

Design of a Data Acquisition, Correction and Retrieval of Na Doppler Lidar for Diurnal Measurement of Temperature and Wind in the Mesosphere and Lower Thermosphere Region


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
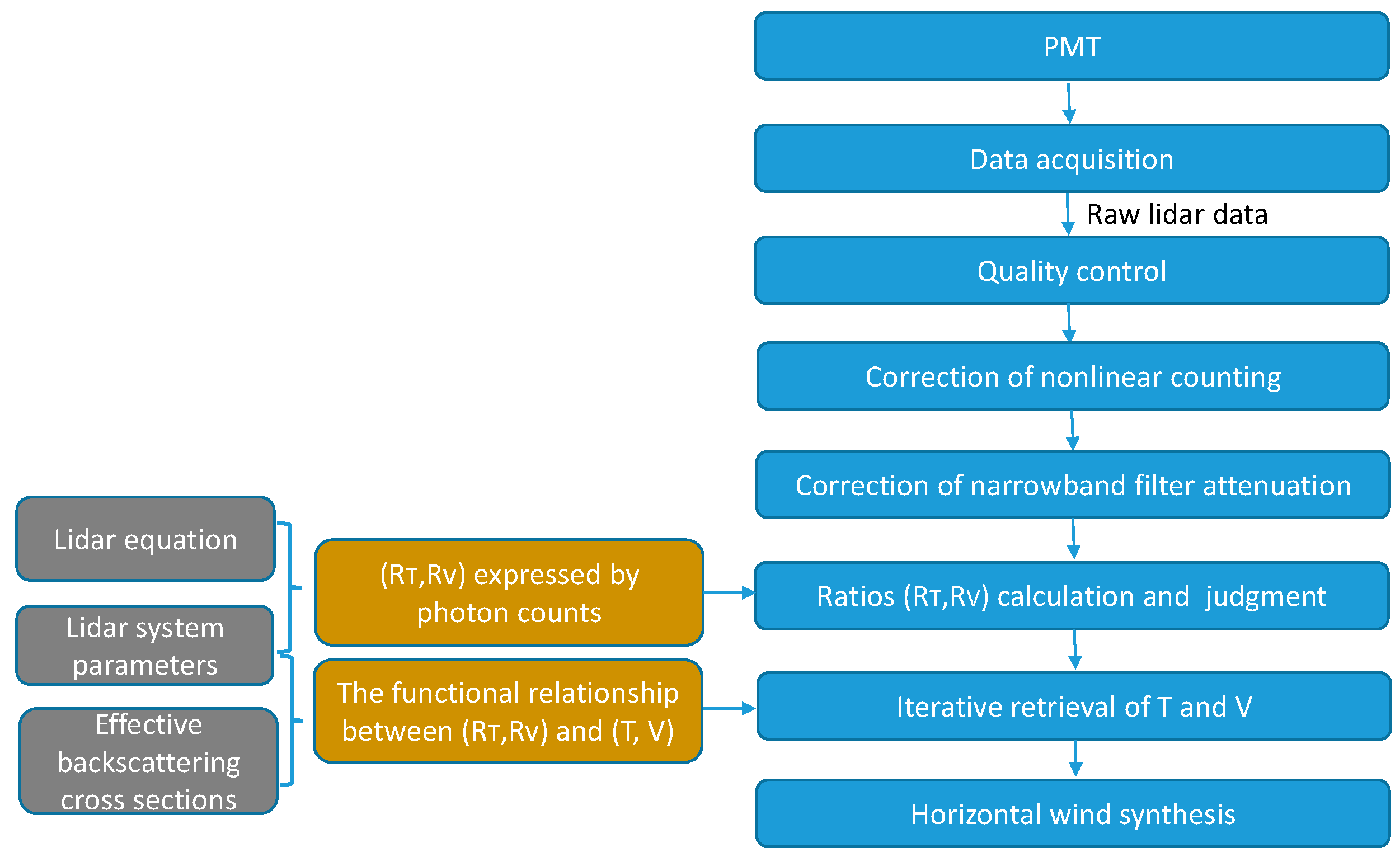
