
A Systematic Approach to Identify Shipping Emissions Using Spatio-Temporally Resolved TROPOMI Data


Abstract
:1. Introduction
2. Related Works
- We demonstrate an unsupervised method to identify shipping emissions using NO2 column density data without the true ship location information (e.g., AIS data) provided prior to the analysis.
- We propose guidelines for reflecting spatial and temporal heterogeneity when analyzing shipping emissions using remote sensing data.
- We demonstrate the efficacy of our method in identifying shipping emissions by validating it with real-world data of spatial ship track location and temporal economic trend data.
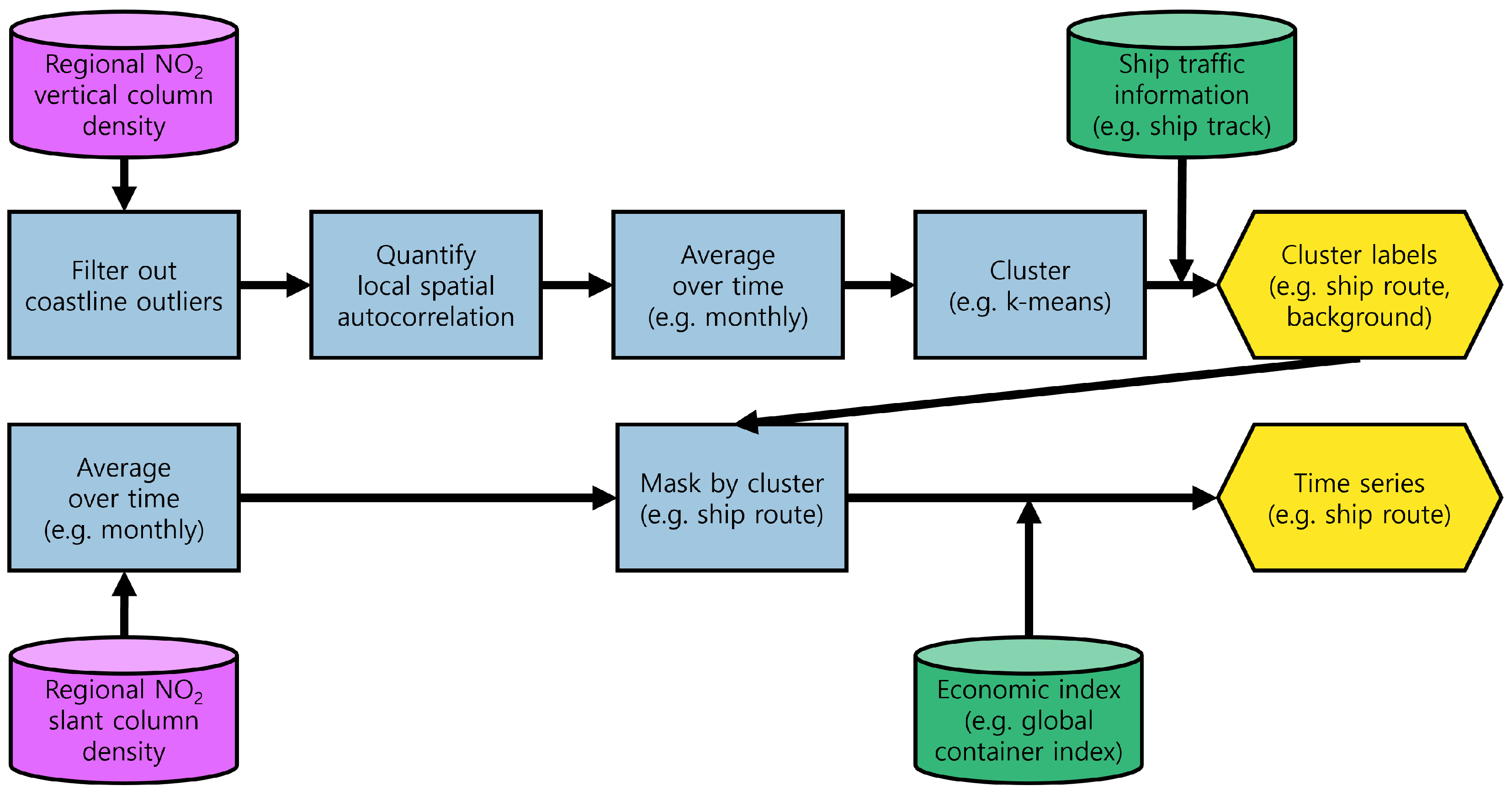
3. Research Scheme
4. Materials
4.1. TROPOMI NO2 Datasets
4.2. Spatio-Temporal Validation
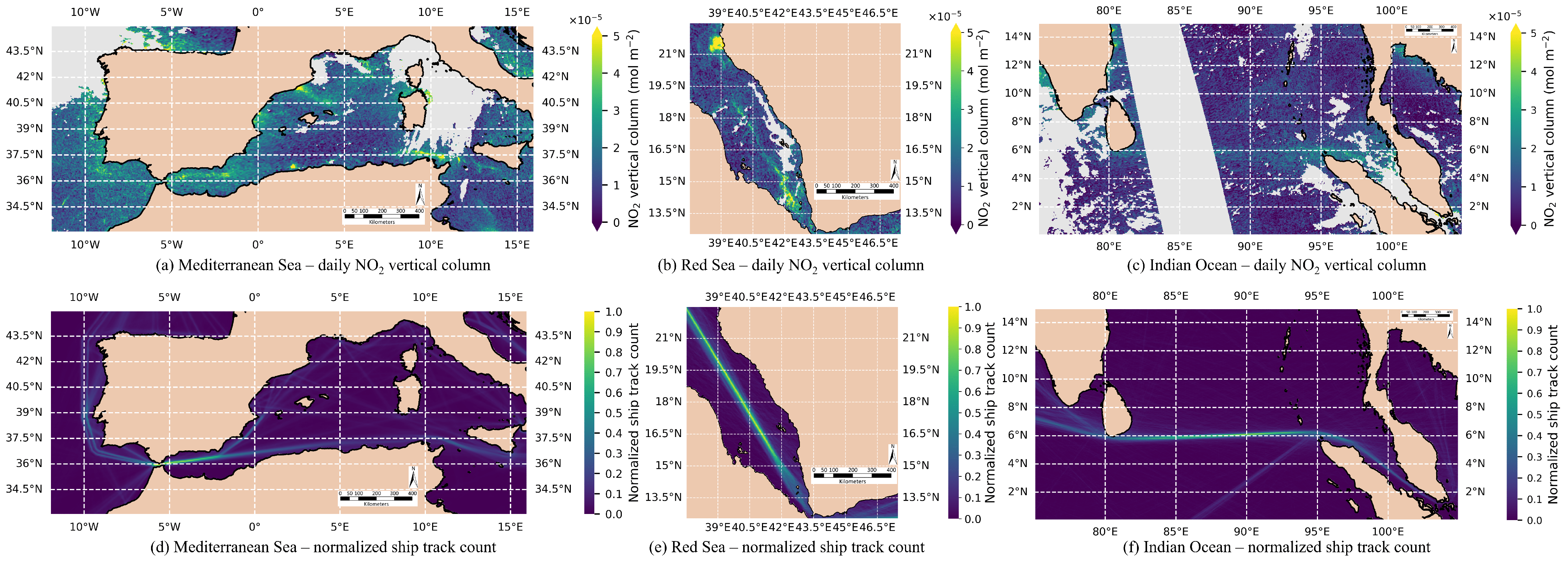
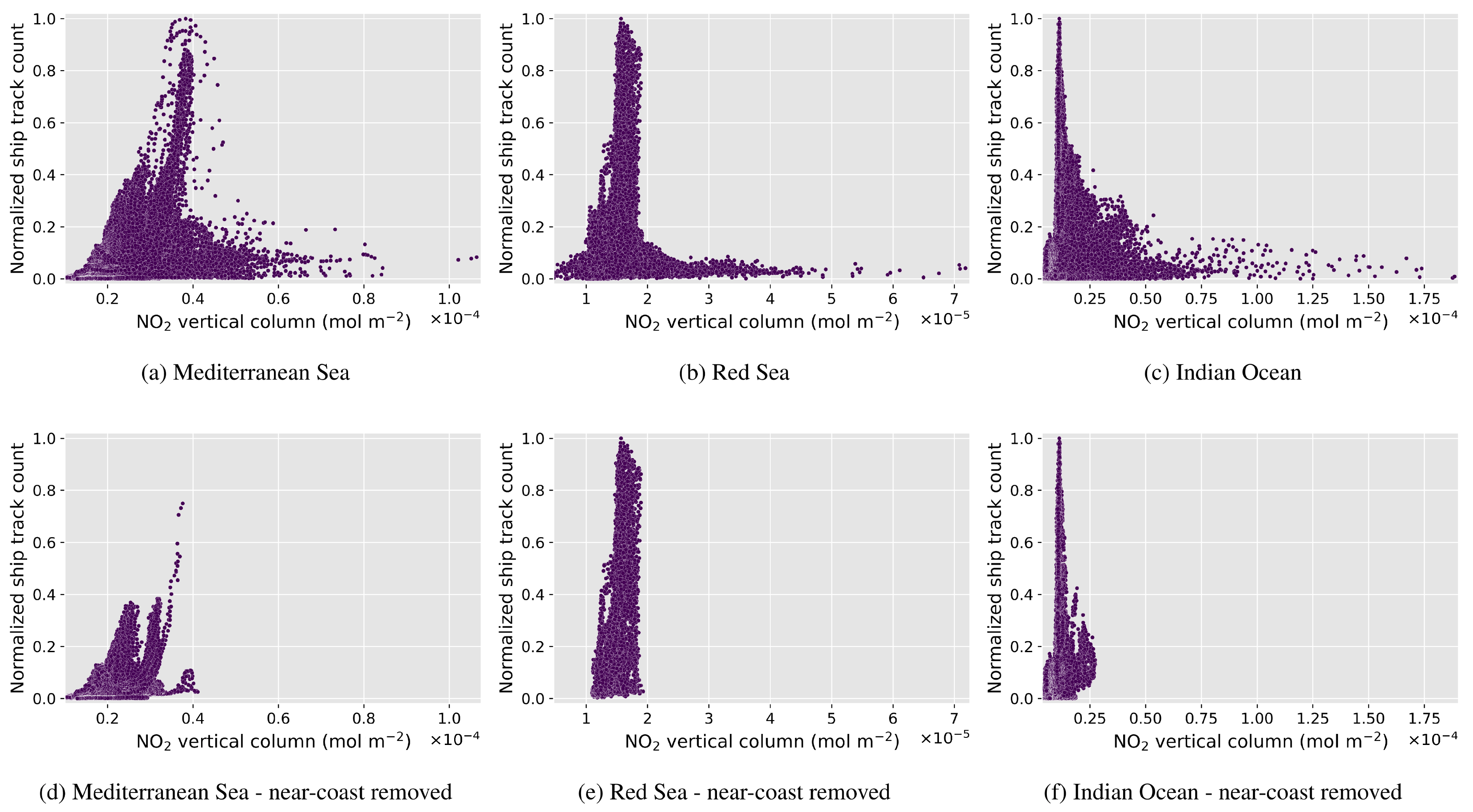
- Spatially, we brought in a ship track count data [16] to verify that our results match real-world ship track data. Each geographic coordinate has vessel location information representing the total counts of ship tracks recorded in the data collection period. We used the normalized form of the total ship track counts per region. Lastly, the normalized counts were regridded on the same coordinates as the TROPOMI NO2 column density.
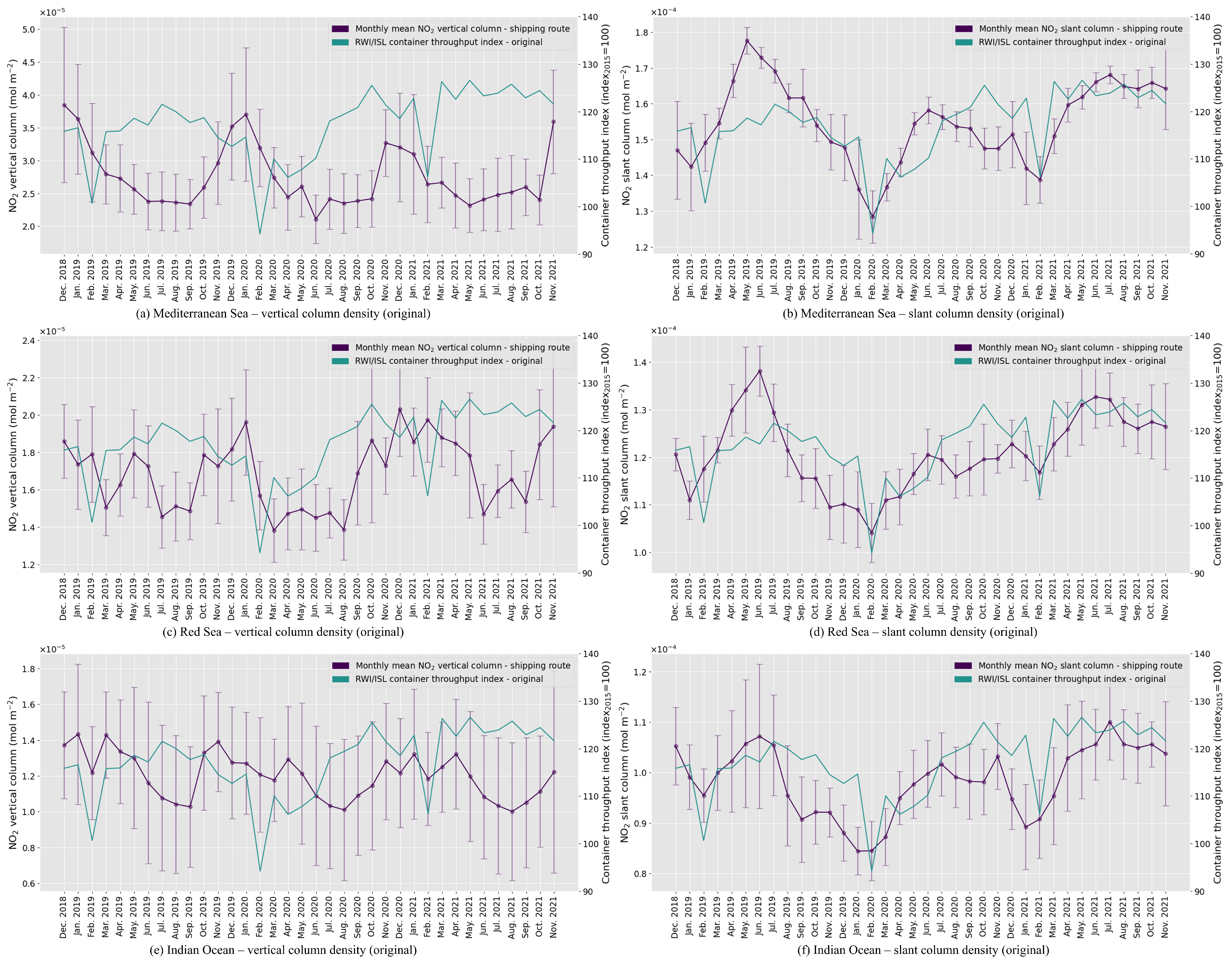
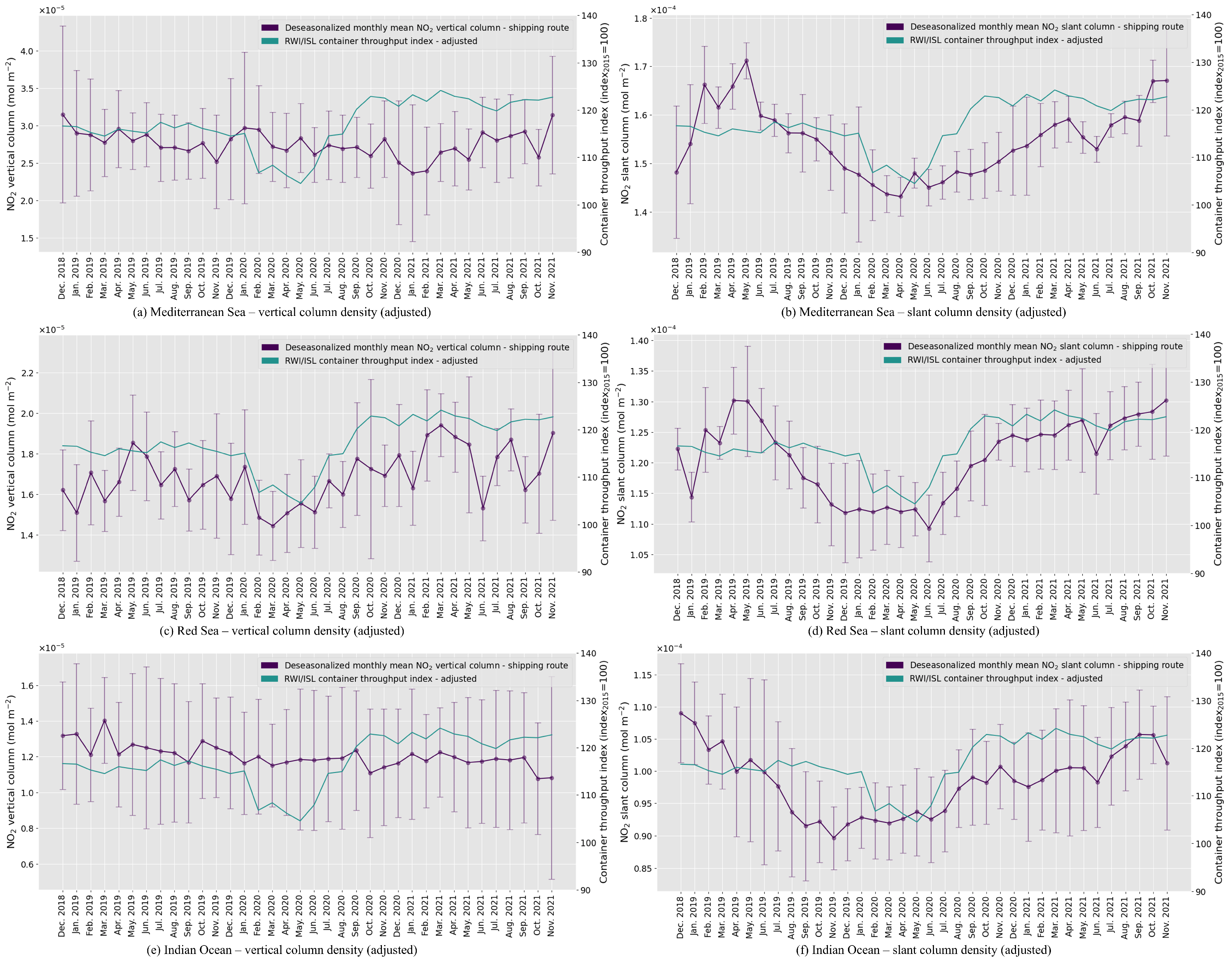
- Temporally, we brought in a global container throughput index [17] to demonstrate that our results reflect the global business cycle of shipping volume. This index is an estimate of global container throughput, representing about 60% of the global trade volume via shipment collected from a total