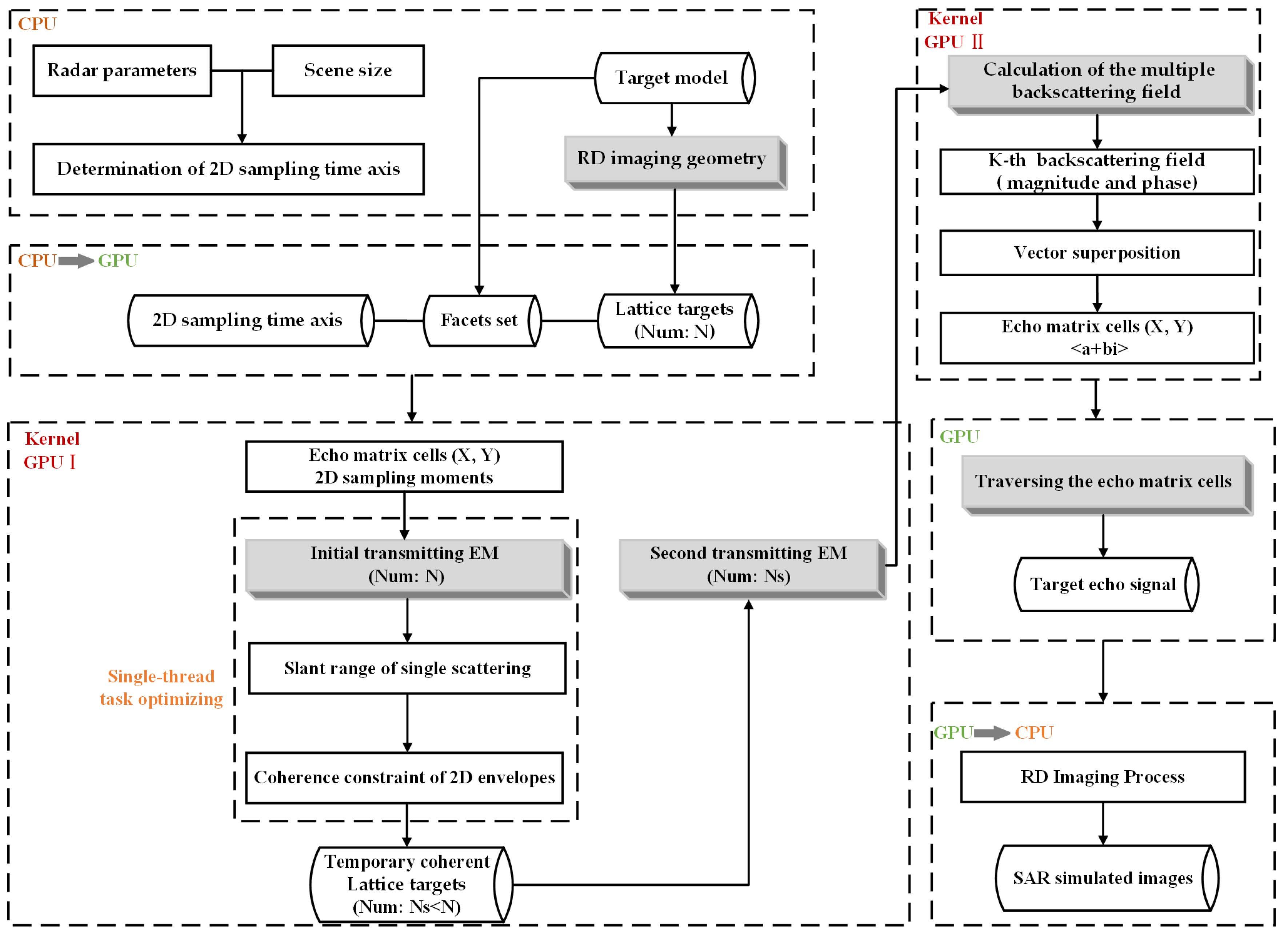
The calculation task of the multiple backscattering field is focused on the real-time dynamic recording of the magnitude and phase of multiple scattering between electromagnetic waves and target. We first used RD imaging geometry to discretize the target model surface facets within the radar beam footprint into lattice targets, and then by combining these with the real-time transmitting position of the radar platform, the directions of the electromagnetic wave transmission can be accurately determined. Based on the simulation of electromagnetic waves transmission, according to the light-like nature of microwaves, we chose the standard illumination model as the base scattering model and improved it comprehensively. Multiple scattering paths are traced for each discrete electromagnetic wave using the ray tracing algorithm, and the multiple scattering magnitude and phase are recorded dynamically in real time. The propagation distance decay factor is added according to the effect of propagation distance on the attenuation of echo energy in the radar equation. We combined the polarimetric scattering theory and the small perturbation method to obtain multi-polarimetric information for each backscattering of the electromagnetic wave. In short, the calculation of the multiple backscattering field can provide the basic conditions for SAR echo simulation, and serve as the key technical support for fast echo-based SAR image simulation using the CUDA platform.
2.1. Simulation of Electromagnetic Waves Transmission
When simulating radar beams moving along the azimuth direction and scanning a scene in the computer virtual environment, large numbers of electromagnetic waves are transmitted. The key point to ensure the high fidelity of SAR simulation images is to accurately calculate incidence directions of the electromagnetic waves. In order to ensure the calculation accuracy of the transmitted directions of the electromagnetic waves, we used the RD imaging geometry theory. The target model facets in the SAR beam footprint are discretized into lattice targets, and the initial transmitted position of the electromagnetic waves can be obtained according to the preset trajectory of the radar sensor along the azimuth direction. The incidence directions of electromagnetic waves can be determined effectively by combining the lattice targets with the moving positions of the radar sensor. In addition, target latticing also provides the preconditions for calculating the multiple backscattering field using the ray tracing algorithm and the judgment of radar beam footprint and shaded areas.
The essence of target latticing is the process of reasonably eliminating invalid facets in shaded areas and finely subdividing the effective facets in the beam footprint. As is shown in
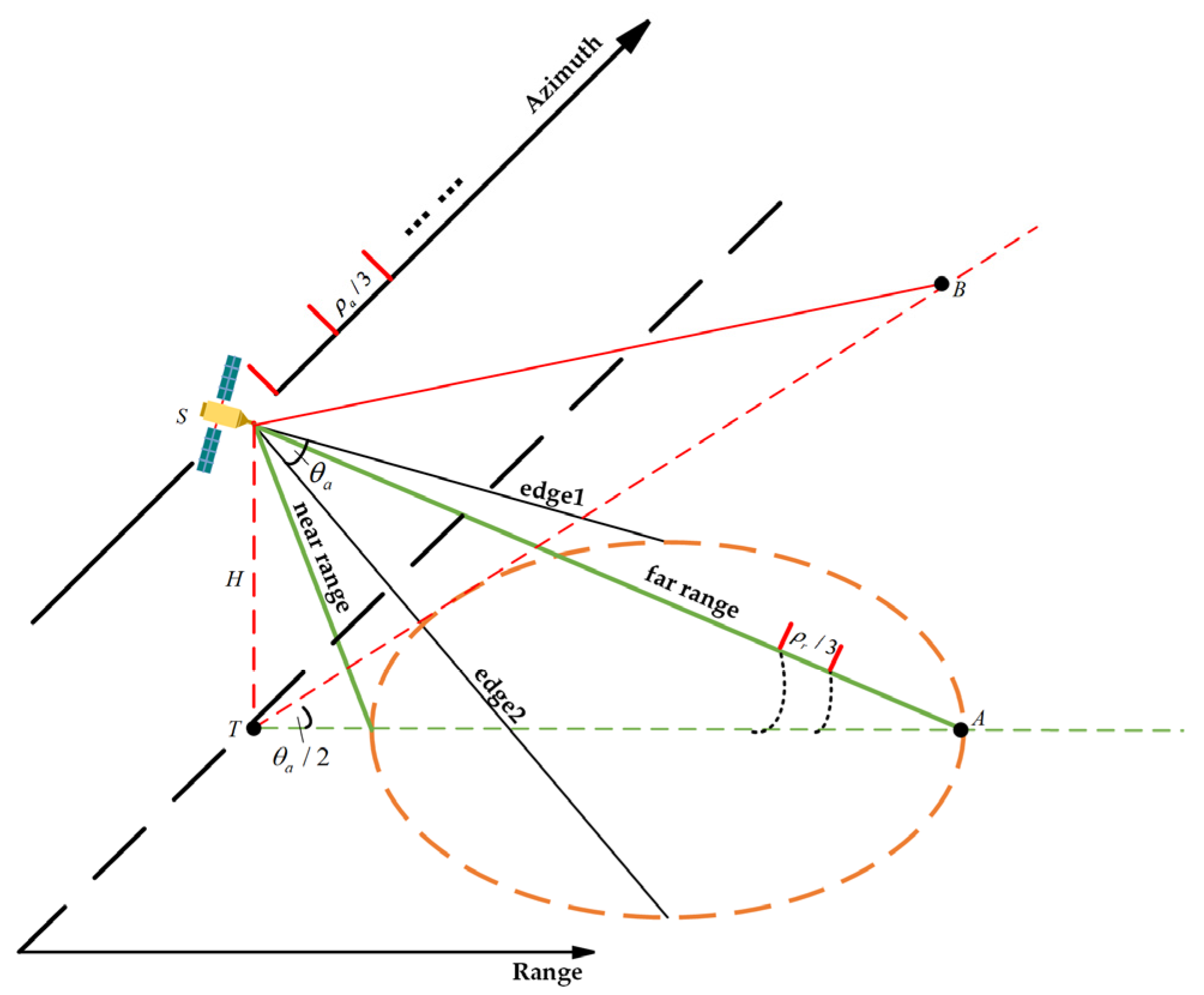
Figure 1, we first used the RD imaging geometry as the geometric basis to build the target latticing model. The center section of the radar beam is scanned along the azimuth time axis. When the squint angle is zero, the center section of the radar beam can be considered as the plane of zeros Doppler, as shown in the plane
STA in
Figure 1. The scan mode using the plane of zeros Doppler can meet the accuracy requirements for low- or medium-resolution SAR image simulation under the plane wave approximation. As the requirements related to SAR simulation image resolution increase, the synthetic aperture time grows longer and the Doppler bandwidth becomes larger, the scan mode using the plane of zeros Doppler will produce errors at the boundary between the beam footprint and the shaded areas.
