
Combined Retrieval of Oil Film Thickness Using Hyperspectral and Thermal Infrared Remote Sensing

 ,
, 
Abstract
:
1. Introduction
- (1)
- The oil film thickness ranging from 200 to 1000 μm in the Bonn Agreement has been refined, and the retrieval of the oil film thickness has been conducted.
- (2)
- The study established the relationship between spectral reflectance, brightness temperature difference (BTD), and OT, constructed an OT retrieval model, and explored the suitable range for retrieving the OT using hyperspectral and thermal infrared remote sensing.
- (3)
- The study developed a decision-level fusion algorithm for OT retrieval using hyperspectral and thermal infrared remote sensing, enhancing the remote sensing capability for OT retrieval.
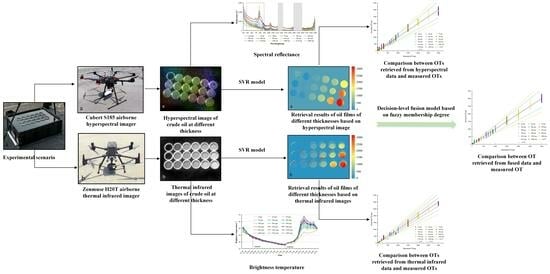
2. Materials and Methods
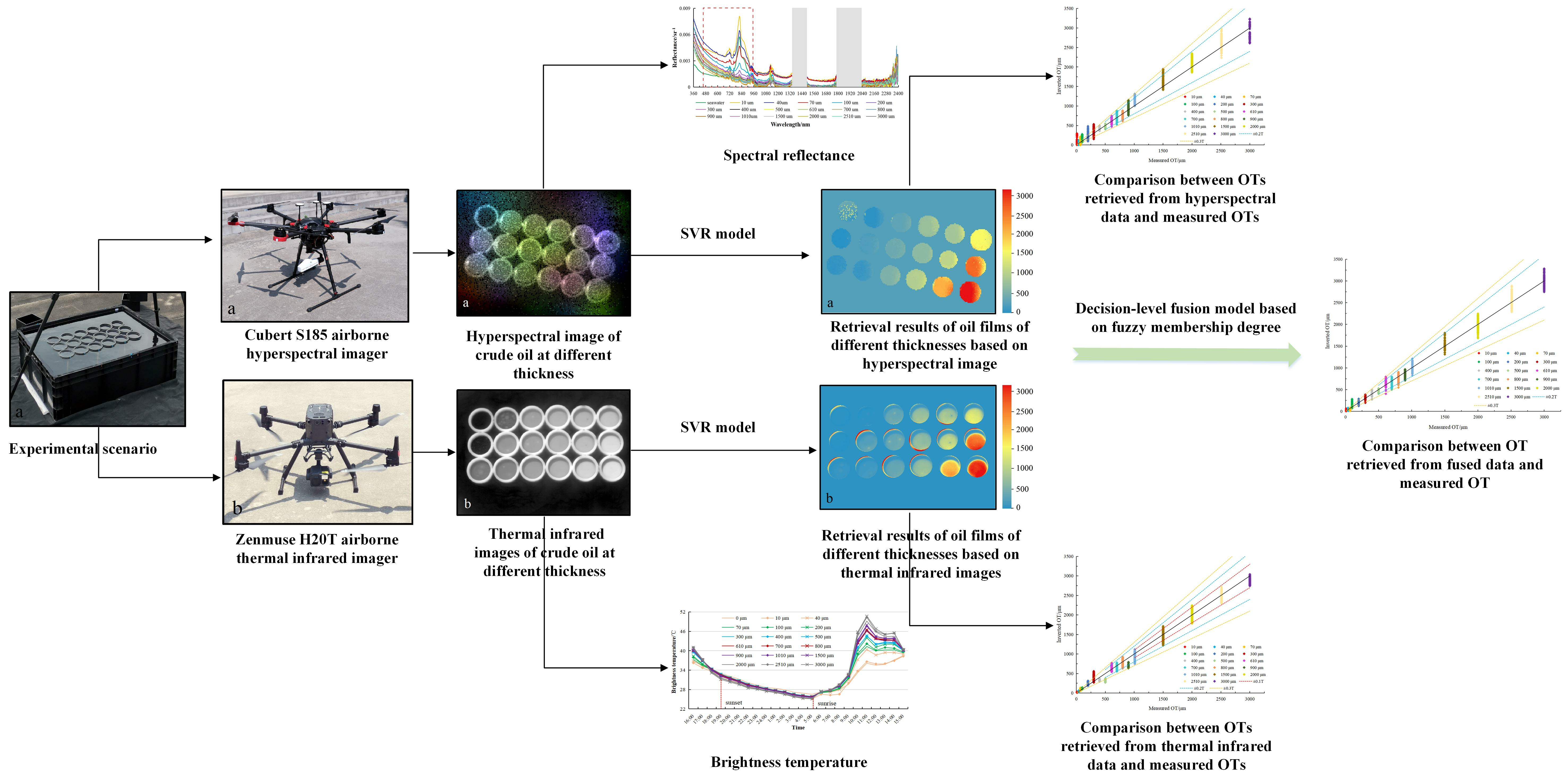
