
Parsimonious Gap-Filling Models for Sub-Daily Actual Evapotranspiration Observations from Eddy-Covariance Systems




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
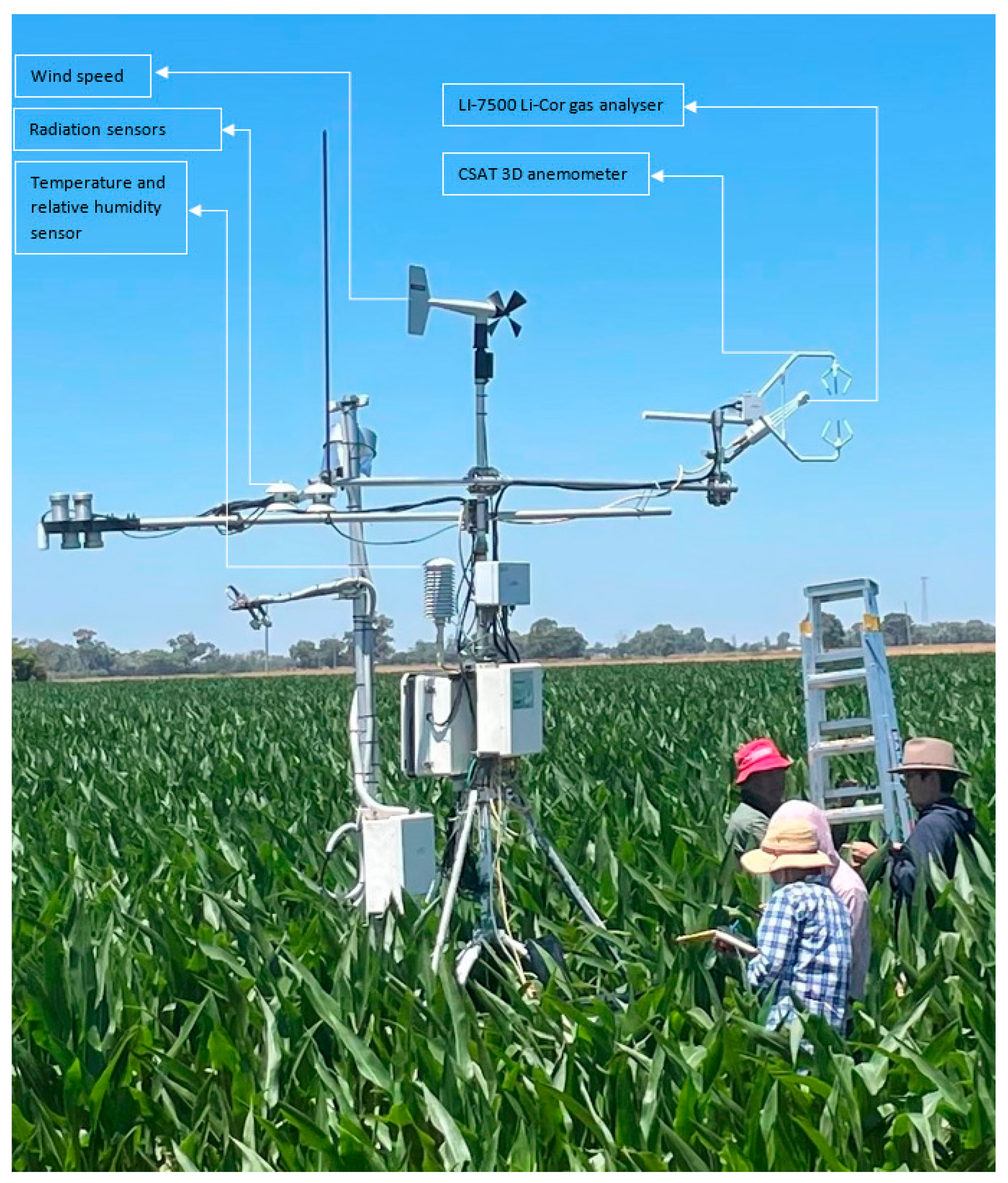
2.1. Monitoring Site for the Eddy-Covariance System and Data
2.2. Three Gap-Filling Models for Sub-Daily ETa
- Full day (FUL)—where data within the day is complete or mostly (≥80%) complete;
- Partial day (PAR)—where part of the data within the day is missing but a substantial portion (30–80%) is still available;
- Sparse day (SPA)—where data within the day is mostly (>70%) missing/erroneous.