In order to improve the accuracy of high-resolution SAR image simulation, referring to
Figure 1, we refined the incidence directions of discrete electromagnetic waves within the synthesized beamwidth, and used the section of real-time beam edge along the azimuth direction to scan the scene, as shown in the plane
STB in
Figure 1. We needed to rotate the incidence directions of all discrete electromagnetic waves in the plane of zeros Doppler by an angle around the vertical axis
ST in the stripmap SAR mode. Point
changes to point
B after the rotation of the plane of zeros Doppler to the beam edge. If the squint angle is zero, the rotation angle should be half of the synthesized beamwidth. If the radar squint angle is set, the rotation angle should be corrected to the sum of the squint angle and half of the synthesized beamwidth.
where
refers to the real-time incidence directions within the plane
STB.
is the real-time incidence directions within the plane of zeros Doppler.
is the rotation angle.
is the synthesized beamwidth.
is the radar squint angle.
is the azimuth beamwidth,
is the wavelength, and
is the azimuth antenna size.
Then, we further gridded the scene based on the target latticing geometric model in
Figure 1. The number of rows and columns in the scene grids are related to the sampling interval, and the setting of the lattice intervals follows Nyquist’s sampling law. In the actual tests, the lattices interval is one third of the SAR system resolution required to satisfy the Nyquist’s sampling law, and to avoid excessive subdivision of the model facets and reduce the complexity of calculating the multiple backscattering field using the ray tracing algorithm. We set the scene center as the origin of the coordinate system, and the number of rows and columns can be expressed as
where
is the number of azimuth rows and
is the number of range columns.
is the azimuth resolution and
is the slant range resolution.
is the minimum azimuth coordinate in the scene and
is the maximum azimuth coordinate in the scene.
is the near slant range and
is the far slant range.
is the platform height.
is the near ground range in the scene and
is the far ground range coordinate in the scene.
is the incidence angle. We transmitted discrete electromagnetic waves line by line along the azimuth direction, and the real-time position of the sensor can be written as
where
S are the real-time positions of the sensor.
refers to the azimuth coordinates of the sensor and
i is the index of azimuth rows. The decomposition of the incidence vector of the electromagnetic wave within the plane of zeros Doppler is zero along the azimuth direction. We divided the size of each range gate according to the preset sampling interval, and then inversed to obtain the incidence direction of each discrete electromagnetic wave from near range to far range by each range gate. The incidence directions of the discrete electromagnetic waves are accurately calculated by the radar platform height and the changing angles among the slant ranges within the plane of zeros Doppler. The incidence directions of the electromagnetic waves within the plane of zeros Doppler are then rotated around the vertical axis
ST to the section of real-time beam edge along the azimuth direction. The above is the basic preparation for simulating SAR beams scanning, and the specific process can be expressed by Equation (4)
where
j is the index of range columns.
is the real-time slant range according to slant range resolution.
and
are the adjacent incidence angles.
is the incidence direction.
is the squint angle of the beam center in the linear geometry, measured from the plane of zero Doppler.
Combining Equations (3) and (4), we scanned the scene with the section
STB of the edge of the radar beams and simulated large numbers of discrete electromagnetic waves transmitting into the scene. Each discrete electromagnetic wave needs to traverse the whole model facets set, and obtain the propagation distance from the sensor to the intersected facet. The propagation distance can be obtained through the geometric relationship among the intersection point, the sensor position, the incidence direction, the normal vector of the surface facets, and one point on the surface element using Equation (5).
where
P is the intersection point coordinate.
S is the real-time position of the sensor, and
t is the propagation distance from
S to
P.
is the normal vector of the facet.
is a random vertex point of the facet. When each electromagnetic wave intersects with the target model, the number of intersected facets may be more than one. We selected the facet at the minimum of
t as the illuminated facet in the beam footprint, and the boundary between the beam footprint and the shadow area could thus be determined. Finally, we obtained the coordinates of the intersection points and accurately discretized the facets in the beam footprint into lattice targets.
