
Improved Amplitude-Phase Calibration Method of Nonlinear Array for Wide-Beam High-Frequency Surface Wave Radar


Abstract
:
1. Introduction
2. Array Signal Model and Amplitude and Phase Calibration Method
2.1. Array Signal Model
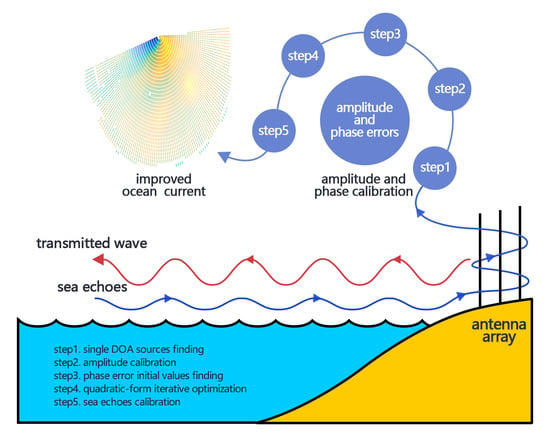
2.2. Amplitude and Phase Calibration Method
3. Simulation
4. Validation
4.1. Equipment and Setup
4.2. Observations and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, C.; Deng, M.; Chen, Z.; Ding, F.; Huang, W. Ocean Wave Parameters and Nondirectional Spectrum Measurements Using Multifrequency HF Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4204413. [Google Scholar] [CrossRef]
- Bourg, N.; Molcard, A. Northern boundary current variability and mesoscale dynamics: A long-term HF RADAR monitoring in the North-Western Mediterranean Sea. Ocean Dyn. 2021, 71, 851–870. [Google Scholar] [CrossRef]
- Lai, Y.; Zhou, H.; Wen, B. Surface Current Characteristics in the Taiwan Strait Observed by High-Frequency Radars. IEEE J. Ocean. Eng. 2016, 42, 449–457. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; He, C.; Xie, F.; Chen, X. A Hybrid Beam-Forming and Direction-Finding Method for Wind Direction Sensing Based on HF Radar. IEEE Trans. Geosci. Remote. Sens. 2018, 56, 6622–6629. [Google Scholar] [CrossRef]
- Crombie, D.D. Doppler Spectrum of Sea Echo at 13.56 Mc./s. Nature 1955, 175, 681–682. [Google Scholar] [CrossRef]
- Li, M.; Zhang, L.; Wu, X.; Yue, X.; Emery, W.J.; Yi, X.; Liu, J.; Yang, G. Ocean Surface Current Extraction Scheme With High-Frequency Distributed Hybrid Sky-Surface Wave Radar System. IEEE Trans. Geosci. Remote. Sens. 2018, 56, 4678–4690. [Google Scholar] [CrossRef]
- Lai, Y.; Zhou, H.; Zeng, Y.; Wen, B. Accuracy Assessment of Surface Current Velocities Observed by OSMAR-S High-Frequency Radar System. IEEE J. Ocean. Eng. 2017, 43, 1068–1074. [Google Scholar] [CrossRef]
- Zhang, Z.; Wen, F.; Shi, J.; He, J.; Truong, T.K. 2D-DOA Estimation for Coherent Signals via a Polarized Uniform Rectangular Array. IEEE Signal Process. Lett. 2023, 30, 893–897. [Google Scholar] [CrossRef]
- Yang, S.; Ke, H.; Wu, X.; Tian, J.; Hou, J. HF radar ocean current algorithm based on MUSIC and the validation experiments. IEEE J. Ocean. Eng. 2006, 30, 601–618. [Google Scholar] [CrossRef]
- Wang, X.; Guo, Y.; Wen, F.; He, J.; Truong, T.K. EMVS-MIMO Radar with Sparse Rx Geometry: Tensor Modeling and 2D Direction Finding. IEEE Trans. Aerosp. Electron. Syst. 2023. Early Access. [Google Scholar] [CrossRef]
- Barrick, D.E.; Lipa, B.J. Correcting for distorted antenna patterns in CODAR ocean surface measurements. IEEE J. Ocean. Eng. 1986, 11, 304–309. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, L.; Zhao, C.; Li, J. Calibration and Evaluation of a Circular Antenna Array for HF Radar Based on AIS Information. IEEE Geosci. Remote. Sens. Lett. 2019, 17, 988–992. [Google Scholar] [CrossRef]
- Paduan, J.D.; Kim, K.C.; Cook, M.S.; Chavez, F.P. Calibration and Validation of Direction-Finding High-Frequency Radar Ocean Surface Current Observations. IEEE J. Ocean. Eng. 2007, 31, 862–875. [Google Scholar] [CrossRef]
