


A New Approach toward Corner Detection for Use in Point Cloud Registration


Abstract
:1. Introduction
- (1)
- The definition of the corner point is the intersection of three planes. Both plane/corner detection techniques are included in this study.
- (2)
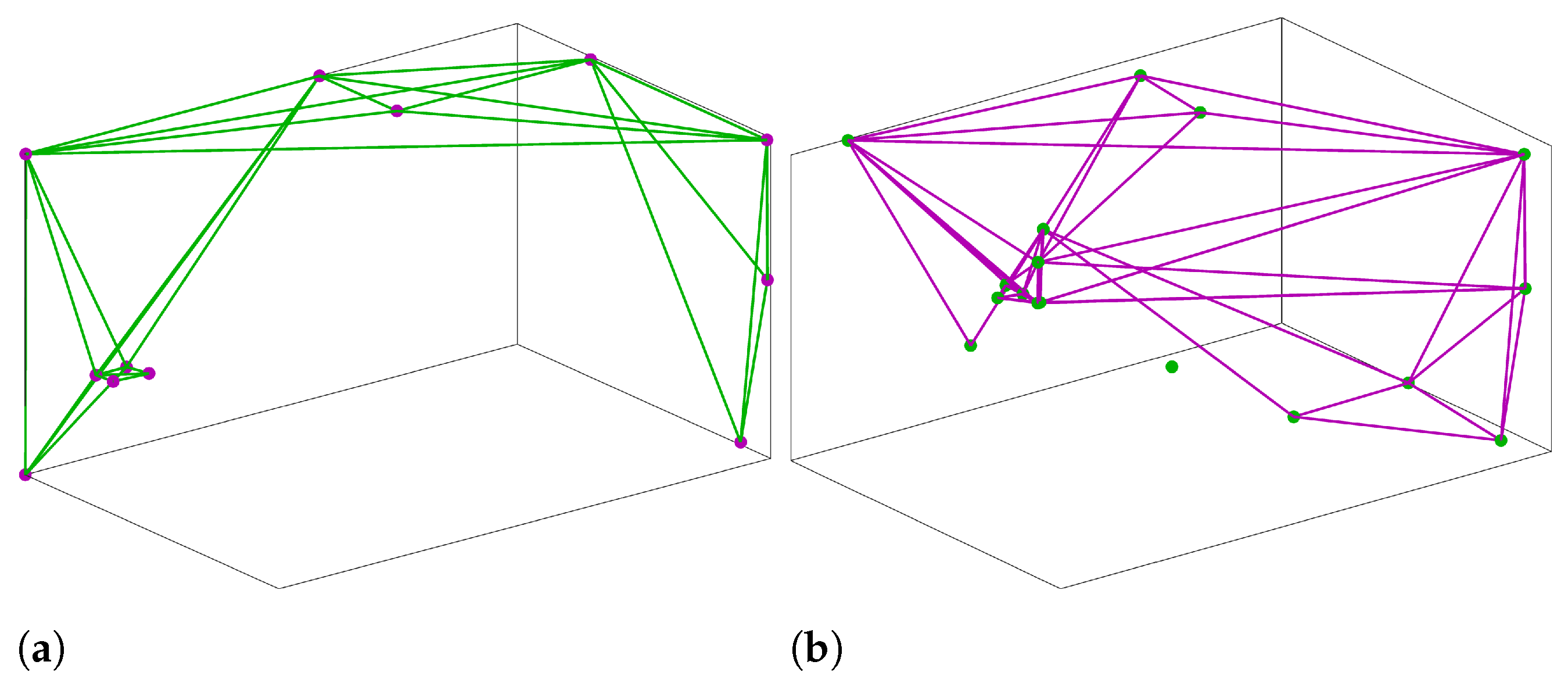
- A new way of constructing graphs is proposed. The corners are regarded as the vertices and the sharing planes as the edge. Meanwhile, both the distance and angle between linked vertices are taken into account when calculating the affinity matrix. The correspondence is determined using a graph-matching algorithm.