of 89 international ports from December 2018 to November 2021. Since our regions of interest lie along busy shipping routes connecting Europe and Asia, the trend of the global trade volume should be reflected in the trend of emission concentrations in these regions.
5. Methods
5.1. Data Preprocessing
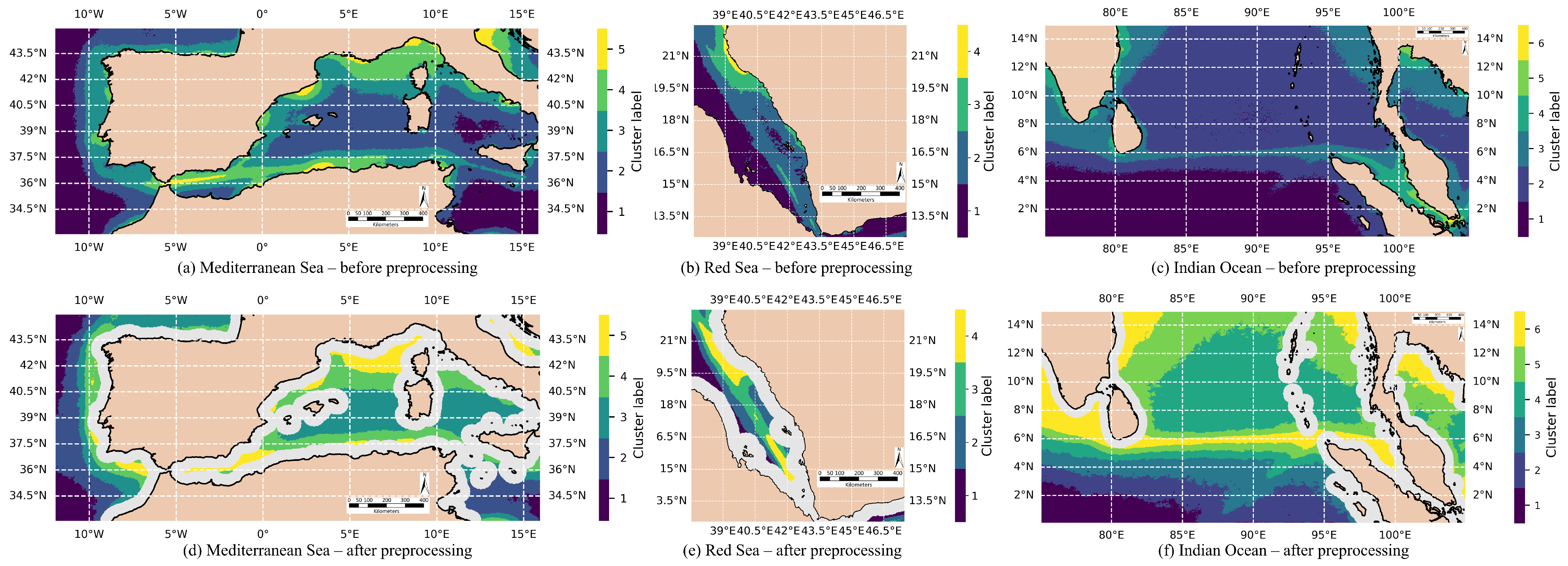
5.1.1. Near-Coast Removal
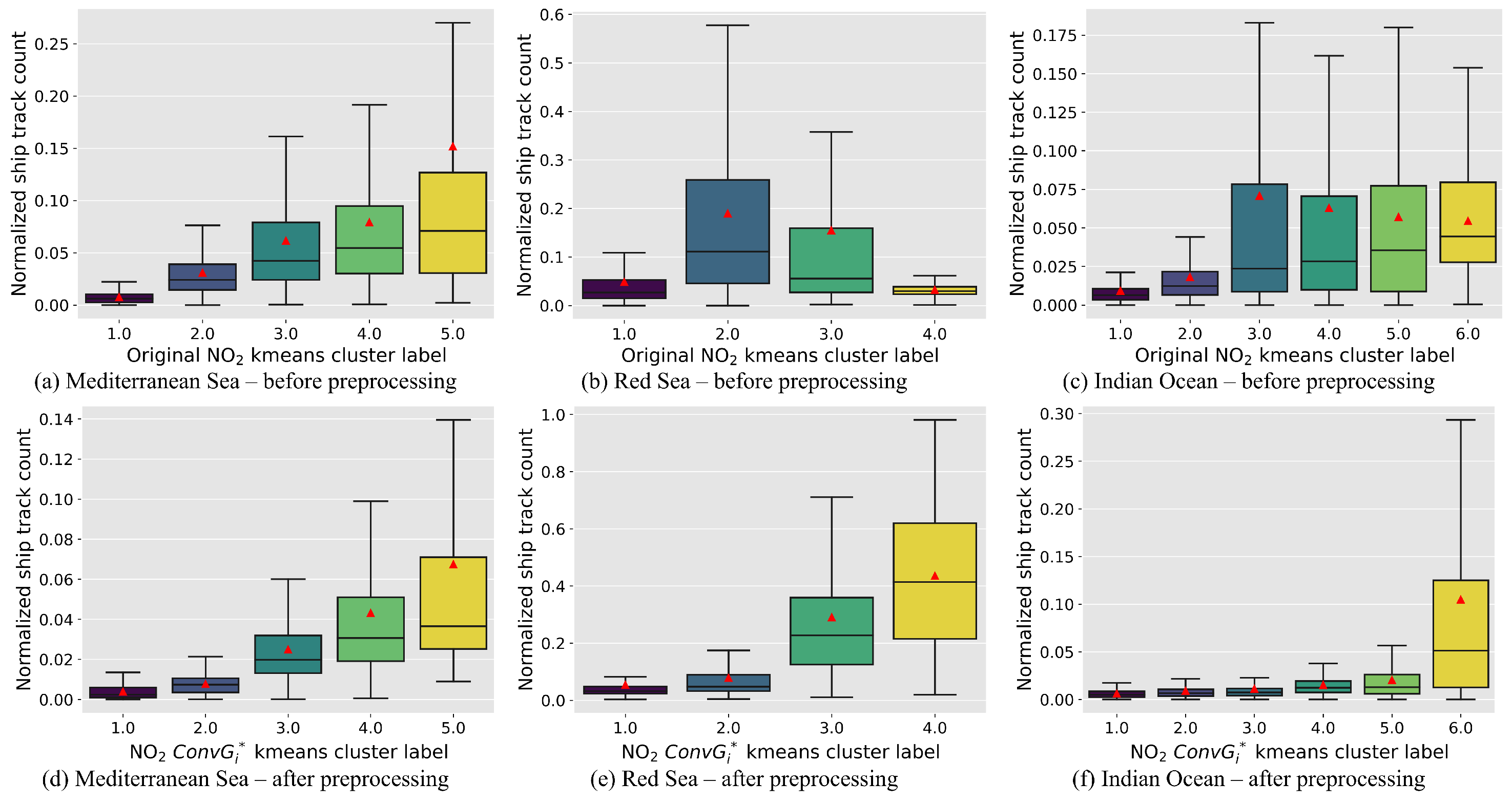
5.1.2. Spatial Data Preprocessing
5.1.3. Temporal Data Preprocessing
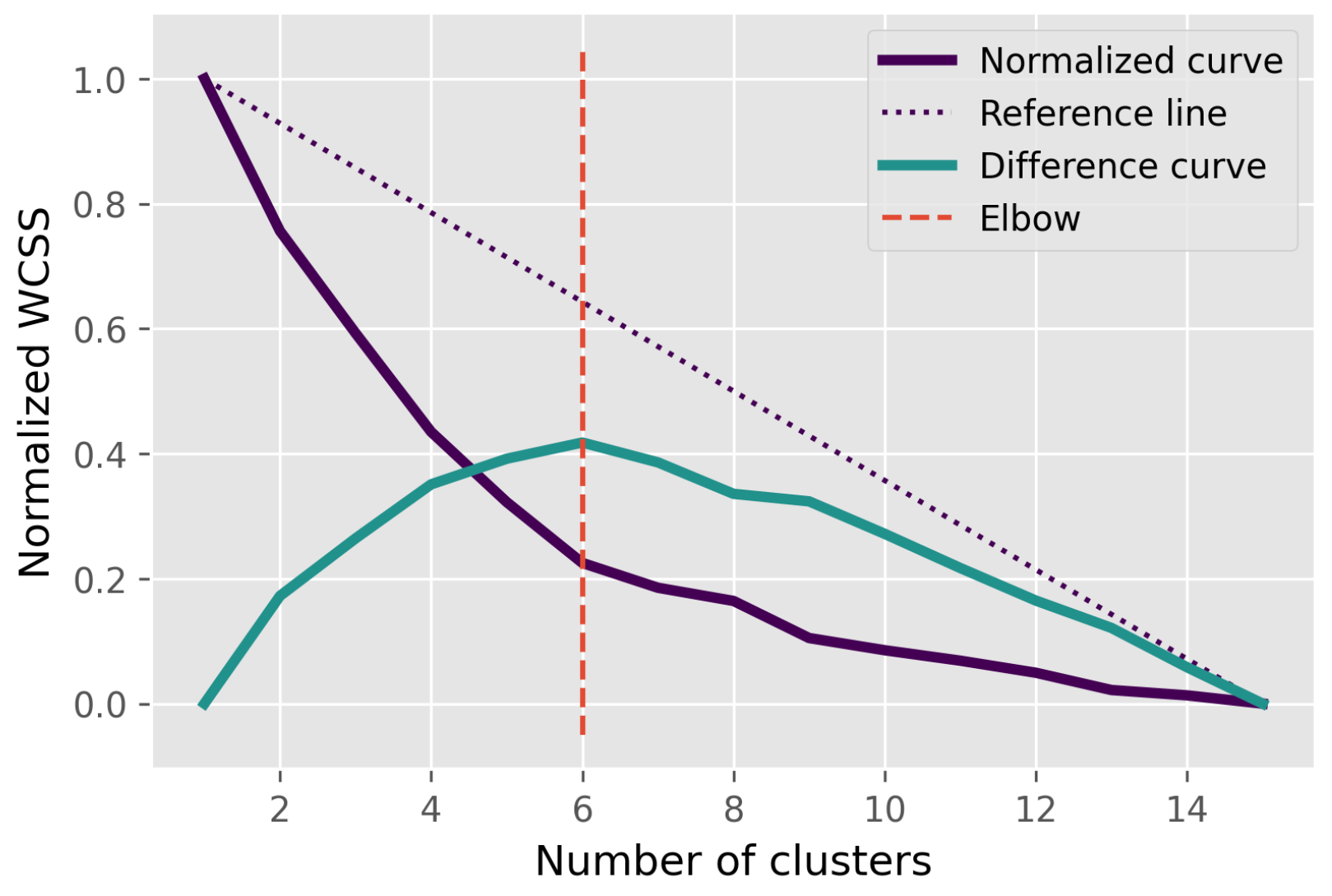
5.2. Clustering
5.3. Quantification of Spatial and Temporal Correlation
6. Results and Discussion
6.1. Validation of Spatial Data Preprocessing
6.2. Validation of Temporal Data Preprocessing
7. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NO2 | Nitrogen dioxide |
| NOx | Nitrogen oxides |
| IMO | International Maritime Organization |
| TROPOMI | TROPOspheric Monitoring Instrument |
| AIS | Automatic identification system |
| VCD | Vertical column density |
| SCD | Slant column density |
| COVID-19 | Coronavirus disease 2019 |
| WGS84 | World Geodetic System 1984 |
| LISA | Local indicator of spatial autocorrelation |
| WCSS | Within-cluster sum of squares |
| RWI/ISL | Rheinisch-Westfälisches Institut für Wirtschaftsforschung/Institute of Shipping |
| Economics and Logistics | |
| CAMS | Copernicus Atmosphere Monitoring Service |
| EAC4 | European Centre for Medium-Range Weather Forecasts (ECMWF) |
| Atmospheric Composition 4 |
Appendix A










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Type | Cluster 1 | Cluster 2 | Cluster 3 | Cluster 4 | Cluster 5 | Cluster 6 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Medit. | Original | 1.382 | 0.832 | 1.843 | 1.047 | 2.344 | 1.363 | 3.013 | 1.840 | 4.176 | 3.341 | - | - |
