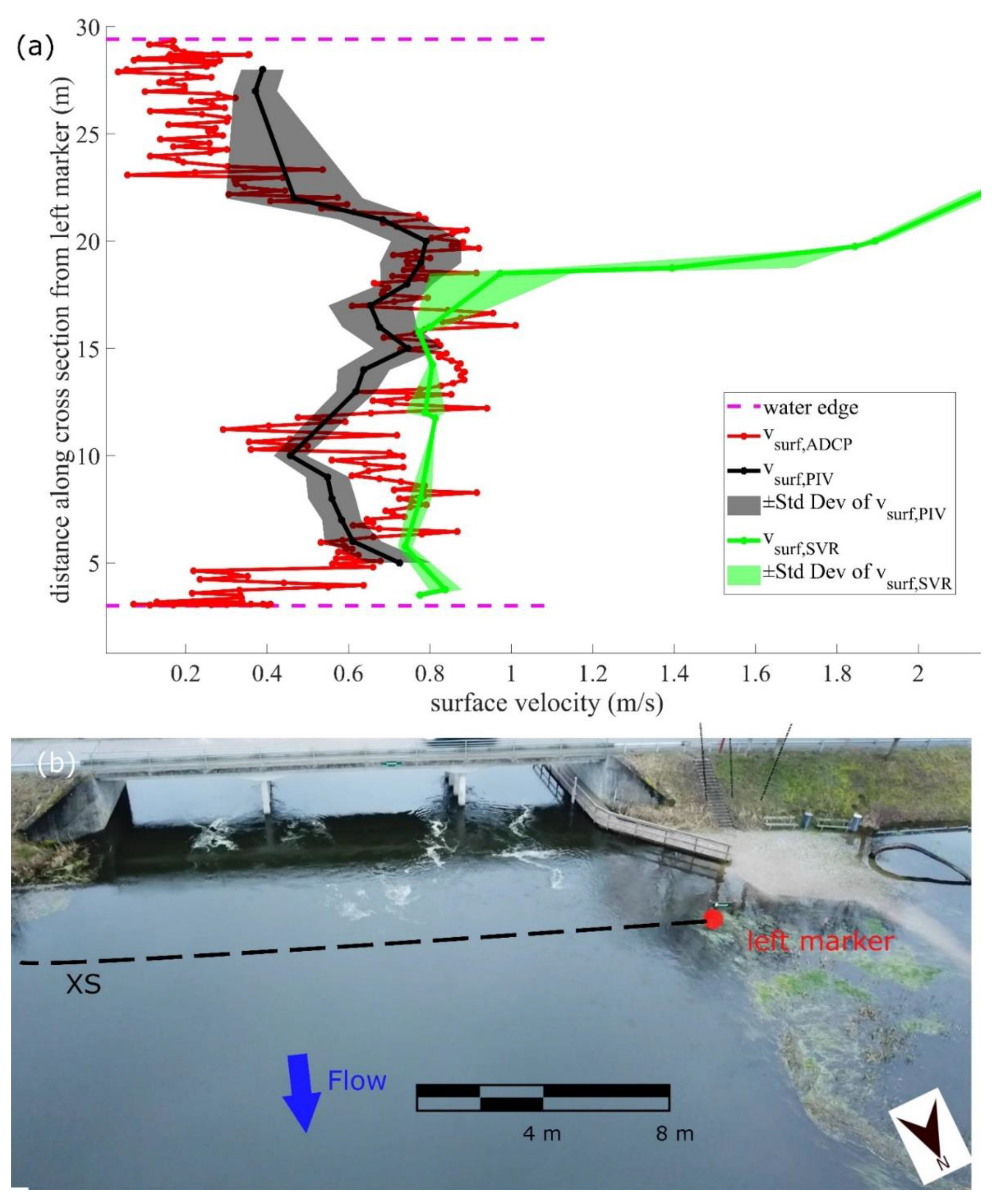
3.1. Comparison Plots
- The camera tilt angle was not nadir (tilted of ca. 30°) for complying with UAS legislation, which constrains UAS flights in the proximity of public roads (i.e., the bridge): the tilted camera could have introduced an uncorrected distortion effect affecting the pixel into metric unit conversion.
- Seeding was not uniformly distributed and tended to cluster.
- Wind (ca. 0.7 m s−1) flowing against the river flow may have affected the seeding speed.
- ADCP does not measure velocity at the water surface but only ≈0.2 m below it. Given the average depth of this XS (ca. 2.25 m) and the low bed roughness (low vegetation density during the survey time and clayish bottom), wind is typically the main factors that may make surface velocity differ from velocity at 0.2 m depth.
3.2. Statistics
4. Discussion
4.1. PIV
4.1.1. PIV Advantages
- PIV estimates both magnitude and angle of the velocity vector (thus can detect velocity along and across the XS).
- PIV estimates the velocity field over the entire XS width in one single video and also gives information about the spatial variability along the portion of the river course that is visible in the video.
- PIV estimates velocity with a high spatial resolution (typically dependent on the interrogation area size).
- PIV videos can be stabilized so that the effects of UAS vibrations and drifts are reduced.
4.1.2. PIV Limitations
- Seeding characteristics, such as density and distribution, control the quality of PIV estimates [21,24]. Artificial seeding was used in the Danish streams, in which the number of trackable natural features on the water surface was insufficient. Thus, in those conditions, PIV required one operator for flying the UAS and multiple operators to add artificial seeding. This was not the case in Swedish streams, in which a sufficient number of natural particles or foam was present. However, if the streams were surveyed during different seasons, the foam (generated by decomposition processes) may be not visible, thus artificial seeding may be required.