2. Methodology
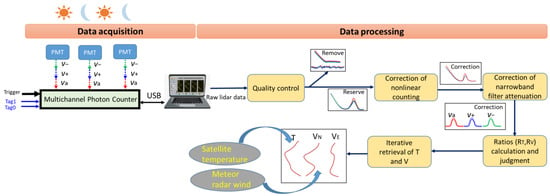
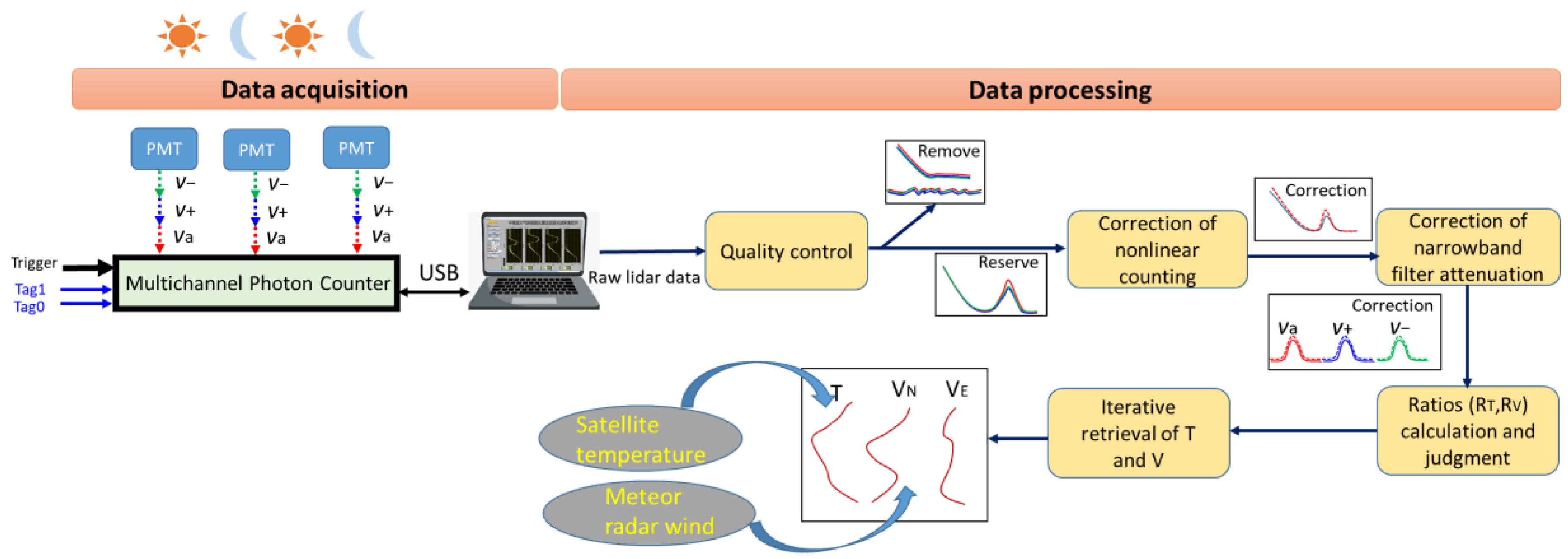
3. Data Acquisition and Processing
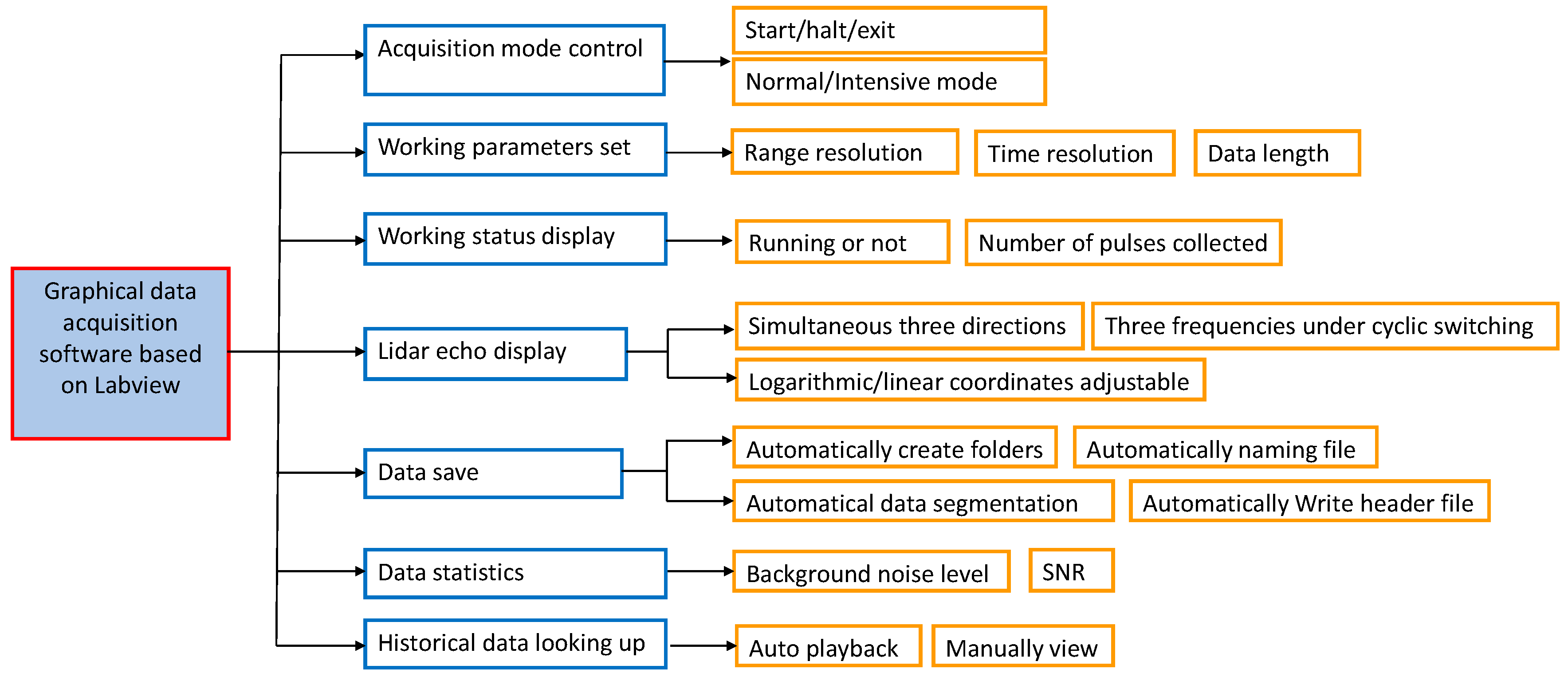
3.1. Data Acquisition of Three Frequencies in Three Directions
3.2. Data Processing
3.2.1. Quality Control of Raw Lidar Data