| Sea | 1.212 | 0.763 | 1.419 | 0.880 | 1.742 | 1.014 | 2.113 | 1.244 | 2.701 | 1.592 | - | - | |
| Red Sea | Original | 1.190 | 0.575 | 1.476 | 0.722 | 1.924 | 1.300 | 3.291 | 2.933 | - | - | - | - |
| 1.201 | 0.590 | 1.343 | 0.661 | 1.485 | 0.758 | 1.681 | 0.920 | - | - | - | - | ||
| Indian | Original | 0.561 | 0.513 | 0.870 | 0.570 | 1.220 | 0.739 | 1.954 | 1.241 | 3.797 | 3.036 | 9.504 | 8.190 |
| Ocean | 0.461 | 0.480 | 0.546 | 0.502 | 0.636 | 0.528 | 0.803 | 0.536 | 0.947 | 0.591 | 1.220 | 0.749 | |
| Region | Average NO2 VCD—2019 | Average NO2 VCD—2020 | Average NO2 VCD—2021 | |||
|---|---|---|---|---|---|---|
| Shipping Route | Background | Shipping Route | Background | Shipping Route | Background | |
| Medit. Sea | 2.741 ± 1.627 | 1.208 ± 0.779 | 2.695 ± 1.552 | 1.235 ± 0.743 | 2.580 ± 1.461 | 1.166 ± 0.735 |
| Red Sea | 1.661 ± 0.948 | 1.160 ± 0.571 | 1.627 ± 0.910 | 1.168 ± 0.609 | 1.750 ± 0.898 | 1.273 ± 0.584 |
| Indian Ocean | 1.277 ± 0.714 | 0.490 ± 0.466 | 1.183 ± 0.748 | 0.442 ± 0.493 | 1.182 ± 0.789 | 0.453 ± 0.484 |
| Average NO2 SCD—2019 | Average NO2 SCD—2020 | Average NO2 SCD—2021 | ||||
| Shipping Route | Background | Shipping Route | Background | Shipping Route | Background | |
| Medit. Sea | 15.942 ± 2.552 | 14.515 ± 2.426 | 14.806 ± 2.297 | 13.677 ± 2.097 | 15.974 ± 2.374 | 14.842 ± 2.208 |
| Red Sea | 12.140 ± 2.194 | 11.500 ± 1.969 | 11.606 ± 1.815 | 11.017 ± 1.663 | 12.652 ± 1.942 | 12.118 ± 1.839 |
| Indian Ocean | 9.826 ± 1.731 | 8.225 ± 1.259 | 9.425 ± 1.610 | 8.187 ± 1.398 | 10.113 ± 1.751 | 8.727 ± 1.675 |