- (3)
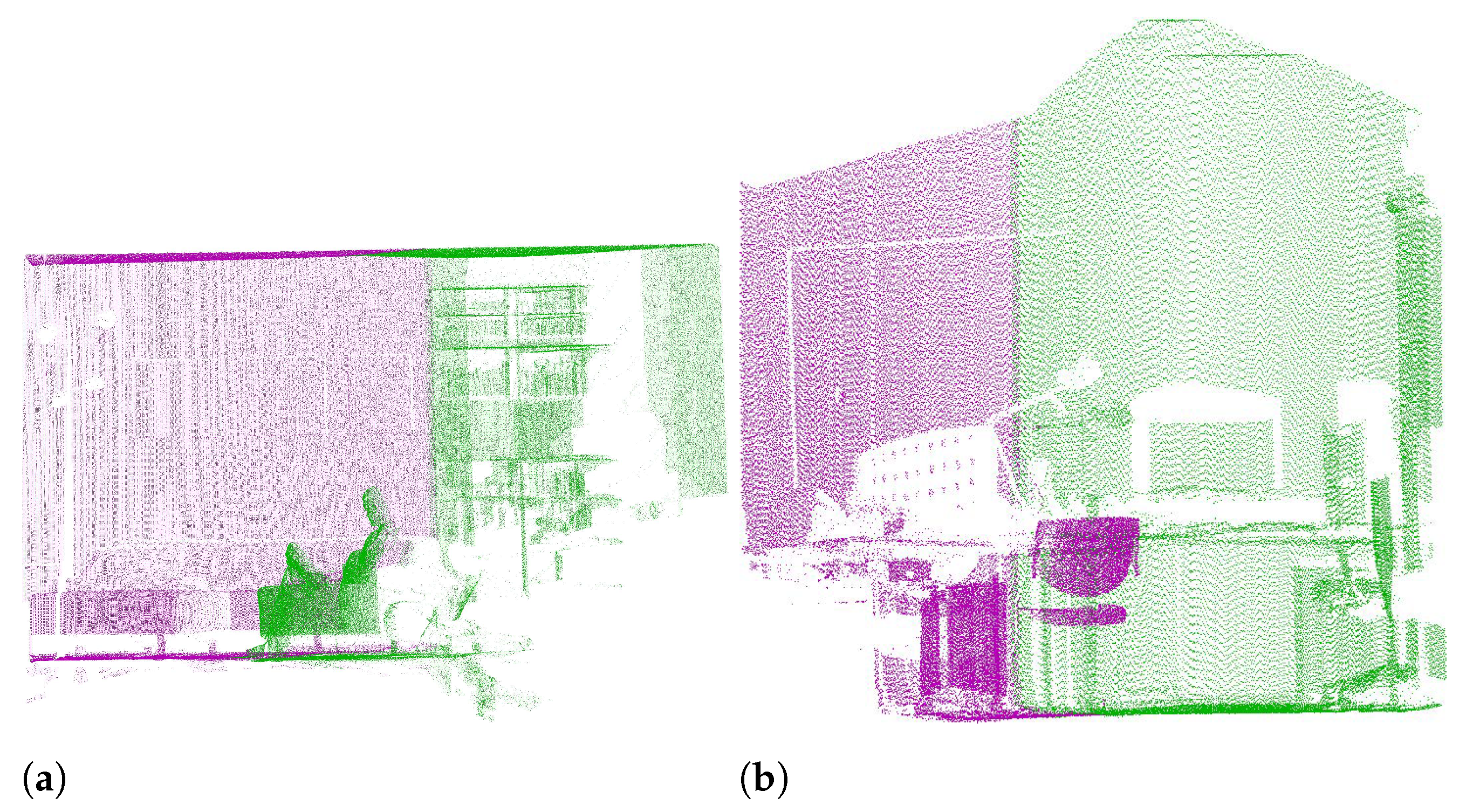
- Our method is robust to outliers/noise and can align point clouds that have only a small overlap.
2. Related Work
3. Methodology
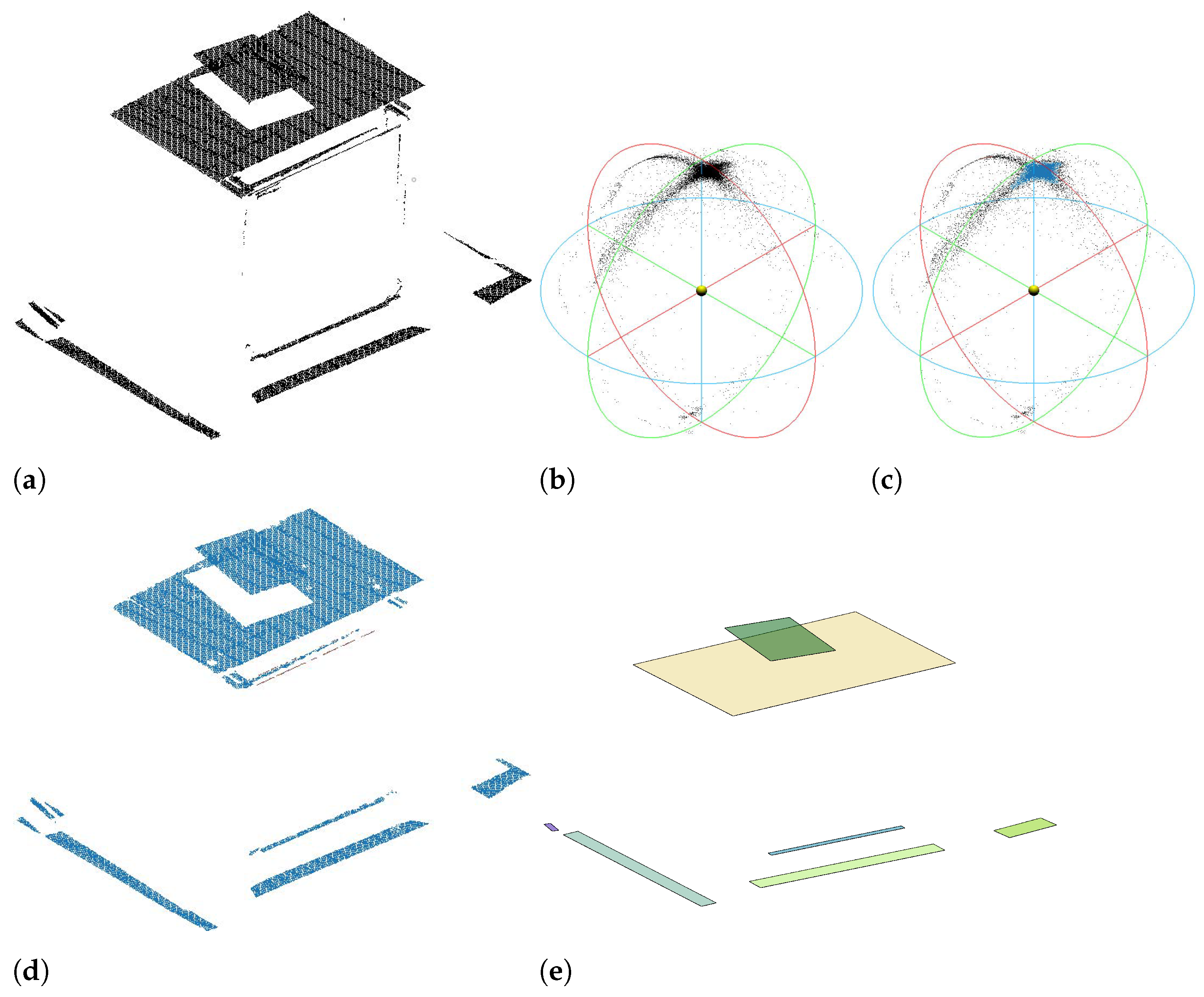
3.1. Plane Detection
3.1.1. Gaussian Sphere
3.1.2. Plane Detection
- Core: If , then p is core points. All points in are grouped into the same cluster.
- Border: If a point q has been grouped into a cluster but is not a core point, then it is a border point.