- PIV required a longer processing time than SVR, velocity probe, or ADCP measurements—ca. 20–30 min per survey when PIV is applied. Indeed, even though most post-processing can be automatized, time is still required for video editing, sequence selection, stabilization and PIVlab processing.
- PIV is cumbersome in very large rivers: the surveyed rivers were only a few tens of meters wide (the widest XS was ca. 52 m); however, if the rivers were several tens or hundreds of meters, it would be impossible to cover the entire river width with a single video and thus multiple videos should be acquired, causing additional complexity in (i) georeferencing every single video or/and mosaicking multiple videos, (ii) stabilizing videos in which stable features on streambanks are not visible, and (iii) adding artificial uniform seeding over large river widths in cases where natural seeding is insufficient.
- The velocity at which seeding moves is directly affected by wind. This is especially critical for lightweight tracers, which are more affected by wind because a large portion of their volume is above the water surface.
- PIV using optical cameras only works under good daylight conditions and fails during the night.
4.1.3. PIV Results
4.1.4. Comparison of PIV Results with Previous Studies
4.2. SVR
4.2.1. SVR Advantages
- SVR does not require seeding on the water surface.
- SVR processing time is deterministic and can be fully automatized, making it suitable also for real-time velocity determination (e.g., during floods).
- SVR is ideal to be applied in large rivers (e.g., several tens or hundreds of meters wide), especially when the SVR footprint is small compared to the river width. In this case, a flight conducted at 10–15 m altitude across an XS could measure the entire horizontal velocity profile.
- SVR performance is independent of daylight conditions.
4.2.2. SVR Limitations
- The SVR (and Doppler radar instruments in general) requires water roughness for receiving a sufficient amplitude of backscattered signal. This may be critical over lowland streams which have soft riverbed materials, mild slopes and velocities. In those rivers, the main source of surface roughness would be wind.
- Microwave antennas of Doppler radar instruments have a beam-width on the order of a few tens of degrees. The SVR footprint is large (12° Azimuth, 24° Elevation): only one averaged observation is output for the entire footprint. This leads to a poor spatial resolution and becomes critical when the velocity changes rapidly across the river width.
- The SVR only measures the velocity of waves traveling toward or away from the antenna in the plane of incidence, so it cannot determine the velocity in all the other directions.
- The tested SVR instrument has internal filters that are optimized for static deployment. Despite the choice of filter type (moving average or infinite impulse response) and filtering window, our tests show that the SVR needs a long time (at least 20–30 s) during which the SVR is stable before the velocity measurements are smoothed, as also reported by Fulton et al. [47]. This can become critical for UAS-deployment, in which drone vibrations and drifts have a direct impact on measured velocity.