| Region | NO2 VCD Ratio—2020/2019 | NO2 VCD Ratio—2021/2020 | NO2 VCD Ratio—2021/2019 | |||
|---|---|---|---|---|---|---|
| Shipping Route | Background | Shipping Route | Background | Shipping Route | Background | |
| Medit. Sea | 0.985 ± 0.047 | 1.029 ± 0.065 | 0.954 ± 0.061 | 0.946 ± 0.047 | 0.939 ± 0.062 | 0.972 ± 0.070 |
| Red Sea | 0.980 ± 0.038 | 1.008 ± 0.039 | 1.077 ± 0.050 | 1.091 ± 0.059 | 1.055 ± 0.050 | 1.099 ± 0.048 |
| Indian Ocean | 0.930 ± 0.071 | 0.908 ± 0.098 | 0.999 ± 0.081 | 1.023 ± 0.119 | 0.925 ± 0.069 | 0.931 ± 0.102 |
| NO2 SCD Ratio—2020/2019 | NO2 SCD Ratio—2021/2020 | NO2 SCD Ratio—2021/2019 | ||||
| Shipping Route | Background | Shipping Route | Background | Shipping Route | Background | |
| Medit. Sea | 0.928 ± 0.012 | 0.941 ± 0.011 | 1.079 ± 0.012 | 1.084 ± 0.015 | 1.002 ± 0.015 | 1.021 ± 0.020 |
| Red Sea | 0.956 ± 0.008 | 0.957 ± 0.007 | 1.090 ± 0.010 | 1.099 ± 0.008 | 1.041 ± 0.009 | 1.052 ± 0.008 |
| Indian Ocean | 0.963 ± 0.025 | 0.996 ± 0.013 | 1.071 ± 0.025 | 1.066 ± 0.016 | 1.031 ± 0.016 | 1.061 ± 0.015 |
References
- Atkinson, R. Atmospheric chemistry of VOCs and NOx. Atmos. Environ. 2000, 34, 2063–2101. [Google Scholar] [CrossRef]
- Kampa, M.; Castanas, E. Human health effects of air pollution. Environ. Pollut. 2008, 151, 362–367. [Google Scholar] [CrossRef] [PubMed]
- United States Environmental Protection Agency. Nitrogen Dioxide (NO2) Pollution. Available online: https://www.epa.gov/no2-pollution (accessed on 4 July 2023).
- Chauhan, A.J.; Krishna, M.T.; Frew, A.J.; Holgate, S.T. Exposure to nitrogen dioxide (NO2) and respiratory disease risk. Rev. Environ. Health 1998, 13, 73–90. [Google Scholar] [PubMed]
