
Underwater Hyperspectral Imaging of Arctic Macroalgal Habitats during the Polar Night Using a Novel Mini-ROV-UHI Portable System

 , , , ,
, , , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
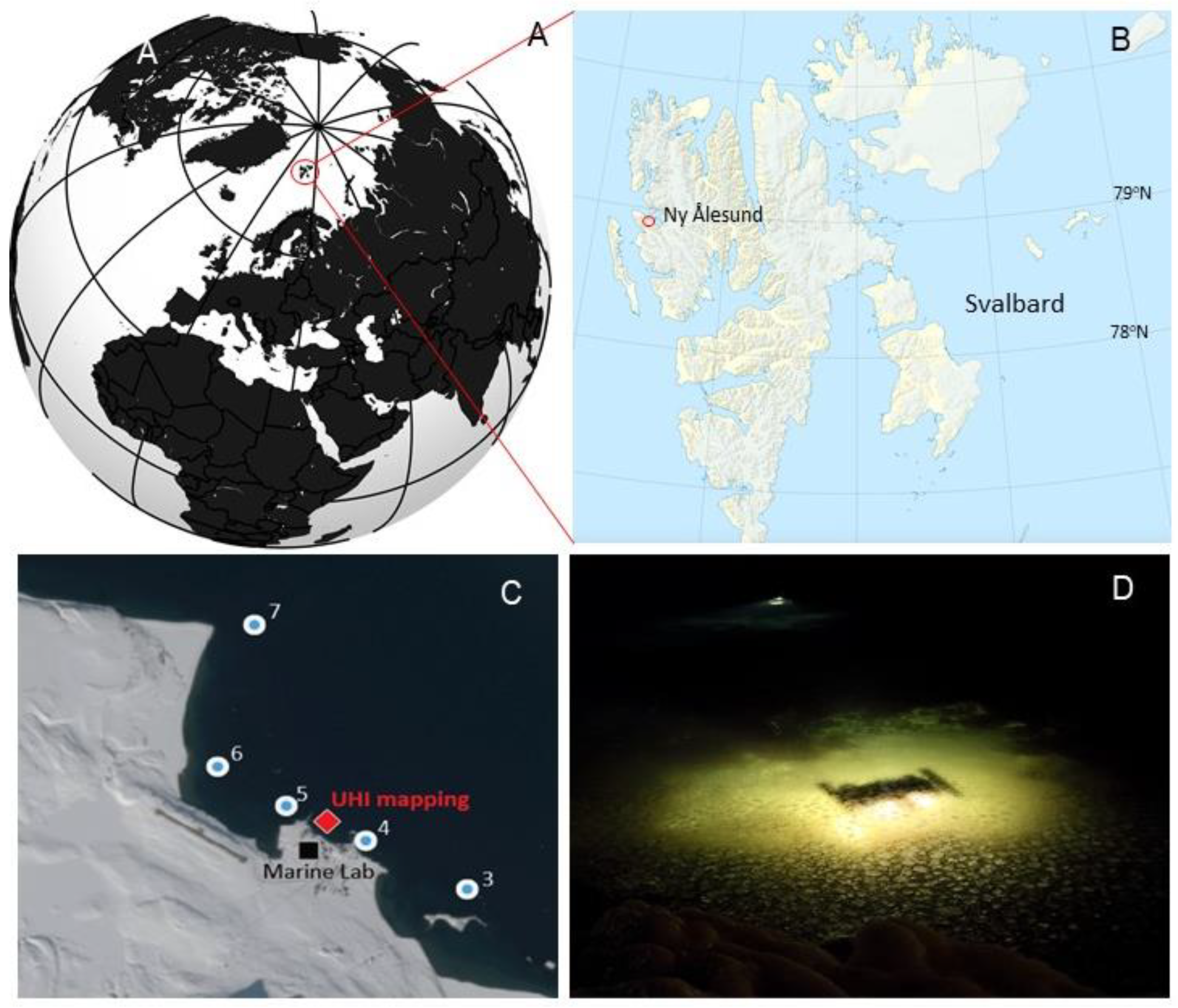
2.1. Study Area
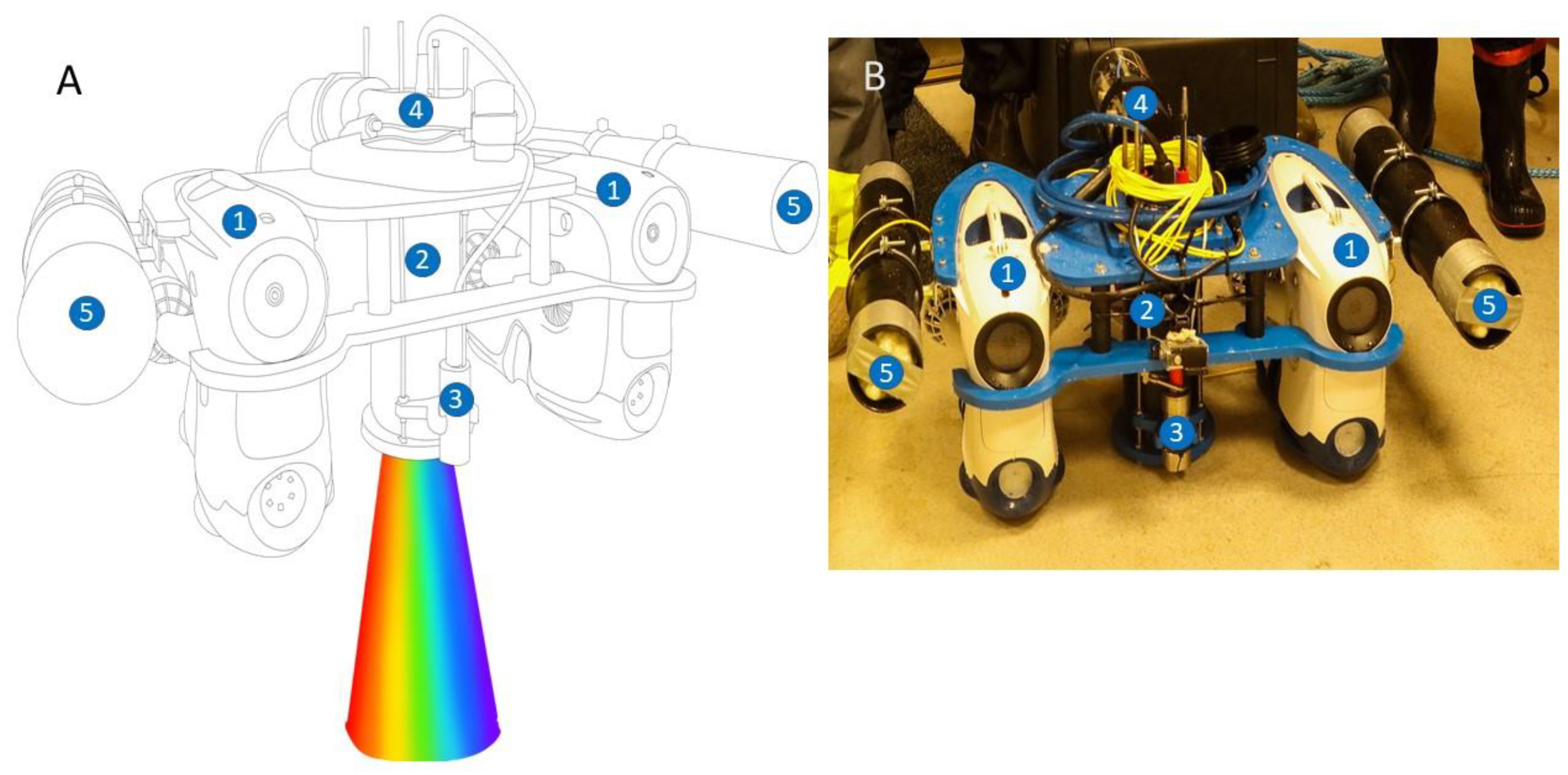
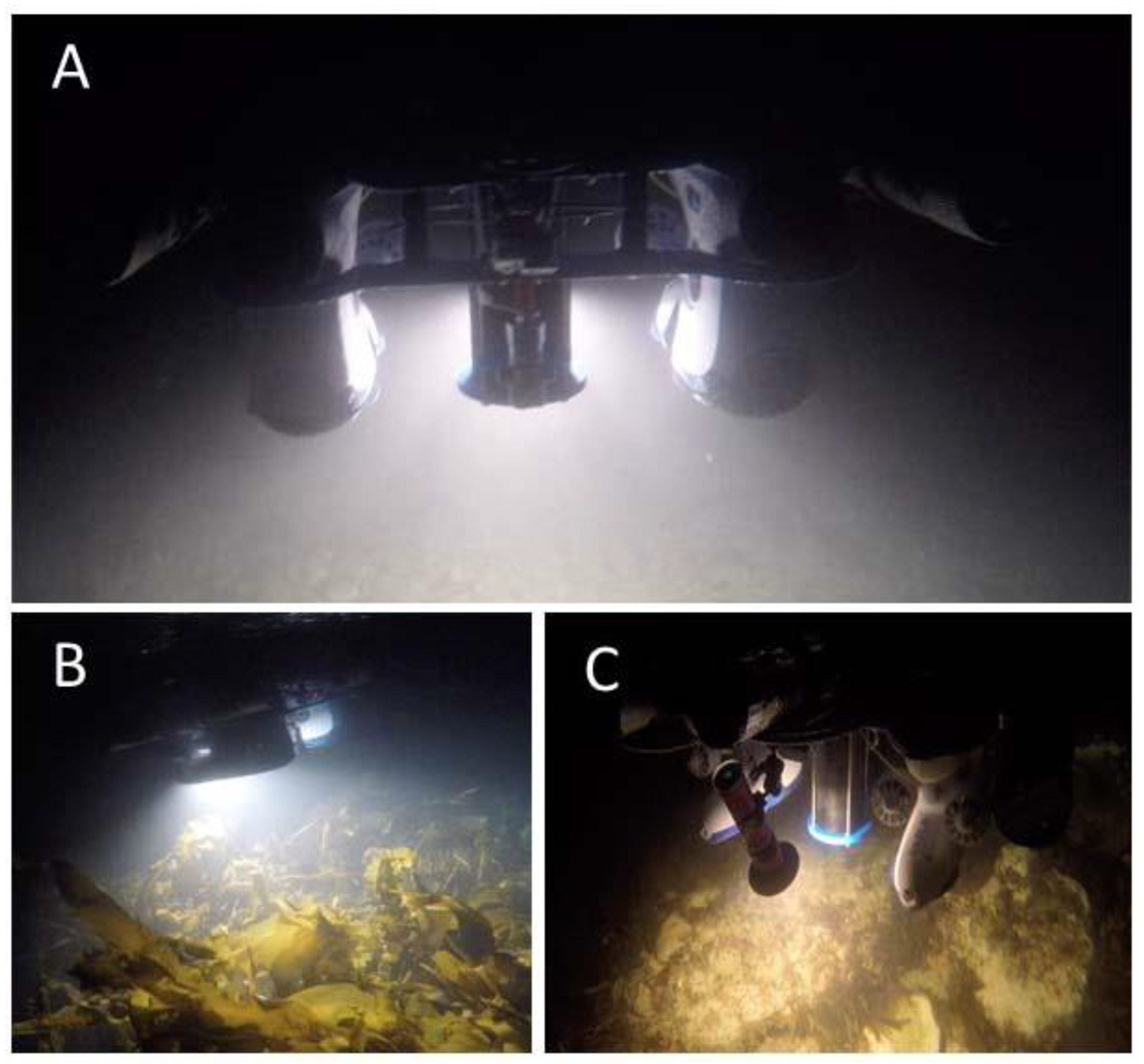
2.2. Mini ROV Platform as UHI Carrier
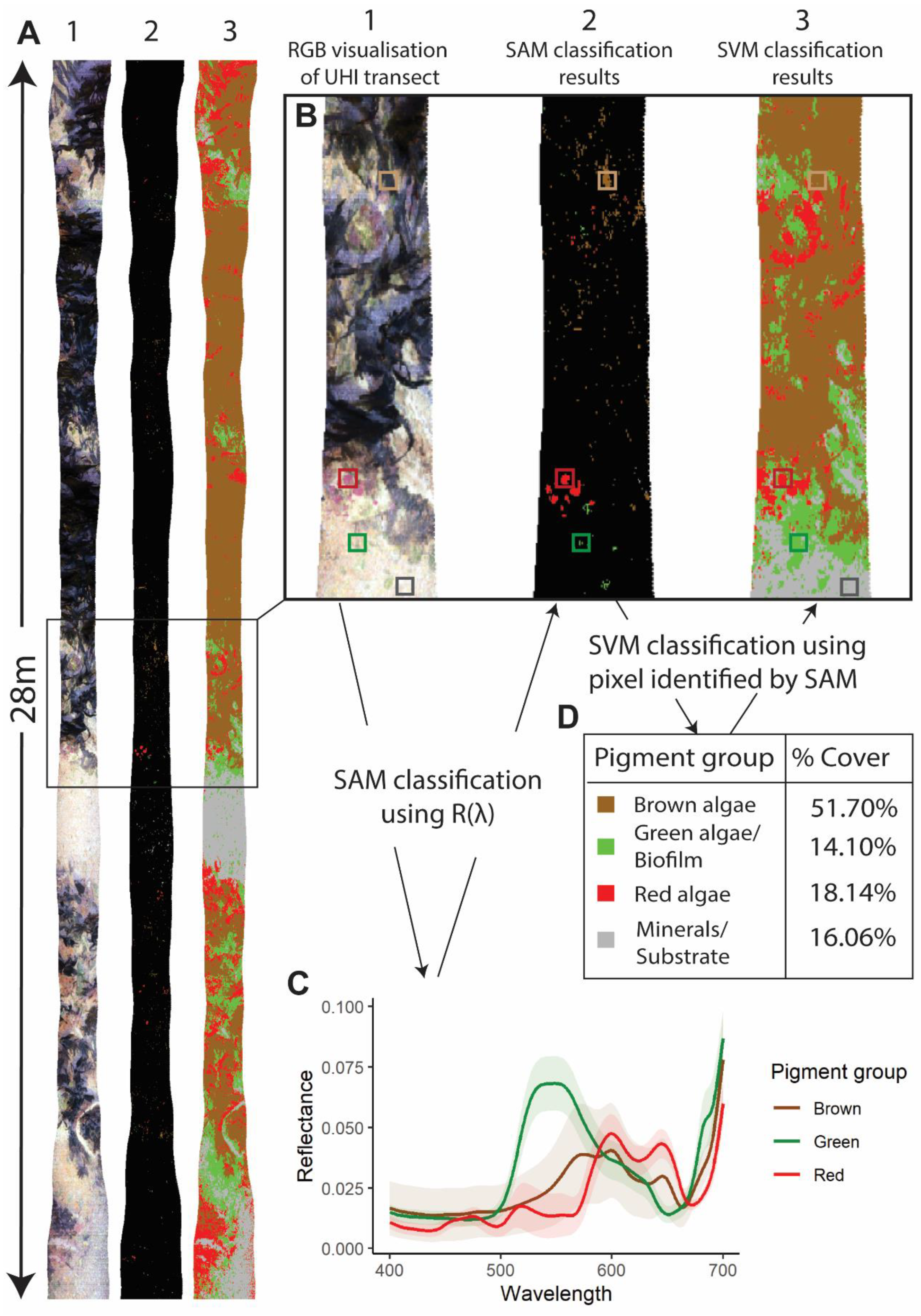
2.3. Classification of UHI Data
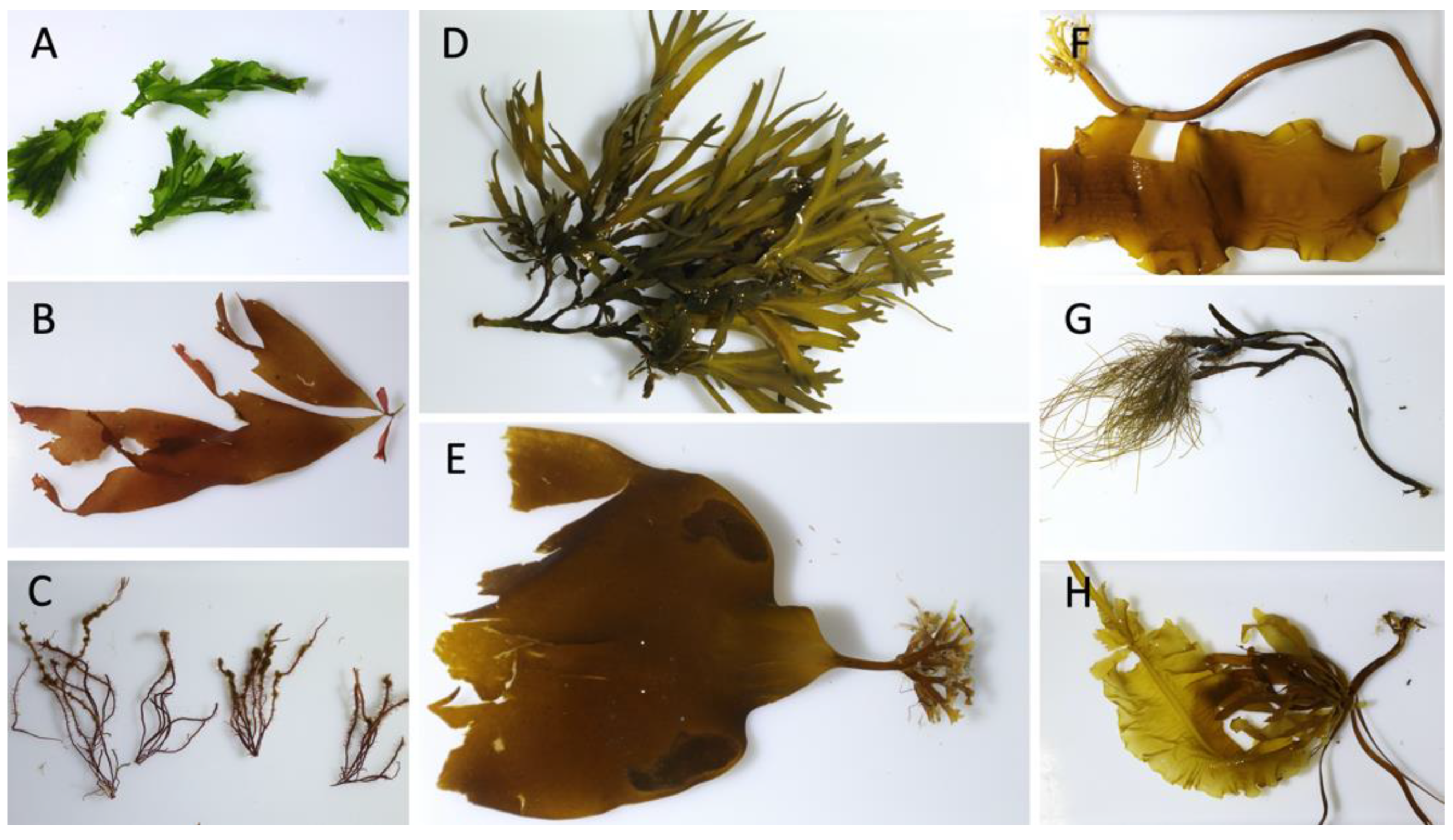
2.4. Ground-Truthing
3. Results
4. Discussion
4.1. ROV-UHI Macroalgal Habitat Mapping during the Polar Night
4.2. In Vivo Bio-Optical Characteristics of Macroalgae
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Johnsen, G.; Volent, Z.; Dierssen, H.; Pettersen, R.; Van Ardelan, M.; Søreide, F.; Fearns, P.; Ludvigsen, M.; Moline, M. Underwater hyperspectral imagery to create biogeochemical maps of seafloor properties. In Subsea Optics and Imaging; Woodhead Publishing: Sawston, UK, 2013; pp. 508–535. ISBN 9780857093417. [Google Scholar]