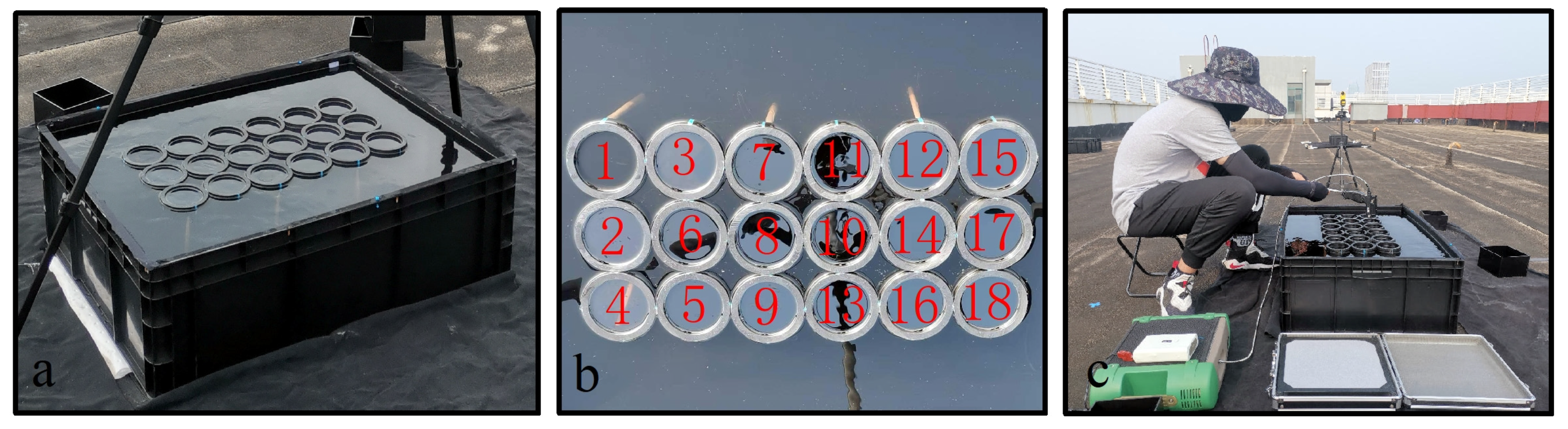
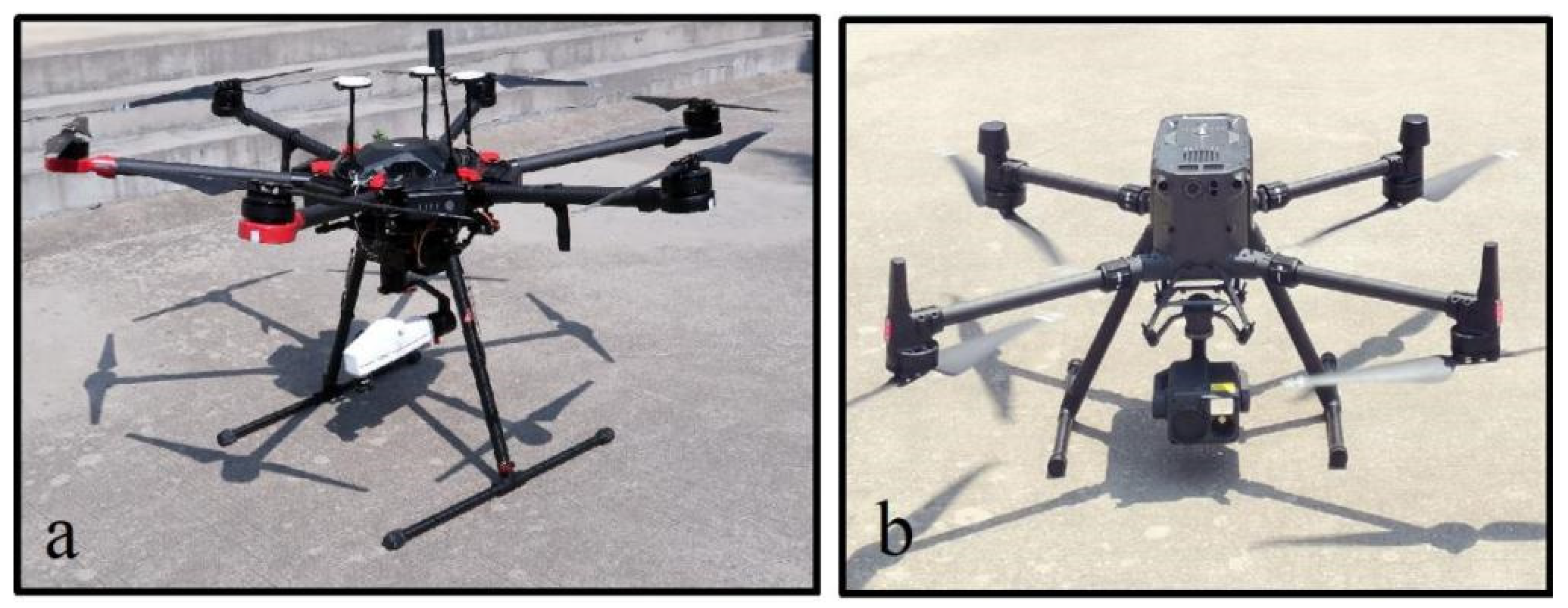
2.1. Experiment
2.2. Data
2.3. Methods
2.3.1. Support Vector Regression Model for Oil Film Thickness Retrieval
2.3.2. Decision-Level Fusion Model Based on Fuzzy Membership Degree
- When , if , then ;
- When and , if , then , otherwise, ;
- When , if and , then ; otherwise, if and , then ;
- When , if and , then ; otherwise, if and , then .