- Noise: If a point q is neither a core point nor a border point, then it is a noise point.
| Algorithm 1: Plane detection by DBSCAN |
 |
| Algorithm 2: fitPlanePCA(P) |
Input: Colanar points: Output: Model of plane: , ▹ Normalization; ▹ Calculating covariance matrix; ▹ Basis of feature space; ▹ Projecting P into feature space; , , , , ▹ The vertices are A, B, C, and D; ▹ Re-projecting vertices into Euclidean space; return |
3.2. Corner Detection
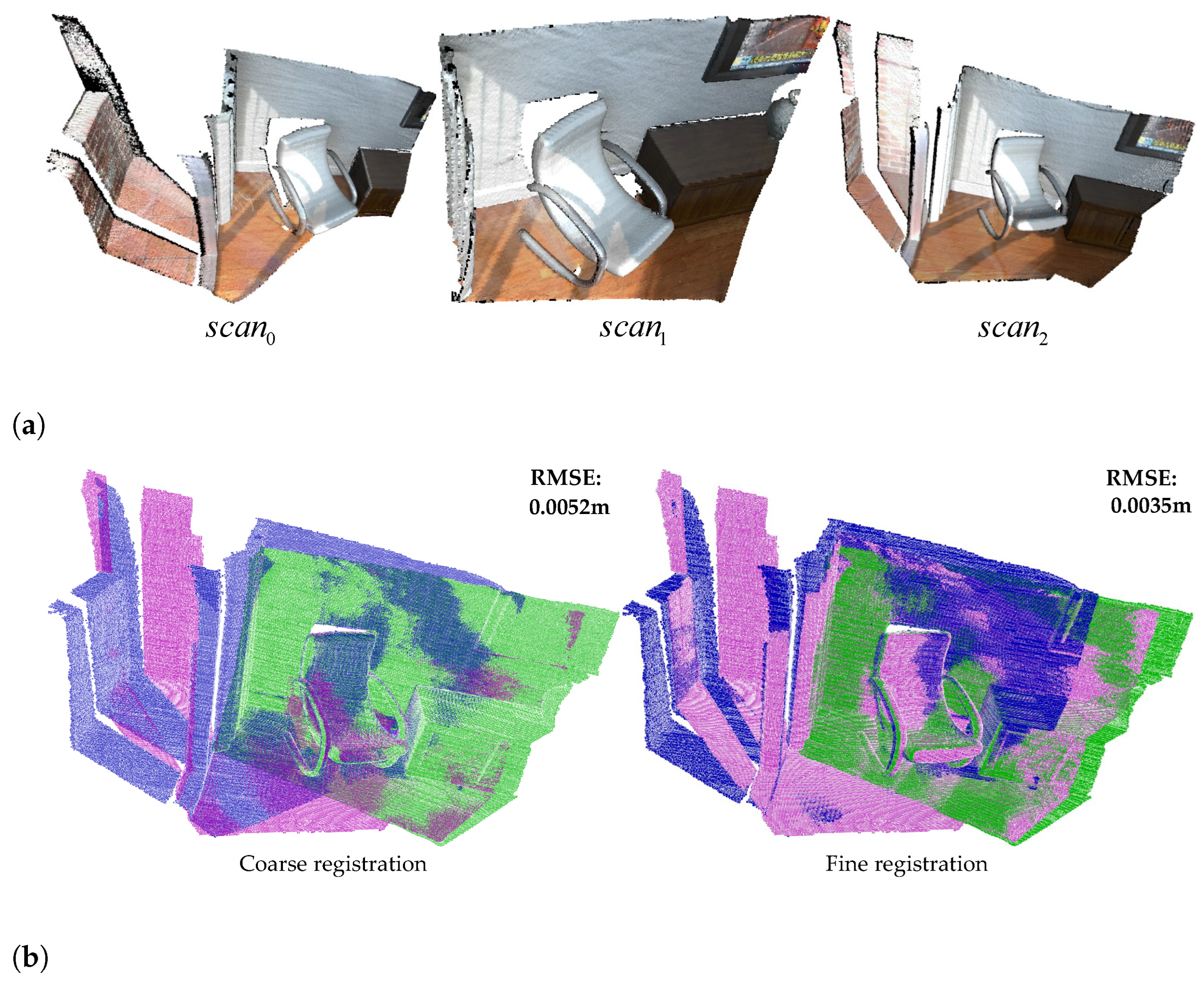
3.3. Registration
| Algorithm 3: Corner detection |
 |
- (1)
- The corner points are centralized by , , where , , and k is the number of matched corner points;
- (2)
- The covariance matrix is calculated by ;
- (3)
- SVD (singular value decomposition) is performed on , which can be written as . The rotation matrix is ;
- (4)
- Finally, translation can be calculated by .