- Pöschl, U.; Shiraiwa, M. Multiphase Chemistry at the Atmosphere–Biosphere Interface Influencing Climate and Public Health in the Anthropocene. Chem. Rev. 2015, 115, 4440–4475. [Google Scholar] [CrossRef] [PubMed]
- Corbett, J.J.; Fischbeck, P. Emissions from Ships. Science 1997, 278, 823–824. [Google Scholar] [CrossRef]
- Eyring, V.; Köhler, H.; van Aardenne, J.; Lauer, A. Emissions from international shipping: 1. The last 50 years. J. Geophys. Res. Atmos. 2005, 110, 1–12. [Google Scholar] [CrossRef]
- Corbett, J.J.; Winebrake, J.J.; Green, E.H.; Kasibhatla, P.; Eyring, V.; Lauer, A. Mortality from ship emissions: A global assessment. Environ. Sci. Technol. 2007, 41, 8512–8518. [Google Scholar] [CrossRef]
- International Maritime Organization. International Maritime Organization: Feb 2019 Supplement: MARPOL Annex VI & NTC 2008 (IC664E). 2019. Available online: https://wwwcdn.imo.org/localresources/en/publications/Documents/Supplements/English/QQC664E_022019.pdf (accessed on 21 June 2023).
- British Broadcasting Corporation. Shipping Industry Faces Calls to Clean Up Emissions. 2018. Available online: https://www.bbc.com/news/business-43696900 (accessed on 21 June 2023).
- Gerretsen, I. Shipping Is One of the Dirtiest Industries. Now It’s Trying to Clean Up Its Act. 2019. Available online: https://edition.cnn.com/2019/10/03/business/global-shipping-climate-crisis-intl/index.html (accessed on 21 June 2023).
- Palmer, C. Cruise Industry Faces Choppy Seas as It Tries to Clean Up Its Act On Climate. 2022. Available online: https://www.reuters.com/business/sustainable-business/cruise-industry-faces-choppy-seas-it-tries-clean-up-its-act-climate-2022-07-27/ (accessed on 21 June 2023).
