
Performance of Wide Dynamic Photomultiplier Applied in a Low Blind Zone Lidar
 , ,
, , 
Abstract
:1. Introduction
2. Experimental Design and Methods
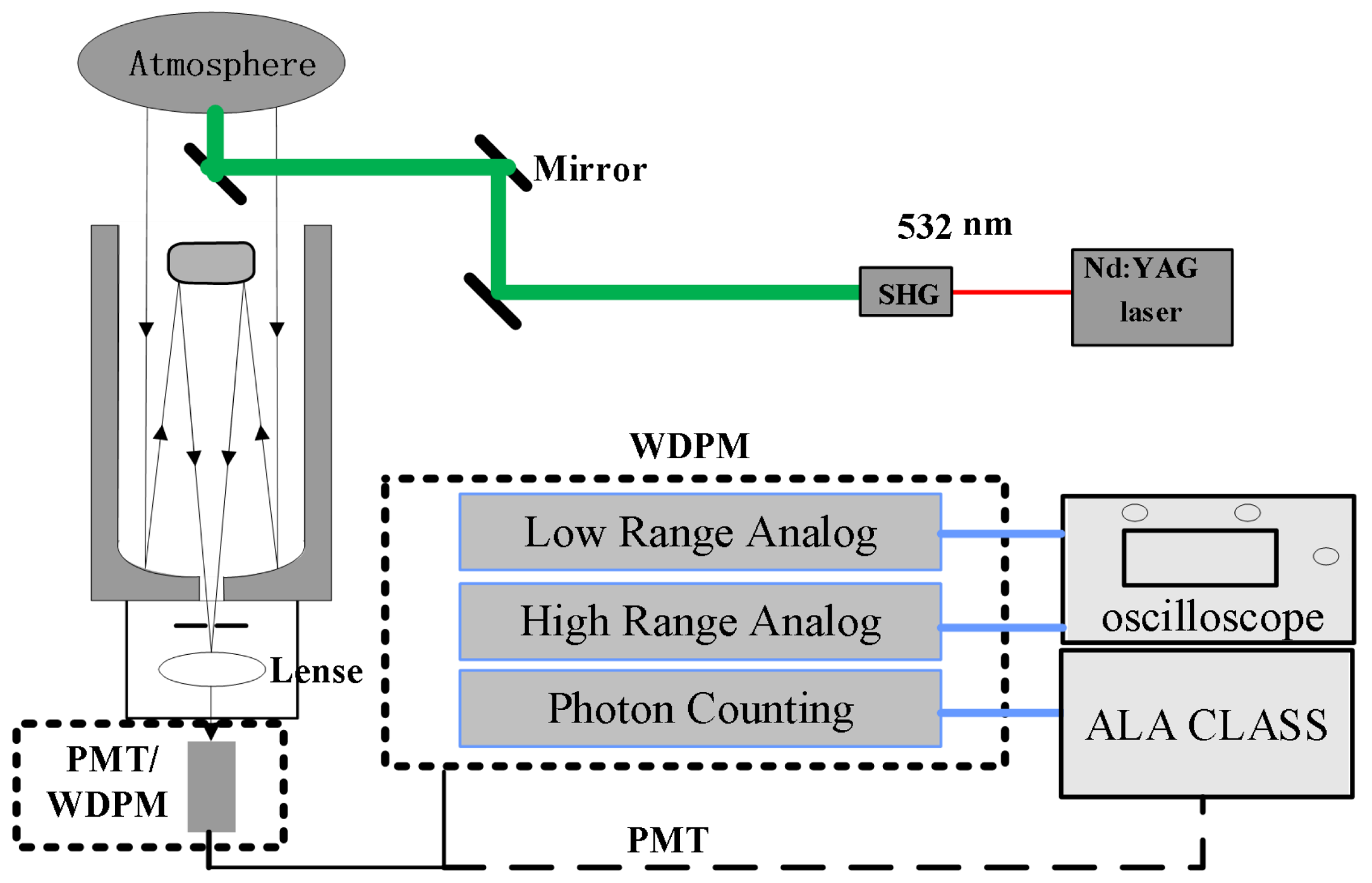
2.1. Experimental Design
2.2. Dynamic Range
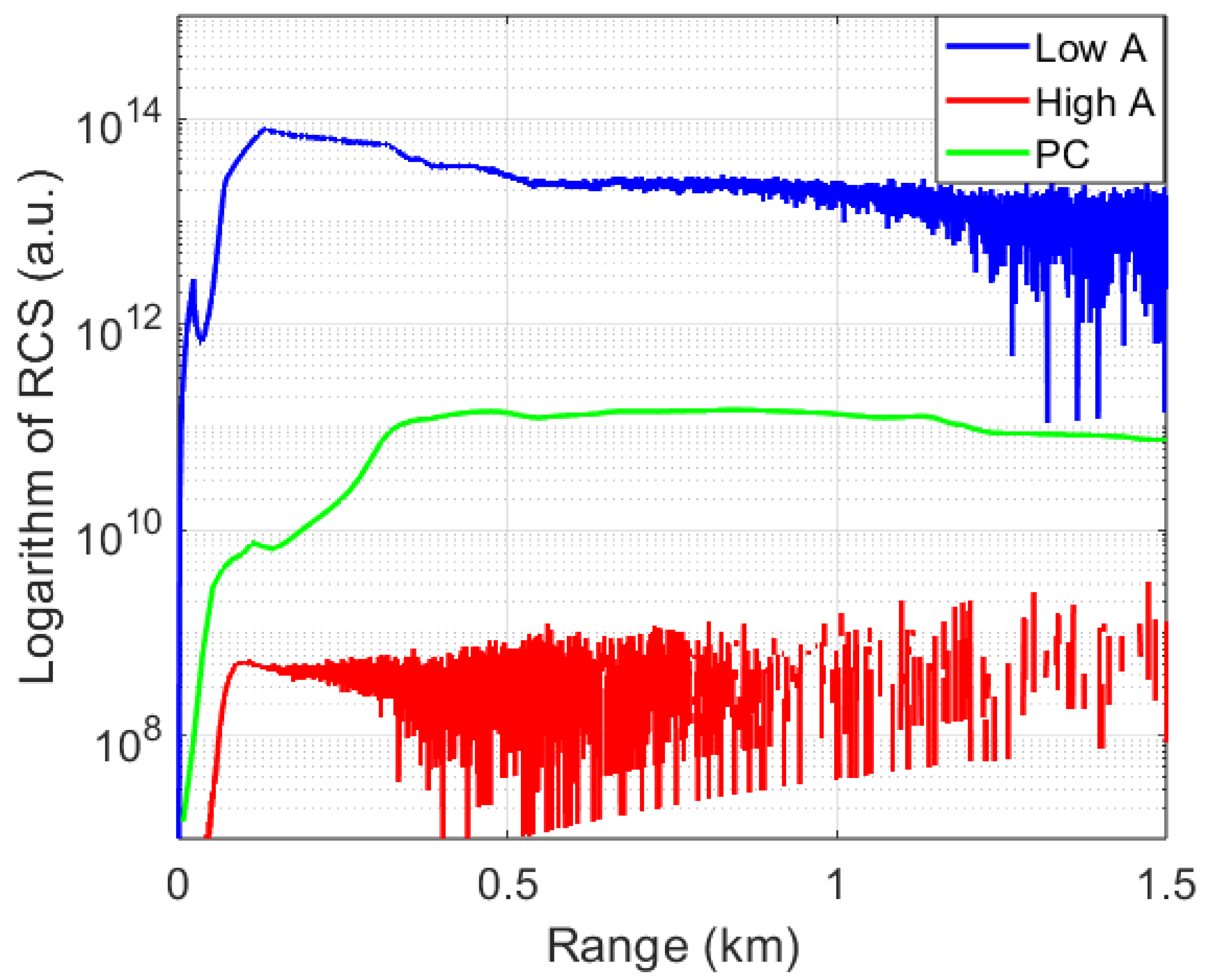
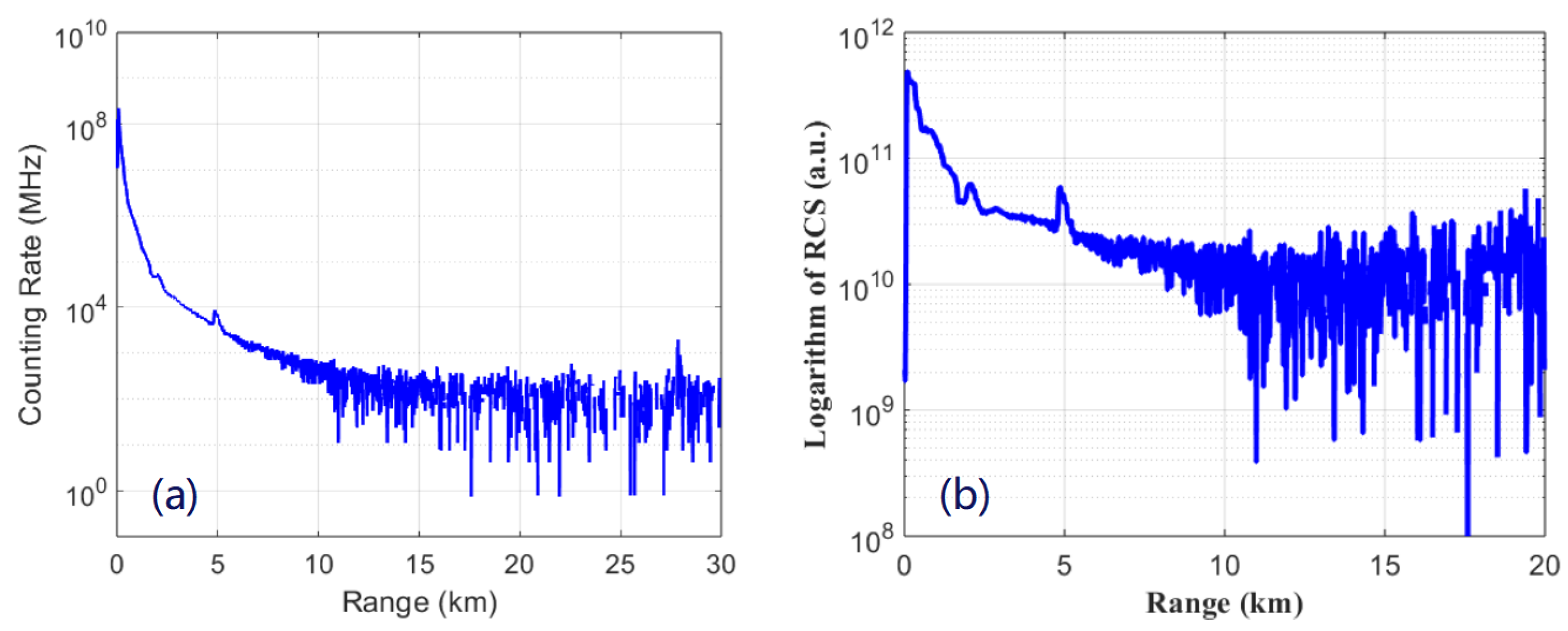
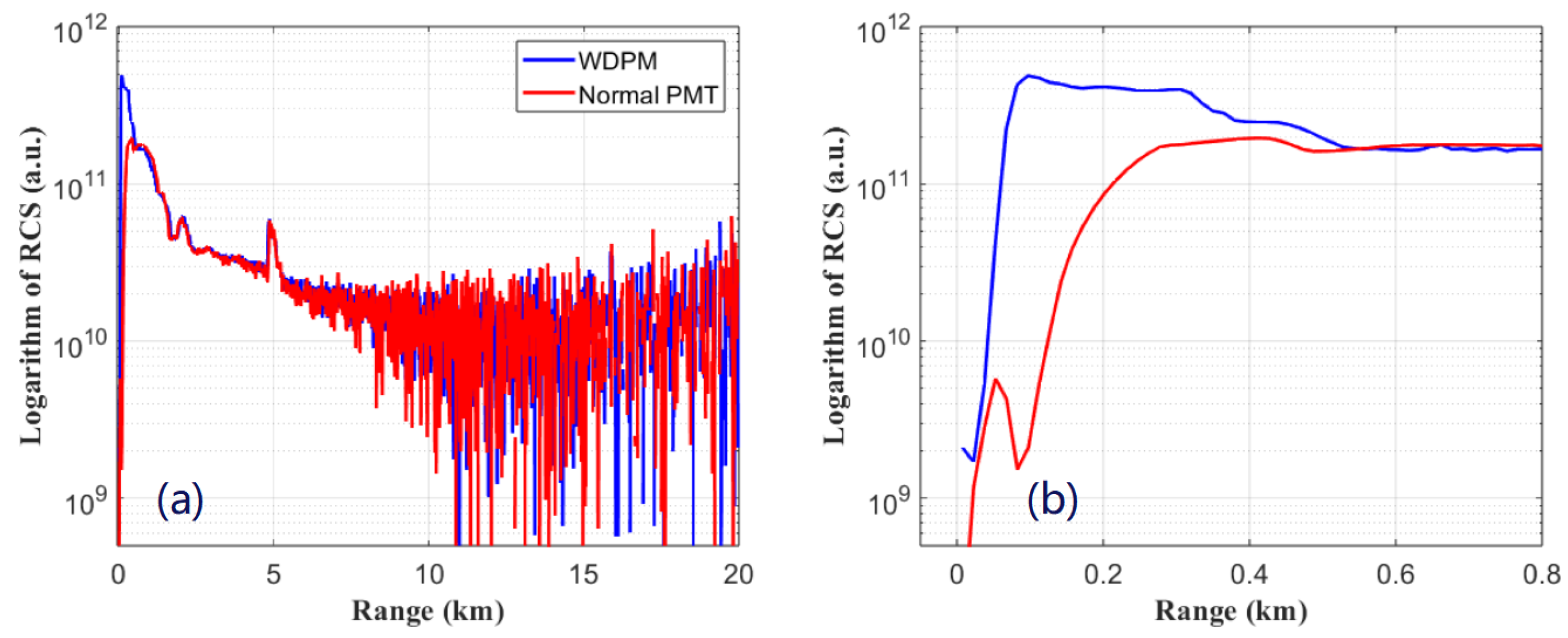
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Müller, D.; Ansmann, A.; Mattis, I.; Tesche, M.; Wandinger, U.; Althausen, D.; Pisani, G. Aerosol-type-dependent lidar ratios observed with Raman lidar. J. Geophys. Res. Atmos. 2007, 112. [Google Scholar] [CrossRef]
- Mona, L.; Amodeo, A.; D’Amico, G.; Giunta, A.; Madonna, F.; Pappalardo, G. Multi-wavelength Raman lidar observations of the Eyjafjallajökull volcanic cloud over Potenza, southern Italy. Atmos. Chem. Phys. 2012, 12, 2229–2244. [Google Scholar] [CrossRef]
- Wang, L.; Stanič, S.; Eichinger, W.; Song, X.; Zavrtanik, M. Development of an automatic polarization Raman LiDAR for aerosol monitoring over complex terrain. Sensors 2019, 19, 3186. [Google Scholar] [CrossRef]
- Qiu, J.; Xia, H.; Shangguan, M.; Dou, X.; Li, M.; Wang, C.; Shang, X.; Lin, S.; Liu, J. Micro-pulse polarization lidar at 1.5 μm using a single superconducting nanowire single-photon detector. Opt. Lett. 2017, 42, 4454–4457. [Google Scholar] [CrossRef]
