
Transformer in UAV Image-Based Weed Mapping


Abstract
:1. Introduction
2. Materials and Methods
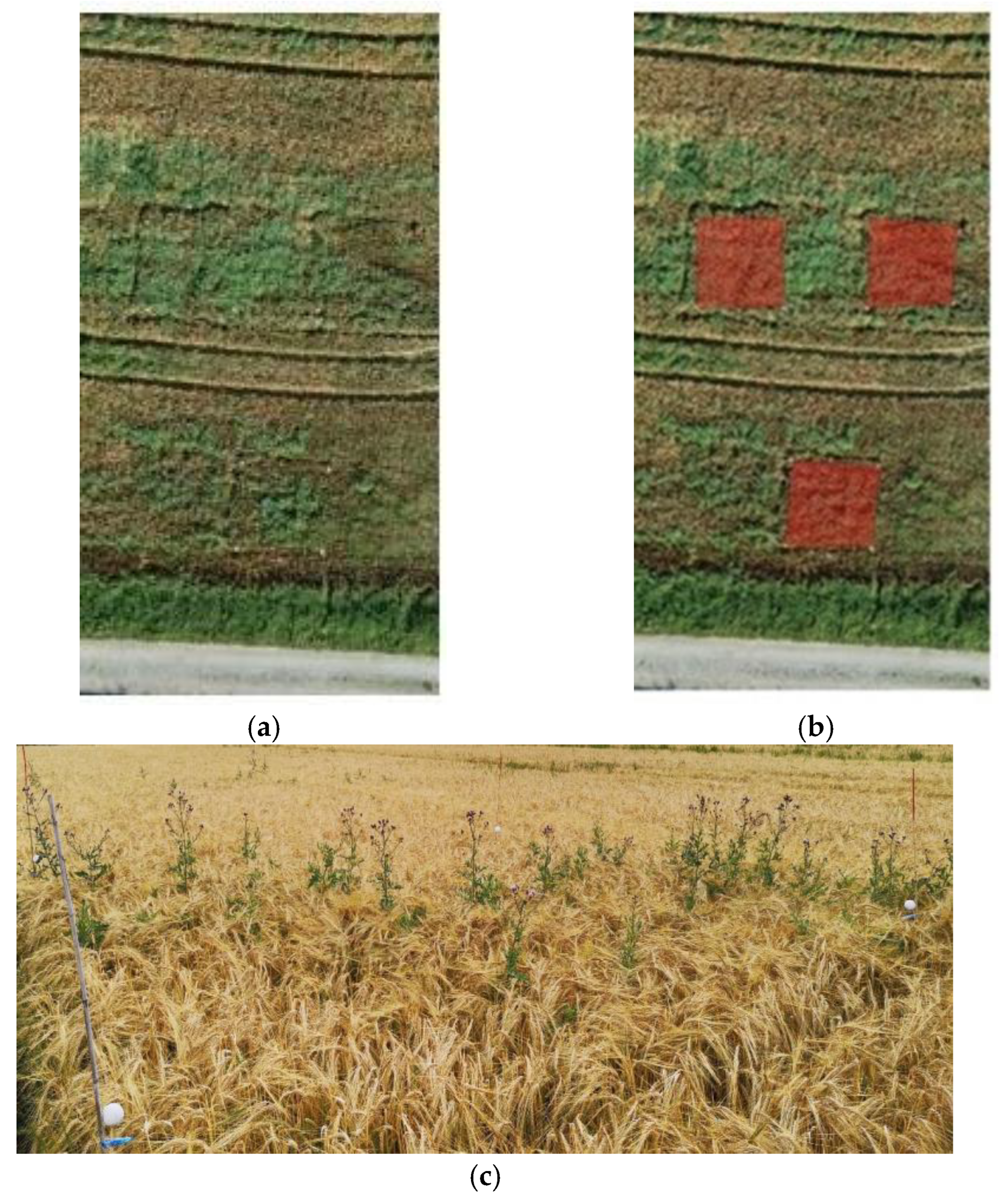
2.1. Study Site and Ground Reference Data
2.2. UAV Imaging and Preprocessing
2.3. Pixel Annotation for Model Development
2.4. Classification Models
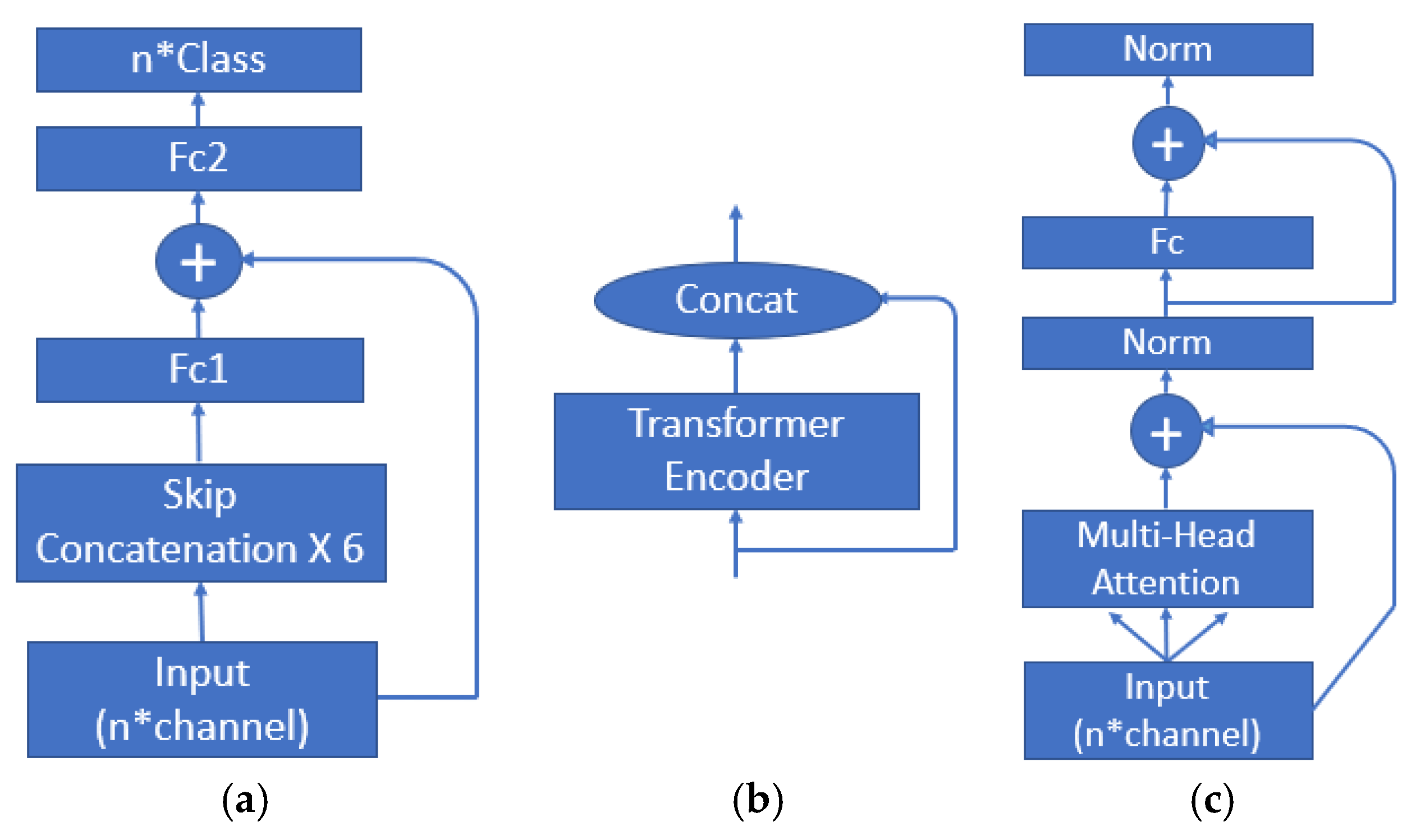
2.4.1. Transformer
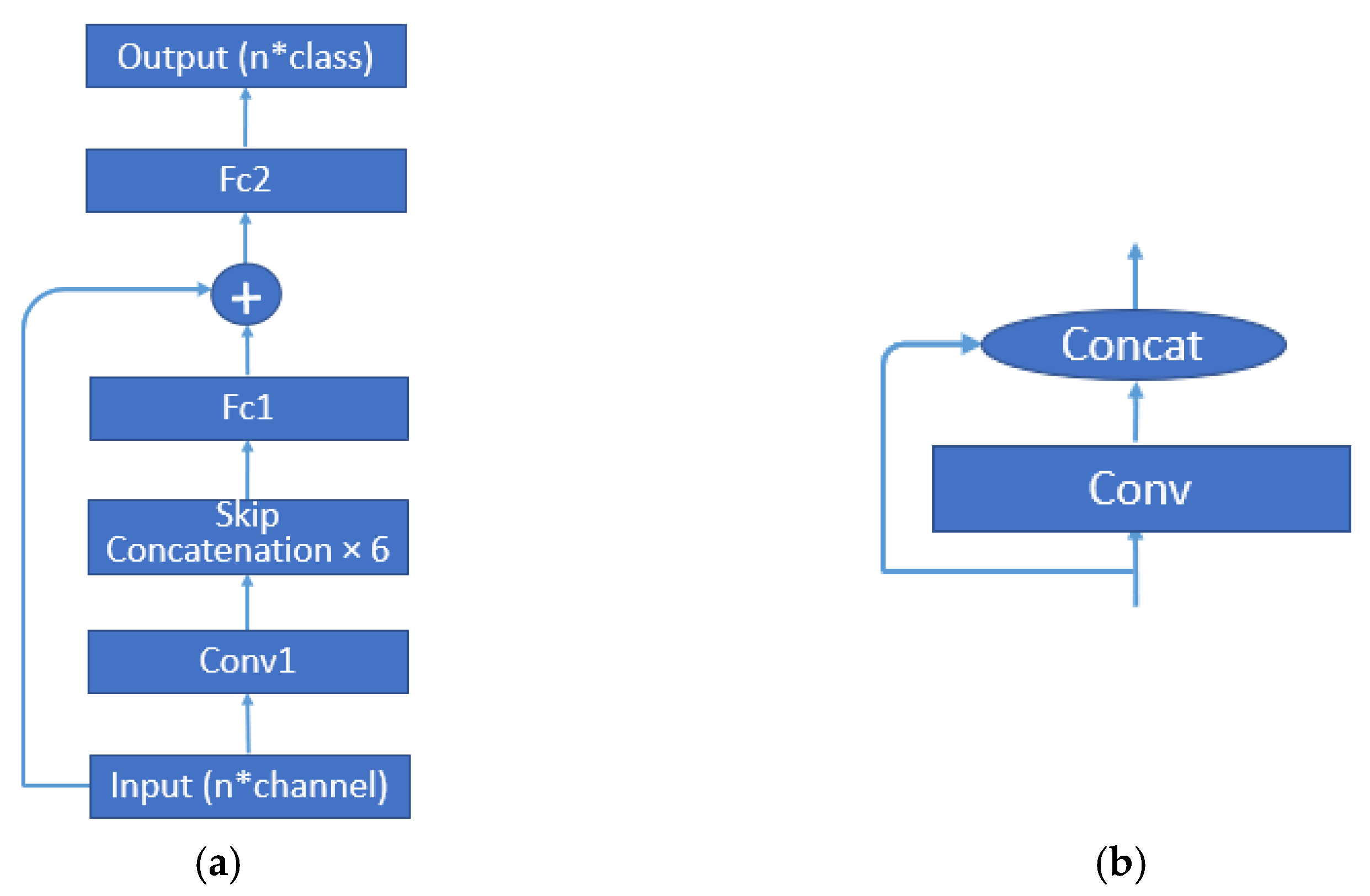
2.4.2. CNN
2.4.3. RF and KNN
2.5. Evaluation Metrics
2.6. Implementation
3. Results
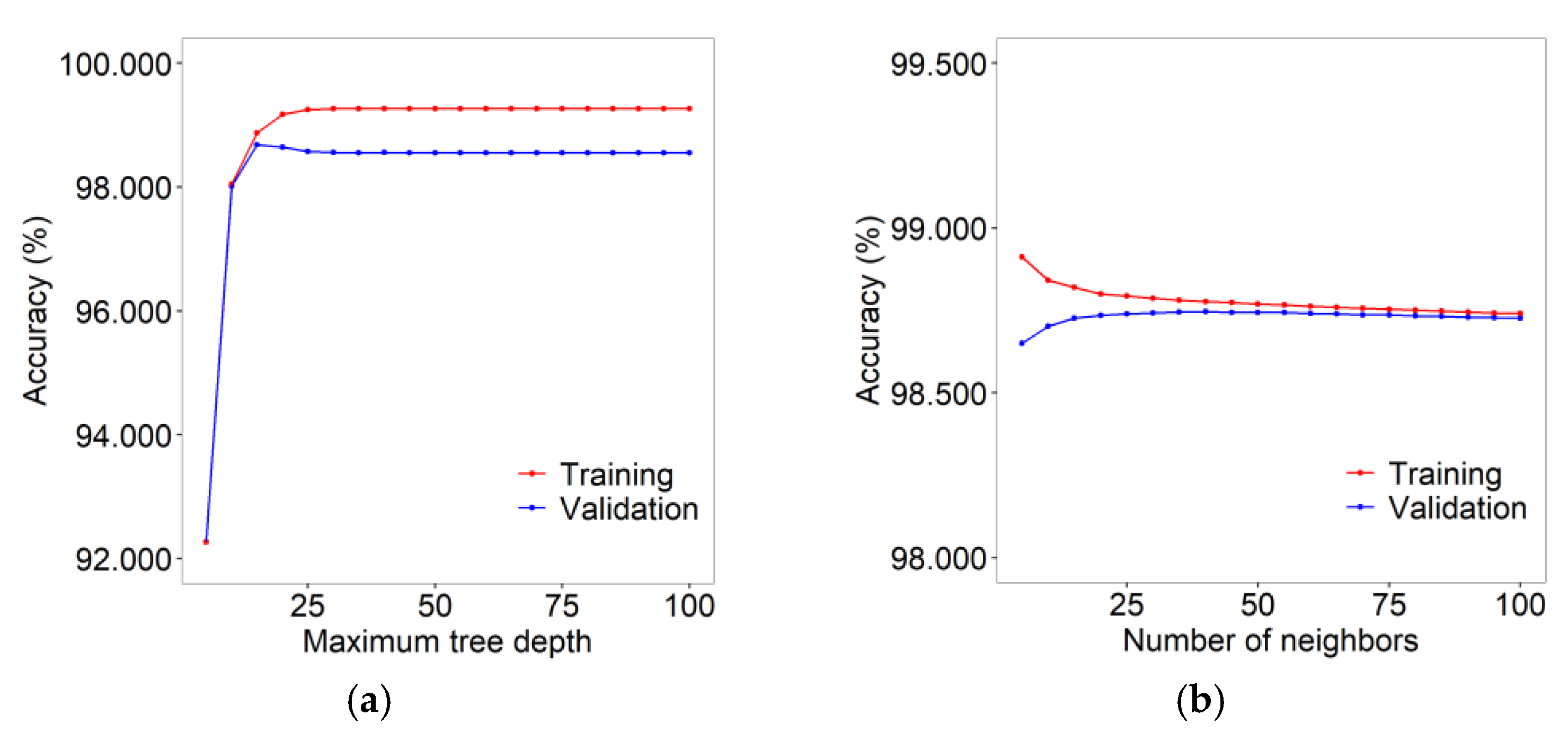
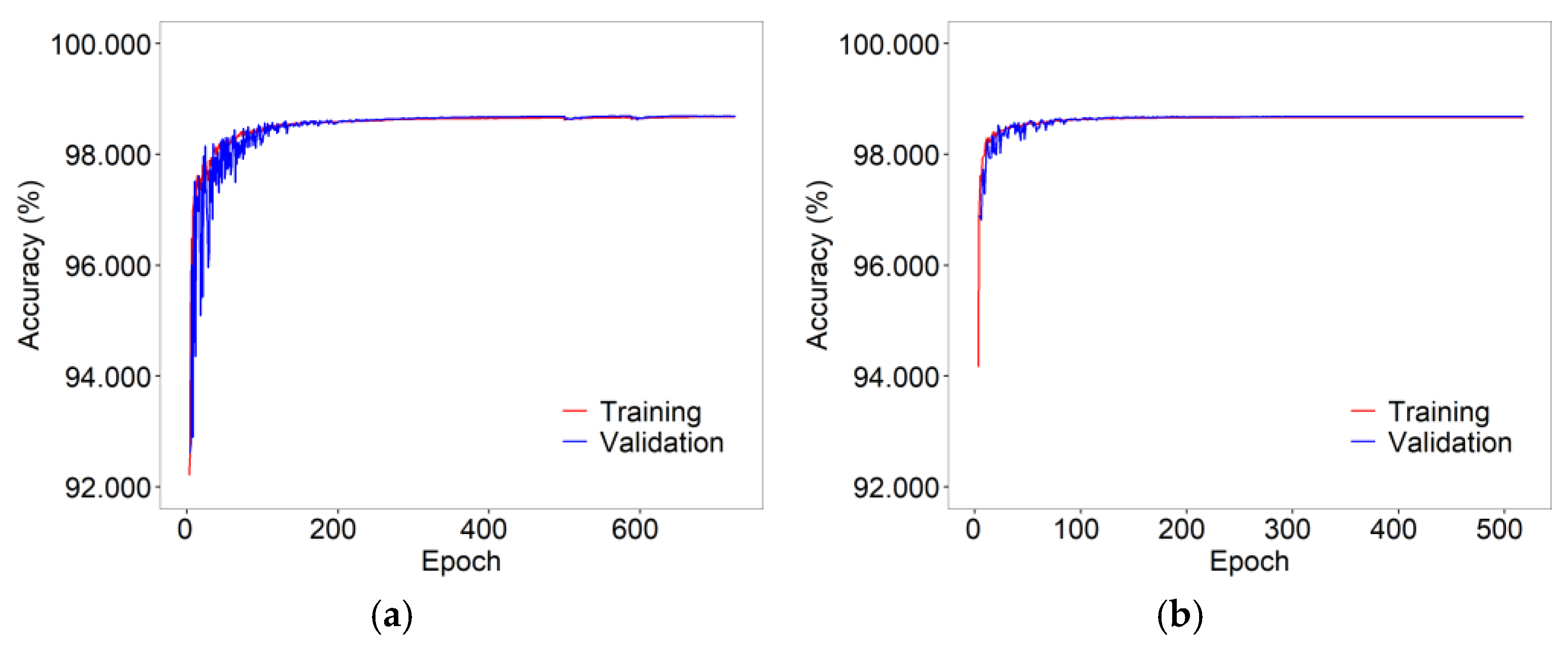
3.1. Model Development
3.2. Ablation Study on Transformer Model
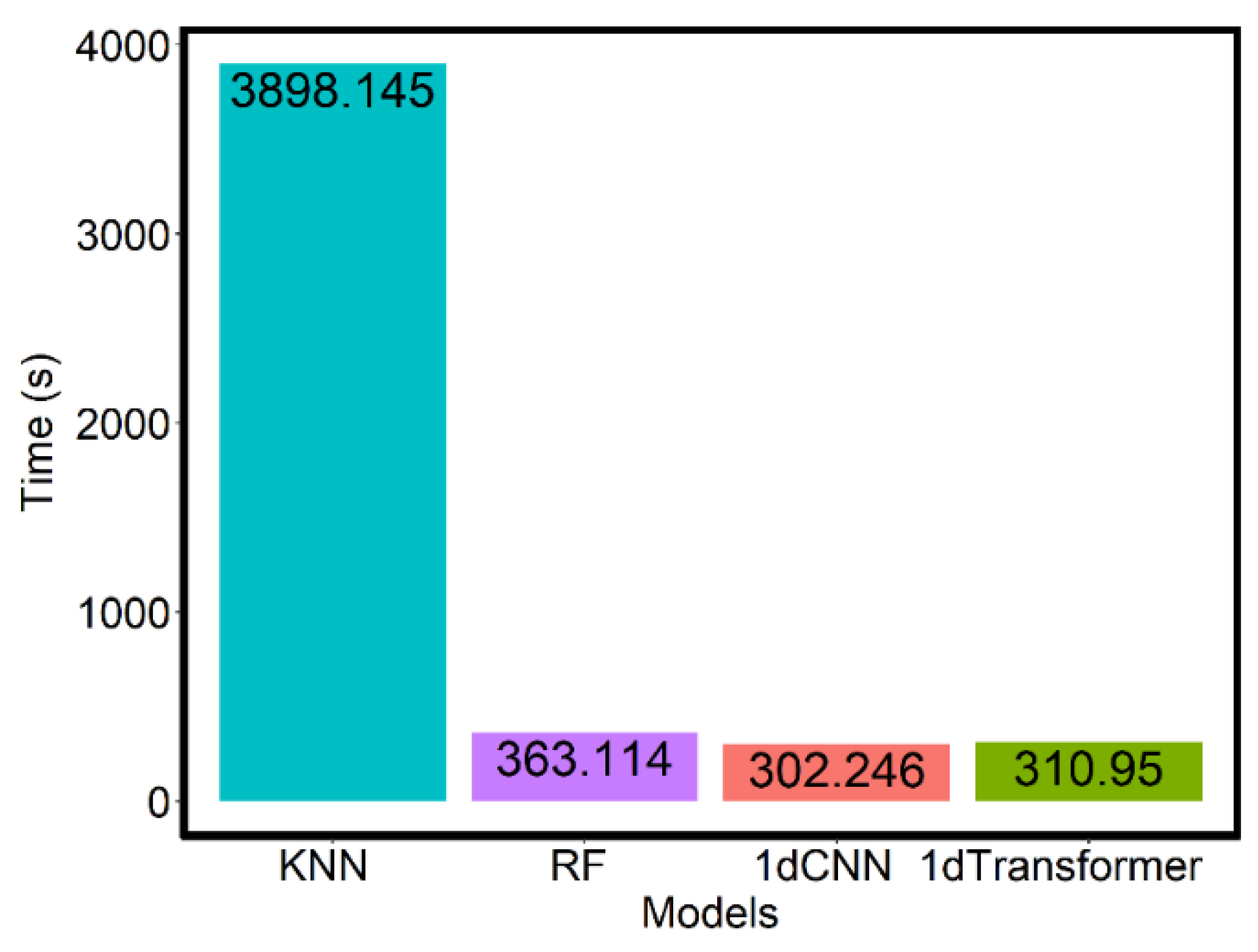
3.3. Inference Speed
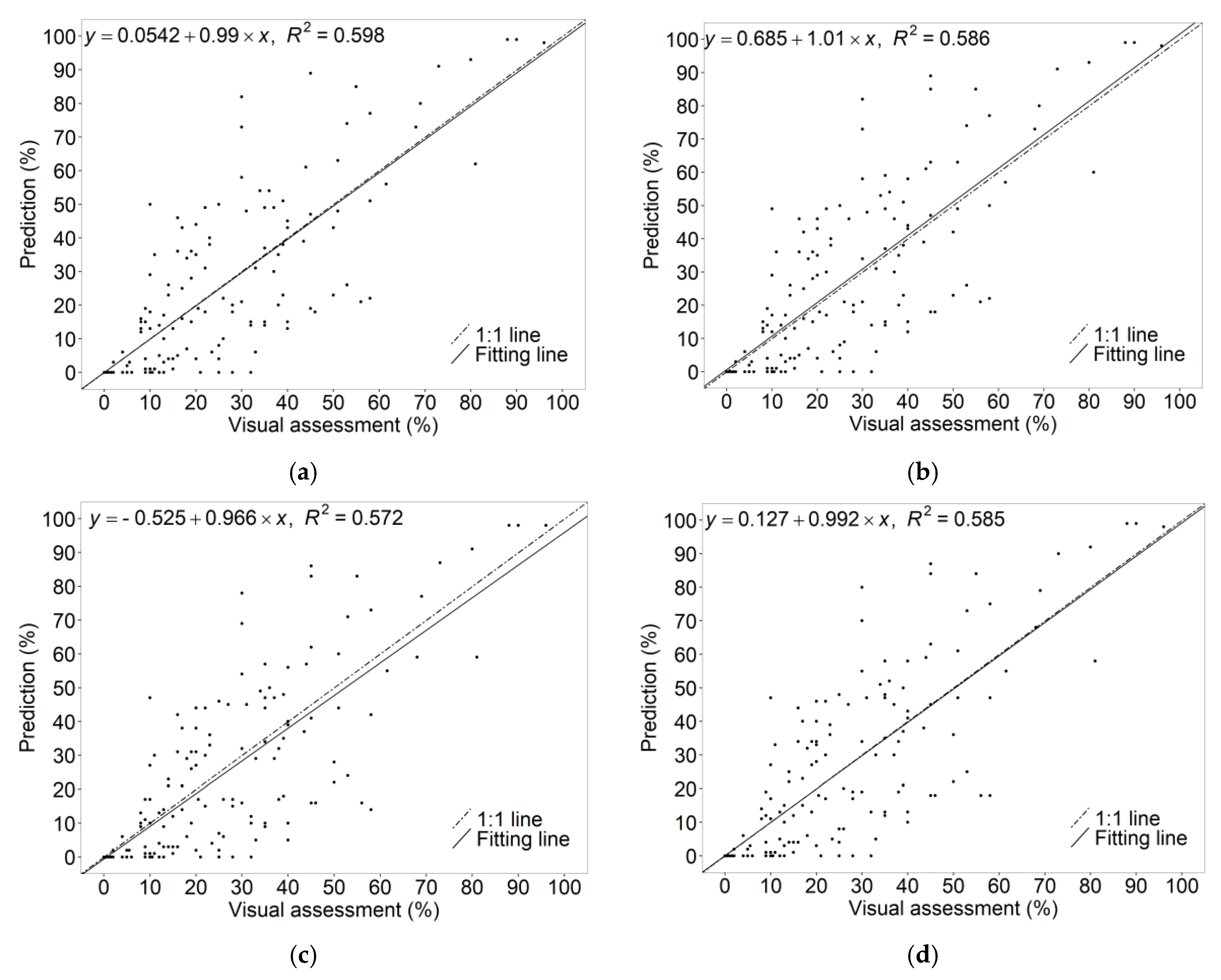
3.4. Model Testing against Ground Reference Data
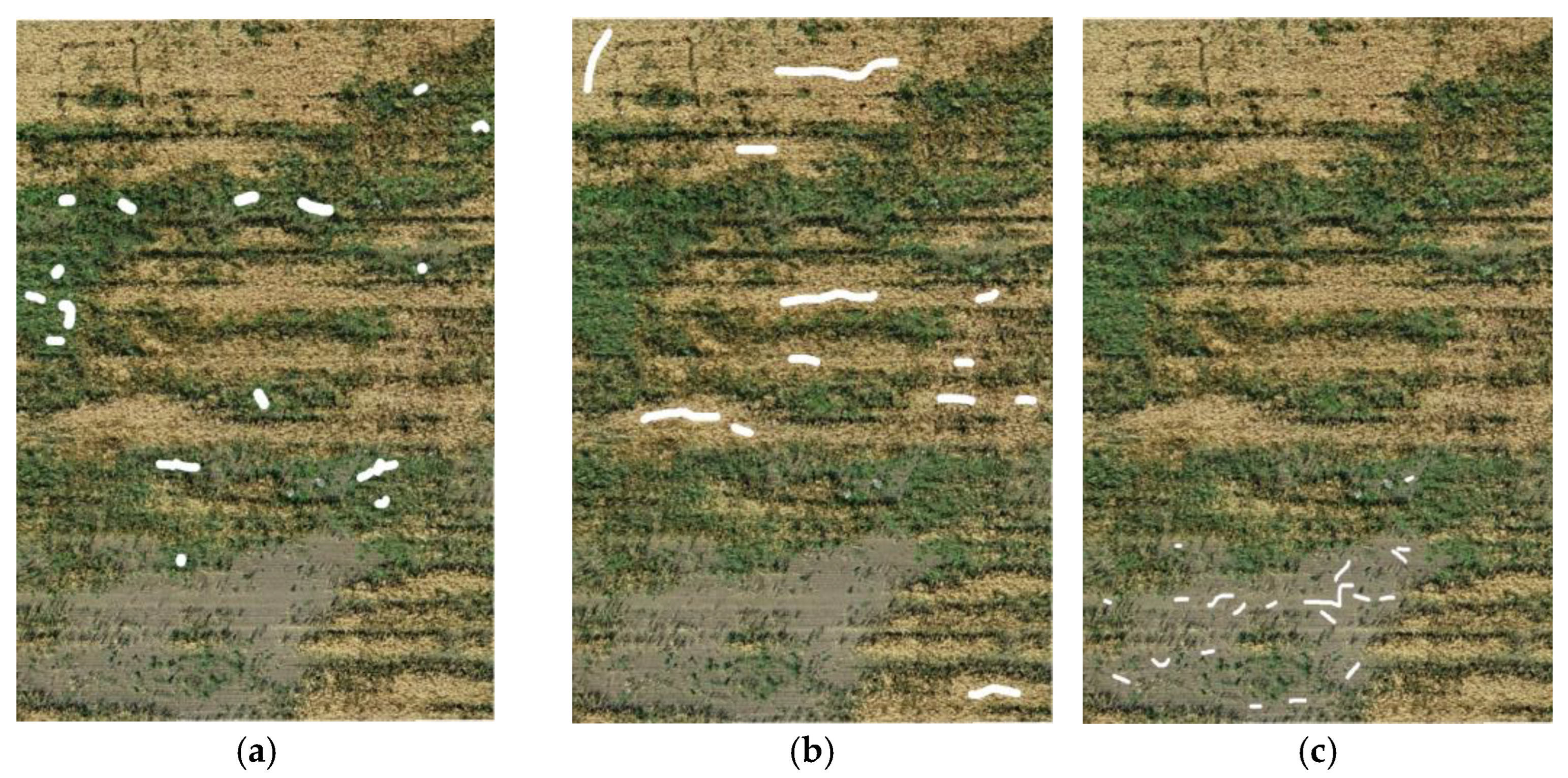
3.5. Weed Maps
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rew, L.J.; Cussans, G.W.; Mugglestone, M.A.; Miller, P.C.H. A Technique for Mapping the Spatial Distribution of Elymus Repots, with Estimates of the Potential Reduction in Herbicide Usage from Patch Spraying. Weed Res. 1996, 36, 283–292. [Google Scholar] [CrossRef]
- Hamouz, P.; Hamouzová, K.; Holec, J.; Tyšer, L. Impact of Site-Specific Weed Management on Herbicide Savings and Winter Wheat Yield. Plant Soil. Environ. 2013, 59, 101–107. [Google Scholar] [CrossRef]
- Blank, L.; Rozenberg, G.; Gafni, R. Spatial and Temporal Aspects of Weeds Distribution within Agricultural Fields–A Review. Crop Prot. 2023, 106300. [Google Scholar] [CrossRef]
- Fernández-Quintanilla, C.; Peña, J.M.; Andújar, D.; Dorado, J.; Ribeiro, A.; López-Granados, F. Is the Current State of the Art of Weed Monitoring Suitable for Site-specific Weed Management in Arable Crops? Weed Res. 2018, 58, 259–272. [Google Scholar] [CrossRef]
- Timmermann, C.; Gerhards, R.; Kühbauch, W. The Economic Impact of Site-Specific Weed Control. Precis. Agric. 2003, 4, 249–260. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; Serrano-Pérez, A.; de Castro, A.I.; Mesas-Carrascosa, F.-J.; Peña, J.-M. Early Season Weed Mapping in Sunflower Using UAV Technology: Variability of Herbicide Treatment Maps against Weed Thresholds. Precis. Agric. 2016, 17, 183–199. [Google Scholar] [CrossRef]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the Potential of Images from Unmanned Aerial Vehicles (UAV) to Support Herbicide Patch Spraying in Maize. Precis. Agric. 2017, 18, 76–94. [Google Scholar] [CrossRef]