2.3.3. Accuracy Evaluation
3. Results and Analysis
3.1. Photothermal Response of Crude Oil at Different Thicknesses
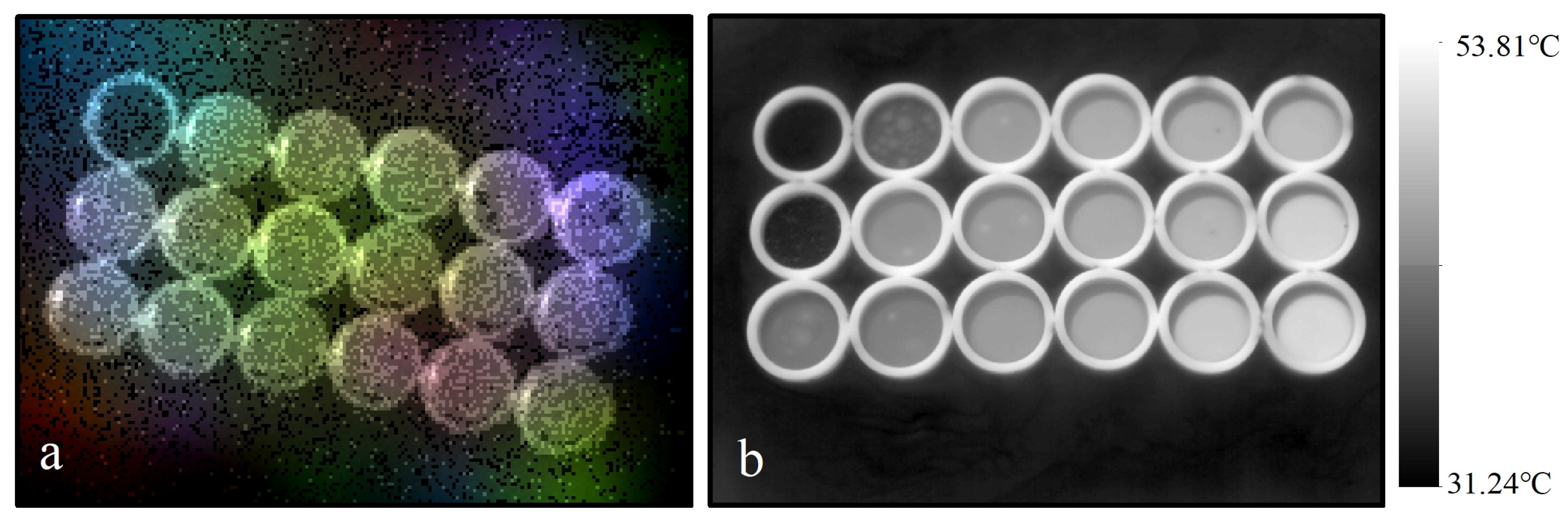
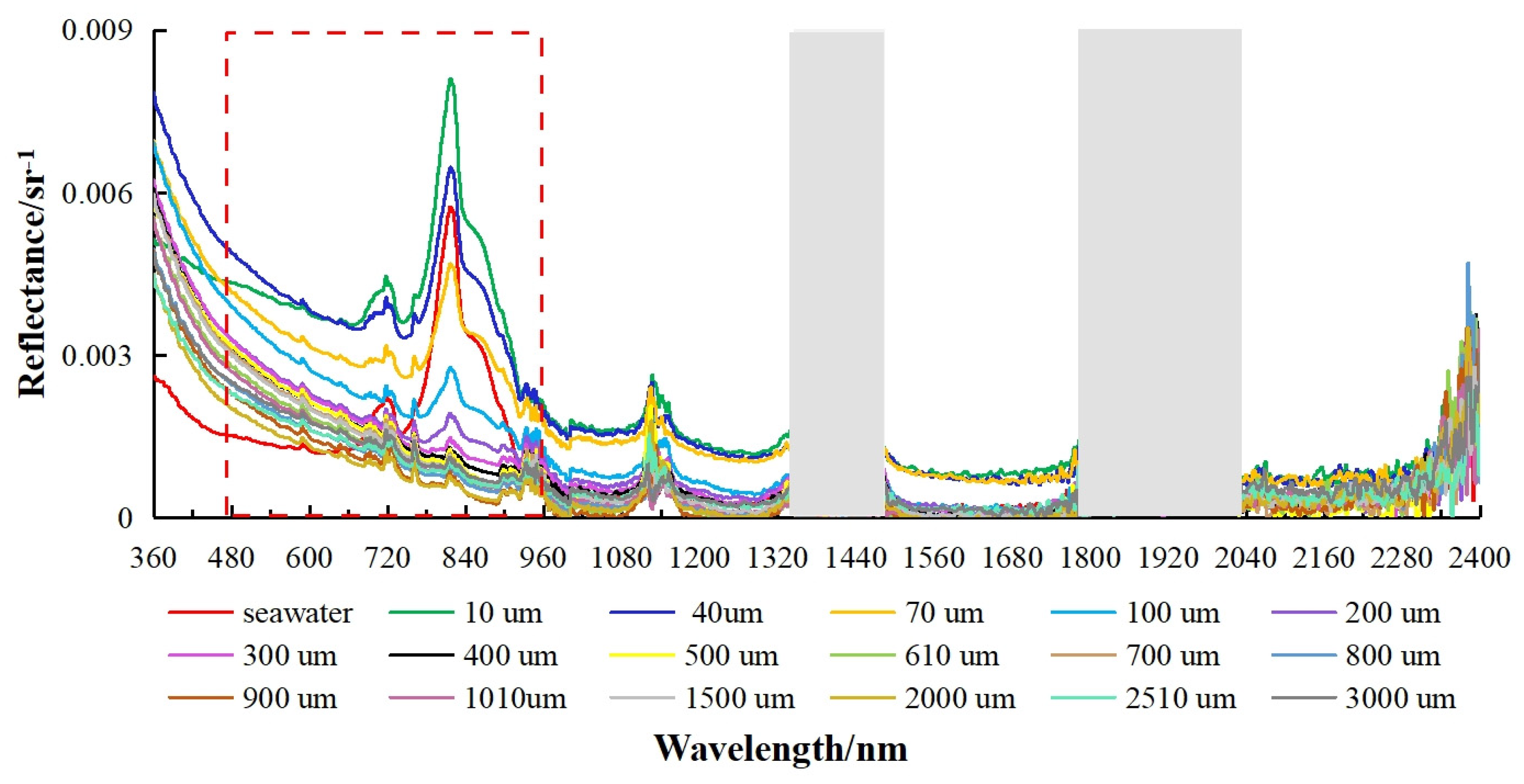
3.1.1. Spectral Characteristics of Oil Films of Different Thicknesses