- Chennu, A.; Färber, P.; Volkenborn, N.; Al-Najjar, M.A.A.; Janssen, F.; de Beer, D.; Polerecky, L. Hyperspectral imaging of the microscale distribution and dynamics of microphytobenthos in intertidal sediments. Limnol. Oceanogr. Methods 2013, 11, 511–528. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Liu, Z.; Men, S.; Li, Y.; Ding, Z.; He, J.; Zhao, Z. Underwater Hyperspectral Imaging Technology and Its Applications for Detecting and Mapping the Seafloor: A Review. Sensors 2020, 20, 4962. [Google Scholar] [CrossRef] [PubMed]
- Montes-Herrera, J.C.; Cimoli, E.; Cummings, V.; Hill, N.; Lucieer, A.; Lucieer, V. Underwater hyperspectral imaging (UHI): A review of systems and applications for proximal seafloor ecosystem studies. Remote Sens. 2021, 13, 3451. [Google Scholar] [CrossRef]
- Johnsen, G.; Ludvigsen, M.; Sørensen, A.; Sandvik Aas, L.M. The use of underwater hyperspectral imaging deployed on remotely operated vehicles—methods and applications. IFAC-PapersOnLine 2016, 49, 476–481. [Google Scholar] [CrossRef]
- Dumke, I.; Ludvigsen, M.; Ellefmo, S.L.; Søreide, F.; Johnsen, G.; Murton, B.J. Underwater Hyperspectral Imaging Using a Stationary Platform in the Trans-Atlantic Geotraverse Hydrothermal Field. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2947–2962. [Google Scholar] [CrossRef] [Green Version]
- Johnsen, G.; Mogstad, A.A.; Berge, J.; Cohen, J.H. Operative habitat mapping and monitoring in the polar night. In Polar Night Marine Ecology: Life and Light in the Dead of Night; Berge, J., Johnsen, G., Cohen, J.H., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 277–305. ISBN 978-3-030-33208-2. [Google Scholar]
- Mogstad, A.A.; Johnsen, G. Spectral characteristics of coralline algae: A multi-instrumental approach, with emphasis on underwater hyperspectral imaging. Appl. Opt. 2017, 56, 9957. [Google Scholar] [CrossRef]
- Dumke, I.; Nornes, S.M.; Purser, A.; Marcon, Y.; Ludvigsen, M.; Ellefmo, S.L.; Johnsen, G.; Søreide, F. First hyperspectral imaging survey of the deep seafloor: High-resolution mapping of manganese nodules. Remote Sens. Environ. 2018, 209, 19–30. [Google Scholar] [CrossRef]