- The SVR velocity measurements could not be corrected for drone vibrations and drifts. Because the UAS-borne Inertial Measurement Unit and GNSS system can measure UAS velocity, roll angle, pitch angle and heading, ideally the Doppler radar measurements should be corrected for these known drone movements. However, this would require the Doppler radar to output raw signal data, instead of processed velocity (as for the deployed SVR).
4.2.3. SVR Results
- The uncertainty in UAS navigation (typically a couple of meters) and in UAS height (ca. 0.5 m), together with the large SVR scanning angle, that may cause that the water surface areas illuminated by the SVR antennas are different.
- The uncertainty in UAS heading angle (ca. 5°) that may cause misalignment between the UAS-borne SVR and the flow direction of the river.
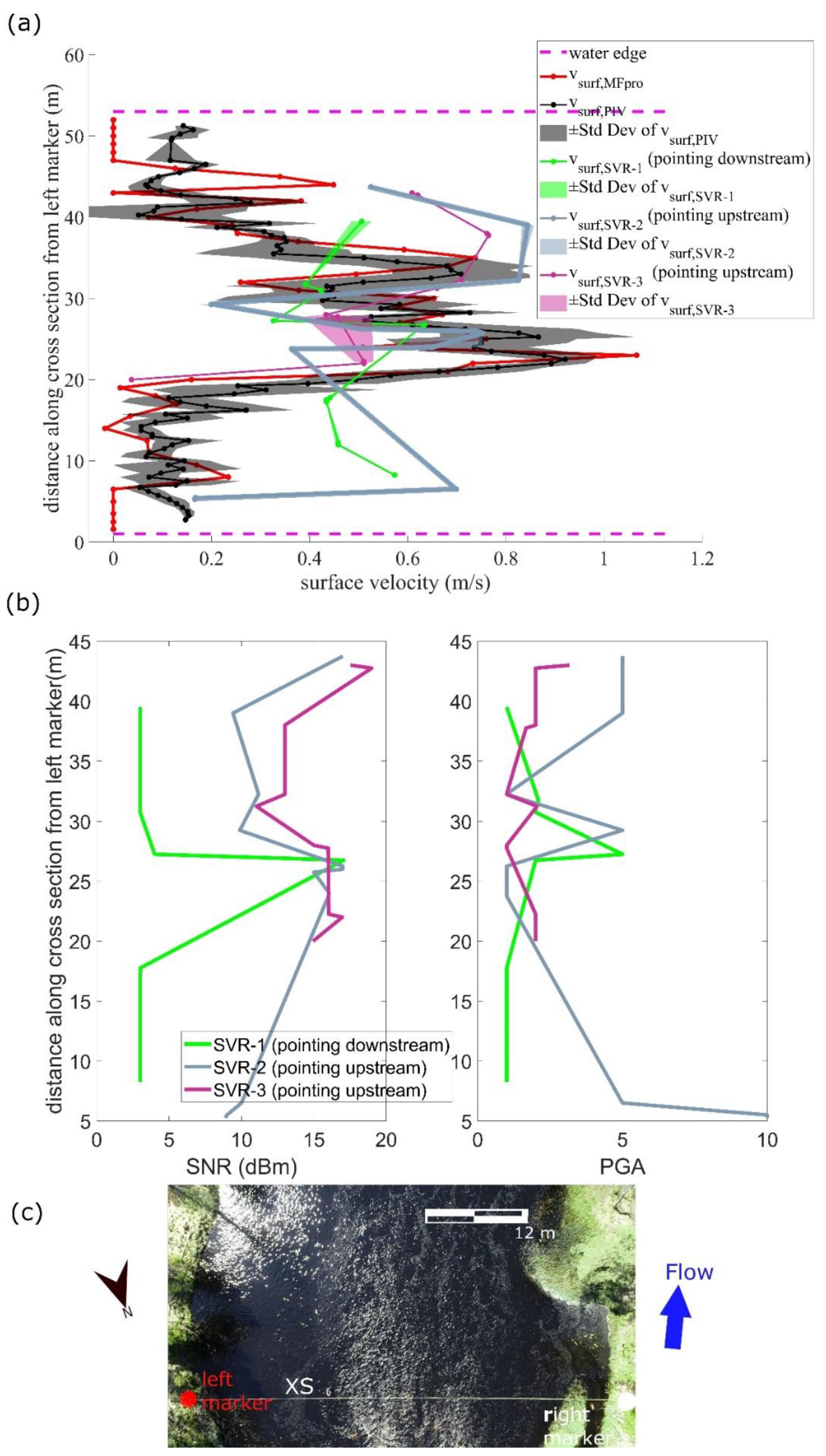
- Disturbance caused by the SVR antenna beam illuminating portions of soil or vegetation, as also reported in Fulton et al. [47]. This was the case for the test conducted in the Kilan River (SE), which showed that the bar in the center of the river caused unrealistic velocity readings, and in all the measurements conducted close to the streambanks. Thus, larger river widths without rapid changes of water velocity across the XS should be preferred in site selection because they allow for having semi-constant surface velocity in the SVR footprint.
- Errors caused by multipath, e.g., radiation hitting the UAS and further reflected towards water, should be further examined because they can be substantial as the UAS is made of conductive carbon fiber.
- The sites in Denmark showed too low water roughness (low SNR). However, in the Swedish tests, PGA is typically less than 5, which, according to the manufacturer, may mean that the reflected signal is very strong, and the receiver may be oversaturated, which could result in reduced accuracy. Thus, sites should be selected carefully because high-water roughness (e.g., strong macro-turbulence) can limit the accuracy, whilst too low water roughness results in unreliable measurements. Ideally, according to Melcher et al. [38], water roughness should be preferably caused by wind.
4.2.4. Wind Effect and Flight Altitude
4.2.5. Comparison of SVR Results with Previous Studies
4.3. Future Research
5. Conclusions
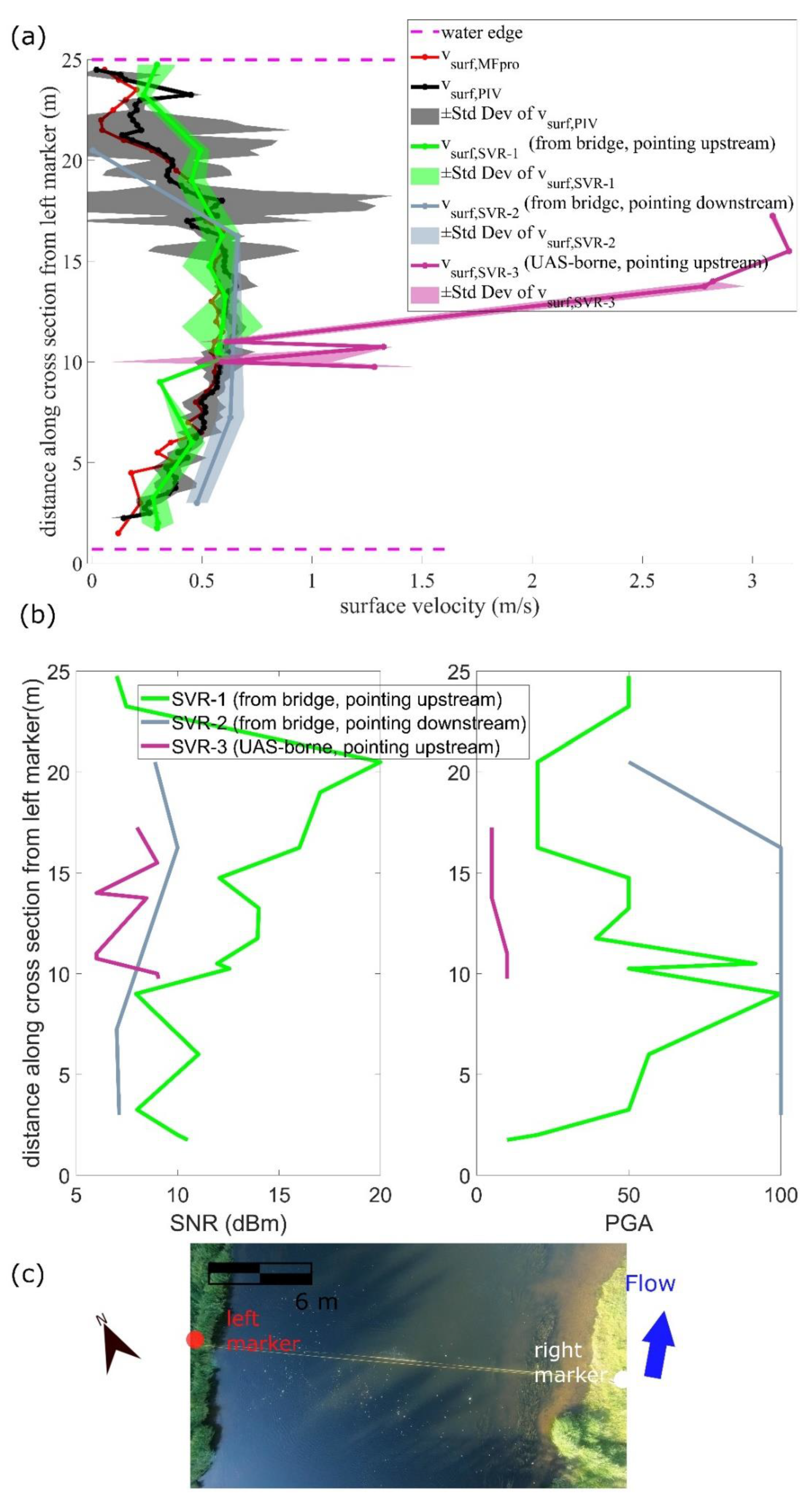
- PIV matched well with ground-truth in the Swedish rivers (where natural seeding was sufficient) and in Denmark (where artificial seeding was added) with typical velocity errors of 10 cm s−1 or better and R2 typically larger than 0.7 (specifically larger than 0.85 in two XSs). Only in one XS were the errors larger (RMSE greater than 15 cm s−1 and R2 equal to 0.67) because of wind, clustering seeding, non-nadir looking camera (and potentially because in that case, ground-truth was acquired with ADCP, which can measure velocity only ca. 0.2 m below the surface). The static SVR test (from bridge) conducted in Guden Å showed good agreement (differences typically smaller than 10 cm s−1) with ground-truth velocity measurements (apart from the portion close to the streambanks).
