
Rapid Inspection of Large Concrete Floor Flatness Using Wheeled Robot with Aided-INS

 , ,
, ,  ,
,
Abstract
:1. Introduction
- (1)
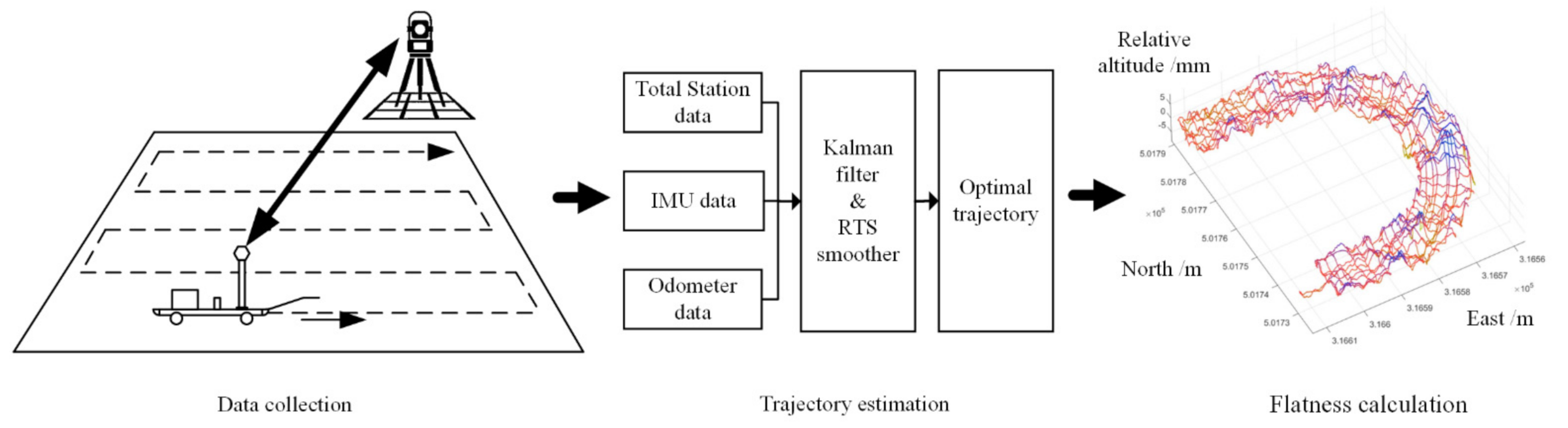
- A rapid measurement method of floor flatness based on the fusion of INS, odometers and total station is proposed, which is suitable for high-precision and rapid inspection of large floors.
- (2)
- We designed a high-precision wheeled robot for rapid floor flatness inspection. We also introduced the multiple sensors integrated method and estimated the measurement accuracy of the robot.
- (3)
- Laboratory tests and engineering applications for the National Speed Skating Oval of the 2022 Beijing Winter Olympics have verified the effectiveness of the proposed method.
2. Methods
2.1. Overview
2.2. Wheeled Robot for Flatness Inspection
2.2.1. System Design
- (1)
- Assuming that the acceleration bias is and the gravity is g, the initial error of the pitch angle is calculated as follows:
- (2)
- Assuming that the robot’s movement speed is 1 m/s and the inspection baseline is 5 m long, the integral error of horizontal angle caused by gyroscope is calculated as follows:
- (3)
- Therefore, the horizontal angle error on each survey line section is calculated as follows:
- (4)
- Assuming that the inspection baseline is 5 m, the relative height difference accuracy is calculated as follows:
2.2.2. Robot Implementation and Multiple Sensors Integration
2.3. Data Processing
2.3.1. Motion Trajectory Estimation
2.3.2. Flatness Calculation and Analysis
3. Results
3.1. Wheeled Robot Performance Testing
3.1.1. Repeatability of Relative Height Measurement
3.1.2. Accuracy of Relative Height Measurement
3.2. Flatness Inspection for National Speed Skating Oval
3.2.1. Measurement Route Planning
3.2.2. Measurement Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- General Administration of Sport of China. Technical Requirements and Test Methods for Natural Material Sports Field Part 3: Ice Rink; Standards Press of China: Beijing, China, 2006. [Google Scholar]
- Kim, M.-K.; Wang, Q.; Li, H. Non-Contact Sensing Based Geometric Quality Assessment of Buildings and Civil Structures: A Review. Autom. Constr. 2019, 100, 163–179. [Google Scholar] [CrossRef]
- British Standards Institution (BSI). BS 8204—Screeds, Bases and In Situ Flooring; BSI: London, UK, 2009. [Google Scholar]
- Henry, R.S.; Ingham, J.M. Field Measurements of Concrete Floor Surface Regularity. In Proceedings of the The New Zealand Concrete Industry Conference, Wellington, New Zealand, 7–9 October 2010; p. 9. [Google Scholar]
- ASTM International. ASTM E 1155-96-Standard Test Method for Determining FF Floor Flatness and FL Floor Levelness Numbers; American Concrete Institute: Detroit, MI, USA, 2001; Volume 4.11. [Google Scholar]
- American Concrete Institute (ACI). Specification for Tolerances for Concrete Construction and Materials and Commentary; American Concrete Institute: Farmington Hills, MI, USA, 2010. [Google Scholar]
- Steffey, D.; Uriz, P.; Osteraas, J. Using ASTM E1155 to Determine Finished Floor Quality: Minimum Sampling Requirements Used to Establish Compliant Floor Flatness and Levelness. In Forensic Engineering; American Society of Civil Engineers: San Francisco, CA, USA, 2012; pp. 605–612. [Google Scholar]