- Coleman, G.R.Y.; Bender, A.; Hu, K.; Sharpe, S.M.; Schumann, A.W.; Wang, Z.; Bagavathiannan, M.V.; Boyd, N.S.; Walsh, M.J. Weed Detection to Weed Recognition: Reviewing 50 Years of Research to Identify Constraints and Opportunities for Large-Scale Cropping Systems. Weed Technol. 2022, 36, 741–757. [Google Scholar] [CrossRef]
- Barroso, J.; San Martin, C.; McCallum, J.D.; Long, D.S. Economic and Management Value of Weed Maps at Harvest in Semi-Arid Cropping Systems of the US Pacific Northwest. Precis. Agric. 2021, 22, 1936–1951. [Google Scholar] [CrossRef]
- Gerhards, R.; Andujar Sanchez, D.; Hamouz, P.; Peteinatos, G.G.; Christensen, S.; Fernandez-Quintanilla, C. Advances in Site-specific Weed Management in Agriculture—A Review. Weed Res. 2022, 62, 123–133. [Google Scholar] [CrossRef]
- Sapkota, R.; Stenger, J.; Ostlie, M.; Flores, P. Towards Reducing Chemical Usage for Weed Control in Agriculture Using UAS Imagery Analysis and Computer Vision Techniques. Sci. Rep. 2023, 13, 6548. [Google Scholar] [CrossRef] [PubMed]
- Coleman, G.R.Y.; Stead, A.; Rigter, M.P.; Xu, Z.; Johnson, D.; Brooker, G.M.; Sukkarieh, S.; Walsh, M.J. Using Energy Requirements to Compare the Suitability of Alternative Methods for Broadcast and Site-Specific Weed Control. Weed Technol. 2019, 33, 633–650. [Google Scholar] [CrossRef]
- Christensen, S.; Søgaard, H.T.; Kudsk, P.; Nørremark, M.; Lund, I.; Nadimi, E.S.; Jørgensen, R. Site-specific Weed Control Technologies. Weed Res. 2009, 49, 233–241. [Google Scholar] [CrossRef]
- Peteinatos, G.G.; Weis, M.; Andújar, D.; Rueda Ayala, V.; Gerhards, R. Potential Use of Ground-based Sensor Technologies for Weed Detection. Pest. Manag. Sci. 2014, 70, 190–199. [Google Scholar] [CrossRef] [PubMed]
- Lati, R.N.; Rasmussen, J.; Andujar, D.; Dorado, J.; Berge, T.W.; Wellhausen, C.; Pflanz, M.; Nordmeyer, H.; Schirrmann, M.; Eizenberg, H. Site-specific Weed Management—Constraints and Opportunities for the Weed Research Community: Insights from a Workshop. Weed Res. 2021, 61, 147–153. [Google Scholar] [CrossRef]