- The UAS-borne SVR tests conducted in Guden Å showed unrealistic velocity observations, apart from a portion of the one XS (Guden_Svostrupvej), which showed good agreement with ground-truth.
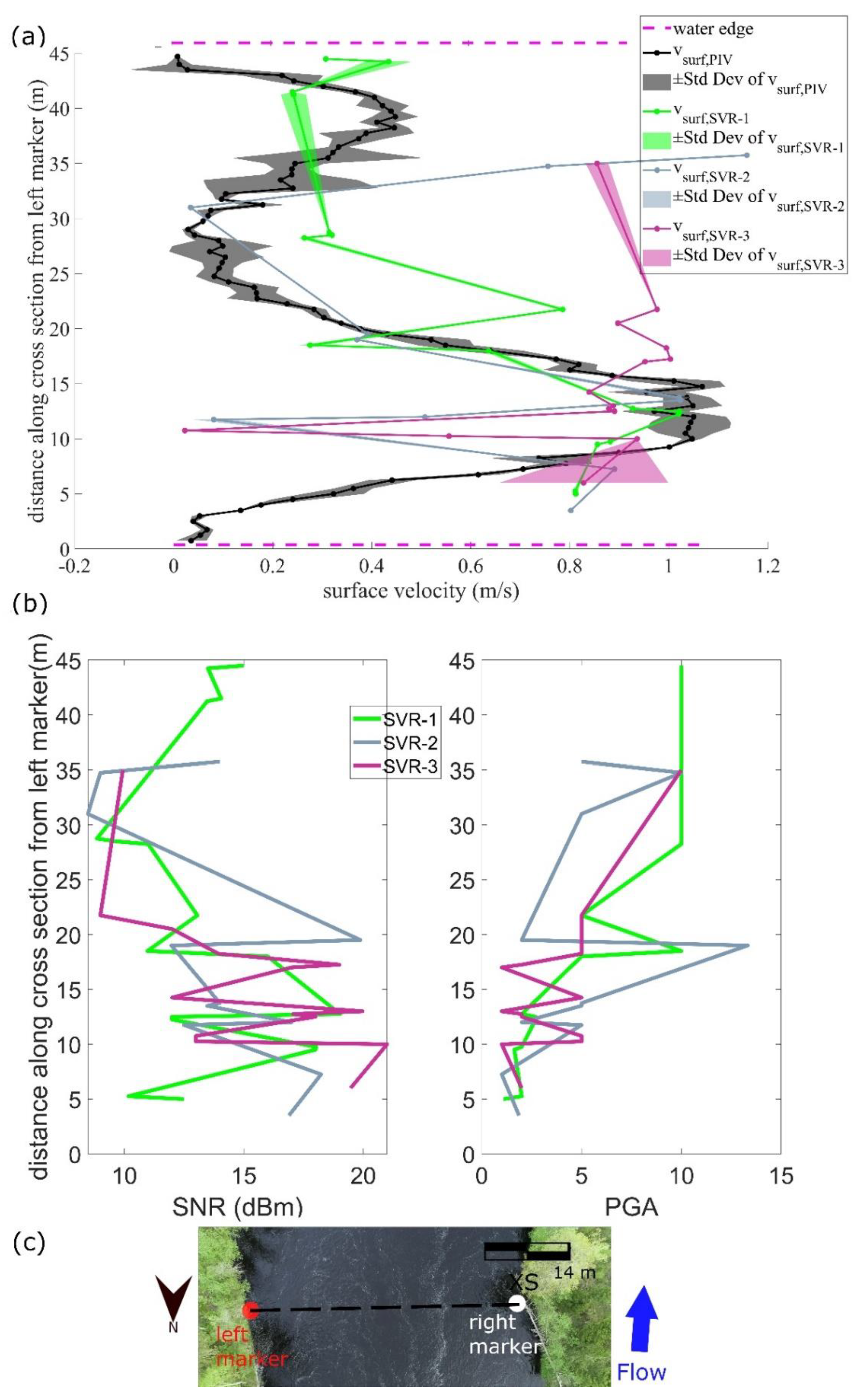
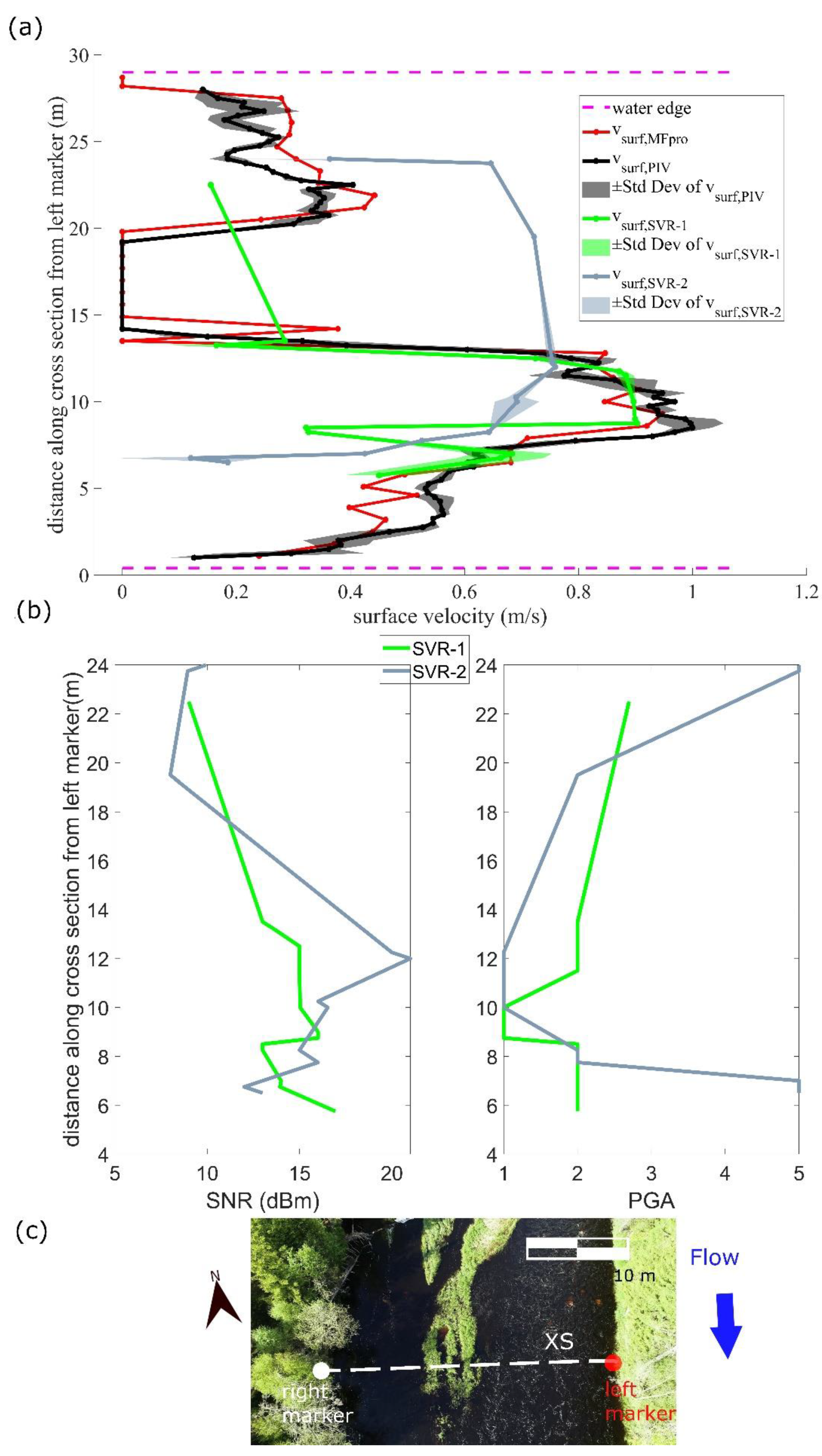
- The UAS-borne SVR conducted in Sweden showed high SNR and, in some cases, good agreement with ground-truth in the faster flowing portions. However, different SVR flights showed significant differences in SVR measurements, thus the repeatability of the results should be further investigated.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sukhodolov, A.; Uijttewaal, W.S.J.; Engelhardt, C. On the correspondence between morphological and hydrodynamical patterns of groyne fields. Earth Surf. Process. Landf. 2002, 27, 289–305. [Google Scholar] [CrossRef]
- Ashworth, P.J. Mid-Channel bar growth and its relationship to local flow strength and direction. Earth Surf. Process. Landf. 1996, 21, 103–123. [Google Scholar] [CrossRef]
- Jodeau, M.; Hauet, A.; Paquier, A.; Le Coz, J.; Dramais, G. Application and evaluation of LS-PIV technique for the monitoring of river surface velocities in high flow conditions. Flow Meas. Instrum. 2008, 19, 117–127. [Google Scholar] [CrossRef] [Green Version]
- Sayeed-Bin-Asad, S.M.; Lundström, T.S.; Andersson, A.G.; Hellström, J.G.I. A Review of Particle Image Velocimetry for Fish Migration. World J. Mech. 2016, 6, 131–149. [Google Scholar] [CrossRef] [Green Version]
- Strelnikova, D.; Paulus, G.; Käfer, S.; Anders, K.H.; Mayr, P.; Mader, H.; Scherling, U.; Schneeberger, R. Drone-Based optical detection of heterogeneous surface flow patterns in the vicinity of fish ladders. Agit. J. fur Angew. Geoinformatik 2020, 6, 206–216. [Google Scholar] [CrossRef]
- Strelnikova, D.; Paulus, G.; Käfer, S.; Anders, K.H.; Mayr, P.; Mader, H.; Scherling, U.; Schneeberger, R. Drone-Based optical measurements of heterogeneous surface velocity fields around fish passages at hydropower dams. Remote Sens. 2020, 12, 384. [Google Scholar] [CrossRef] [Green Version]
- Bandini, F.; Lüthi, B.; Peña-Haro, S.; Borst, C.; Liu, J.; Karagkiolidou, S.; Hu, X.; Lemaire, G.G.; Bjerg, P.L.; Bauer-Gottwein, P. A drone-borne method to jointly estimate discharge and Manning’s roughness of natural streams. Water Resour. Res. 2020, 57, e2020WR028266. [Google Scholar] [CrossRef]
- Genç, O.; Ardiçlioğlu, M.; Ağiralioğlu, N. Calculation of mean velocity and discharge using water surface velocity in small streams. Flow Meas. Instrum. 2015, 41, 115–120. [Google Scholar] [CrossRef]
- Bechle, A.J.; Wu, C.H. An entropy-based surface velocity method for estuarine discharge measurement. Water Resour. Res. 2014, 50, 6106–6128. [Google Scholar] [CrossRef]
