

Field Verification of Vehicle-Mounted All-Fiber Coherent Wind Measurement Lidar Based on Four-Beam Vertical Azimuth Display Scanning
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data Acquisition System and Parameters
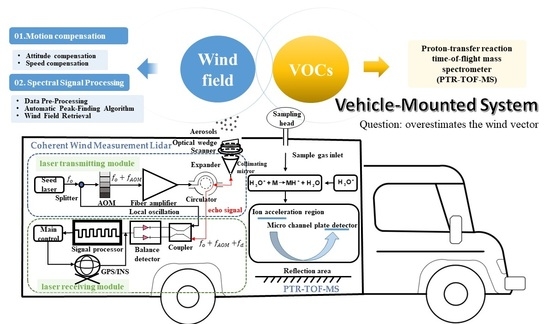
2.1.1. All-Fiber Coherent Wind Measurement Lidar
2.1.2. Proton Transfer Reaction Time-of-Flight Mass Spectrometer
2.2. Motion Compensation
2.2.1. Defining the Three-Dimensional Coordinate System
2.2.2. Attitude Compensation
2.2.3. Speed Compensation
2.3. Spectral Signal Processing
2.3.1. Data Pre-Processing
2.3.2. Automatic Peak-Finding Algorithm
2.3.3. Wind Field Retrieval
3. Results and Discussion
3.1. Sampling Sites and Sample Collection
3.2. Calibration Test
3.3. Contrasting Observations
3.4. Continuous Observation Experiment
3.4.1. Characteristics of Atmospheric Wind Fields in Different Functional Areas
3.4.2. Pollution Characteristics of VOCs at Different Functional Areas
3.4.3. The Connection between Wind Fields and VOCs
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gupta, N.; Bhaskaran, P.K.; Dash, M.K. Recent trends in wind-wave climate for the Indian Ocean. Curr. Sci. 2015, 108, 2191–2201. [Google Scholar]
- Xu, H.; Wang, W.-Y. A Method Based on Numerical Wind Field and Extreme Learning Machine for Typhoon Wind Speed Prediction of Wind Farm. Math. Probl. Eng. 2021, 2021, 7147973. [Google Scholar] [CrossRef]
- Chan, P.; Shun, C.; Wu, K. Operational LIDAR-based system for automatic windshear alerting at the Hong Kong International Airport. In Proceedings of the 12th Conference on Aviation, Range, and Aerospace Meteorology, Atlanta, GA, USA, 27 January–3 February 2006. [Google Scholar]
- Karthikeya, B.; Negi, P.S.; Srikanth, N. Wind resource assessment for urban renewable energy application in Singapore. Renew. Energy 2016, 87, 403–414. [Google Scholar] [CrossRef]
- Morris, L. Second-generation LIDAR boosts wind power. Power Eng. 2011, 115, 50–54. [Google Scholar]
- Rothermel, J.; Olivier, L.D.; Banta, R.M.; Hardesty, R.M.; Howell, J.N.; Cutten, D.R.; Johnson, S.C.; Menzies, R.T.; Tratt, D.M. Remote sensing of multi-level wind fields with high-energy airborne scanning coherent Doppler lidar. Opt. Express 1998, 2, 40–50. [Google Scholar] [CrossRef] [PubMed]
- Kavaya, M.J.; Henderson, S.W.; Magee, J.R.; Hale, C.P.; Huffaker, R.M. Remote wind profiling with a solid-state Nd: YAG coherent lidar system. Opt. Lett. 1989, 14, 776–778. [Google Scholar] [CrossRef] [PubMed]
- Diao, W.; Zhang, X.; Liu, J.; Zhu, X.; Liu, Y.; Bi, D.; Chen, W. All fiber pulsed coherent lidar development for wind profiles measurements in boundary layers. Chin. Opt. Lett. 2014, 12, 072801. [Google Scholar] [CrossRef] [Green Version]
- Kameyama, S.; Ando, T.; Asaka, K.; Hirano, Y.; Wadaka, S. Compact all-fiber pulsed coherent Doppler lidar system for wind sensing. Appl. Opt. 2007, 46, 1953–1962. [Google Scholar] [CrossRef]
- Huffaker, R.M. Laser Doppler detection systems for gas velocity measurement. Appl. Opt. 1970, 9, 1026–1039. [Google Scholar] [CrossRef] [PubMed]
- Henderson, S.W.; Suni, P.J.; Hale, C.P.; Hannon, S.M.; Magee, J.R.; Bruns, D.L.; Yuen, E.H. Coherent laser radar at 2 mu m using solid-state lasers. IEEE Trans. Geosci. Remote Sens. 1993, 31, 4–15. [Google Scholar] [CrossRef]