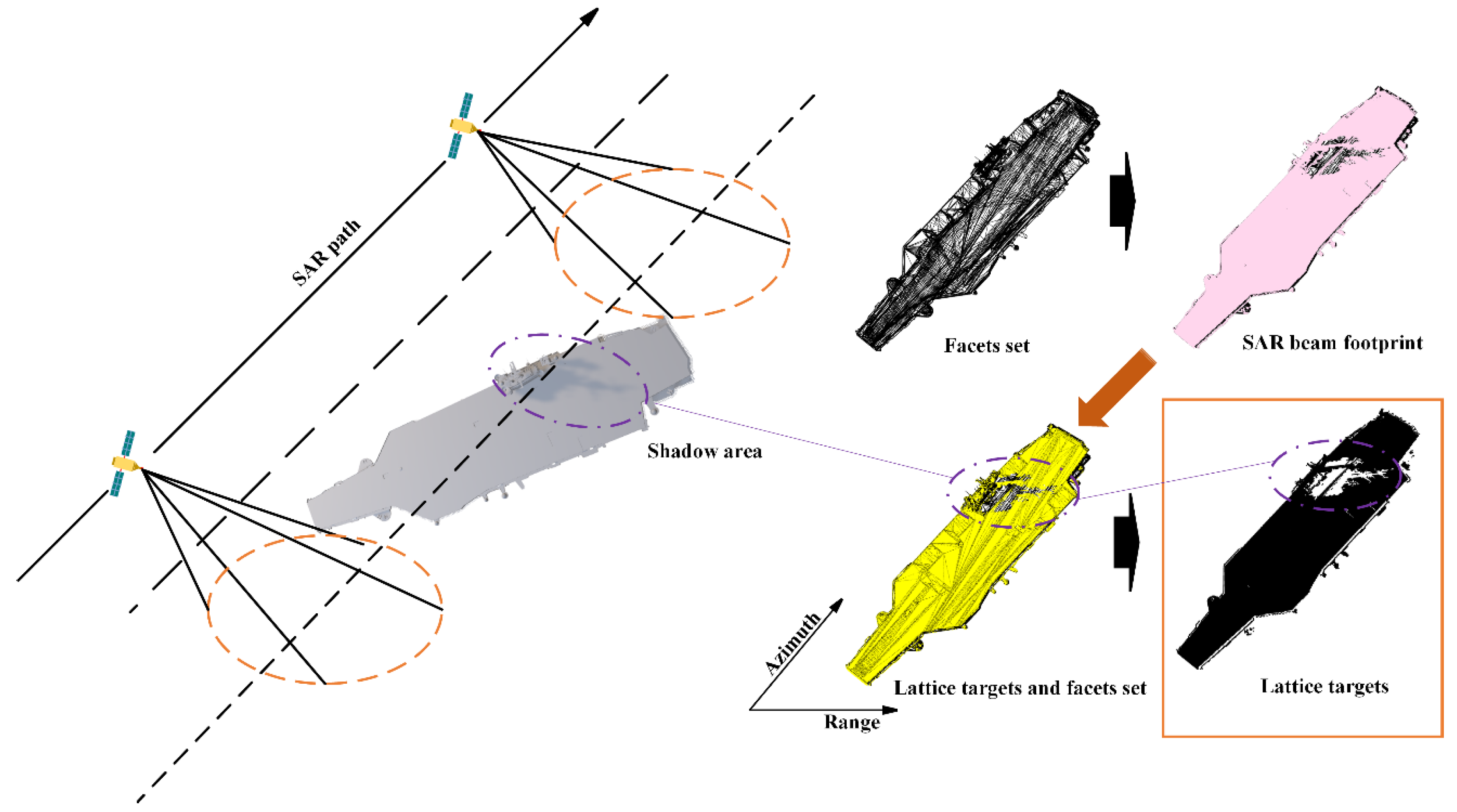
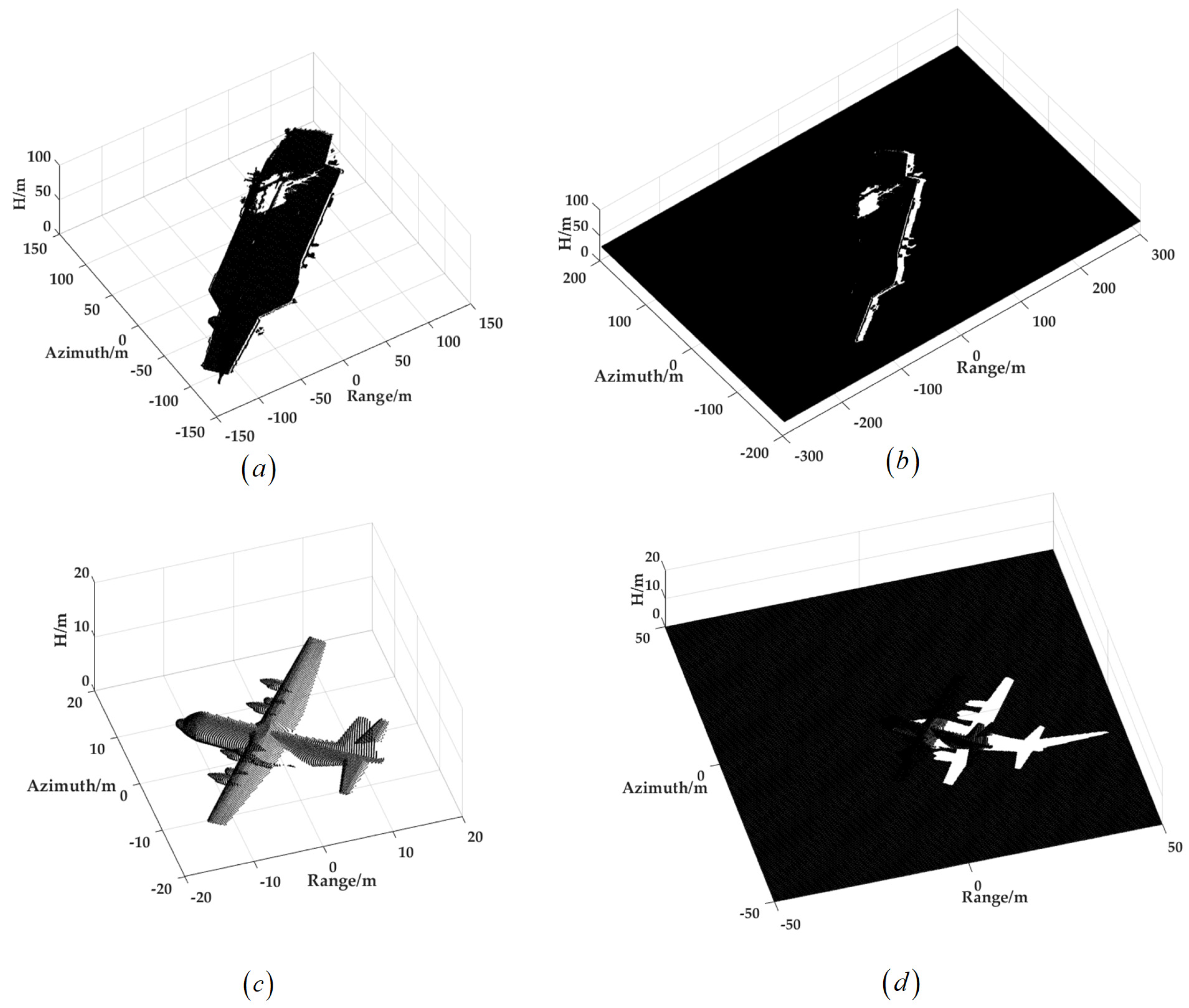
The target model is scanned using the target latticing model, as shown in
Figure 2. The dual-scale subdivision idea is also adopted in the process of target latticing, with large surface facets for planar parts and small surface facets for curved parts of the target model. During the whole process of target latticing, the target model still maintains the dimensions of irregular facets and does not uniformly subdivide all facet edges to the wavelength scale. To a certain extent, it can effectively avoid the excessive subdivision of the model facets and reduce the complexity of calculating the multiple backscattering field using the ray tracing algorithm in
Section 2.2.
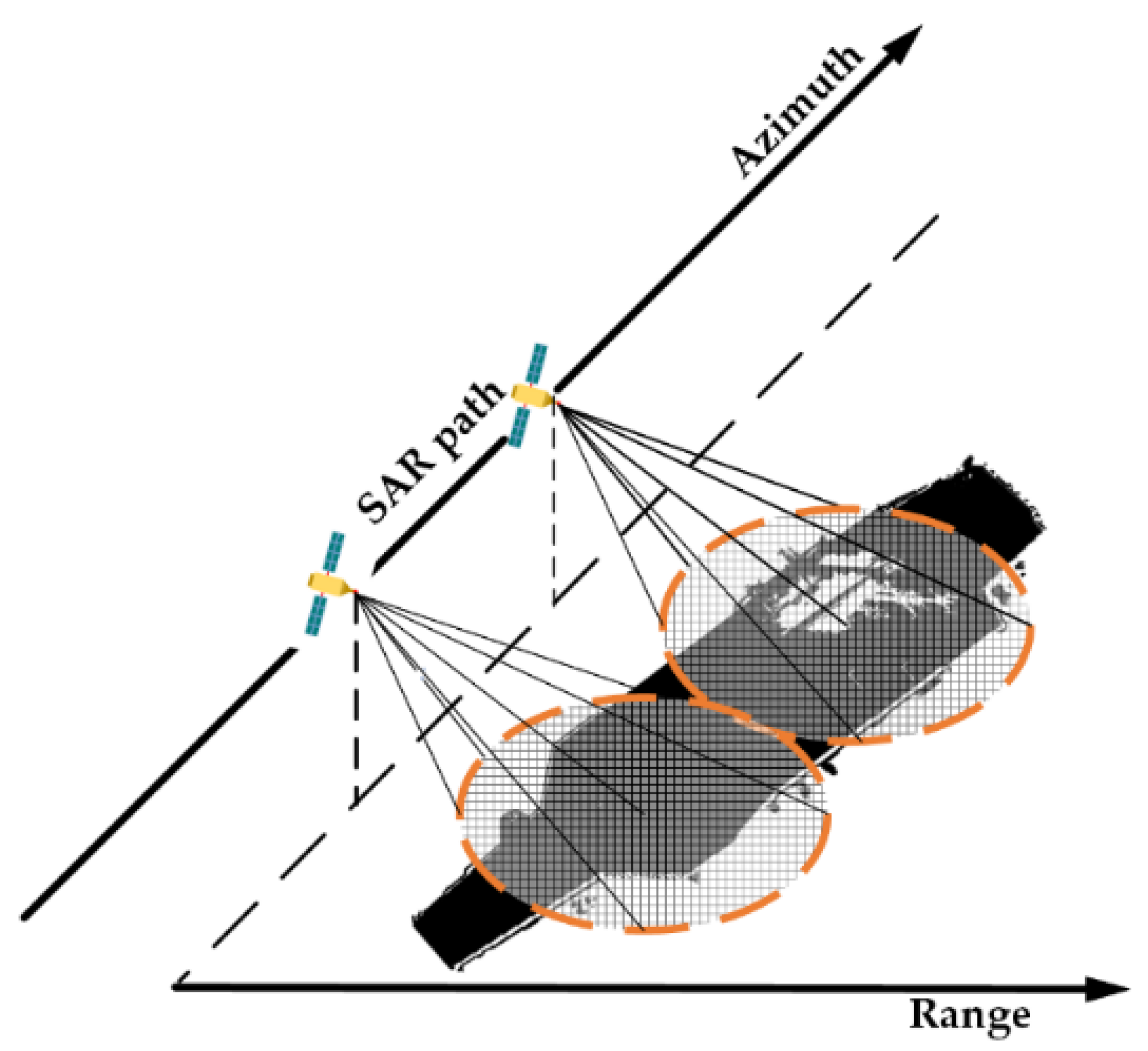
After the lattice targets are obtained, as shown in
Figure 3, large numbers of electromagnetic waves can be simulated and transmitted into the scene by combining the real-time position of the sensor and the coordinates of the lattice targets. This simulation method can make the incidence directions of electromagnetic waves within the radar beamwidth more refined and overcome the defect of beam pointing ambiguity under the plane wave assumption. The task of electromagnetic wave transmission can be expressed by Equation (6).