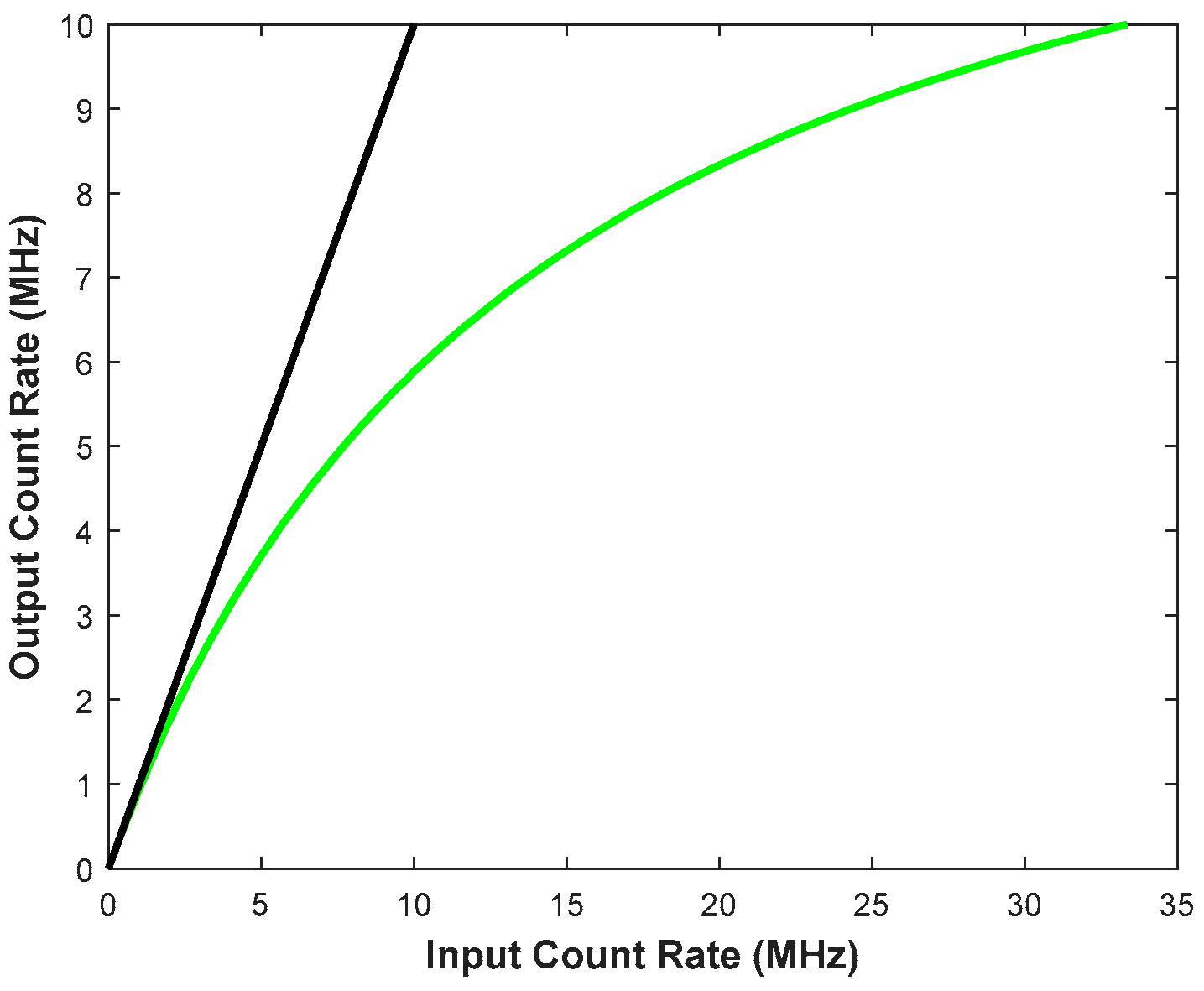
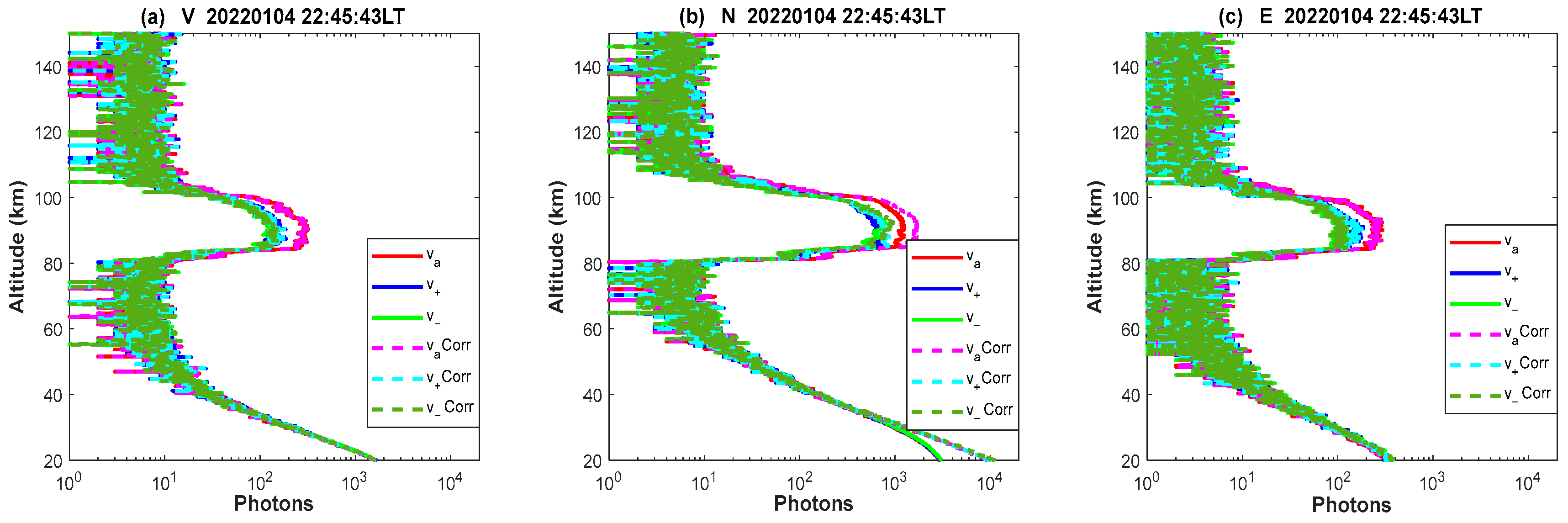
3.2.2. Correction of PMT Nonlinear Counting
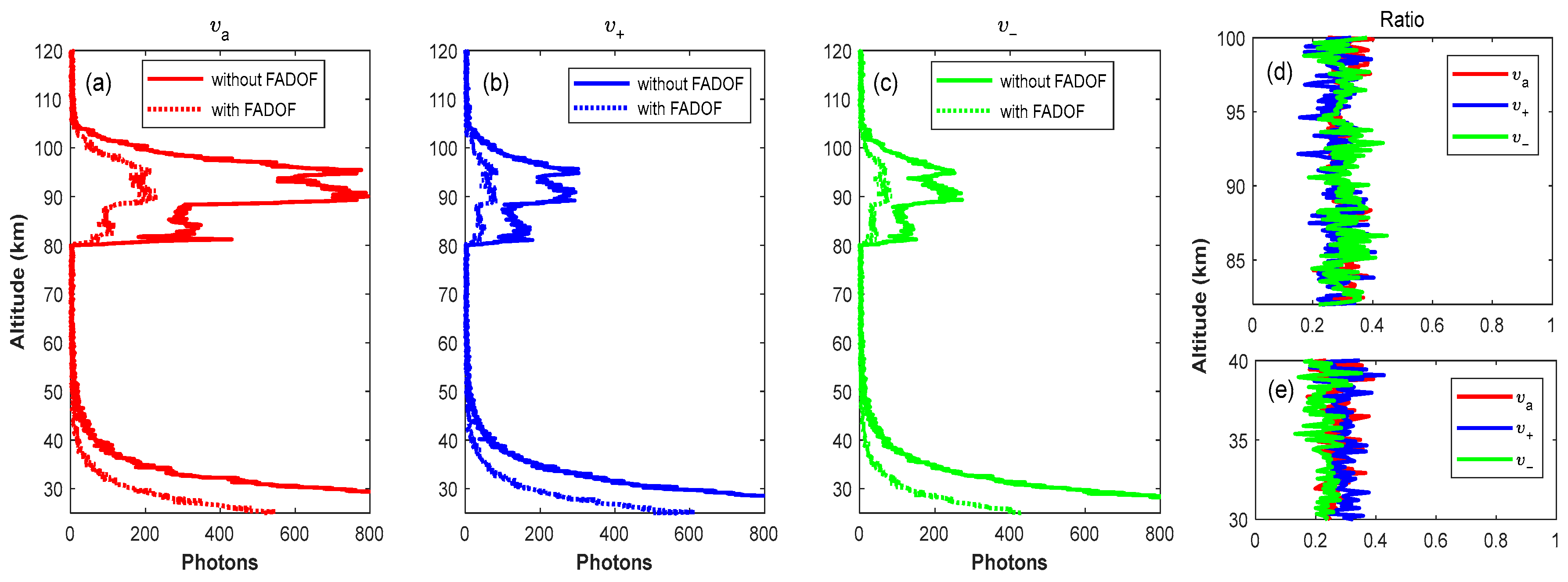
3.2.3. Correction of Narrowband Filter
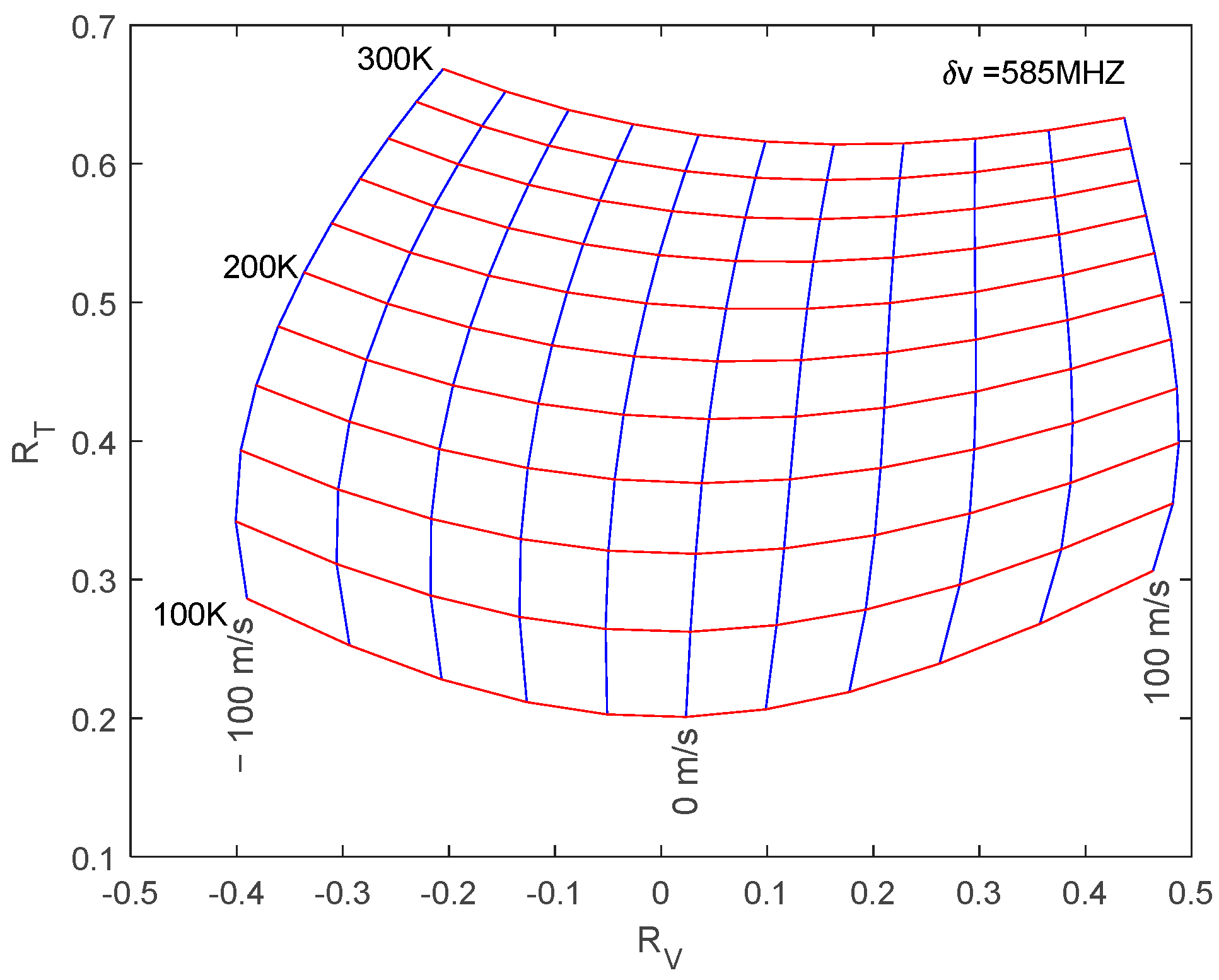