- Sinusoidal—Daily sinusoidal functions of ETa: This model uses all available daytime 30-min ETa records on the day to be infilled (each day in the PAR set) to fit a sinusoidal function between ETa and time of the day, which has a period specific to that day. The fitted sinusoidal curve is then used to estimate all 30-min daytime ETa while infilling the missing time steps. We chose the sinusoidal function because of its simplicity and ability to represent the overall diurnal patterns of ETa, which we concluded from a visual assessment of ETa for the FUL days within our records (days with >80% complete data, see details in Section 2.3.1). The sinusoidal function used takes the form of:
- Smoothing—Daily smoothing functions of ETa: This model uses all available daytime ETa data on the day to be infilled to fit a second-order polynomial smoothing function between ETa and time of the day. The fitted smoothing function is then used to infill ETa for the missing time steps. The second-order polynomial smoothing function takes the form of:
- MaxCor—Daily temporal pattern matching for ETa: For each day in the PAR set, this model first calculates the linear correlation (i.e., Pearson correlation coefficient) between the daytime ETa records in the current day and each day in the FUL set. The correlation calculation only considers the common timeslots where data are available in both the current day and each FUL day. Based on these correlations, the FUL day that has the maximum correlation with the day to infill is selected. Within this ‘matching FUL day’, all individual 30-min daytime ETa values (ETa_FUL) are divided by their sum (ETa_tot_FUL) to calculate the proportions of 30-min ETa to the daily total, ETa_prop. This is described in Equation (3), where H = 0, 0.5, 1,… ,24, denoting the time since sunrise in decimal hours:
2.3. Model Evaluation Process
2.3.1. Classifying Daily Data Completeness
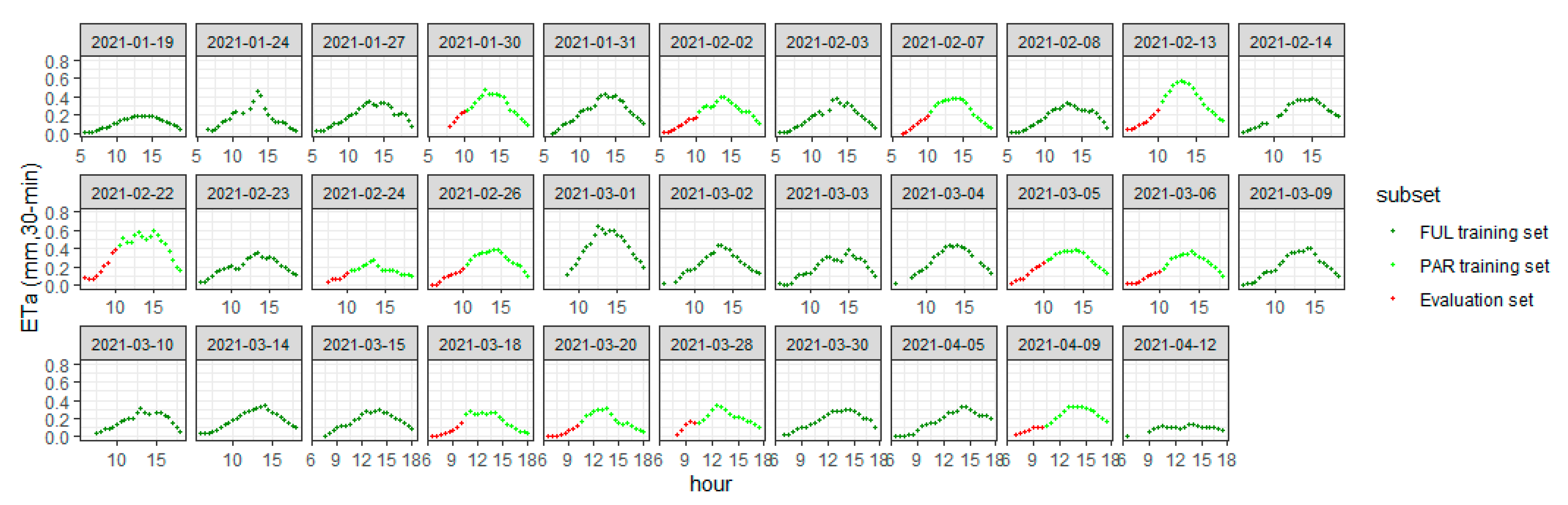
- The FUL set (green in Figure 4) contains days with complete/near complete (≥80%) records. These data will be further divided for training and evaluation of the four infilling models (Section 2.3.2).