where
are the incidence directions and
are the electromagnetic waves transmitting into scene.
S are the real-time positions of the sensor.
P are the coordinates of the lattice targets.
The above simulation of electromagnetic waves transmission is based on the RD imaging geometry model. It can effectively determine the SAR beam footprint and shadow areas, and discretize the target model surface facets in the radar beams footprint into lattice targets. The method strictly follows the real working mechanism of SAR, which can improve the certainty and accuracy of the incidence directions for transmitting electromagnetic waves. We propose the above electromagnetic wave transmission simulation method mainly to further provide key technical support for calculating the multiple backscattering field using the ray tracing algorithm shown in
Section 2.2.
2.2. Calculation of the Multiple Backscattering Field
Based on the simulation of electromagnetic wave transmission, we can start to calculate the multiple backscattering field of the target. During the propagation of the microwave, when hitting a target of electronically large size, it will be reflected and has the nature of a light wave. In other words, the shorter the wavelength of the microwave is, the more similar its propagation nature is to geometric optics. In addition, in the derivation of the physical optics (PO) equation, we find that the key variable for calculating the backscattering field of the target facet is the angle between the incident direction of the electromagnetic wave and the normal vector of the target facet, and the rest of the parameters are auxiliary. The physical illumination model can be described comprehensively as the function of the angle between the incident direction of the electromagnetic wave and the normal vector of the facet, the angle between the normal vector of the facet and the received direction, the facet’s material properties, multi-polarimetric information and the target backscattering amplitude. Advanced RaySAR software also uses this backscattering model [
29,
30], which has a strong algorithmic inclusion. Therefore, we chose the standard illumination model as the base scattering model, and comprehensively improved it by using the ray tracing algorithm, radar equation and the polarimetric scattering theory. At the same time, we also considered that there are some variations in the initial incidence direction and propagation period of each discrete electromagnetic wave transmitted for each lattice target at the corresponding synthetic aperture time, which makes the backscatter coefficient of each lattice target more time-variable.
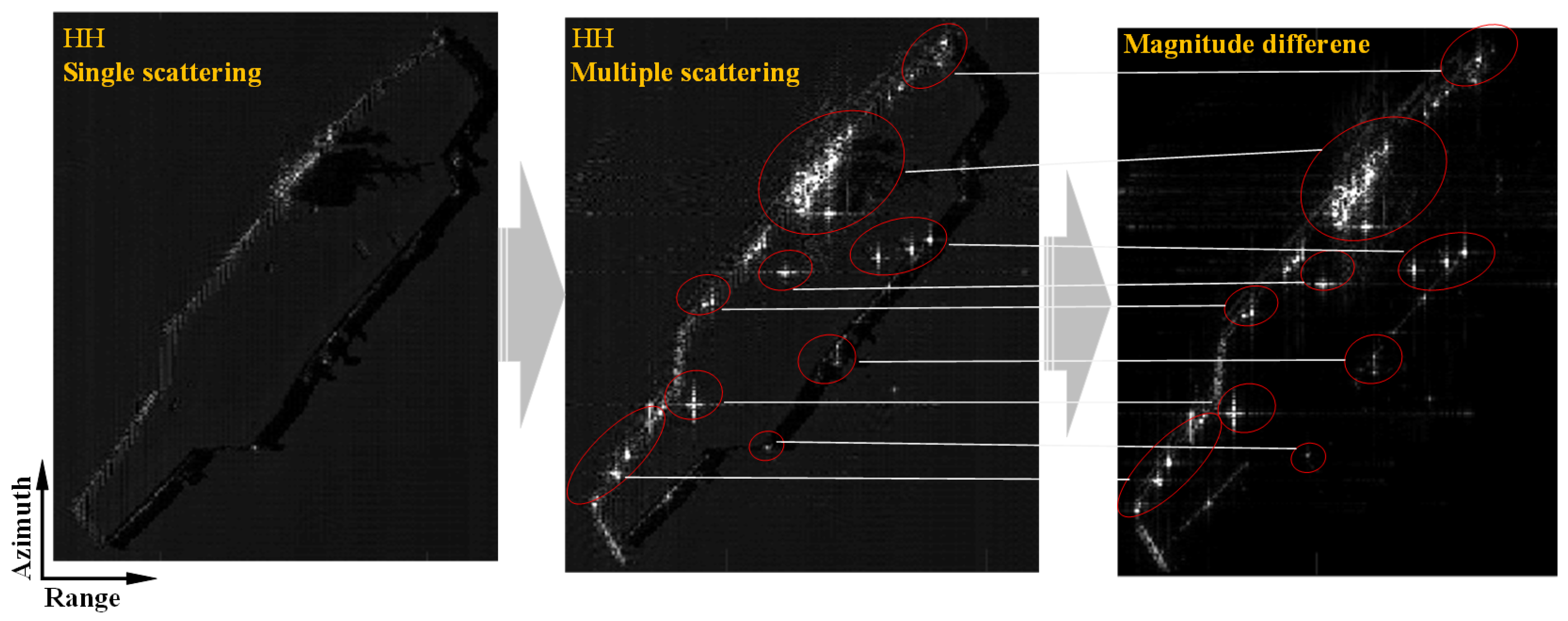
Each discrete electromagnetic wave is the basic unit being processed directly in the process of obtaining the total backscattering field for the whole target. We first focused on calculating the magnitude and phase of the backscatter coefficient of each discrete electromagnetic wave. The obtained magnitude and the phase of the multiple backscattering are vectors superimposed as the backscattering field of each discrete electromagnetic wave. The backscattering fields of all the discrete electromagnetic waves transmitted into the scene are vector-superimposed as the total backscattering field of the whole target.
The specific processes of calculating the multiple backscattering field of the target are as follows.
Firstly, we adopted the “go–stop” mode as the geometric basis for the SAR sensor to receive and transmit electromagnetic waves. The entire backscatter model has only one unique radiation source, and the exact location of the radiation source is determined by the coordinates of the radar sensor moving in real time along the azimuth. The “go–stop” mode can meet the airborne SAR echo simulation accuracy requirements, and the SAR sensor transmits discrete electromagnetic waves to the scene to be simulated sequentially along the azimuth time axis. The linear frequency modulation signal transmitted by radar can be written as
where
is the pulse duration and
is fast time along the range direction.
is the range frequency modulation rate and
is the carrier frequency.
is the rectangular envelope. The echo signal can be given by
where
is the real-time slant range from the sensor to the point target.
is the slow time along the azimuth direction. The real-time changes of
can generate the Doppler frequency history. The response signal after demodulation can be written as
where
is the range envelope and
is the range phase.
is the azimuth envelope and
is the Doppler phase. When designing the CUDA kernel function in
Section 3.1, the two-dimensional (2D) envelopes can constrain and filter the lattice targets in real time. After adopting this “go–stop” mode, the PRF and range sampling rate need to be set reasonably to ensure the performance of range and azimuth ambiguities. It is usually required that the PRF of the radar system is more than 1.1 times the Doppler bandwidth
, and the pulse repetition period is greater than the ground scene delay corresponding to the 3db range beamwidth. Therefore, the PRF should satisfy the constraint given by the following Equation (10):
The platform speed of airborne SAR is usually low, and we can set the PRF to about 1.4 times the azimuth bandwidth for improving the SAR SNR in our tests.