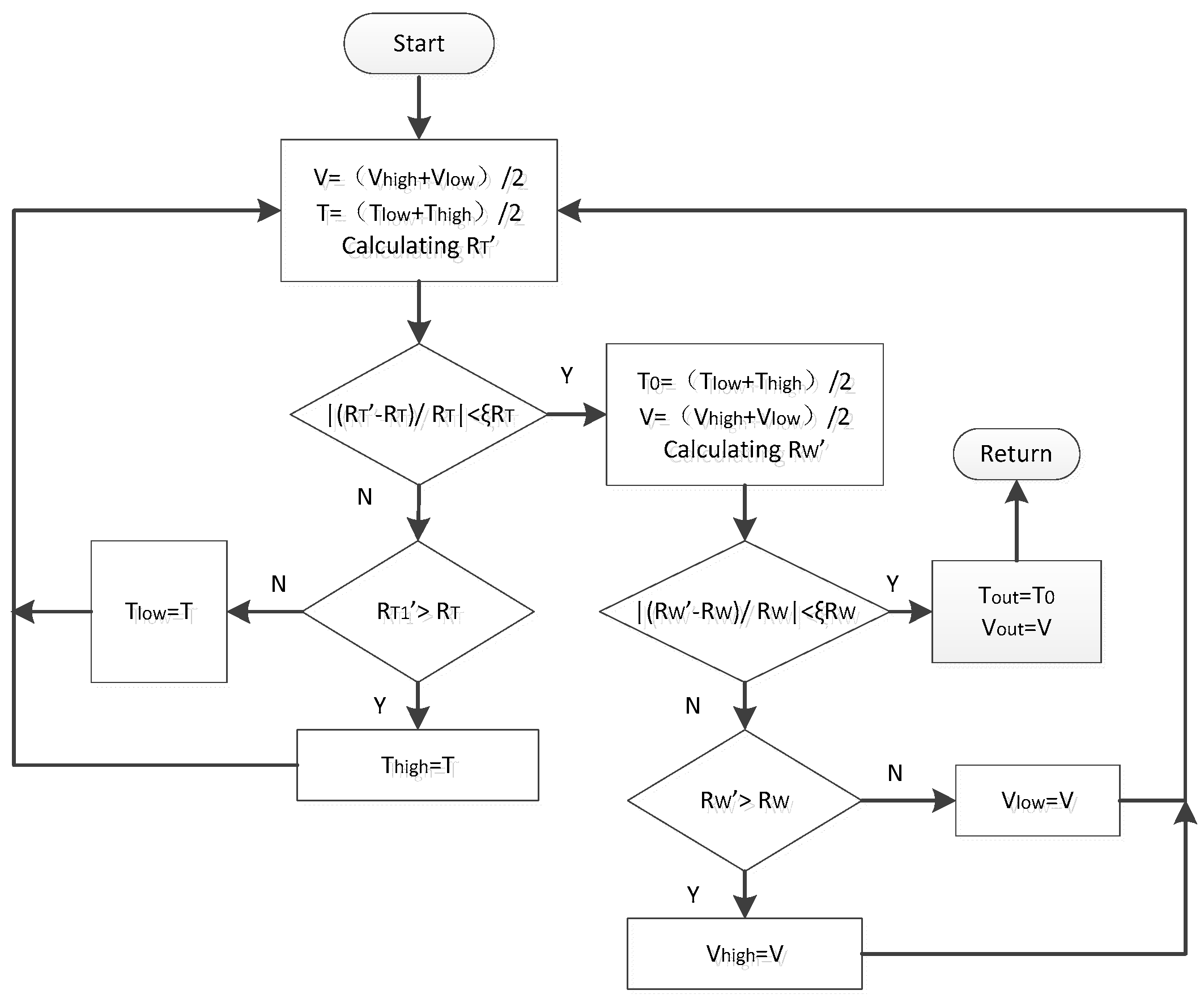
3.2.4. Iterative Retrieval of Temperature and LOS Wind
- Setting the retrieval range of temperature and wind. We initially set the wind speed range to −150 m/s to 150 m/s and the temperature range to 100 K to 300 K, using the initial values Tlow = 100 K, Thigh = 300 K, Vlow = −150 m/s and Vhigh = 150 m/s;
- Using the bisection method, we decrease the range to half the previous value, refining the approximate values of temperature and wind speed until they meet the preset accuracy of ξRT and ξRW (usually set to 0.005%).