- Kangas, M.A. Concrete Screeding System with Floor Quality Feedback/Control. U.S. Patent 9,835,610, 2017. [Google Scholar]
- Hutchinson, T.C.; Chen, Z. Improved Image Analysis for Evaluating Concrete Damage. J. Comput. Civ. Eng. 2006, 20, 210–216. [Google Scholar] [CrossRef]
- Zhu, Z.; Brilakis, I. Machine Vision-Based Concrete Surface Quality Assessment. J. Constr. Eng. Manag. 2010, 136, 210–218. [Google Scholar] [CrossRef]
- Nuikka, M.; Rönnholm, P.; Kaartinen, H.; Kukko, A.; Suominen, A.; Salo, P.; Pöntinen, P.; Hyyppä, H.; Hyyppä, J.; Haggrén, H.; et al. Comparison of Three Accurate 3D Measurement Methods for Evaluating As-Built Floor Flatness. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, B5, 129–134. [Google Scholar]
- Tang, P.; Huber, D.; Akinci, B. Characterization of Laser Scanners and Algorithms for Detecting Flatness Defects on Concrete Surfaces. J. Comput. Civ. Eng. 2011, 25, 31–42. [Google Scholar] [CrossRef]
- Bosché, F.; Guenet, E. Automating Surface Flatness Control Using Terrestrial Laser Scanning and Building Information Models. Autom. Constr. 2014, 44, 212–226. [Google Scholar] [CrossRef]
- Li, D.; Liu, J.; Feng, L.; Zhou, Y.; Liu, P.; Chen, Y.F. Terrestrial Laser Scanning Assisted Flatness Quality Assessment for Two Different Types of Concrete Surfaces. Measurement 2020, 154, 107436. [Google Scholar] [CrossRef]
- Kim, M.-K.; Thedja, J.P.P.; Wang, Q. Automated Dimensional Quality Assessment for Formwork and Rebar of Reinforced Concrete Components Using 3D Point Cloud Data. Autom. Constr. 2020, 112, 103077. [Google Scholar] [CrossRef]
- Li, F.; Li, H.; Kim, M.-K.; Lo, K.-C. Laser Scanning Based Surface Flatness Measurement Using Flat Mirrors for Enhancing Scan Coverage Range. Remote Sens. 2021, 13, 714. [Google Scholar] [CrossRef]
- Niu, X.; Chen, Q.; Kuang, J.; Liu, J. Return of Inertial Surveying-Trend or Illusion? In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 165–169. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multi-Sensor Integrated Navigation Systems; Artech House: Boston, MA, USA; London, UK, 2008; ISBN 978-1-58053-255-6. [Google Scholar]
- Leica Nova TS60-World’s Most Accurate Total Station. Available online: https://leica-geosystems.com/products/total-stations/robotic-total-stations/leica-nova-ts60 (accessed on 2 January 2022).
- Särkkä, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013; ISBN 1-107-03065-X. [Google Scholar]
- Knapp, C.; Carter, G. The Generalized Correlation Method for Estimation of Time Delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef] [Green Version]
- Shin, E.-H. Estimation Techniques for Low-Cost Inertial Navigation; Doctor: Calgary, AB, Canada, 2005. [Google Scholar]
- Dissanayake, G.; Sukkarieh, S.; Nebot, E.; Durrant-Whyte, H. The Aiding of a Low-Cost Strapdown Inertial Measurement Unit Using Vehicle Model Constraints for Land Vehicle Applications. IEEE Trans. Robot. Autom. 2001, 17, 731–747. [Google Scholar] [CrossRef] [Green Version]
- Trimble DiNi Level|Digital Levels|Trimble Geospatial. Available online: https://geospatial.trimble.com/products-and-solutions/trimble-dini-level (accessed on 27 January 2022).