- The PAR set (orange in Figure 4) contains days with partially complete (30–80%) records. These data were then used to summarize the typical patterns of missing data. We identified three typical patterns of missing data as:
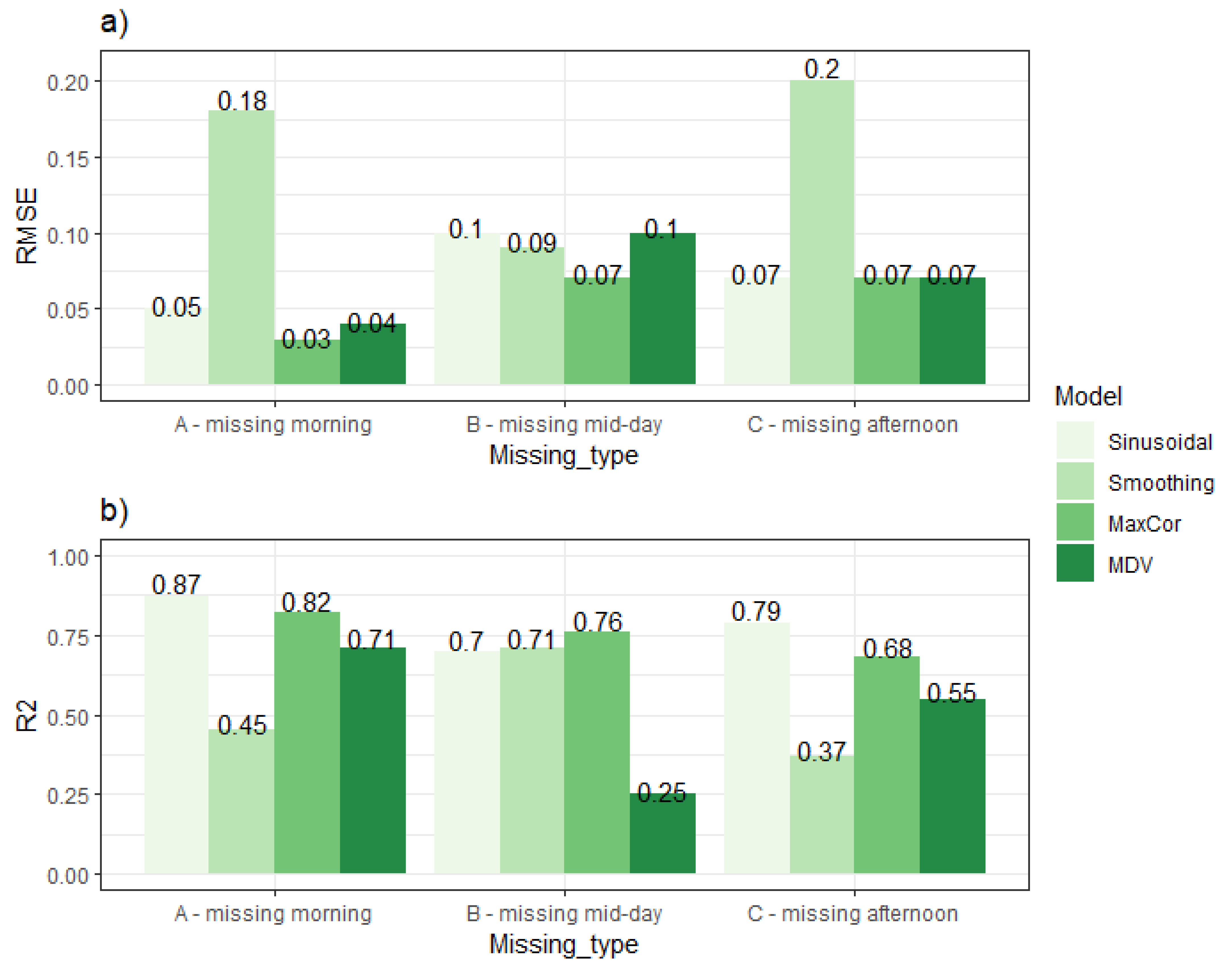
- A: with most missing data in the morning (sunrise to 10 a.m.);
- B: with most missing during mid-day (10 a.m. to 3 p.m.);
- C: with most missing during afternoon (3 p.m. to sunset).
2.3.2. Building the Training and Evaluation Datasets
- A training set (60%, 19 days); and
- An evaluation set (40%, 13 days).