3.2.5. Synthesis of Horizontal Wind
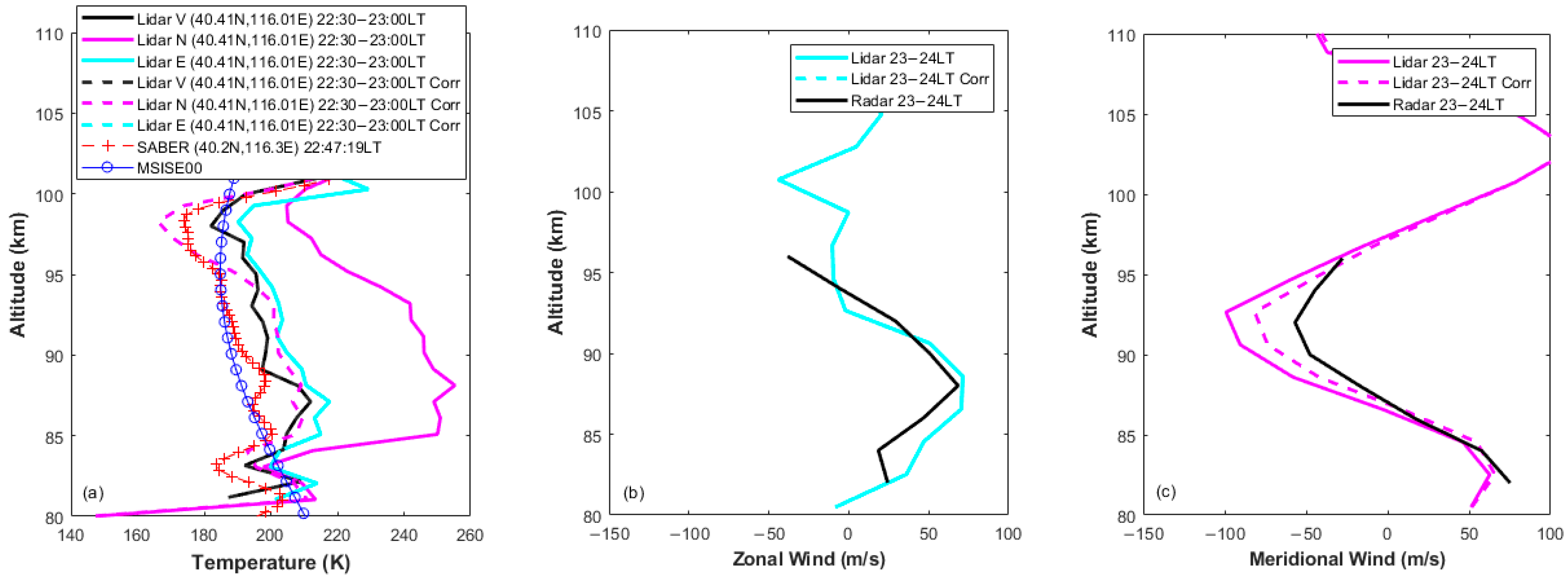
4. Observational Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, B.; Xue, X.; Lu, G.; Kuo, C.; Dou, X.; Gao, Q.; Qie, X.; Wu, J.; Qiu, S.; Chi, Y.; et al. The enhancement of neutral metal Na layer above thunderstorms. Geophys. Res. Lett. 2017, 44, 9555–9563. [Google Scholar] [CrossRef]
- Qiu, S.; Wang, N.; Soon, W.; Lu, G.; Jia, M.; Wang, X.; Xue, X.; Li, T.; Dou, X. The sporadic sodium layer: A possible tracer for the conjunction between the upper and lower atmospheres. Atmos. Chem. Phys. 2021, 21, 11927–11940. [Google Scholar] [CrossRef]
- Gardner, C.S.; Kane, T.J.; Senft, D.C.; Qian, J.; Papen, G.C. Simultaneous observations of sporadic E, Na, Fe, and Caþ layers at Urbana, Illinois: Three case studies. J. Geophys. Res. 1993, 98, 16865–16873. [Google Scholar] [CrossRef]
- Gardner, J.A.; Viereck, R.A.; Murad, E.; Knecht, D.J.; Pike, C.P.; Broadfoot, A.L.; Anderson, E.R. Simultaneous observations of neutral and ionic magnesium in the thermosphere. Geophys. Res. Lett. 1995, 22, 2119–2122. [Google Scholar] [CrossRef]
- She, C.Y.; Yu, J.R. Simultaneous three-frequency Na lidar measurements of radial wind and temperature in the mesopause region. Geophys. Res. Lett. 1994, 21, 1771–1774. [Google Scholar] [CrossRef]
- Alpers, M.; Hoffner, J.; von Zahn, U. Iron atom densities in the polar mesosphere from lidar observations. Geophys. Res. Lett. 1990, 17, 2345–2348. [Google Scholar] [CrossRef]
- Alpers, M.; Höfffner, J.; von Zahn, U. Upper Atmosphere Ca and Ca+ at Mid-Latitudes: First Simultaneous and Common-Volume Lidar Observations. Geophys. Res. Lett. 1996, 23, 567–570. [Google Scholar] [CrossRef]
- Eska, V.; Hoffner, J.; von Zahn, U. Upper atmosphere potassium layer and its seasonal variations at 54°N. J. Geophys. Res. Space Phys. 1998, 103, 29207–29214. [Google Scholar] [CrossRef]
- Chu, X.Z.; Papen, G. Laser Remote Sensing: Resonance fluorescence lidar for measurements of the middle and upper atmosphere. In Book Laser Remote Sensing; Fujii, T., Fukuchi, T., Eds.; CRC Press: London, UK, 2005. [Google Scholar]
- Yi, F.; Zhang, S.; Yu, C.; Zhang, Y.; He, Y.; Liu, F.; Huang, K.; Huang, C.; Tan, Y. Simultaneous and common-volume three-lidar observations of sporadic metal layers in the mesopause region. J. Atmos. Sol. Terr. Phys. 2013, 102, 172–184. [Google Scholar] [CrossRef]
- Collins, R.L.; Li, J.; Martus, C.M. First lidar observation of the mesospheric Ni layer. Geophys. Res. Lett. 2015, 42, 665–671. [Google Scholar] [CrossRef]
- Dou, X.K.; Qiu, S.C.; Xue, X.H.; Chen, T.D.; Ning, B.Q. Sporadic and thermospheric enhanced sodium layers observed by a lidar chain over China. J. Geophys. Res. 2013, 118, 6627–6643. [Google Scholar] [CrossRef]
- Hu, X.; Yan, Z.A.; Guo, S.Y.; Cheng, Y.Q.; Gong, J.C. Sodium fluorescence Doppler lidar to measure atmospheric temperature in the mesopause region. Chin. Sci. Bull. 2011, 56, 417–423. [Google Scholar] [CrossRef]
- Li, T.; Fang, X.; Liu, W.; Gu, S.; Dou, X. Narrowband sodium lidar for the measurements of mesopause region temperature and wind. Appl. Opt. 2012, 51, 5401–5411. [Google Scholar] [CrossRef]