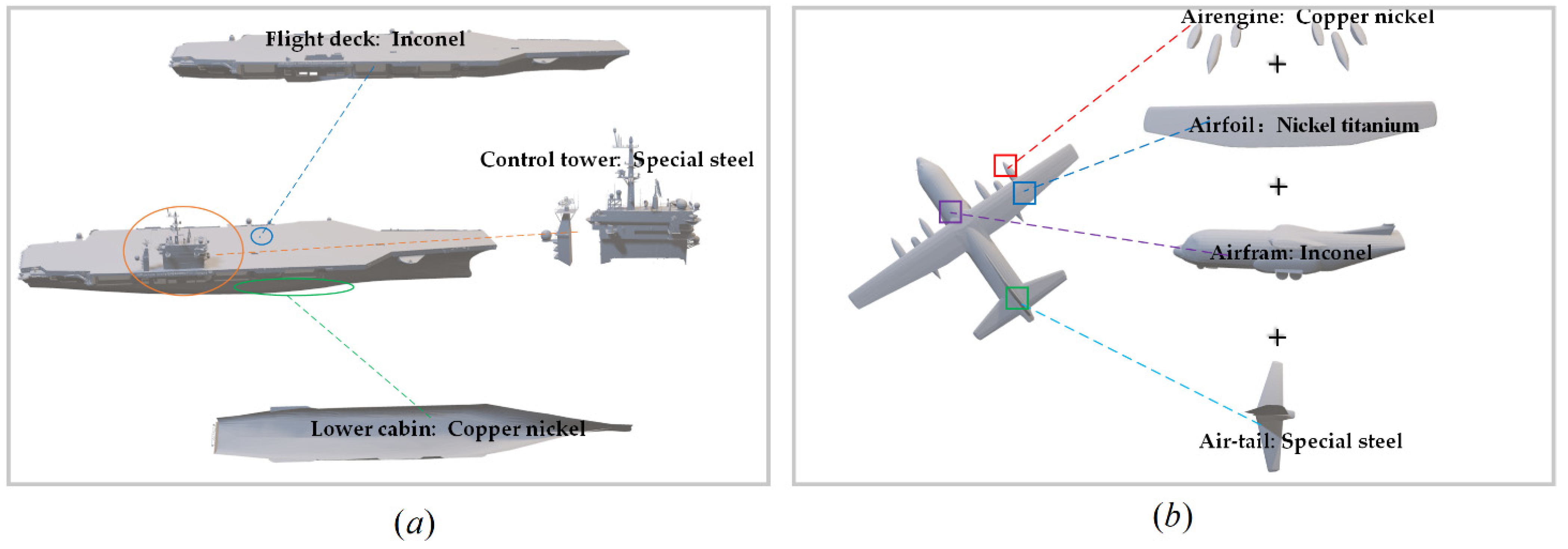
Secondly, we combine the real properties of the non-transparent material of the target to be simulated. The types of electromagnetic wave interaction with the target surface are fully considered in the tests, including specular reflection, subsurface reflection, diffuse reflection and absorption, not including refraction and transmission [
34,
35,
36,
37]. The parameters of the target material properties include specular reflection coefficient, specular reflection index, relative permittivity, diffuse reflection coefficient and energy decay coefficient, while ensuring the fidelity of the target backscatter coefficient obtained using the ray tracing algorithm. According to the quantitative relationship between electromagnetic wave propagation distance and echo energy in the radar equation, the fourth power of the real-time propagation distance is taken as the distance decay factor. The multiple backscattering field of each discrete electromagnetic wave can be expressed by Equation (11).
where
represents the multiple backscattering field of each electromagnetic wave, which also points out that obtaining the magnitude and phase of multiple scattering is the key to the whole simulation test.
is the magnitude at the
k-th scattering, which is a complex function of the target material properties and propagation distance, followed by a detailed derivation process.
is the phase at the
k-th scattering, which is related to the real-time slant range and contains both range and Doppler phase.
K is the total number of scatterings.
is the diffuse reflection coefficient and
is the specular reflection coefficient.
is the relative permittivity of the target material.
is the specular reflection index.
is the fourth power of the real-time propagation distance.
is the energy decay coefficient.
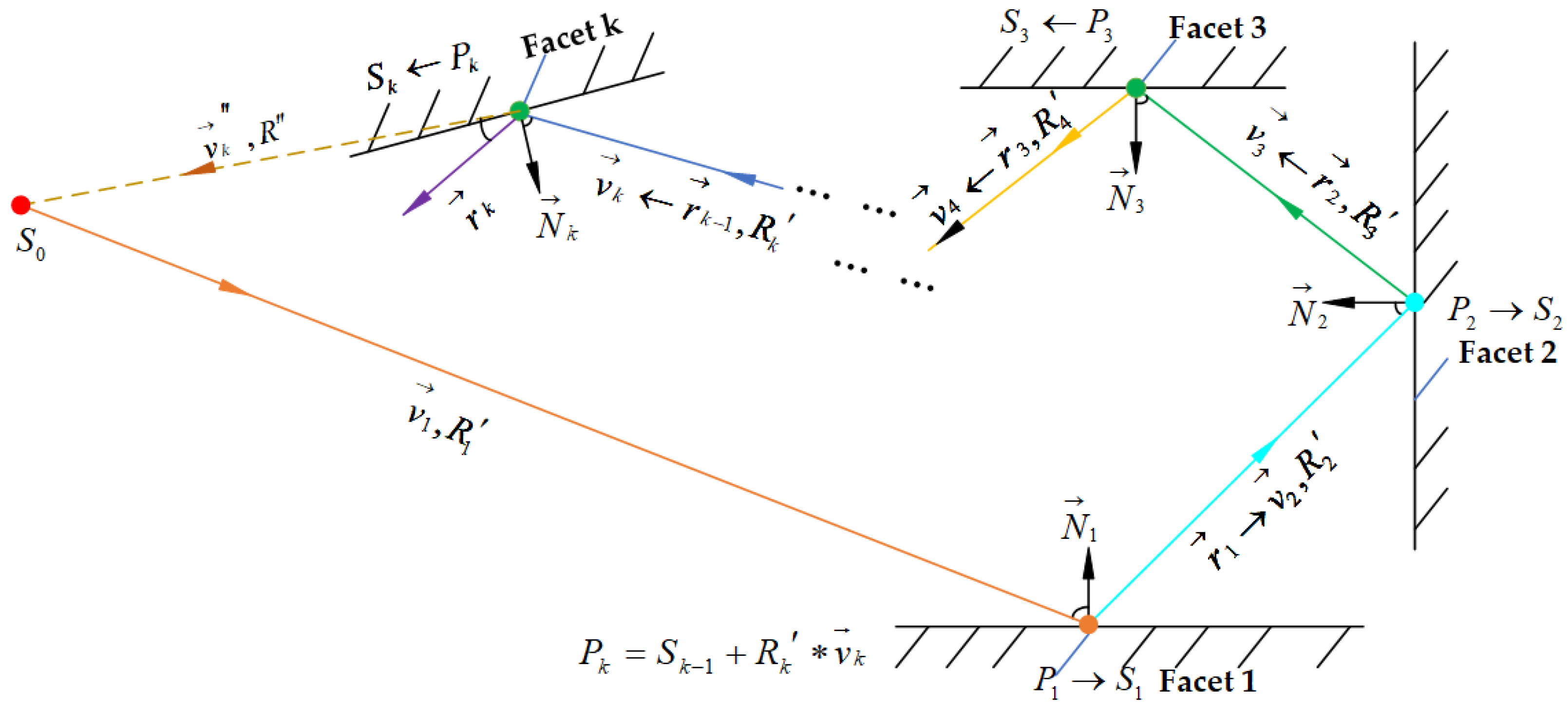
Referring to
Figure 4, it should be noted that during the process of tracing the multiple scattering paths of electromagnetic waves, the types of interacted model parts are changing, so the material properties and normal vectors of the intersected surface facets are constantly changing, and the energy and polarimetric states of the electromagnetic waves are also changing in real time. The surface material of each target part is the composite with a certain gloss and roughness, and specular and diffuse reflections energy are the main components of the target backscatter energy. In fact, the diffuse and specular reflection components are derived from the microsurface theory. When the normal vectors of micro facets are more disordered, it means the anisotropy index of micro facets is larger and the target surface is macroscopically rougher, meaning the scattered energy at the intersection between electromagnetic waves and the target surface will be scattered in all directions. On the contrary, when the normal vectors of micro surface facets are more orderly, it means the scattered energy at the intersection between electromagnetic waves and the target surface will be concentrated along the specular reflection direction. Combined with the actual physical properties of the target surface material, reasonable adjustments of the material parameters can control the anisotropy index of the normal vectors of the micro facets.