2.3.3. Comparing the Model Infilling Performances
3. Results
4. Discussion
4.1. Performances of Gap-Filling Models
4.2. Recommendations for Practical Situations with Different Data Availability
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dingman, S.L. Physical Hydrology, 3rd ed.; Waveland Press: Long Grove, IL, USA, 2015. [Google Scholar]
- McMahon, T.A.; Peel, M.C.; Lowe, L.; Srikanthan, R.; McVicar, T.R. Estimating actual, potential, reference crop and pan evaporation using standard meteorological data: A pragmatic synthesis. Hydrol. Earth Syst. Sci. 2013, 17, 1331–1363. [Google Scholar] [CrossRef] [Green Version]
- Grafton, R.Q.; Williams, J.; Perry, C.J.; Molle, F.; Ringler, C.; Steduto, P.; Udall, B.; Wheeler, S.A.; Wang, Y.; Garrick, D.; et al. The paradox of irrigation efficiency. Science 2018, 361, 748–750. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boudhina, N.; Zitouna-Chebbi, R.; Mekki, I.; Jacob, F.; Ben Mechlia, N.; Masmoudi, M.; Prévot, L. Evaluating four gap-filling methods for eddy covariance measurements of evapotranspiration over hilly crop fields. Geosci. Instrum. Methods Data Syst. 2018, 7, 151–167. [Google Scholar] [CrossRef] [Green Version]
- Zitouna-Chebbi, R.; Prévot, L.; Chakhar, A.; Abdallah, M.M.-B.; Jacob, F. Observing Actual Evapotranspiration from Flux Tower Eddy Covariance Measurements within a Hilly Watershed: Case Study of the Kamech Site, Cap Bon Peninsula, Tunisia. Atmosphere 2018, 9, 68. [Google Scholar] [CrossRef] [Green Version]
- Pastorello, G.; Trotta, C.; Canfora, E.; Chu, H.; Christianson, D.; Cheah, Y.-W.; Poindexter, C.; Chen, J.; Elbashandy, A.; Humphrey, M.; et al. The FLUXNET2015 dataset and the ONEFlux processing pipeline for eddy covariance data. Sci. Data 2020, 7, 1–27. [Google Scholar] [CrossRef]
- Aubinet, M.; Vesala, T.; Papale, D. Eddy Covariance: A Practical Guide to Measurement and Data Analysis; Springer: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Wutzler, T.; Lucas-Moffat, A.; Migliavacca, M.; Knauer, J.; Sickel, K.; Šigut, L.; Menzer, O.; Reichstein, M. Basic and extensible post-processing of eddy covariance flux data with REddyProc. Biogeosciences 2018, 15, 5015–5030. [Google Scholar] [CrossRef] [Green Version]
- Alfieri, J.G.; Blanken, P.D.; Yates, D.N.; Steffen, K. Variability in the Environmental Factors Driving Evapotranspiration from a Grazed Rangeland during Severe Drought Conditions. J. Hydrometeorol. 2007, 8, 207–220. [Google Scholar] [CrossRef]
- Falge, E.; Baldocchi, D.; Olson, R.; Anthoni, P.; Aubinet, M.; Bernhofer, C.; Burba, G.; Ceulemans, R.J.; Clement, R.; Dolman, A.; et al. Gap filling strategies for defensible annual sums of net ecosystem exchange. Agric. For. Meteorol. 2001, 107, 43–69. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.-Y.; Chu, C.-R.; Li, M.-H. A gap-filling model for eddy covariance latent heat flux: Estimating evapotranspiration of a subtropical seasonal evergreen broad-leaved forest as an example. J. Hydrol. 2012, 468–469, 101–110. [Google Scholar] [CrossRef]
- Goodrich, J.; Wall, A.; Campbell, D.; Fletcher, D.; Wecking, A.; Schipper, L. Improved gap filling approach and uncertainty estimation for eddy covariance N2O fluxes. Agric. For. Meteorol. 2020, 297, 108280. [Google Scholar] [CrossRef]
- Cleverly, J.; Dahm, C.N.; Thibault, J.R.; Gilroy, D.J.; Coonrod, J.E.A. Seasonal estimates of actual evapo-transpiration from Tamarix ramosissima stands using three-dimensional eddy covariance. J. Arid Environ. 2002, 52, 181–197. [Google Scholar] [CrossRef] [Green Version]