- Ødegård, Ø.; Mogstad, A.A.; Johnsen, G.; Sørensen, A.J.; Ludvigsen, M. Underwater hyperspectral imaging: A new tool for marine archaeology. Appl. Opt. 2018, 57, 3214. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sture, Ø.; Ludvigsen, M.; Søreide, F.; Aas, L.M.S. Autonomous underwater vehicles as a platform for underwater hyperspectral imaging. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–8. [Google Scholar]
- Mogstad, A.A.; Johnsen, G.; Ludvigsen, M. Shallow-water habitat mapping using Underwater Hyperspectral Imaging from an Unmanned Surface Vehicle: A pilot study. Remote Sens. 2019, 11, 685. [Google Scholar] [CrossRef]
- Volent, Z.; Johnsen, G.; Sigernes, F. Kelp forest mapping by use of airborne hyperspectral imager. J. Appl. Remote Sens. 2007, 1, 011503. [Google Scholar] [CrossRef]
- Johnsen, G.; Zolich, A.; Grant, S.; Bjørgum, R.; Cohen, J.H.; McKee, D.; Kopec, T.P.; Vogedes, D.; Berge, J. All-sky camera system providing high temporal resolution annual time series of irradiance in the Arctic. Appl. Opt. 2021, 60, 6456. [Google Scholar] [CrossRef] [PubMed]
- Johnsen, G.; Leu, E.; Gradinger, R. Marine micro- and macroalgae in the polar night. In Polar Night Marine Ecology: Life and Light in the Dead of Night; Berge, J., Johnsen, G., Cohen, J.H., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 67–112. ISBN 978-3-030-33208-2. [Google Scholar]