- Barroso, J.; Ruiz, D.; Fernandez-Quintanilla, C.; Leguizamon, E.S.; Hernaiz, P.; Ribeiro, A.; Díaz, B.; Maxwell, B.D.; Rew, L.J. Comparison of Sampling Methodologies for Site-specific Management of Avena Sterilis. Weed Res. 2005, 45, 165–174. [Google Scholar] [CrossRef]
- Shahbazi, N.; Ashworth, M.B.; Callow, J.N.; Mian, A.; Beckie, H.J.; Speidel, S.; Nicholls, E.; Flower, K.C. Assessing the Capability and Potential of LiDAR for Weed Detection. Sensors 2021, 21, 2328. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.M.; Wibowo, S.; Xu, C.-Y.; Morshed, A.; Wasimi, S.A.; Moore, S.; Rahman, S.M. Early Weed Detection Using Image Processing and Machine Learning Techniques in an Australian Chilli Farm. Agriculture 2021, 11, 387. [Google Scholar] [CrossRef]
- Xia, F.; Quan, L.; Lou, Z.; Sun, D.; Li, H.; Lv, X. Identification and Comprehensive Evaluation of Resistant Weeds Using Unmanned Aerial Vehicle-Based Multispectral Imagery. Front. Plant Sci. 2022, 13, 938604. [Google Scholar] [CrossRef]
- Esposito, M.; Crimaldi, M.; Cirillo, V.; Sarghini, F.; Maggio, A. Drone and Sensor Technology for Sustainable Weed Management: A Review. Chem. Biol. Technol. Agric. 2021, 8, 1–11. [Google Scholar] [CrossRef]
- Yang, W.; Wang, S.; Zhao, X.; Zhang, J.; Feng, J. Greenness Identification Based on HSV Decision Tree. Inf. Process. Agric. 2015, 2, 149–160. [Google Scholar] [CrossRef]
- Anderegg, J.; Tschurr, F.; Kirchgessner, N.; Treier, S.; Schmucki, M.; Streit, B.; Walter, A. On-Farm Evaluation of UAV-Based Aerial Imagery for Season-Long Weed Monitoring under Contrasting Management and Pedoclimatic Conditions in Wheat. Comput. Electron. Agric. 2023, 204, 107558. [Google Scholar] [CrossRef]
- Rasmussen, J.; Nielsen, J.; Streibig, J.C.; Jensen, J.E.; Pedersen, K.S.; Olsen, S.I. Pre-Harvest Weed Mapping of Cirsium arvense in Wheat and Barley with off-the-Shelf UAVs. Precis. Agric. 2019, 20, 983–999. [Google Scholar] [CrossRef]
- Hamouz, P.; Hamouzová, K.; Soukup, J. Detection of Cirsium arvense L. in Cereals Using a Multispectral Imaging and Vegetation Indices. Herbologia 2009, 10, 41–48. [Google Scholar]
- Liu, B.; Bruch, R. Weed Detection for Selective Spraying: A Review. Curr. Robot. Rep. 2020, 1, 19–26. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, W.; Wei, X. A Review on Weed Detection Using Ground-Based Machine Vision and Image Processing Techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Ahmed, F.; Al-Mamun, H.A.; Bari, A.S.M.H.; Hossain, E.; Kwan, P. Classification of Crops and Weeds from Digital Images: A Support Vector Machine Approach. Crop Prot. 2012, 40, 98–104. [Google Scholar] [CrossRef]