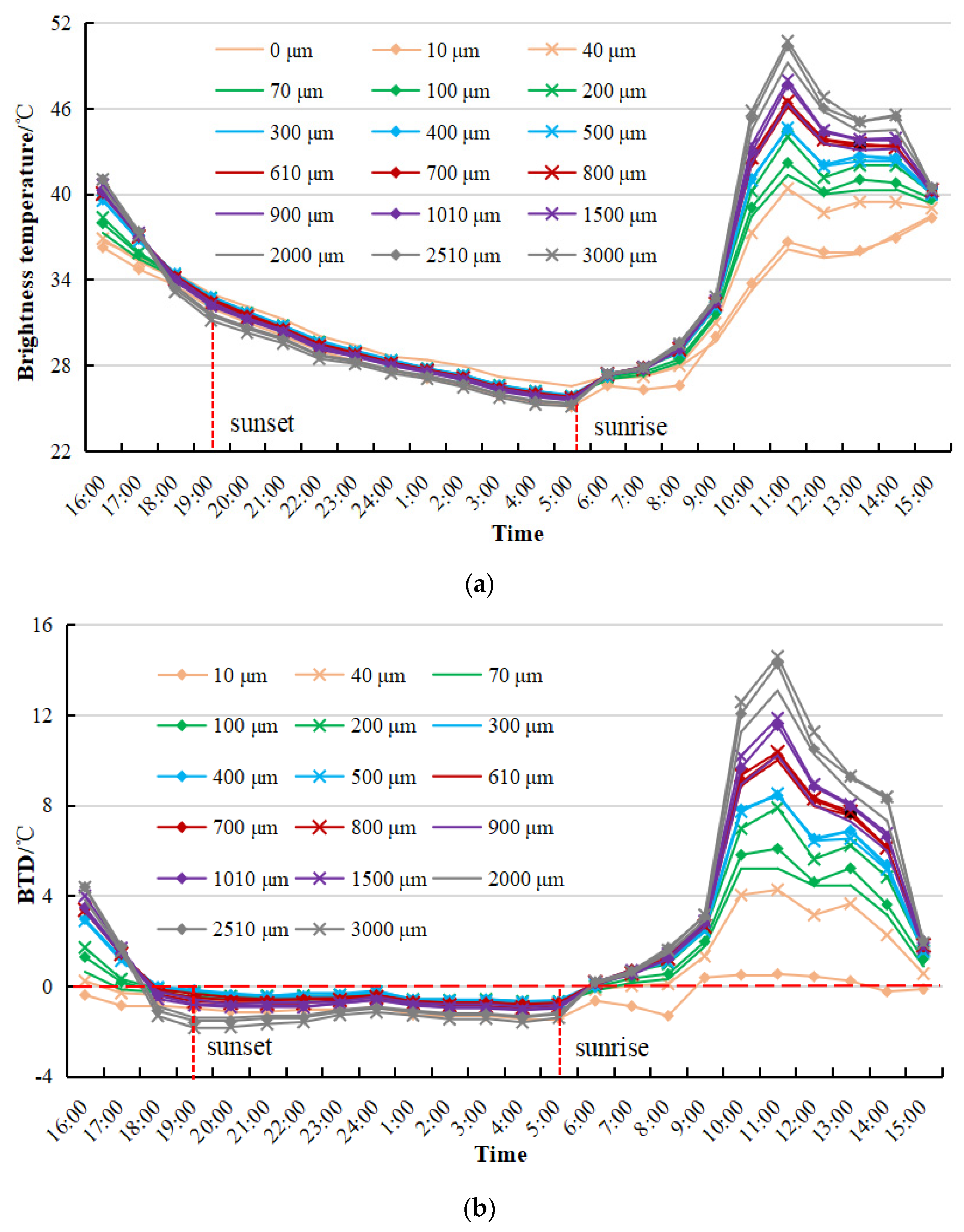
3.1.2. Thermal Response of Oil Films of Different Thicknesses
3.2. Retrieval Results of OT