- Friedlander, B.; Weiss, A.J. Direction Finding in the Presence of Mutual Coupling. IEEE Trans. Antennas Propag. 1991, 39, 273–284. [Google Scholar] [CrossRef]
- Friedlander, B.; Weiss, A.J. Performance of direction-finding systems with sensor gain and phase uncertainties. Circuits Syst. Signal Process. 1993, 12, 3–35. [Google Scholar] [CrossRef]
- Solomon, I.S.D.; Gray, D.A.; Abramovich, Y.I.; Anderson, S.J. Over-the-horizon radar array calibration using echoes from ionised meteor trails. Radar Signal Process. IEE Proc. F 1998, 145, 173–180. [Google Scholar] [CrossRef]
- Xiongbin, W.; Feng, C.; Zijie, Y.; Hengyu, K. Broad Beam HFSWR Array Calibration Using Sea Echoes. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006. [Google Scholar]
- Barrick, D.; Snider, J. The statistics of HF sea-echo Doppler spectra. IEEE Trans. Antennas Propag. 1977, 25, 19–28. [Google Scholar] [CrossRef]
- Rockah, Y.; Messer, H.; Schultheiss, P.M. Localization performance of arrays subject to phase errors. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 402–410. [Google Scholar] [CrossRef]
- Chen, Z.; Zeng, G.; Zhao, C.; Zhang, L. A Phase Error Estimation Method for Broad Beam High-Frequency Radar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1526–1530. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Zeng, G.; Zhang, L. Evaluating Two Array Autocalibration Methods with Multifrequency HF Radar Current Measurements. J. Atmos. Ocean. Technol. 2015, 32, 1088–1097. [Google Scholar] [CrossRef]
- Schmidt, R.; Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Wen, F.; Shi, J.; He, J.; Truong, T.K. 2D-DOD and 2D-DOA Estimation Using Sparse L-Shaped EMVS-MIMO Radar. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 2077–2084. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Operating frequency | 8 MHz |
| Sweep bandwidth | 30 kHz |
| Sweep period | 0.6528 s |
| Arrary normal (based on due north clockwise) | 170° |
| Range resolution | 5 km |
| Angular resolution | 1.5° |
| Detection range | 250 km |
| Time resolution for current measurement | 10 min |
| Uncalibrated | Calibrated | |
|---|---|---|
| MD (m/s) | 0.17 | 0.05 |
| RMSE (m/s) | 0.21 | 0.06 |
| CC | −0.36 | 0.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, W.; Liu, H.; Chen, Z.; Yang, S.; Hu, Y.; Wen, F. Improved Amplitude-Phase Calibration Method of Nonlinear Array for Wide-Beam High-Frequency Surface Wave Radar. Remote Sens. 2023, 15, 4405. https://doi.org/10.3390/rs15184405
Fu W, Liu H, Chen Z, Yang S, Hu Y, Wen F. Improved Amplitude-Phase Calibration Method of Nonlinear Array for Wide-Beam High-Frequency Surface Wave Radar. Remote Sensing. 2023; 15(18):4405. https://doi.org/10.3390/rs15184405
Chicago/Turabian StyleFu, Wei, Han Liu, Zhihui Chen, Shu Yang, Yuandong Hu, and Fangqing Wen. 2023. "Improved Amplitude-Phase Calibration Method of Nonlinear Array for Wide-Beam High-Frequency Surface Wave Radar" Remote Sensing 15, no. 18: 4405. https://doi.org/10.3390/rs15184405
APA StyleFu, W., Liu, H., Chen, Z., Yang, S., Hu, Y., & Wen, F. (2023). Improved Amplitude-Phase Calibration Method of Nonlinear Array for Wide-Beam High-Frequency Surface Wave Radar. Remote Sensing, 15(18), 4405. https://doi.org/10.3390/rs15184405