- Fredriksen, S.; Karsten, U.; Bartsch, I.; Woelfel, J.; Koblowsky, M.; Schumann, R.; Moy, S.R.; Steneck, R.S.; Wiktor, J.M.; Hop, H.; et al. Biodiversity of benthic macro- and microalgae from svalbard with special focus on kongsfjorden. In The Ecosystem of Kongsfjorden, Svalbard; Hop, H., Wiencke, C., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 331–371. ISBN 978-3-319-46425-1. [Google Scholar]
- Pavlov, A.K.; Leu, E.; Hanelt, D.; Bartsch, I.; Karsten, U.; Hudson, S.R.; Gallet, J.-C.; Cottier, F.; Cohen, J.H.; Berge, J.; et al. The underwater light climate in Kongsfjorden and its ecological implications. In The Ecosystem of Kongsfjorden, Svalbard; Hop, H., Wiencke, C., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 137–170. ISBN 978-3-319-46425-1. [Google Scholar]
- Sørensen, A.J. Testination north. In Whither the Arctic Ocean? Research, Knowledge Needs and Development en Route to the New Arctic; Paul, W., Ed.; Fundacion BBVA: Bilbao, Spain, 2021; pp. 165–175. ISBN 978-84-92937-82-0. [Google Scholar]