4. Materials and Evaluation
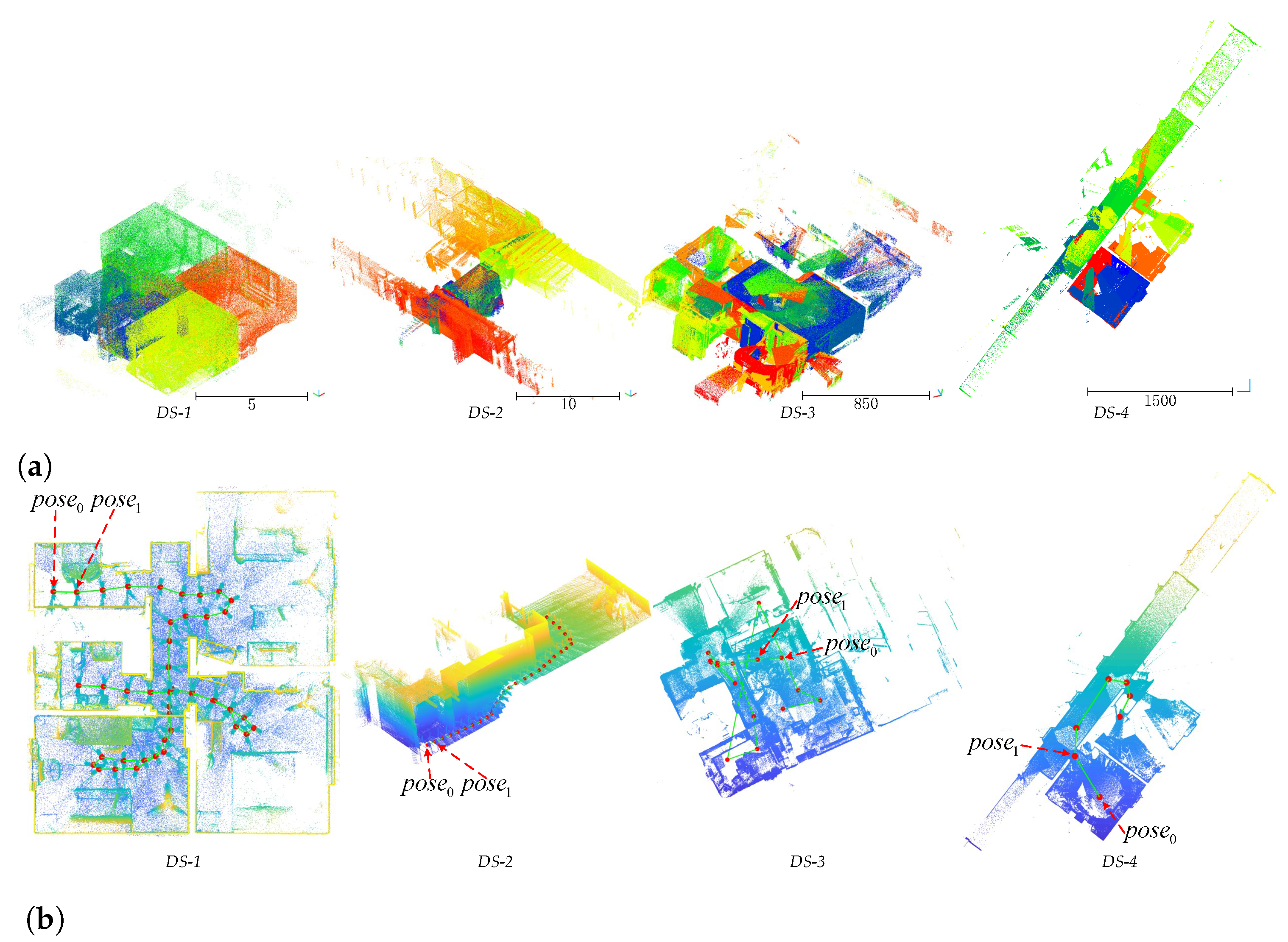
4.1. Datasets
4.2. Evaluation
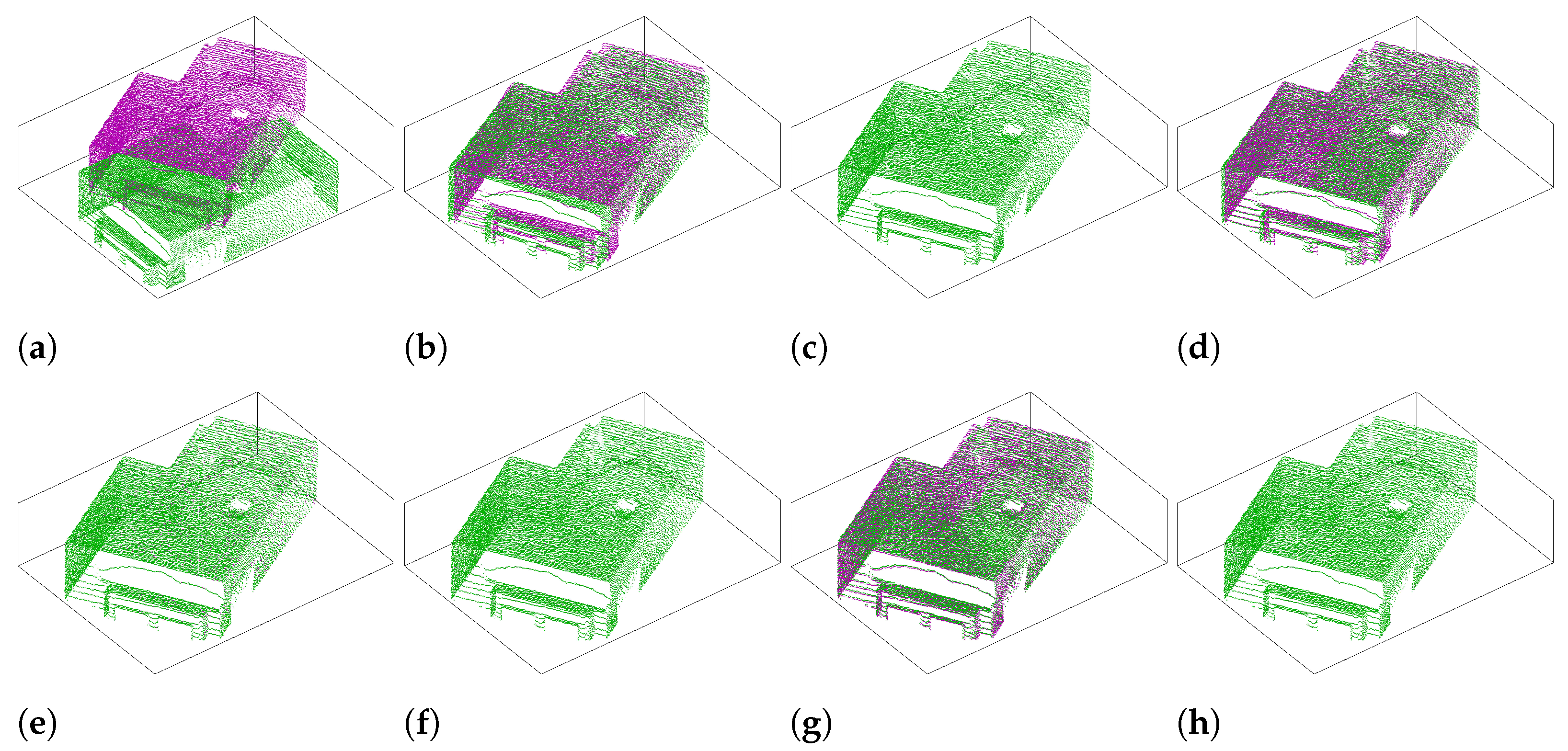
5. Results
6. Discussion
7. Conclusions
- (1)
- Low overlap: Because it aligns the corners defined on the geometric level rather than the real point cloud in the rough alignment stage.
- (2)
- Fast: The number of corners is limited, so it is very fast to align them. Most of the time is spent on plane detection.