- Veefkind, J.P.; Aben, I.; McMullan, K.; Förster, H.; de Vries, J.; Otter, G.; Claas, J.; Eskes, H.J.; de Haan, J.F.; Kleipool, Q.; et al. TROPOMI on the ESA Sentinel-5 Precursor: A GMES mission for global observations of the atmospheric composition for climate, air quality and ozone layer applications. Remote. Sens. Environ. 2012, 120, 70–83. [Google Scholar] [CrossRef]
- Georgoulias, A.K.; Boersma, K.F.; van Vliet, J.; Zhang, X.; van der A, R.; Zanis, P.; de Laat, J. Detection of NO2 pollution plumes from individual ships with the TROPOMI/S5P satellite sensor. Environ. Res. Lett. 2020, 15, 124037. [Google Scholar] [CrossRef]
- Okamura, B. Proposed IMO Regulations for the Prevention of Air Pollution from Ships. J. Marit. Law Commer. 1995, 26, 183–195. [Google Scholar]
- Halpern, B.; Frazier, M.; Potapenko, J.; Casey, K.; Koenig, K.; Longo, C.; Lowndes, J.S.; Rockwood, C.; Selig, E.; Selkoe, K.; et al. Spatial and temporal changes in cumulative human impacts on the world’s ocean. Nat. Commun. 2015, 6, 7615. [Google Scholar] [CrossRef] [Green Version]
- Institute of Shipping Economics and Logistics. RWI/ISL Container Throughput Input Index: Revival of Global Trade. 2023. Available online: https://www.isl.org/en/containerindex (accessed on 21 June 2023).
- Berg, N.; Mellqvist, J.; Jalkanen, J.P.; Balzani, J. Ship emissions of SO2 and NO2: DOAS measurements from airborne platforms. Atmos. Meas. Tech. 2012, 5, 1085–1098. [Google Scholar] [CrossRef] [Green Version]
- Alföldy, B.; Lööv, J.B.; Lagler, F.; Mellqvist, J.; Berg, N.; Beecken, J.; Weststrate, H.; Duyzer, J.; Bencs, L.; Horemans, B.; et al. Measurements of air pollution emission factors for marine transportation in SECA. Atmos. Meas. Tech. 2013, 6, 1777–1791. [Google Scholar] [CrossRef] [Green Version]
- Pirjola, L.; Pajunoja, A.; Walden, J.; Jalkanen, J.P.; Rönkkö, T.; Kousa, A.; Koskentalo, T. Mobile measurements of ship emissions in two harbour areas in Finland. Atmos. Meas. Tech. 2014, 7, 149–161. [Google Scholar] [CrossRef] [Green Version]
- Lööv, J.; Alföldy, B.; Gast, L.; Hjorth, J.; Lagler, F.; Mellqvist, J.; Beecken, J.; Berg, N.; Duyzer, J.; Westrate, H.; et al. Field test of available methods to measure remotely SOx and NOx emissions from ships. Atmos. Meas. Tech. Discuss. 2013, 7, 2597–2613. [Google Scholar] [CrossRef] [Green Version]
- Richter, A.; Eyring, V.; Burrows, J.P.; Bovensmann, H.; Lauer, A.; Sierk, B.; Crutzen, P.J. Satellite measurements of NO2 from international shipping emissions. Geophys. Res. Lett. 2004, 31, L23110. [Google Scholar] [CrossRef]
- Boersma, K.F.; Vinken, G.C.M.; Tournadre, J. Ships going slow in reducing their NOx emissions: Changes in 2005–2012 ship exhaust inferred from satellite measurements over Europe. Environ. Res. Lett. 2015, 10, 074007. [Google Scholar] [CrossRef] [Green Version]
- Riess, T.C.V.W.; Boersma, K.F.; van Vliet, J.; Peters, W.; Sneep, M.; Eskes, H.; van Geffen, J. Improved monitoring of shipping NO2 with TROPOMI: Decreasing NOx emissions in European seas during the COVID-19 pandemic. Atmos. Meas. Tech. 2022, 15, 1415–1438. [Google Scholar] [CrossRef]
- Tobler, W.R. A Computer Movie Simulating Urban Growth in the Detroit Region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Haining, R. Spatial Autocorrelation. In International Encyclopedia of the Social & Behavioral Sciences, 2nd ed.; Wright, J.D., Ed.; Elsevier: Oxford, UK, 2015; pp. 105–110. [Google Scholar] [CrossRef]
- Heckel, A.; Kim, S.W.; Frost, G.J.; Richter, A.; Trainer, M.; Burrows, J.P. Influence of low spatial resolution a priori data on tropospheric NO2 satellite retrievals. Atmos. Meas. Tech. 2011, 4, 1805–1820. [Google Scholar] [CrossRef] [Green Version]
- Sun, K.; Zhu, L.; Cady-Pereira, K.; Chan Miller, C.; Chance, K.; Clarisse, L.; Coheur, P.F.; González Abad, G.; Huang, G.; Liu, X.; et al. A physics-based approach to oversample multi-satellite, multispecies observations to a common grid. Atmos. Meas. Tech. 2018, 11, 6679–6701. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Jacob, D.J.; Keutsch, F.N.; Mickley, L.J.; Scheffe, R.; Strum, M.; González Abad, G.; Chance, K.; Yang, K.; Rappenglück, B.; et al. Formaldehyde (HCHO) As a Hazardous Air Pollutant: Mapping Surface Air Concentrations from Satellite and Inferring Cancer Risks in the United States. Environ. Sci. Technol. 2017, 51, 5650–5657. [Google Scholar] [CrossRef] [PubMed]
- Dix, B.; de Bruin, J.; Roosenbrand, E.; Vlemmix, T.; Francoeur, C.; Gorchov-Negron, A.; McDonald, B.; Zhizhin, M.; Elvidge, C.; Veefkind, P.; et al. Nitrogen Oxide Emissions from U.S. Oil and Gas Production: Recent Trends and Source Attribution. Geophys. Res. Lett. 2019, 41, 1–9. [Google Scholar] [CrossRef]
- Goldberg, D.L.; Lu, Z.; Streets, D.G.; de Foy, B.; Griffin, D.; McLinden, C.A.; Lamsal, L.N.; Krotkov, N.A.; Eskes, H. Enhanced Capabilities of TROPOMI NO2: Estimating NOx from North American Cities and Power Plants. Environ. Sci. Technol. 2019, 53, 12594–12601. [Google Scholar] [CrossRef]
- Goldberg, D.L.; Anenberg, S.; Mohegh, A.; Lu, Z.; Streets, D.G. TROPOMI NO2 in the United States: A detailed look at the annual averages, weekly cycles, effects of temperature, and correlation with surface NO2 concentrations. Earth’s Future 2021, 9, e2020EF001665. [Google Scholar] [CrossRef]
- Cooper, M.J.; Martin, R.V.; Hammer, M.S.; Levelt, P.F.; Veefkind, P.; Lamsal, L.N.; Krotkov, N.A.; Brook, J.R.; McLinden, C.A. Global fine-scale changes in ambient NO2 during COVID-19 lockdowns. Nature 2022, 601, 380–387. [Google Scholar] [CrossRef]
- Souri, A.H.; Choi, Y.; Pan, S.; Curci, G.; Nowlan, C.R.; Janz, S.J.; Kowalewski, M.G.; Liu, J.; Herman, J.R.; Weinheimer, A.J. First Top-Down Estimates of Anthropogenic NOx Emissions Using High-Resolution Airborne Remote Sensing Observations. J. Geophys. Res. Atmos. 2018, 123, 3269–3284. [Google Scholar] [CrossRef]
- Kurchaba, S.; van Vliet, J.; Meulman, J.J.; Verbeek, F.J.; Veenman, C.J. Improving Evaluation of NO2 Emission from Ships Using Spatial Association on TROPOMI Satellite Data. In Proceedings of the 29th International Conference on Advances in Geographic Information Systems, 2021—SIGSPATIAL ’21, New York, NY, USA, 2–5 November 2021; pp. 454–457. [Google Scholar] [CrossRef]
- Kurchaba, S.; van Vliet, J.; Verbeek, F.J.; Meulman, J.J.; Veenman, C.J. Supervised Segmentation of NO2 Plumes from Individual Ships Using TROPOMI Satellite Data. Remote. Sens. 2022, 14, 5809. [Google Scholar] [CrossRef]
- Kubat, M.; Holte, R.; Matwin, S. Machine Learning for the Detection of Oil Spills in Satellite Radar Images. Mach. Learn. 1998, 30, 195–215. [Google Scholar] [CrossRef] [Green Version]
- Kuhn, M.; Johnson, K. Applied Predictive Modeling; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- United States Environmental Protection Agency. Nitrogen Oxides (NOx): Why and How They Are Controlled; EPA-456/F-99-006R. 1999. Available online: https://www3.epa.gov/ttn/catc/cica/files/fnoxdoc.pdf (accessed on 21 June 2023).