- Xia, Y.; Du, L.; Cheng, X.; Li, F.; Wang, J.; Wang, Z.; Yang, Y.; Lin, X.; Xun, Y.; Gong, S.; et al. Development of a solid-state sodium Doppler lidar using an all-fiber-coupled injection seeding unit for simultaneous temperature and wind measurements in the mesopause region. Opt. Express 2017, 25, 5264–5278. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Yang, Y.; Xia, Y.; Lin, X.; Zhang, L.; Jiang, H.; Cheng, X.; Liu, L.; Ji, K.; Li, F. Solid-state 589 nm seed laser based on Raman fiber amplifier for sodium wind/temperature lidar in Tibet, China. Opt. Express 2018, 26, 16226–16235. [Google Scholar] [CrossRef] [PubMed]
- Jiao, J.; Yang, G.; Wang, J.; Cheng, X.; Li, F.; Yang, Y.; Gong, W.; Wang, Z.; Du, L.; Yan, C.; et al. First report of sporadic K layers and comparison with sporadic Na layers at Beijing, China (40.6°N, 116.2°E). J. Geophys. Res. 2015, 120, 5214–5225. [Google Scholar] [CrossRef]
- Wu, F.; Zheng, H.; Cheng, X.; Yang, Y.; Li, F.; Gong, S.; Du, L.; Wang, J.; Yang, G. Simultaneous detection of the Ca and Ca+ layers by a dual-wavelength tunable lidar system. Appl. Opt. 2020, 59, 4122–4130. [Google Scholar] [CrossRef]
- Wu, F.; Zheng, H.; Yang, Y.; Cheng, X.; Li, F.; Du, L.; Wang, J.; Jiao, J.; Plane, J.; Feng, W.; et al. Lidar observations of the upper atmospheric Ni layer at Beijing (40°N, 116°E). J. Quant. Spec. Rad. Trans. 2021, 260, 10748. [Google Scholar] [CrossRef]
- Wang, C.; Chen, Z.; Xu, J. Introduction to Chinese Meridian Project—Phase II. Chin. J. Space Sci. 2020, 40, 718–722. [Google Scholar] [CrossRef]
- Kawahara, T.; Nozawa, S.; Saito, N.; Kawabata, T.; Tsuda, T.; Wada, S. Sodium temperature/wind lidar based on laser-diode-pumped Nd:YAG lasers deployed at Tromsø, Norway (69.6°N, 19.2°E). Opt. Express 2017, 25, 283807. [Google Scholar] [CrossRef]
- Krueger, D.A.; She, C.-Y.; Yuan, T. Retrieving mesopause temperature and line-of-sight wind from full-diurnal-cycle Na lidar observations. Appl. Opt. 2015, 54, 9469–9489. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; White, M.A.; Krueger, D.A.; She, C.Y. Daytime mesopause temperature measurements with a sodium-vapor dispersive Faraday filter in a lidar receiver. Opt. Lett. 1996, 21, 1003–1005. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Cheng, X.W.; Li, F.Q.; Hu, X.; Lin, X.; Gong, S.S. A flat spectral Faraday filter for sodium lidar. Opt. Lett. 2011, 36, 1302–1304. [Google Scholar] [CrossRef] [PubMed]
- Gardner, C.S.; Vargas, F.A. Optimizing three-frequency Na, Fe, and He lidars for measurements of wind, temperature, and species density and the vertical fluxes of heat and constituents. Appl. Opt. 2014, 53, 4100–4116. [Google Scholar] [CrossRef]
- Bills, R.E.; Gardner, C.S.; She, C. Narrowband lidar technique for sodium temperature and Doppler wind observations of the upper atmosphere. Opt. Eng. 1991, 30, 13–21. [Google Scholar] [CrossRef]
- Liu, A.; Guo, Y. Photomultiplier tube calibration based on Na lidar observation and its effect on heat flux bias. Appl. Opt. 2016, 55, 9467–9475. [Google Scholar] [CrossRef]