- Moramarco, T.; Corato, G.; Melone, F.; Singh, V.P. An entropy-based method for determining the flow depth distribution in natural channels. J. Hydrol. 2013, 497, 176–188. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Kinzel, P.J.; Nelson, J.M. Remote measurement of river discharge using thermal particle image velocimetry (PIV) and various sources of bathymetric information. J. Hydrol. 2017, 554, 490–506. [Google Scholar] [CrossRef]
- Hauet, A.; Kruger, A.; Krajewski, W.F.; Bradley, A.; Muste, M.; Creutin, J.D.; Wilson, M. Experimental system for real-time discharge estimation using an image-based method. J. Hydrol. Eng. 2008, 13, 105–110. [Google Scholar] [CrossRef]
- Patalano, A.; García, C.M.; Rodríguez, A. Rectification of Image Velocity Results (RIVeR): A simple and user-friendly toolbox for large scale water surface Particle Image Velocimetry (PIV) and Particle Tracking Velocimetry (PTV). Comput. Geosci. 2017, 109, 323–330. [Google Scholar] [CrossRef]
- Thumser, P.; Haas, C.; Tuhtan, J.A.; Fuentes-Pérez, J.F.; Toming, G. RAPTOR-UAV: Real-time particle tracking in rivers using an unmanned aerial vehicle. Earth Surf. Processes Landf. 2017, 42, 2439–2446. [Google Scholar] [CrossRef]
- Koutalakis, P.; Tzoraki, O.; Zaimes, G. Uavs for hydrologic scopes: Application of a low-cost UAV to estimate surface water velocity by using three different image-based methods. Drones 2019, 3, 14. [Google Scholar] [CrossRef] [Green Version]
- Tauro, F.; Piscopia, R.; Grimaldi, S. PTV-Stream: A simplified particle tracking velocimetry framework for stream surface flow monitoring. Catena 2019, 172, 378–386. [Google Scholar] [CrossRef]
- Tauro, F.; Piscopia, R.; Grimaldi, S. Streamflow Observations From Cameras: Large-Scale Particle Image Velocimetry or Particle Tracking Velocimetry? Water Resour. Res. 2017, 53, 10374–10394. [Google Scholar] [CrossRef] [Green Version]
- Pearce, S.; Ljubicic, R.; Peña-Haro, S.; Perks, M.; Tauro, F.; Pizarro, A.; Dal Sasso, S.F.; Strelnikova, D.; Grimaldi, S.; Maddock, I.; et al. An evaluation of image velocimetry techniques under low flow conditions and high seeding densities using unmanned aerial systems. Remote Sens. 2020, 12, 232. [Google Scholar] [CrossRef] [Green Version]
- Perks, M.T.; Fortunato Dal Sasso, S.; Hauet, A.; Jamieson, E.; Le Coz, J.; Pearce, S.; Peña-Haro, S.; Pizarro, A.; Strelnikova, D.; Tauro, F.; et al. Towards harmonisation of image velocimetry techniques for river surface velocity observations. Earth Syst. Sci. Data 2020, 12, 1545–1559. [Google Scholar] [CrossRef]
- Lloyd, P.M.; Stansby, P.K.; Ball, D.J. Unsteady surface-velocity field measurement using particle tracking velocimetry. J. Hydraul. Res. 1995, 33, 519–534. [Google Scholar] [CrossRef]
- Dal Sasso, S.F.; Pizarro, A.; Samela, C.; Mita, L.; Manfreda, S. Exploring the optimal experimental setup for surface flow velocity measurements using PTV. Environ. Monit. Assess. 2018, 190, 460. [Google Scholar] [CrossRef]
- Eltner, A.; Sardemann, H.; Grundmann, J. Flow velocity and discharge measurement in rivers using terrestrial and UAV imagery. Hydrol. Earth Syst. Sci. Discuss. 2019, 289, 1–29. [Google Scholar] [CrossRef]