- Reşitoğlu, I.A.; Altinişik, K.; Keskin, A. The pollutant emissions from diesel-engine vehicles and exhaust aftertreatment systems. Clean Technol. Environ. Policy 2015, 17, 15–27. [Google Scholar] [CrossRef] [Green Version]
- Burrows, J.P.; Weber, M.; Buchwitz, M.; Rozanov, V.; Ladstätter-Weißenmayer, A.; Richter, A.; DeBeek, R.; Hoogen, R.; Bramstedt, K.; Eichmann, K.; et al. The Global Ozone Monitoring Experiment (GOME): Mission Concept and First Scientific Results. J. Atmos. Sci. 1999, 56, 151–175. [Google Scholar] [CrossRef]
- Levelt, P.F.; van den Oord, G.H.J.; Dobber, M.R.; Malkki, A.; Visser, H.; de Vries, J.; Stammes, P.; Lundell, J.O.V.; Saari, H. The ozone monitoring instrument. IEEE Trans. Geosci. Remote. Sens. 2006, 44, 1093–1101. [Google Scholar] [CrossRef]
- van Geffen, J.H.G.M.; Eskes, H.J.; Boersma, K.F.; Veefkind, J.P. TROPOMI ATBD of the Total and Tropospheric NO2 Data Products; Technical Report; Royal Netherlands Meteorological Institute: De Bilt, The Netherlands, 2022. [Google Scholar]
- Platt, U.; Perner, D. Measurements of Atmospheric Trace Gases by Long Path Differential UV/Visible Absorption Spectroscopy; Springer Series in Optical Sciences 39; Springer: Berlin/Heidelberg, Germany, 1983; pp. 95–110. [Google Scholar]
- Stutz, J.; Platt, U. Numerical analysis and estimation of the statistical error of differential optical absorption spectroscopy measurements with least-squares methods. Appl. Opt. 1996, 35, 6041–6053. [Google Scholar] [CrossRef] [Green Version]
- Platt, U.; Stutz, J. Differential Optical Absorption Spectroscopy: Principles and Applications; Physics of Earth and Space Environments; Springer: Berlin/Heidelberg, Germany, 2008; Volume 127. [Google Scholar] [CrossRef] [Green Version]
- Rew, R.; Davis, G. NetCDF: An interface for scientific data access. IEEE Comput. Graph. Appl. 1990, 10, 76–82. [Google Scholar] [CrossRef]
- Eskes, H.; van Geffen, J.; Boersma, F.; Eichmann, K.U.; Apituley, A.; Pedergnana, M.; Sneep, M.; Veefkind, J.P.; Loyola, D. Sentinel-5 Precursor/TROPOMI Level 2 Product User Manual Nitrogendioxide. 2022. Available online: https://sentinel.esa.int/documents/247904/2474726/Sentinel-5P-Level-2-Product-User-Manual-Nitrogen-Dioxide.pdf (accessed on 21 June 2023).
- Natural Earth Data. Free Vector and Raster Map Data at 1:10m, 1:50m, and 1:110m Scales [data set]. 2022. Available online: https://www.naturalearthdata.com/ (accessed on 21 June 2023).
- Haralick, R.M.; Sternberg, S.R.; Zhuang, X. Image Analysis Using Mathematical Morphology. IEEE Trans. Pattern Anal. Mach. Intell. 1987, PAMI-9, 532–550. [Google Scholar] [CrossRef]
- LeSage, J.P. An Introduction to Spatial Econometrics. Rev. Econ. Ind. 2008, 123, 19–44. [Google Scholar] [CrossRef] [Green Version]
- LeSage, J.P.; Pace, R.K. Introduction to Spatial Econometrics; Statistics: A Series of Textbooks and Monographs; Chapman & Hall/CRC: Boca Raton, FL, USA, 2009. [Google Scholar]
- Thorpe, A.K.; Frankenberg, C.; Thompson, D.R.; Duren, R.M.; Aubrey, A.D.; Bue, B.D.; Green, R.O.; Gerilowski, K.; Krings, T.; Borchardt, J.; et al. Airborne DOAS retrievals of methane, carbon dioxide, and water vapor concentrations at high spatial resolution: Application to AVIRIS-NG. Atmos. Meas. Tech. 2017, 10, 3833–3850. [Google Scholar] [CrossRef] [Green Version]
- Getis, A.; Ord, J.K. The Analysis of Spatial Association by Use of Distance Statistics. Geogr. Anal. 1992, 24, 189–206. [Google Scholar] [CrossRef]
- Anselin, L. Local Indicators of Spatial Association—LISA. Geogr. Anal. 1995, 27, 93–115. [Google Scholar] [CrossRef]
- Nowlan, C.R.; Liu, X.; Janz, S.J.; Kowalewski, M.G.; Chance, K.; Follette-Cook, M.B.; Fried, A.; González Abad, G.; Herman, J.R.; Judd, L.M.; et al. Nitrogen dioxide and formaldehyde measurements from the GEOstationary Coastal and Air Pollution Events (GEO-CAPE) Airborne Simulator over Houston, Texas. Atmos. Meas. Tech. 2018, 11, 5941–5964. [Google Scholar] [CrossRef] [Green Version]
- Judd, L.M.; Al-Saadi, J.A.; Szykman, J.J.; Valin, L.C.; Janz, S.J.; Kowalewski, M.G.; Eskes, H.J.; Veefkind, J.P.; Cede, A.; Mueller, M.; et al. Evaluating Sentinel-5P TROPOMI tropospheric NO2 column densities with airborne and Pandora spectrometers near New York City and Long Island Sound. Atmos. Meas. Tech. 2020, 13, 6113–6140. [Google Scholar] [CrossRef] [PubMed]
- Motulsky, H.J.; Brown, R.E. Detecting outliers when fitting data with nonlinear regression—A new method based on robust nonlinear regression and the false discovery rate. BMC Bioinform. 2006, 7, 123. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ord, J.K.; Getis, A. Local Spatial Autocorrelation Statistics: Distributional Issues and an Application. Geogr. Anal. 1995, 27, 286–306. [Google Scholar] [CrossRef]
- ArcGIS. How Generate Spatial Weights Matrix Works. Available online: https://pro.arcgis.com/en/pro-app/latest/tool-reference/spatial-statistics/how-generate-spatial-weights-matrix-spatial-statis.htm (accessed on 21 June 2023).