- Riu, J.; Sicard, M.; Royo, S.; Comerón, A. Silicon photomultiplier detector for atmospheric lidar applications. Opt. Lett. 2012, 37, 1229–1231. [Google Scholar] [CrossRef] [PubMed]
- Mielke, B. How can Licel help the ATMOHEAD community? In EPJ Web of Conferences; EDP Sciences: Les Ulis, France, 2015; Volume 89, p. 04002. [Google Scholar]
- Photonics, H. Handbook Photomultiplier Tubes Basics and Applications. 2020. Available online: https://www.hamamatsu.com/content/dam/hamamatsu-photonics/sites/documents/99_SALES_LIBRARY/etd/PMT_handbook_v4E.pdf (accessed on 5 September 2023).
- Newsom, R.K.; Turner, D.D.; Mielke, B.; Clayton, M.; Ferrare, R.; Sivaraman, C. Simultaneous analog and photon counting detection for Raman lidar. Appl. Opt. 2009, 48, 3903–3914. [Google Scholar] [PubMed]
- Gao, F.; Veberič, D.; Stanič, S.; Bergant, K.; Hua, D.X. Performance improvement of long-range scanning Mie lidar for the retrieval of atmospheric extinction. J. Quant. Spectrosc. Radiat. Transf. 2013, 122, 72–78. [Google Scholar] [CrossRef]
- Feng, C.Z.; Liu, B.Y.; Liu, J.T.; Wu, S.H. Gluing Lidar Signals Detected in Analog-to-Digital and Photon Counting Modes. In EPJ Web of Conferences; EDP Sciences: Les Ulis, France, 2016; Volume 119, p. 25021. [Google Scholar]