- Eltner, A.; Sardemann, H.; Grundmann, J. Technical Note: Flow velocity and discharge measurement in rivers using terrestrial and unmanned-aerial-vehicle imagery. Hydrol. Earth Syst. Sci. 2020, 24, 1429–1445. [Google Scholar] [CrossRef] [Green Version]
- Pizarro, A.; Dal Sasso, S.F.; Perks, M.T.; Manfreda, S. Identifying the optimal spatial distribution of tracers for optical sensing of stream surface flow. Hydrol. Earth Syst. Sci. 2020, 24, 5173–5185. [Google Scholar] [CrossRef]
- Dal Sasso, S.F.; Pizarro, A.; Pearce, S.; Maddock, I.; Manfreda, S. Increasing LSPIV performances by exploiting the seeding distribution index at different spatial scales. J. Hydrol. 2021, 598, 126438. [Google Scholar] [CrossRef]
- Adrian, R.J. Twenty years of particle image velocimetry. Exp. Fluids 2005, 39, 159–169. [Google Scholar] [CrossRef]
- Tauro, F. Particle tracers and image analysis for surface flow observations. Wiley Interdiscip. Rev. Water 2016, 3, 25–39. [Google Scholar] [CrossRef]
- Tauro, F.; Petroselli, A.; Arcangeletti, E. Assessment of drone-based surface flow observations. Hydrol. Process. 2015, 30, 1114–1130. [Google Scholar] [CrossRef]
- Tauro, F.; Porfiri, M.; Grimaldi, S. Surface flow measurements from drones. J. Hydrol. 2016, 540, 240–245. [Google Scholar] [CrossRef] [Green Version]
- Detert, M.; Weitbrecht, V. A low-cost airborne velocimetry system: Proof of concept. J. Hydraul. Res. 2015, 53, 532–539. [Google Scholar] [CrossRef]
- Plant, W.J.; Keller, W.C.; Hayes, K. Measurement of river surface currents with coherent microwave systems. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1242–1257. [Google Scholar] [CrossRef]
- Plant, W.J.; Keller, W.C. Evidence of Bragg scattering in microwave Doppler spectra of sea return. J. Geophys. Res. 1990, 95, 16299–16310. [Google Scholar] [CrossRef]
- Wright, J.W. A New Model for Sea Clutter. IEEE Trans. Antennas Propag. 1968, 16, 217–223. [Google Scholar] [CrossRef]
- Bass, F.G.; Fuks, I.M.; Kalmykov, A.I.; Ostrovsky, I.E.; Rosenberg, A.D. Very High Frequency Radiowave Scattering by a Disturbed Sea Surface Part II: Scattering from an actual sea surface. IEEE Trans. Antennas Propag. 1968, 16, 560–568. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Sea surface Ka-band Doppler measurements: Analysis and model development. Remote Sens. 2019, 11, 839. [Google Scholar] [CrossRef]
- Plant, W.J. A model for microwave Doppler sea return at high incidence angles: Bragg scattering from bound, Tilted waves. J. Geophys. Res. Ocean. 1997, 102, 21131–21146. [Google Scholar] [CrossRef]
- Plant, W.J. Microwave sea return at moderate to high incidence angles. Waves Random Media 2003, 13, 339–354. [Google Scholar] [CrossRef] [Green Version]
- Melcher, N.B.; Costa, J.E.; Haeni, F.P.; Cheng, R.T.; Thurman, E.M.; Buursink, M.; Spicer, K.R.; Hayes, E.; Plant, W.J.; Keller, W.C.; et al. River discharge measurements by using helicopter-mounted radar. Geophys. Res. Lett. 2002, 29, 41. [Google Scholar] [CrossRef] [Green Version]