- Asaka, K.; Yanagisawa, T.; Hirano, Y. 1.5-um eye-safe coherent lidar system for wind velocity measurement. In Lidar Remote Sensing for Industry and Environment Monitoring; SPIE: Bellingham, WA, USA, 2001; pp. 321–328. [Google Scholar]
- Chen, X.; Dai, G.; Wu, S.; Liu, J.; Yin, B.; Wang, Q.; Zhang, Z.; Qin, S.; Wang, X. Coherent high-spectral-resolution lidar for the measurement of the atmospheric Mie–Rayleigh–Brillouin backscatter spectrum. Opt. Express 2022, 30, 38060–38076. [Google Scholar] [CrossRef] [PubMed]
- Shao, J.; Zhang, J.; Wang, W.; Zhang, S.; Yu, T.; Dong, W. Occurrence frequency of Kelvin-Helmholtz instability assessed by global high-resolution radiosonde and ERA5 reanalysis. Atmos. Chem. Phys. Discuss. 2023, 2023, 1–41. [Google Scholar] [CrossRef]
- Lee, S.H.; Williams, P.D.; Frame, T.H.A. Increased shear in the North Atlantic upper-level jet stream over the past four decades. Nature 2019, 572, 639–642. [Google Scholar] [CrossRef] [Green Version]
- Sathe, A.; Mann, J.; Vasiljevic, N.; Lea, G. A six-beam method to measure turbulence statistics using ground-based wind lidars. Atmos. Meas. Tech. 2015, 8, 729–740. [Google Scholar] [CrossRef] [Green Version]
- Lane, S.; Barlow, J.F.; Wood, C.R. An assessment of a three-beam Doppler lidar wind profiling method for use in urban areas. J. Wind Eng. Ind. Aerodyn. 2013, 119, 53–59. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.-H.; Zhang, Y.-K.; Zhou, J.; Chen, Y.; Zhang, G.-J.; Zhou, D.-F.; Chen, C.-L.; Hu, Y.-H.; Luo, X.; Feng, Z.-Z. Real-time wind field measurements using all-fiber mobile Doppler wind lidar. Opt. Eng. 2020, 59, 034107. [Google Scholar] [CrossRef]
- Protat, A.; McRobert, I. Three-dimensional wind profiles using a stabilized shipborne cloud radar in wind profiler mode. Atmos. Meas. Tech. 2020, 13, 3609–3620. [Google Scholar] [CrossRef]
- Zhai, X.; Wu, S.; Liu, B.; Song, X.; Yin, J. Shipborne Wind Measurement and Motion-induced Error Correction of a Coherent Doppler Lidar over the Yellow Sea in 2014. Atmos. Meas. Tech. 2018, 11, 1313–1331. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Li, Z.; Liu, Z. Horizontal wind velocity retrieval using a Levenberg–Marquardt algorithm for an airborne wind lidar. J. Appl. Remote Sens. 2016, 10, 026009. [Google Scholar] [CrossRef]
- Gasch, P.; Wieser, A.; Lundquist, J.K.; Kalthoff, N. An LES-based airborne Doppler lidar simulator and its application to wind profiling in inhomogeneous flow conditions. Atmos. Meas. Tech. 2020, 13, 1609–1631. [Google Scholar] [CrossRef] [Green Version]
- Achtert, P.; Brooks, I.; Brooks, B.; Moat, B.; Prytherch, J.; Persson, P.; Tjernström, M. Measurement of wind profiles by motion-stabilised shipborne Doppler lidar. Atmos. Meas. Tech. 2015, 8, 4993–5007. [Google Scholar] [CrossRef] [Green Version]
- Kelberlau, F.; Neshaug, V.; Lønseth, L.; Bracchi, T.; Mann, J. Taking the motion out of floating Lidar: Turbulence intensity estimates with a continuous-wave wind lidar. Remote Sens. 2020, 12, 898. [Google Scholar] [CrossRef] [Green Version]