- Pace, R.K.; Barry, R. Sparse spatial autoregressions. Stat. Probab. Lett. 1997, 33, 291–297. [Google Scholar] [CrossRef]
- Shapiro, L.G.; Stockman, G.C. Computer Vision; Prentice Hall: Hoboken, NJ, USA, 2001. [Google Scholar]
- Roh, M.I. Determination of an economical shipping route considering the effects of sea state for lower fuel consumption. Int. J. Nav. Archit. Ocean. Eng. 2013, 5, 246–262. [Google Scholar] [CrossRef] [Green Version]
- Steinhaus, H. Sur la division des corps materiels en parties. Bull. Acad. Pol. Sci. 1956, 4, 801–804. [Google Scholar]
- Lloyd, S.P. Least squares quantization in PCM. Bell Telephone Laboratories Paper. Published in journal much later: Lloyd, S.P.: Least squares quantization in PCM. IEEE Trans. Inf. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef] [Green Version]
- MacQueen, J.B. Some methods for classification and analysis of multivariate observations. In Proceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability, Berkeley, CA, USA, 21 June–18 July 1965; University of California Press: Berkeley, CA, USA, 1967; Volume 1, pp. 281–297. [Google Scholar]
- Jain, A.; Murty, M.; Flynn, P. Data clustering: A review. ACM Comput. Surv. 1999, 31, 264–323. [Google Scholar] [CrossRef]
- Jarvis, R.; Patrick, E. Clustering Using a Similarity Measure Based on Shared Near Neighbors. IEEE Trans. Comput. 1973, C-22, 1025–1034. [Google Scholar] [CrossRef]
- Arthur, D.; Vassilvitskii, S. K-means++: The advantages of careful seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LO, USA, 7–9 January 2007; pp. 1027–1035. [Google Scholar]
- Thorndike, R.L. Who belongs in the family? Psychometrika 1953, 18, 267–276. [Google Scholar] [CrossRef]
- Hamilton, J.D. Measuring global economic activity. J. Appl. Econom. 2019, 36, 293–303. [Google Scholar] [CrossRef]
- Michail, N.A. World economic growth and seaborne trade volume: Quantifying the relationship. Transp. Res. Interdiscip. Perspect. 2020, 4, 100108. [Google Scholar] [CrossRef]
- United Nations Conference on Trade and Development. COVID-19 and Maritime Transport: Impact and Responses. Available online: https://unctad.org/webflyer/covid-19-and-maritime-transport-impact-and-responses (accessed on 21 June 2023).
- Verschuur, J.; Koks, E.E.; Hall, J.W. Global economic impacts of COVID-19 lockdown measures stand out in high-frequency shipping data. PLoS ONE 2021, 16, e0248818. [Google Scholar] [CrossRef]
- Koyuncu, K.; Tavacioğlu, L.; Gökmen, N.; Çelen Arican, U. Forecasting COVID-19 impact on RWI/ISL container throughput index by using SARIMA models. Marit. Policy Manag. 2021, 48, 1096–1108. [Google Scholar] [CrossRef]
- Persons, W.M. General Considerations and Assumptions. Rev. Econ. Stat. 1919, 1, 5–107. [Google Scholar] [CrossRef]
- Copernicus Atmosphere Monitoring Service. CAMS Global Reanalysis (EAC4). 2019. Available online: https://www.ecmwf.int/en/forecasts/dataset/cams-global-reanalysis (accessed on 21 June 2023).
- Eskes, H.J.; Boersma, K.F. Averaging kernels for DOAS total-column satellite retrievals. Atmos. Chem. Phys. 2003, 3, 1285–1291. [Google Scholar] [CrossRef] [Green Version]
- Richter, A.; Hilboll, A.; Burrows, J.P. Improving satellite retrievals of large tropospheric NO2 columns. In Proceedings of the Geophysical Research Abstracts, EGU General Assembly 2014, Vienna, Austria, 27 April–2 May 2014; Volume 16. [Google Scholar]
- Lorente, A.; Boersma, K.F.; Yu, H.; Dörner, S.; Hilboll, A.; Richter, A.; Liu, M.; Lamsal, L.N.; Barkley, M.; De Smedt, I.; et al. Structural uncertainty in air mass factor calculation for NO2 and HCHO satellite retrievals. Atmos. Meas. Tech. 2017, 10, 759–782. [Google Scholar] [CrossRef] [Green Version]
- Corbett, J.J.; Fischbeck, P.S.; Pandis, S.N. Global nitrogen and sulfur inventories for oceangoing ships. J. Geophys. Res. 1999, 104, 3457–3470. [Google Scholar] [CrossRef]
- Verhoelst, T.; Compernolle, S.; Pinardi, G.; Lambert, J.C.; Eskes, H.J.; Eichmann, K.U.; Fjæraa, A.M.; Granville, J.; Niemeijer, S.; Cede, A.; et al. Ground-based validation of the Copernicus Sentinel-5P TROPOMI NO2 measurements with the NDACC ZSL-DOAS, MAX-DOAS and Pandonia global networks. Atmos. Meas. Tech. 2021, 14, 481–510. [Google Scholar] [CrossRef]






| Dataset | Latitudinal Coverage | Longitudinal Coverage | Temporal Coverage |
|---|---|---|---|
| Mediterranean Sea—VCD | 33.015625N–44.984375N | 11.98438W–15.98438E | |
| Mediterranean Sea—SCD | (384 pixels) | (896 pixels) | |
| Red Sea—VCD | 12.515625N–22.484375N | 37.51563E–47.48438E | 5 Dec 2018–10 Nov 2021 |
| Red Sea—SCD | (320 pixels) | (320 pixels) | (1072 days) |
| Indian Ocean—VCD | 0.015625N–14.984375N | 75.01563E–104.98438E | |
| Indian Ocean—SCD | (480 pixels) | (960 pixels) |
| Test Region | Original NO2 Data | Clustered NO2 Data without | Clustered NO2 Data with |
|---|---|---|---|
| Mediterranean Sea | 0.4479 * (0.0000) | 0.4586 * (0.0000) | 0.5013 * (0.0000) |
| Red Sea | 0.1508 * (0.0000) | 0.2549 * (0.0000) | 0.6235 * (0.0000) |
| Indian Ocean | 0.2357 * (0.0000) | 0.3194 * (0.0000) | 0.3215 * (0.0000) |
| Region | NO2 VCD of Shipping Route | NO2 SCD of Shipping Route | ||
|---|---|---|---|---|
| Original | Adjusted | Original | Adjusted | |
| Medit. Sea | −0.2523 (0.1376) | −0.1857 (0.2781) | 0.5567 * (0.0004) | 0.4582 * (0.0049) |
| Red Sea | 0.1992 (0.2442) | 0.6824 * (0.0000) | 0.6003 * (0.0001) | 0.7103 * (0.0000) |
| Indian Ocean | −0.2244 (0.1883) | −0.1915 (0.2632) | 0.5544 * (0.0005) | 0.5188 * (0.0012) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Emmerich, M.T.M.; Voors, R.; Ording, B.; Lee, J.-S. A Systematic Approach to Identify Shipping Emissions Using Spatio-Temporally Resolved TROPOMI Data. Remote Sens. 2023, 15, 3453. https://doi.org/10.3390/rs15133453
Kim J, Emmerich MTM, Voors R, Ording B, Lee J-S. A Systematic Approach to Identify Shipping Emissions Using Spatio-Temporally Resolved TROPOMI Data. Remote Sensing. 2023; 15(13):3453. https://doi.org/10.3390/rs15133453
Chicago/Turabian StyleKim, Juhuhn, Michael T. M. Emmerich, Robert Voors, Barend Ording, and Jong-Seok Lee. 2023. "A Systematic Approach to Identify Shipping Emissions Using Spatio-Temporally Resolved TROPOMI Data" Remote Sensing 15, no. 13: 3453. https://doi.org/10.3390/rs15133453
APA StyleKim, J., Emmerich, M. T. M., Voors, R., Ording, B., & Lee, J. -S. (2023). A Systematic Approach to Identify Shipping Emissions Using Spatio-Temporally Resolved TROPOMI Data. Remote Sensing, 15(13), 3453. https://doi.org/10.3390/rs15133453