- Biondi, F.; Addabbo, P.; Clemente, C.; Orlando, D. Measurements of surface river doppler velocities with along-track InSAR using a single antenna. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 987–997. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Wheeler, K.; Sadowy, G.; Miller, T.; Shaffer, S.; Muellerschoen, R.; Jones, C.; Zebker, H.; Madsen, S. Uavsar: A new NASA airborne SAR system for science and technology research. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006. [Google Scholar]
- Fulton, J.; Ostrowski, J. Measuring real-time streamflow using emerging technologies: Radar, hydroacoustics, and the probability concept. J. Hydrol. 2008, 357, 1–10. [Google Scholar] [CrossRef]
- Lin, Y.S.; Chiu, S.F.; Chang, C.H. A 24 GHz hydrology radar system capable of wide-range surface velocity detection for water resource management applications. Microw. Opt. Technol. Lett. 2020, 62, 3463–3475. [Google Scholar] [CrossRef]
- Welber, M.; Le Coz, J.; Laronne, J.B.; Zolezzi, G.; Zamler, D.; Dramais, G.; Hauet, A.; Salvaro, M. Field assessment of noncontact stream gauging using portable surface velocity radars (SVR). Water Resour. Res. 2016, 52, 1108–1126. [Google Scholar] [CrossRef] [Green Version]
- Fulton, J.W.; Mason, C.A.; Eggleston, J.R.; Nicotra, M.J.; Chiu, C.L.; Henneberg, M.F.; Best, H.R.; Cederberg, J.R.; Holnbeck, S.R.; Lotspeich, R.R.; et al. Near-Field remote sensing of surface velocity and river discharge using radars and the probability concept at 10 U.S. geological survey streamgages. Remote Sens. 2020, 12, 1296. [Google Scholar] [CrossRef] [Green Version]
- Bolognesi, M.; Farina, G.; Alvisi, S.; Franchini, M.; Pellegrinelli, A.; Russo, P. Measurement of surface velocity in open channels using a lightweight remotely piloted aircraft system. Geomat. Nat. Hazards Risk 2016, 8, 73–86. [Google Scholar] [CrossRef] [Green Version]
- Alimenti, F.; Bonafoni, S.; Gallo, E.; Palazzi, V.; Vincenti Gatti, R.; Mezzanotte, P.; Roselli, L.; Zito, D.; Barbetta, S.; Corradini, C.; et al. Noncontact measurement of river surface velocity and discharge estimation with a low-cost doppler radar sensor. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5195–5207. [Google Scholar] [CrossRef]
- Fulton, J.W.; Anderson, I.E.; Chiu, C.L.; Sommer, W.; Adams, J.D.; Moramarco, T.; Bjerklie, D.M.; Fulford, J.M.; Sloan, J.L.; Best, H.R.; et al. QCam: SUAS-based doppler radar for measuring river discharge. Remote Sens. 2020, 12, 3317. [Google Scholar] [CrossRef]
- Bandini, F.; Sunding, T.P.; Linde, J.; Smith, O.; Jensen, I.K.; Köppl, C.J.; Butts, M.; Bauer-Gottwein, P. Unmanned Aerial System (UAS) observations of water surface elevation in a small stream: Comparison of radar altimetry, LIDAR and photogrammetry techniques. Remote Sens. Environ. 2020, 237, 111487. [Google Scholar] [CrossRef]
- De Schoutheete, F.; D’odeigne, O.C.; Soares-Frazão, S. Drone-Driven Surface Velocity Measurements in Natural Rivers. Available online: https://www.iahr.org/paper/detail?paper_id=2928 (accessed on 14 July 2020).