- Su, J.; Yi, D.; Coombes, M.; Liu, C.; Zhai, X.; McDonald-Maier, K.; Chen, W.-H. Spectral Analysis and Mapping of Blackgrass Weed by Leveraging Machine Learning and UAV Multispectral Imagery. Comput. Electron. Agric. 2022, 192, 106621. [Google Scholar] [CrossRef]
- Gašparović, M.; Zrinjski, M.; Barković, Đ.; Radočaj, D. An Automatic Method for Weed Mapping in Oat Fields Based on UAV Imagery. Comput. Electron. Agric. 2020, 173, 105385. [Google Scholar] [CrossRef]
- Alahmari, F.; Naim, A.; Alqahtani, H. E-Learning Modeling Technique and Convolution Neural Networks in Online Education. In IoT-Enabled Convolutional Neural Networks: Techniques and Applications; River Publishers: Aalborg, Denmark, 2023; pp. 261–295. [Google Scholar]
- Krichen, M. Convolutional Neural Networks: A Survey. Computers 2023, 12, 151. [Google Scholar] [CrossRef]
- Ofori, M.; El-Gayar, O.F. Towards Deep Learning for Weed Detection: Deep Convolutional Neural Network Architectures for Plant Seedling Classification. In Proceedings of the AMCIS 2020 Conference, Salt Lake City, UT, USA, 10–14 August 2020. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Hashemi-Beni, L.; Gebrehiwot, A.; Karimoddini, A.; Shahbazi, A.; Dorbu, F. Deep Convolutional Neural Networks for Weeds and Crops Discrimination from UAS Imagery. Front. Remote Sens. 2022, 3, 1. [Google Scholar] [CrossRef]
- Xu, K.; Shu, L.; Xie, Q.; Song, M.; Zhu, Y.; Cao, W.; Ni, J. Precision Weed Detection in Wheat Fields for Agriculture 4.0: A Survey of Enabling Technologies, Methods, and Research Challenges. Comput. Electron. Agric. 2023, 212, 108106. [Google Scholar] [CrossRef]
- Huang, H.; Lan, Y.; Deng, J.; Yang, A.; Deng, X.; Zhang, L.; Wen, S. A Semantic Labeling Approach for Accurate Weed Mapping of High Resolution UAV Imagery. Sensors 2018, 18, 2113. [Google Scholar] [CrossRef] [PubMed]
- Fawakherji, M.; Youssef, A.; Bloisi, D.; Pretto, A.; Nardi, D. Crop and Weeds Classification for Precision Agriculture Using Context-Independent Pixel-Wise Segmentation. In Proceedings of the Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 146–152. [Google Scholar]