- LI, J.; Xu, H.; Tang, C. Key technology of dynamic high-precision construction measurement in National Speed Skating Oval and its application. Bull. Surv. Mapp. 2021, 8, 123–128. [Google Scholar] [CrossRef]
- National Speed Skating Oval Aims to Produce “Fastest” Ice for Skaters at Beijing 2022. Available online: https://www.beijing2022.cn/wog.htm?cmsid=MHI2021111500663300 (accessed on 27 January 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| INS | Gyroscope | Accelerometer | Odometer | Total Station | ||
|---|---|---|---|---|---|---|
| Sampling Rate | 500 hz | 500 hz | Sampling Rate | 500 hz | Sampling Rate | <10 hz |
| Range | ±220°/s | ±5 g | Angular resolution | 17 bits, 131,072 | Measurement range | 1000 m |
| Noise | ≤0.002°/ | 30 μg/ | Static error | <0.025° | Distance Accuracy | 1 ppm + 0.6 mm |
| Bias | 0.01°/h (1) | ≤15 μg (1) | Maximum operational speed | 4000 rpm | Angel accuracy | 0.5″ |
| Check Points | Relative Height by Leveling/m | Relative Height by Wheeled Robot/m | Difference/mm | ||
|---|---|---|---|---|---|
| Test 1 | Test 2 | Test1 | Test2 | ||
| CTL01 | 0.0000 | 0.0000 | 0.0000 | 0.0 | 0.0 |
| CTL02 | −0.0162 | −0.0169 | −0.0165 | −0.7 | −0.3 |
| CTL03 | −0.0204 | −0.0216 | −0.0198 | −1.2 | 0.6 |
| CTL04 | −0.0182 | −0.0174 | −0.0179 | 0.8 | 0.3 |
| CTL05 | −0.0049 | −0.0058 | −0.0067 | −0.9 | −1.8 |
| CTL06 | −0.0240 | −0.0231 | −0.0234 | 0.9 | 0.6 |
| CTL07 | −0.0346 | −0.0330 | −0.0329 | 1.6 | 1.7 |
| CTL08 | −0.0363 | −0.0380 | −0.0357 | −1.7 | 0.6 |
| CTL09 | −0.0360 | −0.0379 | −0.0358 | −1.9 | 0.2 |
| CTL10 | −0.0266 | −0.0281 | −0.0259 | −1.5 | 0.7 |
| CTL11 | −0.0388 | −0.0400 | −0.0379 | −1.2 | 0.9 |
| CTL12 | −0.0444 | −0.0464 | −0.0428 | −2.0 | 1.6 |
| CTL13 | −0.0485 | −0.0499 | −0.0477 | −1.4 | 0.8 |
| CTL14 | −0.0417 | −0.0439 | −0.0409 | −2.2 | 0.8 |
| CTL15 | −0.0325 | −0.0334 | −0.0318 | −0.9 | 0.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Li, Q.; Xue, W.; Zhang, D.; Xiong, S.; Yin, Y.; Lv, S. Rapid Inspection of Large Concrete Floor Flatness Using Wheeled Robot with Aided-INS. Remote Sens. 2022, 14, 1528. https://doi.org/10.3390/rs14071528
Chen Z, Li Q, Xue W, Zhang D, Xiong S, Yin Y, Lv S. Rapid Inspection of Large Concrete Floor Flatness Using Wheeled Robot with Aided-INS. Remote Sensing. 2022; 14(7):1528. https://doi.org/10.3390/rs14071528
Chicago/Turabian StyleChen, Zhipeng, Qingquan Li, Weixin Xue, Dejin Zhang, Siting Xiong, Yu Yin, and Shiwang Lv. 2022. "Rapid Inspection of Large Concrete Floor Flatness Using Wheeled Robot with Aided-INS" Remote Sensing 14, no. 7: 1528. https://doi.org/10.3390/rs14071528
APA StyleChen, Z., Li, Q., Xue, W., Zhang, D., Xiong, S., Yin, Y., & Lv, S. (2022). Rapid Inspection of Large Concrete Floor Flatness Using Wheeled Robot with Aided-INS. Remote Sensing, 14(7), 1528. https://doi.org/10.3390/rs14071528