- (3)
- Robust: It can process various point clouds acquired by different sensors.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, P.; Chen, J.; Cho, Y.K. SLAM-driven robotic mapping and registration of 3D point clouds. Autom. Constr. 2018, 89, 38–48. [Google Scholar] [CrossRef]
- Wu, Y.; Li, Y.; Li, W.; Li, H.; Lu, R. Robust LiDAR-based localization scheme for unmanned ground vehicle via multisensor fusion. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 5633–5643. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Yu, L.; Hou, J.; Fei, S. Automatic reconstruction method for large scene based on multi-site point cloud stitching. Measurement 2019, 131, 590–596. [Google Scholar] [CrossRef]
- Fu, Y.; Lei, Y.; Wang, T.; Patel, P.; Jani, A.B.; Mao, H.; Curran, W.J.; Liu, T.; Yang, X. Biomechanically constrained non-rigid MR-TRUS prostate registration using deep learning based 3D point cloud matching. Med. Image Anal. 2021, 67, 101845. [Google Scholar] [CrossRef] [PubMed]
- Tam, G.K.; Cheng, Z.Q.; Lai, Y.K.; Langbein, F.C.; Liu, Y.; Marshall, D.; Martin, R.R.; Sun, X.F.; Rosin, P.L. Registration of 3D point clouds and meshes: A survey from rigid to nonrigid. IEEE Trans. Vis. Comput. Graph. 2012, 19, 1199–1217. [Google Scholar] [CrossRef] [Green Version]
- Tombari, F.; Salti, S.; Di Stefano, L. Performance evaluation of 3D keypoint detectors. Int. J. Comput. Vis. 2013, 102, 198–220. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Grant, D.; Bethel, J.; Crawford, M. Point-to-plane registration of terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2012, 72, 16–26. [Google Scholar] [CrossRef]
- Bouaziz, S.; Tagliasacchi, A.; Pauly, M. Sparse Iterative Closest Point. Comput. Graph. Forum 2013, 32, 113–123. [Google Scholar] [CrossRef] [Green Version]
- Rusinkiewicz, S. A symmetric objective function for ICP. ACM Trans. Graph. 2019, 38, 1–7. [Google Scholar] [CrossRef]
- Sanchez, J.; Denis, F.; Checchin, P.; Dupont, F.; Trassoudaine, L. Global registration of 3D LiDAR point clouds based on scene features: Application to structured environments. Remote Sens. 2017, 9, 1014. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Nan, L.; Xia, R.; Zhao, J.; Wonka, P. PLADE: A plane-based descriptor for point cloud registration with small overlap. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2530–2540. [Google Scholar] [CrossRef]
- Du, J.; Wang, R.; Cremers, D. DH3D: Deep Hierarchical 3D Descriptors for Robust Large-Scale 6DoF Relocalization. In Proceedings of the Computer Vision—ECCV 2020—16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part IV. Vedaldi, A., Bischof, H., Brox, T., Frahm, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12349, pp. 744–762. [Google Scholar] [CrossRef]
- Ort, T.; Paull, L.; Rus, D. Autonomous Vehicle Navigation in Rural Environments Without Detailed Prior Maps. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation, ICRA 2018, Brisbane, Australia, 21–25 May 2018; pp. 2040–2047. [Google Scholar] [CrossRef]
- Wang, P.; Yang, R.; Cao, B.; Xu, W.; Lin, Y. DeLS-3D: Deep Localization and Segmentation With a 3D Semantic Map. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, 18–22 June 2018; pp. 5860–5869. [Google Scholar] [CrossRef] [Green Version]
- Biber, P.; Straßer, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27 October–1 November 2003; pp. 2743–2748. [Google Scholar] [CrossRef]
- Takeuchi, E.; Tsubouchi, T. A 3-D Scan Matching using Improved 3-D Normal Distributions Transform for Mobile Robotic Mapping. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2006, Beijing, China, 9–15 October 2006; pp. 3068–3073. [Google Scholar] [CrossRef]
- Ao, S.; Hu, Q.; Yang, B.; Markham, A.; Guo, Y. SpinNet: Learning a General Surface Descriptor for 3D Point Cloud Registration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2021, Virtual, 19–25 June 2021; pp. 11753–11762. [Google Scholar] [CrossRef]
- Choy, C.B.; Park, J.; Koltun, V. Fully Convolutional Geometric Features. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision, ICCV 2019, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8957–8965. [Google Scholar] [CrossRef]
- Deng, H.; Birdal, T.; Ilic, S. PPF-FoldNet: Unsupervised Learning of Rotation Invariant 3D Local Descriptors. In Proceedings of the Computer Vision—ECCV 2018—15th European Conference, Munich, Germany, 8–14 September 2018; Proceedings, Part V. Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; Volume 11209, pp. 620–638. [Google Scholar] [CrossRef] [Green Version]