- Milioto, A.; Lottes, P.; Stachniss, C. Real-Time Semantic Segmentation of Crop and Weed for Precision Agriculture Robots Leveraging Background Knowledge in CNNs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2229–2235. [Google Scholar]
- Lameski, P.; Zdravevski, E.; Trajkovik, V.; Kulakov, A. Weed Detection Dataset with RGB Images Taken under Variable Light Conditions. In ICT Innovations 2017: Data-Driven Innovation, Proceedings of the 9th International Conference, ICT Innovations 2017, Skopje, Macedonia, 18–23 September 2017, Proceedings 9; Springer: Berlin/Heidelberg, Germany, 2017; pp. 112–119. [Google Scholar]
- Fraccaro, P.; Butt, J.; Edwards, B.; Freckleton, R.P.; Childs, D.Z.; Reusch, K.; Comont, D. A Deep Learning Application to Map Weed Spatial Extent from Unmanned Aerial Vehicles Imagery. Remote Sens. 2022, 14, 4197. [Google Scholar] [CrossRef]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar]
- Xie, E.; Wang, W.; Yu, Z.; Anandkumar, A.; Alvarez, J.M.; Luo, P. SegFormer: Simple and Efficient Design for Semantic Segmentation with Transformers. Adv. Neural Inf. Process Syst. 2021, 34, 12077–12090. [Google Scholar]
- Strudel, R.; Garcia, R.; Laptev, I.; Schmid, C. Segmenter: Transformer for Semantic Segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 7262–7272. [Google Scholar]
- Horwath, J.P.; Zakharov, D.N.; Mégret, R.; Stach, E.A. Understanding Important Features of Deep Learning Models for Segmentation of High-Resolution Transmission Electron Microscopy Images. NPJ Comput. Mater. 2020, 6, 108. [Google Scholar] [CrossRef]
- Bosilj, P.; Aptoula, E.; Duckett, T.; Cielniak, G. Transfer Learning between Crop Types for Semantic Segmentation of Crops versus Weeds in Precision Agriculture. J. Field Robot. 2020, 37, 7–19. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S. An Image Is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Reedha, R.; Dericquebourg, E.; Canals, R.; Hafiane, A. Transformer Neural Network for Weed and Crop Classification of High Resolution UAV Images. Remote Sens. 2022, 14, 592. [Google Scholar] [CrossRef]
- Liang, J.; Wang, D.; Ling, X. Image Classification for Soybean and Weeds Based on VIT. Proc. J. Phys. Conf. Ser. 2021, 2002, 12068. [Google Scholar] [CrossRef]