- Kotake, N.; Sakamaki, H.; Imaki, M.; Miwa, Y.; Ando, T.; Yabugaki, Y.; Enjo, M.; Kameyama, S. Intelligent and compact coherent Doppler lidar with fiber-based configuration for robust wind sensing in various atmospheric and environmental conditions. Opt. Express 2022, 30, 20038–20062. [Google Scholar] [CrossRef]
- Richardson, S.D. Environmental mass spectrometry: Emerging contaminants and current issues. Anal. Chem. 2008, 80, 4373–4402. [Google Scholar] [CrossRef] [PubMed]
- Biasioli, F.; Yeretzian, C.; Märk, T.D.; Dewulf, J.; Van Langenhove, H. Direct-injection mass spectrometry adds the time dimension to (B) VOC analysis. TrAC Trends Anal. Chem. 2011, 30, 1003–1017. [Google Scholar] [CrossRef]
- Jin, S.; Li, J.; Han, H.; Wang, H.; Chu, Y.; Zhou, S. Proton transfer reaction mass spectrometry for online detection of trace volatile organic compounds. Prog. Chem. 2007, 19, 996. [Google Scholar]
- Xue-Fang, Z.; Yi-Xiang, D. Proton Transfer Reaction-Mass Spectrometry for Online Analysis of Trace Volatile Organic Compounds. Chin. J. Anal. Chem. 2011, 39, 1611–1618. [Google Scholar]
- Zhao, Y.F.; Zhang, X.J.; Zhang, Y.R.; Ding, J.X.; Wang, K.; Gao, Y.H.; Su, R.S.; Fang, J. Data Processing and Analysis of Eight-Beam Wind Profile Coherent Wind Measurement Lidar. Remote Sens. 2021, 13, 3549. [Google Scholar] [CrossRef]
- Manninen, A.J.; Marke, T.; Tuononen, M.; O’Connor, E.J. Atmospheric Boundary Layer Classification With Doppler Lidar. J. Geophys. Res.-Atmos. 2018, 123, 8172–8189. [Google Scholar] [CrossRef]
- Wang, X.; Cai, Y.; Wang, J.; Zhao, Y. Concentration monitoring of volatile organic compounds and ozone in Xi’an based on PTR-TOF-MS and differential absorption lidar. Atmos. Environ. 2021, 245, 118045. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, Q.; Zhou, W.; Zou, X.; Wang, H.; Huang, C.; Shen, C.; Chu, Y. Detection of ketones by a novel technology: Dipolar proton transfer reaction mass spectrometry (DP-PTR-MS). J. Am. Soc. Mass Spectrom. 2017, 28, 873–879. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Zhang, R. Proton transfer reaction rate constants between hydronium ion (H3O+) and volatile organic compounds. Atmos. Environ. 2004, 38, 2177–2185. [Google Scholar] [CrossRef]
- Salcedo-Bosch, A.; Rocadenbosch, F.; Sospedra, J. A robust adaptive unscented kalman filter for floating doppler wind-lidar motion correction. Remote Sens. 2021, 13, 4167. [Google Scholar] [CrossRef]
- Savage, P.G. Strapdown inertial navigation integration algorithm design part 1: Attitude algorithms. J. Guid. Control Dyn. 1998, 21, 19–28. [Google Scholar] [CrossRef]
- Savage, P.G. Strapdown inertial navigation integration algorithm design part 2: Velocity and position algorithms. J. Guid. Control Dyn. 1998, 21, 208–221. [Google Scholar] [CrossRef]
- Salonen, K.; Järvinen, H.; Eresmaa, R.; Niemelä, S. Bias estimation of Doppler-radar radial-wind observations. Q. J. R. Meteorol. Soc. A J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2007, 133, 1501–1507. [Google Scholar] [CrossRef]
- Lin, R.Q.; Guo, P.; Chen, H.; Chen, S.Y.; Zhang, Y.C. Smoothed accumulated spectra based wDSWF method for real-time wind vector estimation of pulsed coherent Doppler lidar. Opt. Express 2022, 30, 180–194. [Google Scholar] [CrossRef]