- Alavi, N.; Warland, J.S.; Berg, A. Filling gaps in evapotranspiration measurements for water budget studies: Evaluation of a Kalman filtering approach. Agric. For. Meteorol. 2006, 141, 57–66. [Google Scholar] [CrossRef] [Green Version]
- Abudu, S.; Bawazir, A.S.; King, J.P. Infilling Missing Daily Evapotranspiration Data Using Neural Networks. J. Irrig. Drain. Eng. 2010, 136, 317–325. [Google Scholar] [CrossRef]
- Hoeltgebaum, L.E.B.; Dias, N.L.; Costa, M.A. An analog period method for gap-filling of latent heat flux measurements. Hydrol. Process. 2021, 35, e14105. [Google Scholar] [CrossRef]
- Moffat, A.M.; Papale, D.; Reichstein, M.; Hollinger, D.Y.; Richardson, A.D.; Barr, A.G.; Beckstein, C.; Braswell, B.; Churkina, G.; Desai, A.R.; et al. Comprehensive comparison of gap-filling techniques for eddy covariance net carbon fluxes. Agric. For. Meteorol. 2007, 147, 209–232. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Köppen-Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef] [Green Version]
- LI-COR Biosciences. EddyPro® Software (Version 7.0.8) [Computer Software]; LI-COR Biosciences: Lincoln, NE, USA, 2021; Available online: https://www.licor.com/env/support/EddyPro/software.html (accessed on 1 December 2021).
- LI-COR Biosciences. EddyPro® Software Version 7.0 Instruction Manual; LI-COR Biosciences: Lincoln, NE, USA, 2021; Available online: https://www.licor.com/documents/1ium2zmwm6hl36yz9bu4 (accessed on 1 December 2021).
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. FAO Irrigation and Drainage Paper No. 56; Food and Agriculture Organization of the United Nations: Rome, Italy, 1998; Volume 56, p. e156. [Google Scholar]
- Hocke, K.; Kämpfer, N. Gap filling and noise reduction of unevenly sampled data by means of the Lomb-Scargle periodogram. Atmos. Chem. Phys. 2009, 9, 4197–4206. [Google Scholar] [CrossRef] [Green Version]
- Santanello, J.A.; Friedl, M.A. Diurnal Covariation in Soil Heat Flux and Net Radiation. J. Appl. Meteorol. 2003, 42, 851–862. [Google Scholar] [CrossRef]
- Cha, M.; Li, M.; Wang, X. Estimation of Seasonal Evapotranspiration for Crops in Arid Regions Using Multisource Remote Sensing Images. Remote Sens. 2020, 12, 2398. [Google Scholar] [CrossRef]
- Pappas, C.; Papalexiou, S.M.; Koutsoyiannis, D. A quick gap filling of missing hydrometeorological data. J. Geophys. Res. Atmos. 2014, 119, 9290–9300. [Google Scholar] [CrossRef]
- Eamus, D.; Cleverly, J.; Boulain, N.; Grant, N.; Faux, R.; Villalobos-Vega, R. Carbon and water fluxes in an arid-zone Acacia savanna woodland: An analyses of seasonal patterns and responses to rainfall events. Agric. For. Meteorol. 2013, 182, 225–238. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, D.; Parehkar, A.; Ryu, D.; Wang, Q.J.; Western, A.W. Parsimonious Gap-Filling Models for Sub-Daily Actual Evapotranspiration Observations from Eddy-Covariance Systems. Remote Sens. 2022, 14, 1286. https://doi.org/10.3390/rs14051286
Guo D, Parehkar A, Ryu D, Wang QJ, Western AW. Parsimonious Gap-Filling Models for Sub-Daily Actual Evapotranspiration Observations from Eddy-Covariance Systems. Remote Sensing. 2022; 14(5):1286. https://doi.org/10.3390/rs14051286
Chicago/Turabian StyleGuo, Danlu, Arash Parehkar, Dongryeol Ryu, Quan J. Wang, and Andrew W. Western. 2022. "Parsimonious Gap-Filling Models for Sub-Daily Actual Evapotranspiration Observations from Eddy-Covariance Systems" Remote Sensing 14, no. 5: 1286. https://doi.org/10.3390/rs14051286
APA StyleGuo, D., Parehkar, A., Ryu, D., Wang, Q. J., & Western, A. W. (2022). Parsimonious Gap-Filling Models for Sub-Daily Actual Evapotranspiration Observations from Eddy-Covariance Systems. Remote Sensing, 14(5), 1286. https://doi.org/10.3390/rs14051286