- Jiang, K.; Afzaal, U.; Lee, J. Transformer-Based Weed Segmentation for Grass Management. Sensors 2023, 23, 65. [Google Scholar] [CrossRef] [PubMed]
- Forbord, M.; Vik, J. Food, Farmers, and the Future: Investigating Prospects of Increased Food Production within a National Context. Land Use Policy 2017, 67, 546–557. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Altman, N.S. An Introduction to Kernel and Nearest-Neighbor Nonparametric Regression. Am. Stat. 1992, 46, 175–185. [Google Scholar]
- Ma, X.; Deng, X.; Qi, L.; Jiang, Y.; Li, H.; Wang, Y.; Xing, X. Fully Convolutional Network for Rice Seedling and Weed Image Segmentation at the Seedling Stage in Paddy Fields. PLoS ONE 2019, 14, e0215676. [Google Scholar] [CrossRef] [PubMed]
- Thanh Noi, P.; Kappas, M. Comparison of Random Forest, k-Nearest Neighbor, and Support Vector Machine Classifiers for Land Cover Classification Using Sentinel-2 Imagery. Sensors 2017, 18, 18. [Google Scholar] [CrossRef] [PubMed]
- Buitinck, L.; Louppe, G.; Blondel, M.; Pedregosa, F.; Mueller, A.; Grisel, O.; Niculae, V.; Prettenhofer, P.; Gramfort, A.; Grobler, J. API Design for Machine Learning Software: Experiences from the Scikit-Learn Project. arXiv 2013, arXiv:1309.0238. [Google Scholar]
- Ali, J.; Khan, R.; Ahmad, N.; Maqsood, I. Random Forests and Decision Trees. Int. J. Comput. Sci. 2012, 9, 272. [Google Scholar]
- Chicco, D.; Warrens, M.J.; Jurman, G. The Coefficient of Determination R-Squared Is More Informative than SMAPE, MAE, MAPE, MSE and RMSE in Regression Analysis Evaluation. PeerJ. Comput. Sci. 2021, 7, e623. [Google Scholar] [CrossRef]
- Zhao, J.; Qu, Y.; Ninomiya, S.; Guo, W. Endmember-Assisted Camera Response Function Learning, Toward Improving Hyperspectral Image Super-Resolution Performance. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Zhao, J.; Kaga, A.; Yamada, T.; Komatsu, K.; Hirata, K.; Kikuchi, A.; Hirafuji, M.; Ninomiya, S.; Guo, W. Improved Field-Based Soybean Seed Counting and Localization with Feature Level Considered. Plant Phenomics 2023, 5, 26. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Janiesch, C.; Zschech, P.; Heinrich, K. Machine Learning and Deep Learning. Electron. Mark. 2021, 31, 685–695. [Google Scholar] [CrossRef]