- Vinogradov, S.L. Evaluation of performance of silicon photomultipliers in lidar applications. In Proceedings of the Photon Counting Applications 2017, Prague, Czech Republic, 24–25 April 2017; SPIE: New York, NY, USA, 2017; Volume 10229, pp. 92–101. [Google Scholar]
- Bobrovnikov, S.; Gorlov, E.; Zharkov, V.; Zaitsev, N.; Nadeev, A.; Trifonov, D. Evaluation of efficiency of the combined LIDAR signal photodetection technique. In Proceedings of the 26th International Symposium on Atmospheric and Ocean Optics, Atmospheric Physics, Moscow, Russian, 6–10 July 2020; SPIE: New York, NY, USA, 2020; Volume 11560, pp. 659–664. [Google Scholar]
- Zhang, Y.; Yi, F.; Kong, W.; Yi, Y. Slope characterization in combining analog and photon count data from atmospheric lidar measurements. Appl. Opt. 2014, 53, 7312–7320. [Google Scholar] [CrossRef] [PubMed]
- McCartney, E.J. Optics of the Atmosphere: Scattering by Molecules and Particles; John Wiley and Sons, Inc.: New York, NY, USA, 1976. [Google Scholar]
- Lehmann, S.; Wulfmeyer, V.; Bösenberg, J. Time-dependent attenuator for dynamic range reduction of lidar signals. Appl. Opt. 1997, 36, 3469–3474. [Google Scholar] [CrossRef]
- Agishev, R.; Comerón, A.; Bach, J.; Rodriguez, A.; Sicard, M.; Riu, J.; Royo, S. Lidar with SiPM: Some capabilities and limitations in real environment. Opt. Laser Technol. 2013, 49, 86–90. [Google Scholar] [CrossRef]