- Scholkmann, F.; Boss, J.; Wolf, M. An Efficient Algorithm for Automatic Peak Detection in Noisy Periodic and Quasi-Periodic Signals. Algorithms 2012, 5, 588–603. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Wu, S.; Wang, Q.; Liu, B.; Yin, B.; Zhai, X. Airport low-level wind shear lidar observation at Beijing Capital International Airport. Infrared Phys. Technol. 2019, 96, 113–122. [Google Scholar] [CrossRef] [Green Version]
- Abdelazim, S.; Santoro, D.; Arend, M.; Moshary, F.; Ahmed, S. A hardware implemented autocorrelation technique for estimating power SPectral density for processing signals from a Doppler wind Lidar system. Sensors 2018, 18, 4170. [Google Scholar] [CrossRef] [Green Version]
- Frehlich, R.; Kelley, N. Measurements of Wind and Turbulence Profiles With Scanning Doppler Lidar for Wind Energy Applications. Ieee J. Sel. Top. Appl. Earth Obs. Remote Sens. 2008, 1, 42–47. [Google Scholar] [CrossRef]
- Yu, Y.; Wen, S.; Lü, H.; Feng, Y.; Wang, X.; Sheng, G.; Fu, J. Characteristics of atmospheric carbonyls and VOCs in Forest Park in South China. Environ. Monit. Assess. 2008, 137, 275–285. [Google Scholar] [CrossRef] [PubMed]
- Ling, Z.; Guo, H.; Chen, G.; Lam, S.H.M.; Fan, S. Formaldehyde and acetaldehyde at different elevations in mountainous areas in Hong Kong. Aerosol Air Qual. Res. 2016, 16, 1868–1878. [Google Scholar] [CrossRef] [Green Version]
- Dumanoglu, Y.; Kara, M.; Altiok, H.; Odabasi, M.; Elbir, T.; Bayram, A. Spatial and seasonal variation and source apportionment of volatile organic compounds (VOCs) in a heavily industrialized region. Atmos. Environ. 2014, 98, 168–178. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Qualification | Specification |
|---|---|---|
| Transmitter | Wavelength | 1.55 µm |
| Pulse energy | 145 μJ | |
| Pulse repetition | 10 kHz | |
| Pulse width | 400 ns | |
| AOM frequency | 80 MHz | |
| Transceiver | Laser mode | Pulse |
| Scan mode | Conical | |
| Elevation angle | 60° | |
| Start angle | 0° | |
| Step angle | 90° | |
| Data acquisition | Sampling frequency | 1 GHz |
| Sampling points | 400 | |
| Range resolution | 60 m | |
| Blind range | 60 m | |
| Gate number | 128 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, Q.; Wang, Y.; Fang, J.; Zhao, Y. Field Verification of Vehicle-Mounted All-Fiber Coherent Wind Measurement Lidar Based on Four-Beam Vertical Azimuth Display Scanning. Remote Sens. 2023, 15, 3377. https://doi.org/10.3390/rs15133377
Zhang X, Li Q, Wang Y, Fang J, Zhao Y. Field Verification of Vehicle-Mounted All-Fiber Coherent Wind Measurement Lidar Based on Four-Beam Vertical Azimuth Display Scanning. Remote Sensing. 2023; 15(13):3377. https://doi.org/10.3390/rs15133377
Chicago/Turabian StyleZhang, Xiaojie, Qingsong Li, Yujie Wang, Jing Fang, and Yuefeng Zhao. 2023. "Field Verification of Vehicle-Mounted All-Fiber Coherent Wind Measurement Lidar Based on Four-Beam Vertical Azimuth Display Scanning" Remote Sensing 15, no. 13: 3377. https://doi.org/10.3390/rs15133377
APA StyleZhang, X., Li, Q., Wang, Y., Fang, J., & Zhao, Y. (2023). Field Verification of Vehicle-Mounted All-Fiber Coherent Wind Measurement Lidar Based on Four-Beam Vertical Azimuth Display Scanning. Remote Sensing, 15(13), 3377. https://doi.org/10.3390/rs15133377