- Onishi, M.; Ise, T. Explainable Identification and Mapping of Trees Using UAV RGB Image and Deep Learning. Sci. Rep. 2021, 11, 903. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.; Zheng, Y.; Zhang, L.; Zheng, Y.; Huang, H. Simultaneous Hyperspectral Image Super-Resolution and Geometric Alignment with a Hybrid Camera System. Neurocomputing 2020, 384, 282–294. [Google Scholar] [CrossRef]
- Rasmussen, J.; Azim, S.; Nielsen, J. Pre-Harvest Weed Mapping of Cirsium arvense L. Based on Free Satellite Imagery–The Importance of Weed Aggregation and Image Resolution. Eur. J. Agron. 2021, 130, 126373. [Google Scholar] [CrossRef]
- Heijting, S.; Van Der Werf, W.; Stein, A.; Kropff, M.J. Are Weed Patches Stable in Location? Application of an Explicitly Two-dimensional Methodology. Weed Res. 2007, 47, 381–395. [Google Scholar] [CrossRef]
- Oerke, E.-C.; Gerhards, R.; Menz, G.; Sikora, R.A. Precision Crop Protection-the Challenge and Use of Heterogeneity; Springer: Berlin/Heidelberg, Germany, 2010; Volume 5. [Google Scholar]
- Weigel, M.M.; Andert, S.; Gerowitt, B. Monitoring Patch Expansion Amends to Evaluate the Effects of Non-Chemical Control on the Creeping Perennial Cirsium arvense (L.) Scop. in a Spring Wheat Crop. Agronomy 2023, 13, 1474. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | ID | Crop Species | Ground Reference Data | Perennial Weed Species | Annual (Biennial) Weed Species | UAV Flight * |
|---|---|---|---|---|---|---|
| 1 | Aas | Barley (2-row) | 06.08.2020 | Elymus repens | Viola arvensis | 06.08.2020 (0) |
| 2 | Vestby | Barley (2-row) | 06.08.2020 | E. repens | Poa annua | 06.08.2020 (0) |
| 3 | Frogn | Barley (2-row) | 06.08.2020 | E. repens | V. arvensis | 06.08.2020 (0) |
| 4 | Blaestad | Barley | 10.08.2020 | E. repens | P. annua, V. arvensis | 11.08.2020 (1) |
| 5 | Aalstad_1 | Barley | 11.08.2020 | Cirsium arvense | P. annua | 11.08.2020 (0) |
| 6 | Aalstad_2 | Barley | 12.08.2020 | C. arvense | P. annua | 11.08.2020 (1) |
| 7 | Krogsrud | Wheat (spring) | 05.08.2021 | E. repens (Artemisia vulgaris, C. arvense) | P. annua | 10.08.2021 (5) |
| 8 | Roed | Oat | 05.08.2021 | C. arvense (Mentha sp.) | (Not registered) | 10.08.2021 (5) |
| 9 | Krukkegaarden | Barley | 05.08.2021 | E. repens (C. arvense) | Tripleurospermum inodorum | 10.08.2021 (5) |