Therefore, in the process of calculating the energy of diffuse and specular reflection, we comprehensively consider the effects of the surface material properties of each model part, the variable polarization of electromagnetic waves and the propagation distance on the backscatter magnitude. In addition, we highlight the comprehensive effects of two key angles on the backscattering magnitude when multiple scattering occurs; one is the angle between the incidence direction and the facet normal vector, and the other is the angle between the reflection direction and the receiving direction. Based on the actual scattering mechanism of electromagnetic waves with the target surface and the polarization principle, we designed the magnitude model of multiple backscattering, and the
in Equation (11) can be expressed by Equation (12). It is worth noting that some key variables of the magnitude model are preset here, followed by a detailed derivation process, mainly used to illustrate the logic of building the model.
where
is the backscatter energy at the
k-th scattering.
is the forward incident energy at the
k-th scattering.
is the initial value of the electromagnetic wave energy.
is the magnitude of the k-th scattering. is the real-time slant range at the k-th scattering. represents the mechanism of diffuse energy scattering in all directions. is the k-th polarimetric reflection coefficient, which is related to the material permittivity and the local incidence angle, followed by a detailed derivation process. is the receive direction from the intersection point to the real-time sensor position . is the distance from scattering intersection to . is the distance from the k-th intersection point to the real-time sensor position .
Based on the above analysis, real-time calculations of the forward incident energy, time-varying propagation direction, reflection direction and intersection coordinates, propagation distance is the key to calculating the multiple backscattering field. The electromagnetic wave follows the law of the conservation of energy during the process of multiple scattering, and the propagation energy continues to decay. As shown in
Figure 4, each electromagnetic wave intersects with different model parts, and the material properties of each part of the facets are different and have different effects on the propagation energy decay. We set the energy decay threshold in tests to effectively prevent electromagnetic waves from entering dead loops when they hit the cavity structure. The energy decay during the process of multiple scattering can be represented by Equation (13)
where
is set to 1.0 as the initial value of the electromagnetic wave energy.
is the energy decay coefficient of the model facets.
is set to 0.1 as the energy threshold value. Setting the energy decay threshold also allows for the self-judgment termination of tracking for each of the complex multiple scattering paths of discrete electromagnetic waves.
The essence of simulating multiple scattering is to simulate the process of the iterative propagation of electromagnetic waves. The ray tracing algorithm is mainly used to implement the tracing of multiple scattering paths for electromagnetic waves. The specular reflection direction and intersection coordinates of the electromagnetic wave at the
-th scattering are used as the new incidence direction and new transmitted position of the electromagnetic wave at the
k-th scattering, respectively. Therefore, we need to accurately calculate the specular reflection direction and the intersection coordinates with the target surface at each scattering of electromagnetic waves, completing the next round of scattering simulations of electromagnetic waves. Based on the simulation of electromagnetic wave transmission in