- Gong, W.; Richter, D.A.; Chyba, T.H.; Temple, D.A. Lidar dynamic range compression by using a membrane mirror light shutter. Opt. Laser Technol. 2007, 39, 909–912. [Google Scholar] [CrossRef]
- Payment, A.; Feygels, V.; Fuchs, E. Proposed lidar receiver architecture for the CZMIL system. In Proceedings of the Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XVI, Orlando, FL, USA, 5–8 April 2010; SPIE: New York, NY, USA, 2010; Volume 7695, pp. 298–306. [Google Scholar]
- Jiang, Y.; Zhao, S.; Jalali, B. Invited Article: Optical dynamic range compression. APL Photonics 2018, 3, 110806. [Google Scholar] [CrossRef]
- Fu, Y.; Wang, Y.; Liu, W.; Zhang, T.; Chen, Z. A Dual-output Photoelectric Detection Module for Simultaneous Analog and Photon Counting Lidar Measurements. In Optical Instrumentation for Energy and Environmental Applications; Optica Publishing Group: Washington, DC, USA, 2014; p. JW6A-8. [Google Scholar]
- Mao, S.; Wang, A.; Yi, Y.; Yin, Z.; Zhao, Y.; Hu, X.; Wang, X. Polarization Raman lidar for atmospheric correction during remote sensing satellite calibration: Instrument and test measurements. Opt. Express 2022, 30, 11986–12007. [Google Scholar] [CrossRef] [PubMed]
- Morille, Y.; Haeffelin, M.; Drobinski, P.; Pelon, J. STRAT: An automated algorithm to retrieve the vertical structure of the atmosphere from single-channel lidar data. J. Atmos. Ocean. Technol. 2007, 24, 761–775. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmitter | |
|---|---|
| Wavelength | 532 nm |
| Frequency | 2500 Hz |
| Energy | 0.45 W |
| Divergence | 0.045 mrad |
| Receiver | |
| Cassegrain telescope | Diameter 150 mm/Focal length 500 mm |
| Pin hole | 0.5 mm |
| Focus lense | Focal length 50 mm |
| Detectors | Hamamatsu PMT H13126-01 or Hamamatsu PMT H7421 |
| Data acquisition | |
| ALA CLASS | 1 × PC |
| Oscilloscope | 2 × Analog Channels |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Yin, Z.; Zhao, B.; Mao, S.; Zhang, Q.; Yi, Y.; Wang, X. Performance of Wide Dynamic Photomultiplier Applied in a Low Blind Zone Lidar. Remote Sens. 2023, 15, 4404. https://doi.org/10.3390/rs15184404
Wang L, Yin Z, Zhao B, Mao S, Zhang Q, Yi Y, Wang X. Performance of Wide Dynamic Photomultiplier Applied in a Low Blind Zone Lidar. Remote Sensing. 2023; 15(18):4404. https://doi.org/10.3390/rs15184404
Chicago/Turabian StyleWang, Longlong, Zhenping Yin, Bing Zhao, Song Mao, Qinlang Zhang, Yang Yi, and Xuan Wang. 2023. "Performance of Wide Dynamic Photomultiplier Applied in a Low Blind Zone Lidar" Remote Sensing 15, no. 18: 4404. https://doi.org/10.3390/rs15184404
APA StyleWang, L., Yin, Z., Zhao, B., Mao, S., Zhang, Q., Yi, Y., & Wang, X. (2023). Performance of Wide Dynamic Photomultiplier Applied in a Low Blind Zone Lidar. Remote Sensing, 15(18), 4404. https://doi.org/10.3390/rs15184404