- Lovas, H.S.; Sorensen, A.J.; Ludvigsen, M. Framework for combining multiple lightweight underwater vehicles into super underwater vehicle. In Proceedings of the 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), St. Johns, NL, Canada, 30 September–2 October 2020. [Google Scholar] [CrossRef]
- Lovas, H.S.; Mogstad, A.A.; Sorensen, A.J.; Johnsen, G. A Methodology for Consistent Georegistration in Underwater Hyperspectral Imaging. IEEE J. Ocean. Eng. 2021, 1–19. [Google Scholar] [CrossRef]
- Meyer, D.; Dimitriadou, E.; Hornik, K.; Weingessel, A.; Leisch, F. e1071: Misc Functions of the Department of Statistics, Probability Theory Group (Formerly: E1071). TU Wien. R Package Version 1.7-1. Available online: https://CRAN.R-project.org/package=e (accessed on 31 January 2022).
- Grzymski, J.; Johnsen, G.; Sakshaug, E. The significance of intracellular self-shading on the biooptical properties of brown, red, and green macroalgae. J. Phycol. 1997, 33, 408–414. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Summers, N.; Johnsen, G.; Mogstad, A.; Løvås, H.; Fragoso, G.; Berge, J. Underwater Hyperspectral Imaging of Arctic Macroalgal Habitats during the Polar Night Using a Novel Mini-ROV-UHI Portable System. Remote Sens. 2022, 14, 1325. https://doi.org/10.3390/rs14061325
Summers N, Johnsen G, Mogstad A, Løvås H, Fragoso G, Berge J. Underwater Hyperspectral Imaging of Arctic Macroalgal Habitats during the Polar Night Using a Novel Mini-ROV-UHI Portable System. Remote Sensing. 2022; 14(6):1325. https://doi.org/10.3390/rs14061325
Chicago/Turabian StyleSummers, Natalie, Geir Johnsen, Aksel Mogstad, Håvard Løvås, Glaucia Fragoso, and Jørgen Berge. 2022. "Underwater Hyperspectral Imaging of Arctic Macroalgal Habitats during the Polar Night Using a Novel Mini-ROV-UHI Portable System" Remote Sensing 14, no. 6: 1325. https://doi.org/10.3390/rs14061325
APA StyleSummers, N., Johnsen, G., Mogstad, A., Løvås, H., Fragoso, G., & Berge, J. (2022). Underwater Hyperspectral Imaging of Arctic Macroalgal Habitats during the Polar Night Using a Novel Mini-ROV-UHI Portable System. Remote Sensing, 14(6), 1325. https://doi.org/10.3390/rs14061325