Section 2.1, the initial incidence direction and transmitted position of the electromagnetic wave are determined. The intersected model’s surface facets, the intersection coordinates and the specular reflection directions can be iteratively obtained when each scattering occurs by combining Equation (5) and Fresnel’s law of reflection. Fresnel’s law of reflection can be used to determine the specular reflection direction of electromagnetic waves after each scattering, the incidence direction of electromagnetic waves, the normal vector of the intersected facet and the specular reflection direction in the same plane. At the
k-th scattering, the specular reflection direction of the electromagnetic wave can be calculated by Equation (14)
where
is the specular reflection direction for forward ray tracking at the
k-th scattering.
is the incidence direction at the
k-th scattering. The specular reflection direction
of the electromagnetic wave at the
-th scattering is used as the new incidence direction
at the
k-th scattering. The intersection coordinates of the multiple scattering can be used to calculate the real-time slant range corresponding to the multiple scattering. As shown in
Figure 4, the real-time slant range at the
k-th scattering can be obtained by Equation (15),
where
is the real-time slant range at the
k-th scattering.
is the real-time position of the sensor.
P is the intersection coordinate at each scattering. Taking
into the SAR impulse response (Equation (9)) enables us to obtain the corresponding real-time phase of Doppler and range for pulse compression imaging processing. The echo signal is limited in real time by the 2D envelope along the azimuth and range directions during the recording process to ensure the coherence of the echo signal. The electromagnetic wave transmitted at the certain azimuth moment and its real-time phase
can be calculated by Equation (16),
The magnitude and phase of multiple scattering can be obtained by combining Equations (12) and (16). We can obtain the multiple backscattering field of each discrete electromagnetic wave by the vector superposition of the magnitude and the phase of the multiple scattering. The theoretical total scattering number
K is adaptively determined by the energy threshold and the complexity of the target geometric structures. The complex backscattering field corresponding to each discrete electromagnetic wave can be given by Equation (17).
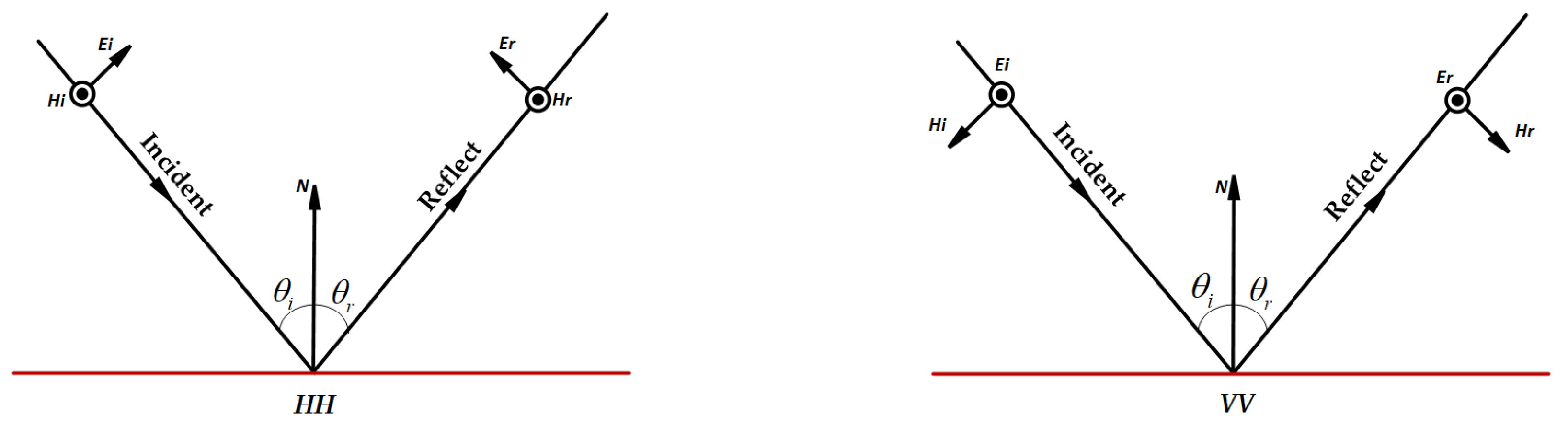
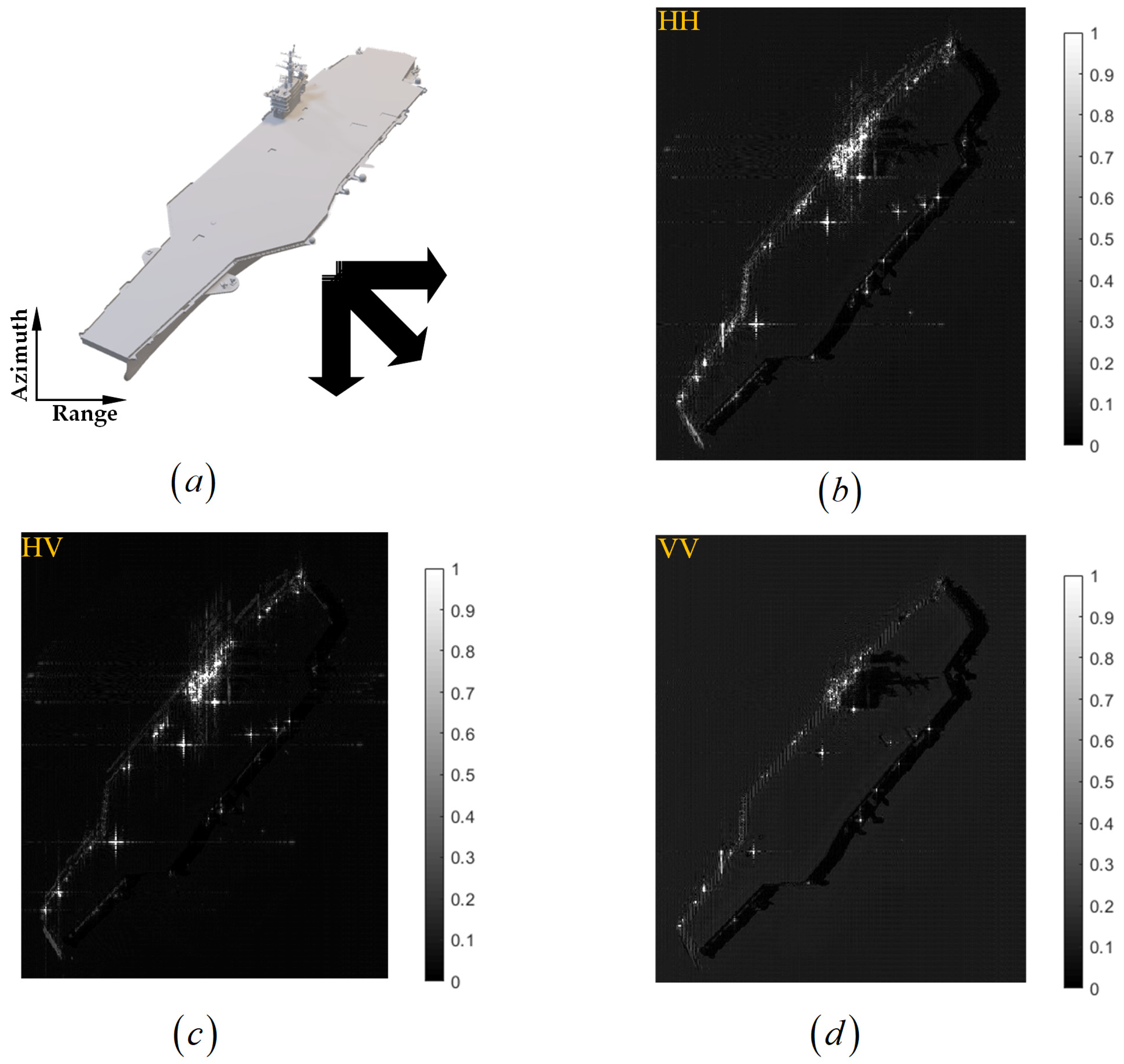
Thirdly, we combined the small perturbation method to consider the process of target polarimetric scattering as the coordinate conversion process from transmitted waves to scattered waves. The polarimetric state changes during the process of the multiple scattering of electromagnetic waves. The plane of incidence is determined by the incidence direction of electromagnetic waves and the normal vector of the model surface facet. Vertical polarization means that the electric field vector of the electromagnetic wave is perpendicular to the plane of incidence, and horizontal polarization means that the electric field vector of the electromagnetic wave is parallel to the plane of incidence, as shown. in
Figure 5.
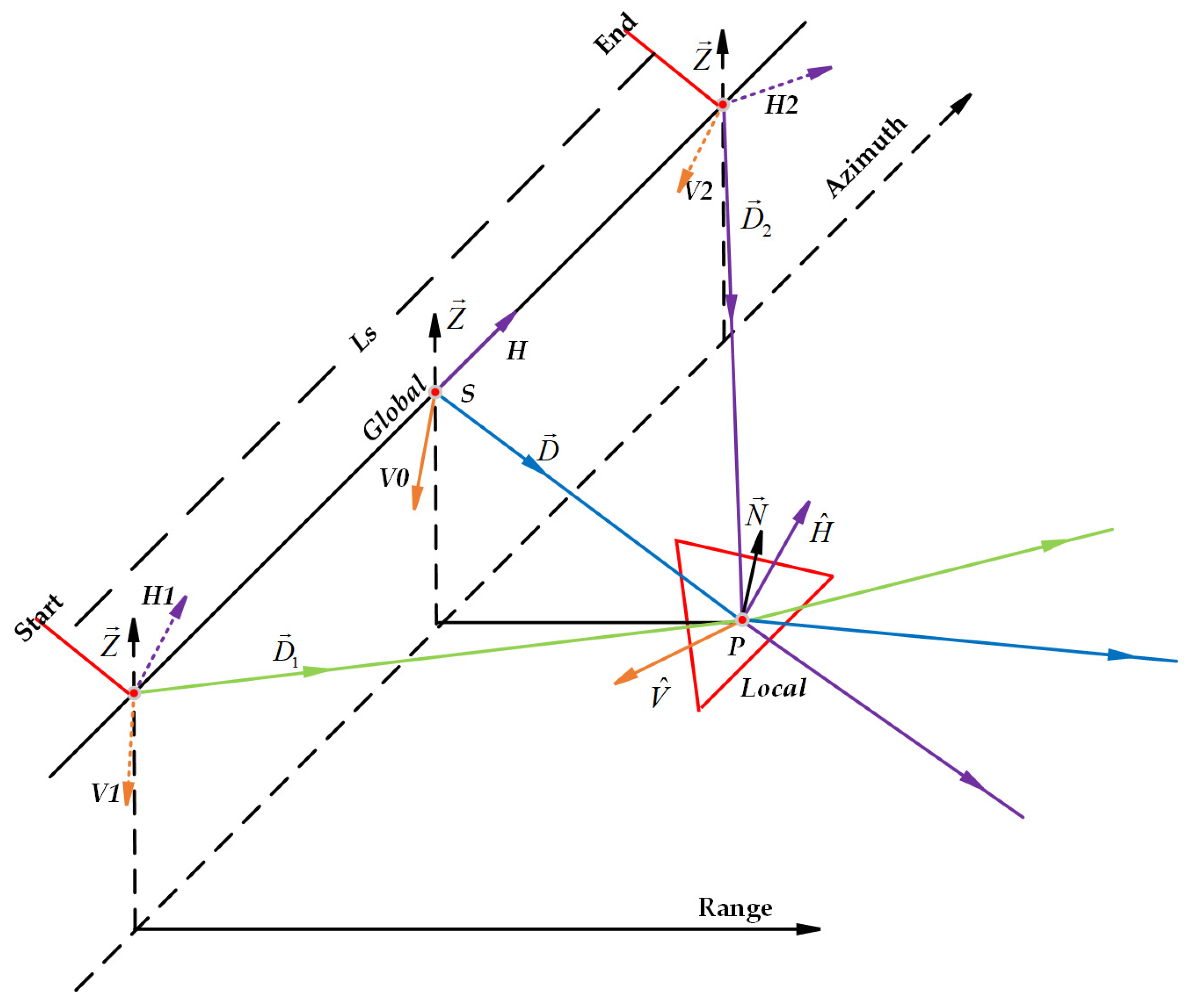
The essence of the process is to convert and record the multiple backscattering field of electromagnetic waves from a local scattering coordinate system to a global transmitting coordinate system in real time. As shown in
Figure 6, assuming the normal vector of the model surface facet as the
z-axis of the local coordinate system, we first calculated the polarimetric scattering matrix in the local coordinate system, and then rotated it by angle
α around the radar line of sight direction to obtain the polarimetric scattering matrix in the global coordinate system.