- Gojcic, Z.; Zhou, C.; Wegner, J.D.; Wieser, A. The Perfect Match: 3D Point Cloud Matching With Smoothed Densities. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, 16–20 June 2019; pp. 5545–5554. [Google Scholar] [CrossRef] [Green Version]
- Segal, A.; Hähnel, D.; Thrun, S. Generalized-ICP. In Proceedings of the Robotics: Science and Systems V, University of Washington, Seattle, WA, USA, 28 June8–1 July 2009; Trinkle, J., Matsuoka, Y., Castellanos, J.A., Eds.; The MIT Press: Cambridge, MA, USA. [Google Scholar] [CrossRef]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A globally optimal solution to 3D ICP point-set registration. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 2241–2254. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, H.; Wang, H.; Zhang, N.; Yang, Y.; Zhou, Z. Robust probability model based on variational Bayes for point set registration. Knowl. Based Syst. 2022, 241, 108182. [Google Scholar] [CrossRef]
- Jian, B.; Vemuri, B.C. Robust point set registration using gaussian mixture models. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 1633–1645. [Google Scholar] [CrossRef] [PubMed]
- Myronenko, A.; Song, X. Point set registration: Coherent point drift. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2262–2275. [Google Scholar] [CrossRef] [Green Version]
- Golyanik, V.; Taetz, B.; Reis, G.; Stricker, D. Extended coherent point drift algorithm with correspondence priors and optimal subsampling. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision, WACV 2016, Lake Placid, NY, USA, 7–10 March 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Gao, W.; Tedrake, R. FilterReg: Robust and Efficient Probabilistic Point-Set Registration Using Gaussian Filter and Twist Parameterization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, 16–20 June 2019; pp. 11095–11104. [Google Scholar] [CrossRef] [Green Version]
- Fu, K.; Luo, J.; Luo, X.; Liu, S.; Zhang, C.; Wang, M. Robust Point Cloud Registration Framework Based on Deep Graph Matching. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 6183–6195. [Google Scholar] [CrossRef]
- Wang, Y.; Solomon, J.M. PRNet: Self-Supervised Learning for Partial-to-Partial Registration. In Advances in Neural Information Processing Systems 32, Proceedings of the Annual Conference on Neural Information Processing Systems 2019, NeurIPS 2019, Vancouver, BC, Canada, 8–14 December 2019; Wallach, H.M., Larochelle, H., Beygelzimer, A., d’Alché-Buc, F., Fox, E.B., Garnett, R., Eds.; The MIT Press: Cambridge, MA, USA, 2019; pp. 8812–8824. [Google Scholar]
- Yew, Z.J.; Lee, G.H. RPM-Net: Robust Point Matching Using Learned Features. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020; pp. 11821–11830. [Google Scholar] [CrossRef]
- Borrmann, D.; Elseberg, J.; Lingemann, K.; Nüchter, A. The 3d hough transform for plane detection in point clouds: A review and a new accumulator design. 3D Res. 2011, 2, 3. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Leng, X.; Xiao, J.; Wang, Y. A multi-scale plane-detection method based on the Hough transform and region growing. Photogramm. Rec. 2016, 31, 166–192. [Google Scholar] [CrossRef]
- Vo, A.V.; Truong-Hong, L.; Laefer, D.F.; Bertolotto, M. Octree-based region growing for point cloud segmentation. ISPRS J. Photogramm. Remote Sens. 2015, 104, 88–100. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining (KDD-96), Portland, OR, USA, 4–8 August 1996; Simoudis, E., Han, J., Fayyad, U.M., Eds.; AAAI Press: Palo Alto, CA, USA, 1996; pp. 226–231. [Google Scholar] [CrossRef]
- Weber, C.; Hahmann, S.; Hagen, H. Sharp Feature Detection in Point Clouds. In Proceedings of the SMI 2010, Shape Modeling International Conference, Aix en Provence, France, 21–23 June 2010; pp. 175–186. [Google Scholar] [CrossRef] [Green Version]
- Rousseeuw, P.J.; Hubert, M. Robust statistics for outlier detection. Wiley Interdiscip. Rev. Data Min. Knowl. Discovery 2011, 1, 73–79. [Google Scholar] [CrossRef]
- Hoppe, H.; DeRose, T.; Duchamp, T.; McDonald, J.A.; Stuetzle, W. Surface reconstruction from unorganized points. In Proceedings of the 19th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1992, Chicago, IL, USA, 27–31 July 1992; Thomas, J.J., Ed.; ACM: New York, NY, USA, 1992; pp. 71–78. [Google Scholar] [CrossRef]
- Cho, M.; Lee, J.; Lee, K.M. Reweighted Random Walks for Graph Matching. In Proceedings of the Computer Vision—ECCV 2010—11th European Conference on Computer Vision, Heraklion, Greece, 5–11 September 2010; Proceedings, Part V. Daniilidis, K., Maragos, P., Paragios, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6315, pp. 492–505. [Google Scholar] [CrossRef]