- Russell III, J.M.; Mlynczak, M.G.; Gordley, L.L.; Tansock, J.J.; Esplin, R. Overview of the SABER experiment and preliminary calibration results. In Proceedings of the SPIE, Optical Spectroscopic Techniques and Instrumentation for Atmospheric and Space Research III, Denver, CO, USA, 20 October 1999; Volume 3756, pp. 277–288. [Google Scholar]
- Dawkins, E.C.M.; Feofilov, A.; Rezac, L.; Kutepov, A.A.; Janches, D.; Höffner, J.; Chu, X.; Lu, X.; Mlynczak, M.G.; Russell, J., III. Validation of SABER v2.0 operational temperature data with ground-based lidars in the mesosphere-lower thermosphere region (75–105 km). J. Geophys. Res. Atmos. 2018, 123, 9916–9934. [Google Scholar] [CrossRef]
- Kutepov, A.A.; Feofilov, A.G.; Marshall, B.T.; Gordley, L.L.; Pesnell, W.D.; Goldberg, R.A.; Russell, J.M., III. SABER temperature observations in the summer polar mesosphere and lower thermosphere: Importance of accounting for the CO2v2 quanta V–V exchange. Geophys. Res. Lett. 2006, 33, L21809–L21813. [Google Scholar] [CrossRef]
- Feofilov, A.G.; Kutepov, A.A.; She, C.Y.; Smith, A.K.; Pesnell, W.D.; Goldberg, R.A. CO2(v2)-O quenching rate coefficient derived from coincidental SABER/TIMED and Fort Collins lidar observations of the mesosphere and lower thermosphere. Atmos. Chem. Phys. 2012, 12, 9013–9023. [Google Scholar] [CrossRef]
- Xia, Y.; Cheng, X.; Li, F.; Yang, Y.; Lin, X.; Jiao, J.; Du, L.; Wang, J.; Yang, G. Sodium lidar observation over full diurnal cycles in Beijing, China. Appl. Opt. 2020, 59, 1529–1536. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, Y.; Cheng, X.; Wang, Z.; Liu, L.; Yang, Y.; Du, L.; Jiao, J.; Wang, J.; Zheng, H.; Li, Y.; et al. Design of a Data Acquisition, Correction and Retrieval of Na Doppler Lidar for Diurnal Measurement of Temperature and Wind in the Mesosphere and Lower Thermosphere Region. Remote Sens. 2023, 15, 5140. https://doi.org/10.3390/rs15215140
Xia Y, Cheng X, Wang Z, Liu L, Yang Y, Du L, Jiao J, Wang J, Zheng H, Li Y, et al. Design of a Data Acquisition, Correction and Retrieval of Na Doppler Lidar for Diurnal Measurement of Temperature and Wind in the Mesosphere and Lower Thermosphere Region. Remote Sensing. 2023; 15(21):5140. https://doi.org/10.3390/rs15215140
Chicago/Turabian StyleXia, Yuan, Xuewu Cheng, Zelong Wang, Linmei Liu, Yong Yang, Lifang Du, Jing Jiao, Jihong Wang, Haoran Zheng, Yajuan Li, and et al. 2023. "Design of a Data Acquisition, Correction and Retrieval of Na Doppler Lidar for Diurnal Measurement of Temperature and Wind in the Mesosphere and Lower Thermosphere Region" Remote Sensing 15, no. 21: 5140. https://doi.org/10.3390/rs15215140
APA StyleXia, Y., Cheng, X., Wang, Z., Liu, L., Yang, Y., Du, L., Jiao, J., Wang, J., Zheng, H., Li, Y., Li, F., & Yang, G. (2023). Design of a Data Acquisition, Correction and Retrieval of Na Doppler Lidar for Diurnal Measurement of Temperature and Wind in the Mesosphere and Lower Thermosphere Region. Remote Sensing, 15(21), 5140. https://doi.org/10.3390/rs15215140