Horizontal or vertical polarization waves transmitted in the local coordinate system can only produce reflected waves with horizontal/vertical polarization. The polarimetric scattering matrix
corresponding to each discrete electromagnetic wave for the
k-th scattering in the local coordinate system can be given by Equation (18)
where
is the
k-th scattering field of local
polarization and
is the
k-th scattering field of local VV polarization.
is the local
HH polarization reflection coefficient and
is the local
VV polarization reflection coefficient. The
HV polarization cell in
is usually set to 0 in the local coordinate system. We can determine the incidence angle for multiple scattering from Equation (14), then the reflection coefficient of vertical and horizontal polarization at the intersection of the
k-th scattering in the local coordinate system can be given by Equation (19),
where
is the local
HV polarization reflection coefficient, which is usually set to 0 in the local coordinate system.
is the permittivity of target parts, and
is the local incidence angle for the model facet. The polarimetric state of the backscattering field corresponding to each discrete electromagnetic wave at the
-th scattering can be recorded in real time by combining Equations (12), (16) and (19), and the polarimetric scattering matrix at the
k-th scattering in the local coordinates system can be expressed by Equation (20)
Referring to
Figure 6, we set up two normalized orthogonal polarization bases for the global coordinates system where the radar transceiver antenna is located, and the local coordinates system was set up where the target model facet is located. The polarization bases can be calculated by Equation (21)
where
H is the global horizontal polarization vector and
V is global vertical polarization vector.
is the local horizontal polarization vector and
is the local vertical polarization vector.
is the incidence direction for point
P and
S is the real-time position of the sensor. Taking a discrete electromagnetic wave as an example, we adopted the “go–stop” mode, and
H and
V were fixed.
varies with the multiple scattering of the electromagnetic wave, which can be expounded by Equation (14).
and
are variable. Then, the local and global coordinates are transformed by the rotation about the radar line of sight through angle
α. This rotation angle
α also varies with multiple scattering and can be calculated by Equation (22),
Then, the polarimetric scattering matrix
corresponding to each discrete electromagnetic wave at the
k-th scattering in the global coordinates system can be given by Equation (23)
Taking a discrete electromagnetic wave as an example, its multiple scattering path is traced, and the magnitude and slant range of each scattering are obtained in real time. The slant range history is taken into the impulse response function to obtain the corresponding phase, and the magnitude is multiplied with the sine and cosine values of the phase corresponding to the imaginary and real parts of the echo signal, and recorded in the complex form
. The multiple backscattering subfields are vector-superimposed as the total multiple backscattering field of each discrete electromagnetic wave. The
in Equation (17) can be expressed by Equation (24).
In the case of high-resolution SAR image simulation, the azimuth bandwidth of the target echo signal increases as the synthetic aperture time becomes longer. If the plane wave assumption is still used, only the sliced energy at the radar beam’s center can be obtained, which will show some deviation in the electromagnetic scattering characteristics. Therefore, we performed multiple scattering path tracing for all discrete electromagnetic waves transmitted by each lattice target in the corresponding synthetic aperture time during the calculation of the multiple backscattering field. The types of energy contained in the 2D echo matrix of each lattice target correspond to the number of transmitted electromagnetic waves. This can effectively reproduce the time-varying characteristics of the magnitude of the backscatter coefficient for the whole target within the synthetic aperture time and overcome the defect of beam pointing ambiguity under the plane wave assumption. The path tracking depth of each electromagnetic wave is determined by the energy decay threshold and the complexity of the target model itself, minimizing human intervention.
Finally, we sequentially transmitted large numbers of discrete electromagnetic waves to the scene along the azimuth direction, and the total backscattering field of the target including multiple scattering can be accurately obtained using Equations (24) and (25). Taking the point target simulation as an example, the number of energy types in the magnitude matrix of the backscattering field is the same as the number of discrete electromagnetic waves transmitted during the SAR synthetic aperture time. This can fully reflect the time-varying characteristics of the magnitude of the target backscattering coefficient. Restricted by the 2D envelopes, the number of discrete electromagnetic waves transmitted during the synthetic aperture time is less than the number of azimuth sampling points, and the number of effective range sampling points is less than the number of range sampling points. The echo signal of the point target is discretized and the recording type can be elucidated in detail by Equation (25).
where
is the total backscattering field of the point target including multiple scattering.
is the sampling time axis along the azimuth direction, and
M is the number of azimuth sampling points.
is the 2D spatial distribution of the backscattering field.
is the spatial distribution of range gates, and
N is the number of range sampling points. The above raw echo matrix contains the backscatter energy species of
, and each
contains multi-polarimetric information.
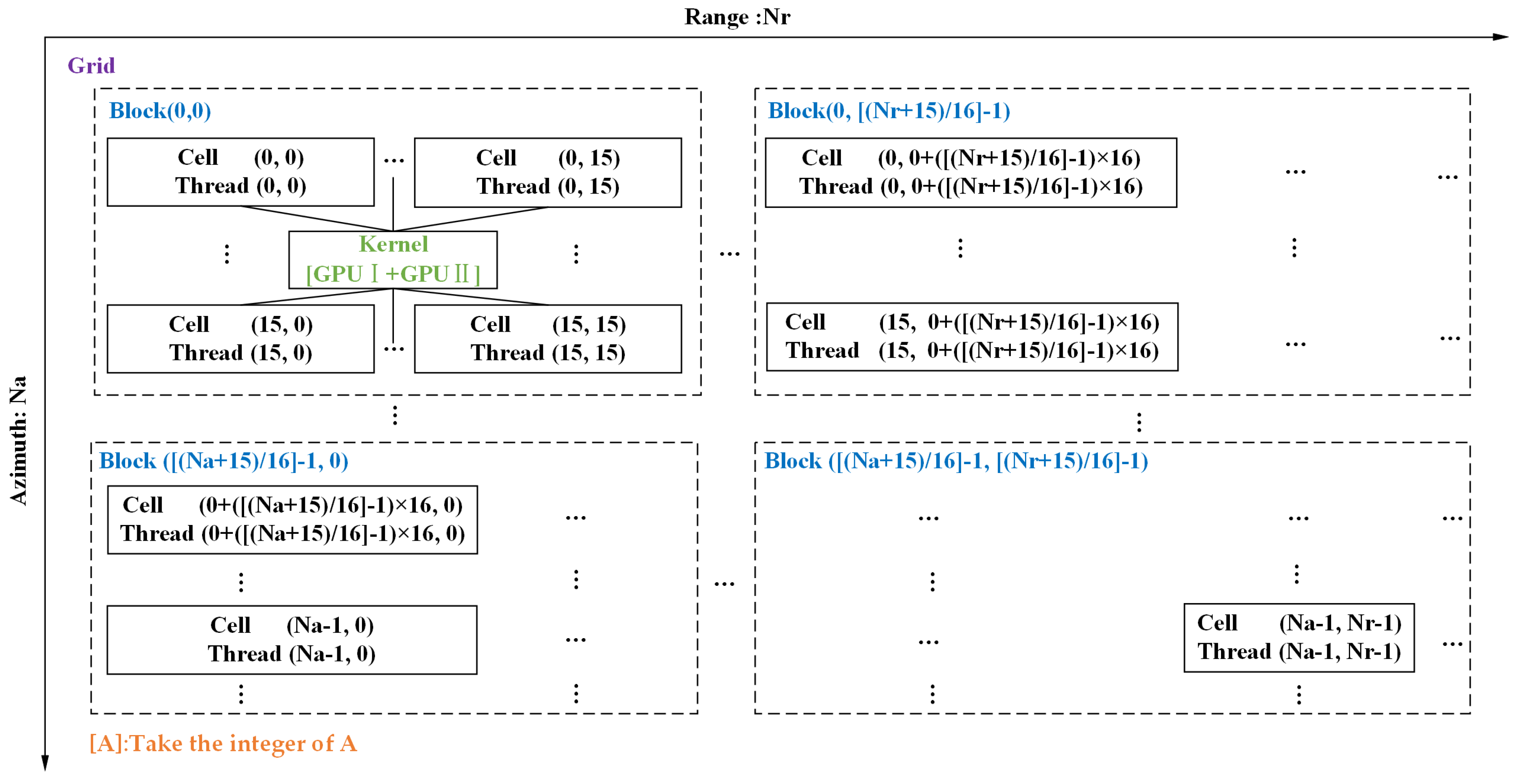
In the process of calculating the multiple backscattering field, we refined the incidence directions of electromagnetic waves within the synthetic aperture time of the target. This also reproduces the real-time dynamic records of the magnitude and phase of multiple backscattering for each discrete electromagnetic wave. In addition, the time-varying characteristic of the magnitude and the space-varying characteristic of the phase of the target backscatter coefficient can be fully reproduced, overcoming the defects of the plane wave assumption. The above method used to calculate the multiple backscattering field can ensure the fidelity of the simulated SAR image to a certain extent, but inevitably increases the computational effort. Therefore, we further designed reasonable CUDA kernel functions for accelerating the whole simulation process with the help of the CUDA platform explained in
Section 3.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}