- Bougleux, S.; Gaüzère, B.; Brun, L. A Hungarian Algorithm for Error-Correcting Graph Matching. In Proceedings of the Graph-Based Representations in Pattern Recognition—11th IAPR-TC-15 International Workshop, GbRPR 2017, Anacapri, Italy, 16–18 May 2017; Foggia, P., Liu, C., Vento, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10310, pp. 118–127. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.E.; Jacobson, A.; Jacobson, A.; Alexa, M.; Alexa, M. Fast Updates for Least-Squares Rotational Alignment. Comput. Graph. Forum (Print) 2021. [Google Scholar] [CrossRef]
- Pomerleau, F.; Liu, M.; Colas, F.; Siegwart, R. Challenging data sets for point cloud registration algorithms. Int. J. Rob. Res. 2012, 31, 1705–1711. [Google Scholar] [CrossRef] [Green Version]
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Voxelized GICP for Fast and Accurate 3D Point Cloud Registration. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA 2021, Xi’an, China, 30 May–5 June 2021; pp. 11054–11059. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Keypoint-based 4-points congruent sets–automated marker-less registration of laser scans. ISPRS J. Photogramm. Remote Sens. 2014, 96, 149–163. [Google Scholar] [CrossRef]
- Umeyama, S. Least-squares estimation of transformation parameters between two point patterns. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 376–380. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Gao, W.; Wu, Y.; Liu, Y.; Shen, Y. High-quality indoor scene 3D reconstruction with RGB-D cameras: A brief review. Comput. Vis. Media 2022, 8, 369–393. [Google Scholar] [CrossRef]
- Choi, S.; Zhou, Q.; Koltun, V. Robust reconstruction of indoor scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2015, Boston, MA, USA, 7–12 June 2015; pp. 5556–5565. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Hokuyo UTM-30LX | Riegl VZ-400 | ||
|---|---|---|---|---|
| Dataset | 1 | 2 | 3 | 4 |
| NO. of frames | 45 | 31 | 17 × 9 | 7 × 9 |
| Avg. points | ||||
| Resolution(cm) | 0.65 | 0.98 | 3.6 | 9.6 |
| Scale | small | large | small | large |
| overlap | 0.890% | 0.956% | 7.53% | 3.83% |
| Methods | Errors | Times (s) | ||
|---|---|---|---|---|
| (radian) | (cm) | RMSE (cm) | ||
| ICP1 [7] | 0.044 | 0.091 | 0.108 | 0.798 |
| ICP2 [9] | 5.162 | 4.291 | 4.905 | 0.583 |
| NDT [17] | 0.041 | 0.026 | 0.045 | 1.387 |
| GICP [23] | 0 | 1.923 | 6.809 | 69.447 |
| FGICP [45] | 0.007 | 6.226 | 5.895 | 0.183 |
| K4PCS [46] | 0.013 | 0.021 | 0.015 | 22.861 |
| Coarse | 0.005 | 0.102 | 0.198 | 2.524 |
| Fine | 5.162 | 4.291 | 4.905 | 0.003 |
| Methods | Errors | Times (s) | ||||||
|---|---|---|---|---|---|---|---|---|
| (radian) | (cm) | RMSE (cm) | ||||||
| 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | |
| ICP1 | 0.053 | 0.048 | 0.167 | 0.14 | 0.147 | 0.125 | 35.112 | 5.328 |
| ICP2 | 0.011 | 0.007 | 0.031 | 0.013 | 0.026 | 0.021 | 8.874 | 6.349 |
| NDT | × | 0.067 | × | 0.328 | × | 0.347 | × | 6.142 |
| GICP | 0.003 | 0.003 | 0.001 | 0.003 | 0.003 | 0.008 | 379.595 | 254.665 |
| FGICP | 0.003 | 0.003 | 0.001 | 0.003 | 0.178 | 0.008 | 1.959 | 1.179 |
| KFPCS | 0.086 | 0.152 | 0.191 | 0.323 | 0.178 | 0.325 | 214.517 | 128.030 |
| Coarse | 0.032 | 0.018 | 0.064 | 0.07 | 0.055 | 0.064 | 3.847 | 4.988 |
| Fine | 0.002 | 0.004 | 0.004 | 0.002 | 0.013 | 0.004 | 0.008 | 0.014 |
| (radian) | (m) | RMSE (m) | Times (s) | |
|---|---|---|---|---|
| DS-3 | 0.013/0.004 | 0.0081/0.0010 | 0.0019/0.0003 | 10.684/0.005 |
| DS-4 | 0.021/0.008 | 0.0017/0.0003 | 0.0023/0.0043 | 13.324/0.015 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Zhang, Y.; Ge, G.; Yang, H.; Wang, Y. A New Approach toward Corner Detection for Use in Point Cloud Registration. Remote Sens. 2023, 15, 3375. https://doi.org/10.3390/rs15133375
Wang W, Zhang Y, Ge G, Yang H, Wang Y. A New Approach toward Corner Detection for Use in Point Cloud Registration. Remote Sensing. 2023; 15(13):3375. https://doi.org/10.3390/rs15133375
Chicago/Turabian StyleWang, Wei, Yi Zhang, Gengyu Ge, Huan Yang, and Yue Wang. 2023. "A New Approach toward Corner Detection for Use in Point Cloud Registration" Remote Sensing 15, no. 13: 3375. https://doi.org/10.3390/rs15133375
APA StyleWang, W., Zhang, Y., Ge, G., Yang, H., & Wang, Y. (2023). A New Approach toward Corner Detection for Use in Point Cloud Registration. Remote Sensing, 15(13), 3375. https://doi.org/10.3390/rs15133375