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. Int. Symp. GPS/GNSS. 2009. Available online: http://gpspp.sakura.ne.jp/paper2005/isgps_2009_rtklib_revA.pdf (accessed on 3 January 2022).
- Thielicke, W.; Stamhuis, E.J. PIVlab—Towards User-friendly, Affordable and Accurate Digital Particle Image Velocimetry in MATLAB. J. Open Res. Softw. 2014, 2, e30. [Google Scholar] [CrossRef] [Green Version]
- Dal Sasso, S.F.; Pizarro, A.; Manfreda, S. Metrics for the quantification of seeding characteristics to enhance image velocimetry performance in rivers. Remote Sens. 2020, 12, 1789. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site Name | Location | Coordinates of Markers Lat, Long (°) | Survey Date | Conducted Surveys | Average Depth (m) | River Width (m) | Bed Type and Aquatic Vegetation Density | |
|---|---|---|---|---|---|---|---|---|
| Left Streambank | Right Streambank | |||||||
| Guden_Svostrupvej | DK | 56.2233, 9.66901 | 56.22319, 9.669384 | 14 February 2020 | UAS-SVR UAS-PIV ADCP | 2.25 | 26 | Clayish, low vegetation density |
| Guden_GamleSkibelundvej | DK | 56.36587, 9.634325 | 56.36568, 9.63458 | 23 June 2020 | Static-SVR UAS-SVR UAS-PIV Mfpro | 1.96 | 24.3 | Clayish, high vegetation density |
| Ätran | SE | 57.27526, 12.99929 | 57.27526, 12.99856 | 28 May 2021 | UAS-SVR UAS-PIV | ≈1.8 | 44 | Rocky, very low density (or absence of) aquatic vegetation |
| Kilan | SE | 57.04974, 13.1166 | 57.04985, 13.11617 | 29 May 2021 | UAS-SVR UAS-PIV Mfpro | 0.63 | 28 | Rocky, very low density (or absence of) aquatic vegetation |
| Krokån | SE | 56.54607, 13.32273 | 56.54636, 13.32207 | 30 May 2021 | UAS-SVR UAS-PIV Mfpro | 0.54 | 52 | Rocky, very low density (or absence of) aquatic vegetation |
| Site Name | Max vsurf | Min vsurf | Mean vsurf | R2 | MAE | MBE | RMSE |
|---|---|---|---|---|---|---|---|
| (m s−1) | (m s−1) | (m s−1) | - | (m s−1) | (m s−1) | (m s−1) | |
| Guden_Svostrupvej | 1.01 | 0.01 | 0.50 | 0.67 | 0.14 | −0.01 | 0.16 |
| Guden_GamleSkibelundvej | 0.60 | 0.04 | 0.40 | 0.88 | 0.06 | 0.04 | 0.07 |
| Ätran | - | - | - | - | - | - | - |
| Kilan | 0.94 | 0.00 | 0.38 | 0.86 | 0.08 | −0.02 | 0.11 |
| Krokån | 1.07 | −0.02 | 0.29 | 0.70 | 0.11 | −0.01 | 0.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bandini, F.; Frías, M.C.; Liu, J.; Simkus, K.; Karagkiolidou, S.; Bauer-Gottwein, P. Challenges with Regard to Unmanned Aerial Systems (UASs) Measurement of River Surface Velocity Using Doppler Radar. Remote Sens. 2022, 14, 1277. https://doi.org/10.3390/rs14051277
Bandini F, Frías MC, Liu J, Simkus K, Karagkiolidou S, Bauer-Gottwein P. Challenges with Regard to Unmanned Aerial Systems (UASs) Measurement of River Surface Velocity Using Doppler Radar. Remote Sensing. 2022; 14(5):1277. https://doi.org/10.3390/rs14051277
Chicago/Turabian StyleBandini, Filippo, Monica Coppo Frías, Jun Liu, Kasparas Simkus, Sofia Karagkiolidou, and Peter Bauer-Gottwein. 2022. "Challenges with Regard to Unmanned Aerial Systems (UASs) Measurement of River Surface Velocity Using Doppler Radar" Remote Sensing 14, no. 5: 1277. https://doi.org/10.3390/rs14051277
APA StyleBandini, F., Frías, M. C., Liu, J., Simkus, K., Karagkiolidou, S., & Bauer-Gottwein, P. (2022). Challenges with Regard to Unmanned Aerial Systems (UASs) Measurement of River Surface Velocity Using Doppler Radar. Remote Sensing, 14(5), 1277. https://doi.org/10.3390/rs14051277