| 10 | Sinnerud | Barley | 09.08.2021 | E. repens, C. arvense, A. vulgaris | Erodium cicutarium, Sonchus asper | 11.08.2021 (2) |
| 11 | Soerum | Wheat (spring) | 09.08.2021 | E. repens, C. arvense (Vicia cracca) | Capsella bursa-pastoris, Persicaria maculosa, P. annua | 11.08.2021 (2) |
| 12 | Vestad | Barley | 09.08.2021 | E. repens, C. arvense, Sonchus arvensis | Stellaria media, Polygonum aviculare, P. annua, Fumaria officinalis, S. asper | 11.08.2021 (2) |
| 13 | Olstad | Barley (6-row) | 01.08.2022 | C. arvense (E. repens) | V. arvensis, F. officinalis, T. inodorum, S. asper, S. media, P. aviculare, vol. wheat | 05.08.2022 (4) |
| 14 | Soeraas | Wheat (winter) | 08.08.2022 | C. arvense, S. arvensis, E. repens, Stachys palustris (A. vulgaris) | Chenopodium album, S. asper | 10.08.2022 (2) |
| 15 | Tomte | Barley (6-row) | 22.08.2022 | E. repens (C. arvense) | (Not registered) | 25.08.2022 (3) |
| Model | OA (%) | Precision (%) | Recall (%) | F1-score | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Weed | Crop | Other | Weed | Crop | Other | Weed | Crop | Other | ||
| KNN | 98.669 | 98.915 | 98.296 | 98.957 | 97.472 | 98.821 | 98.675 | 0.98188 | 0.98558 | 0.98816 |
| RF | 98.600 | 99.163 | 98.061 | 98.996 | 96.857 | 98.915 | 98.532 | 0.97996 | 0.98486 | 0.98764 |
| 1DCNN | 98.687 | 98.618 | 98.384 | 98.951 | 97.981 | 98.754 | 98.711 | 0.98298 | 0.98569 | 0.98831 |
| 1DTransformer | 98.694 | 98.577 | 98.382 | 98.970 | 97.942 | 98.773 | 98.713 | 0.98259 | 0.98577 | 0.98841 |
| 1DTransformer without skip concatenation | 98.162 | 97.559 | 97.540 | 98.760 | 96.339 | 98.584 | 98.013 | 0.96946 | 0.98059 | 0.98385 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Berge, T.W.; Geipel, J. Transformer in UAV Image-Based Weed Mapping. Remote Sens. 2023, 15, 5165. https://doi.org/10.3390/rs15215165
Zhao J, Berge TW, Geipel J. Transformer in UAV Image-Based Weed Mapping. Remote Sensing. 2023; 15(21):5165. https://doi.org/10.3390/rs15215165
Chicago/Turabian StyleZhao, Jiangsan, Therese With Berge, and Jakob Geipel. 2023. "Transformer in UAV Image-Based Weed Mapping" Remote Sensing 15, no. 21: 5165. https://doi.org/10.3390/rs15215165
APA StyleZhao, J., Berge, T. W., & Geipel, J. (2023). Transformer in UAV Image-Based Weed Mapping. Remote Sensing, 15(21), 5165. https://doi.org/10.3390/rs15215165