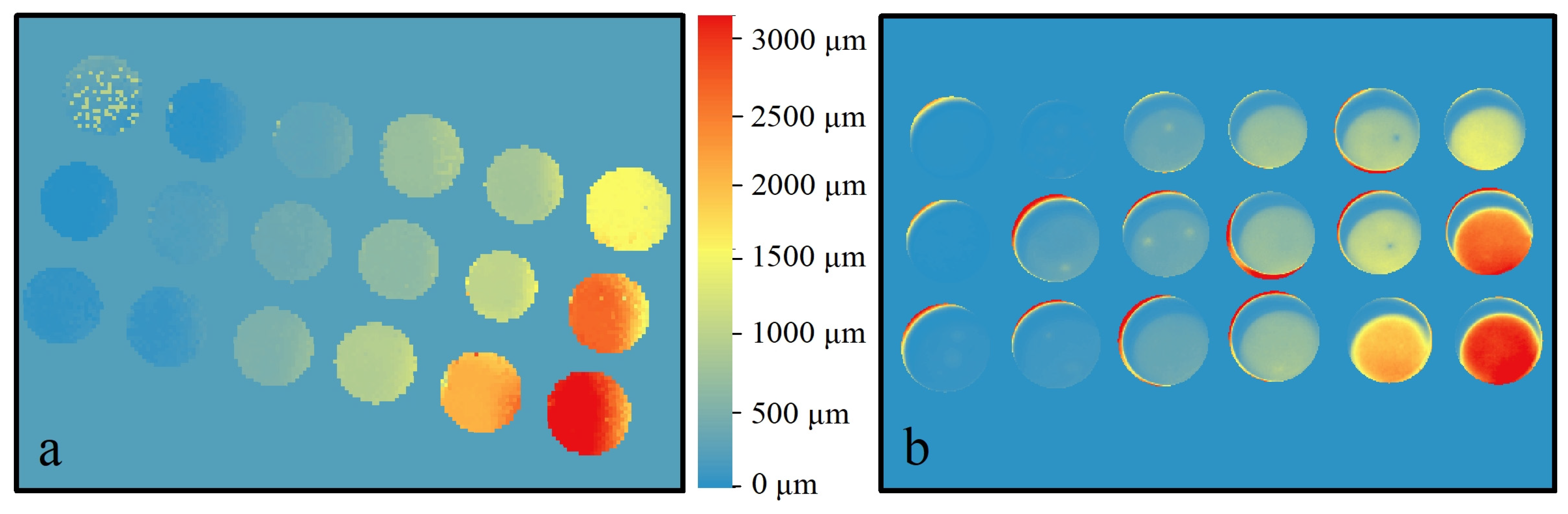
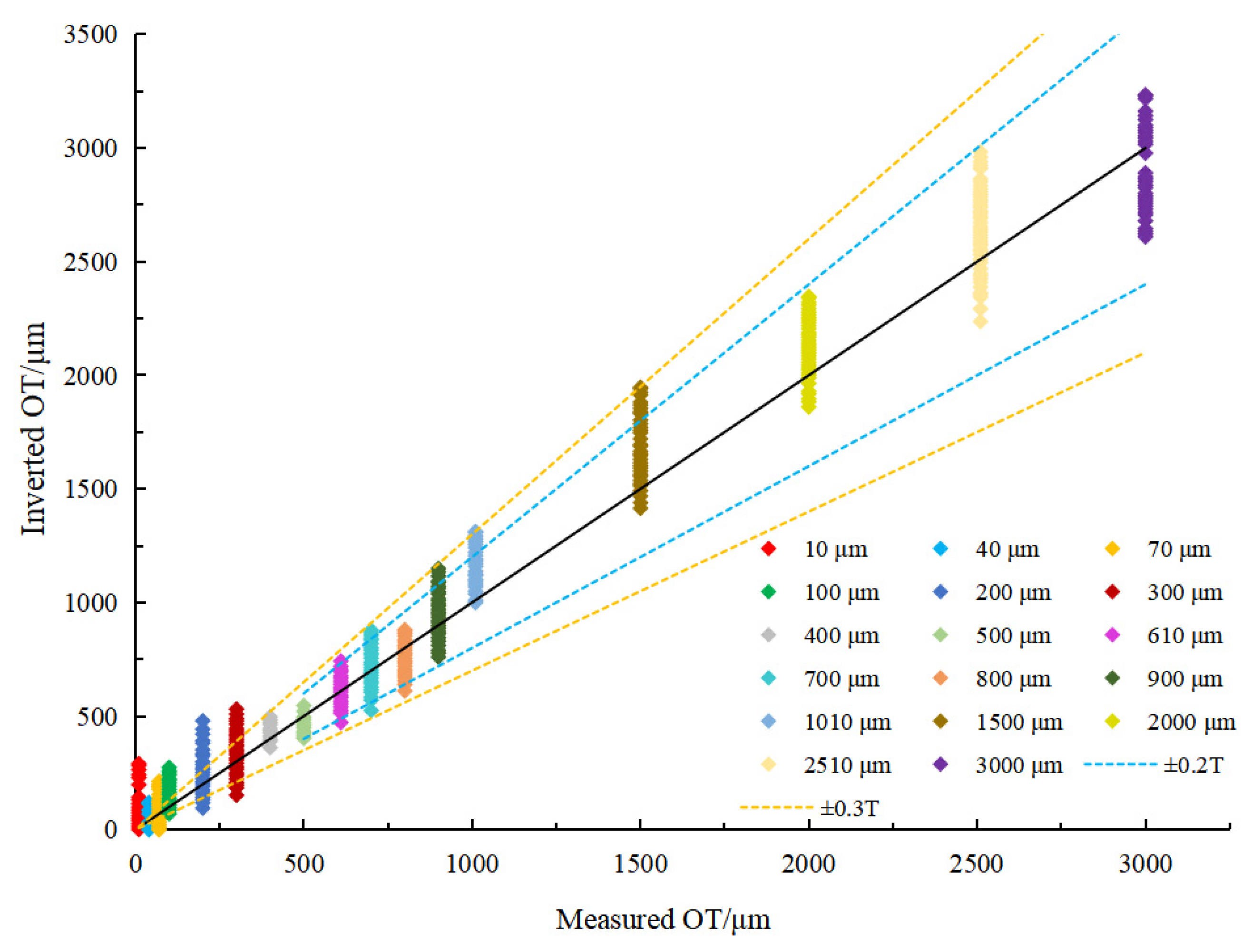
3.2.1. Retrieval Results of OT Using Hyperspectral Data
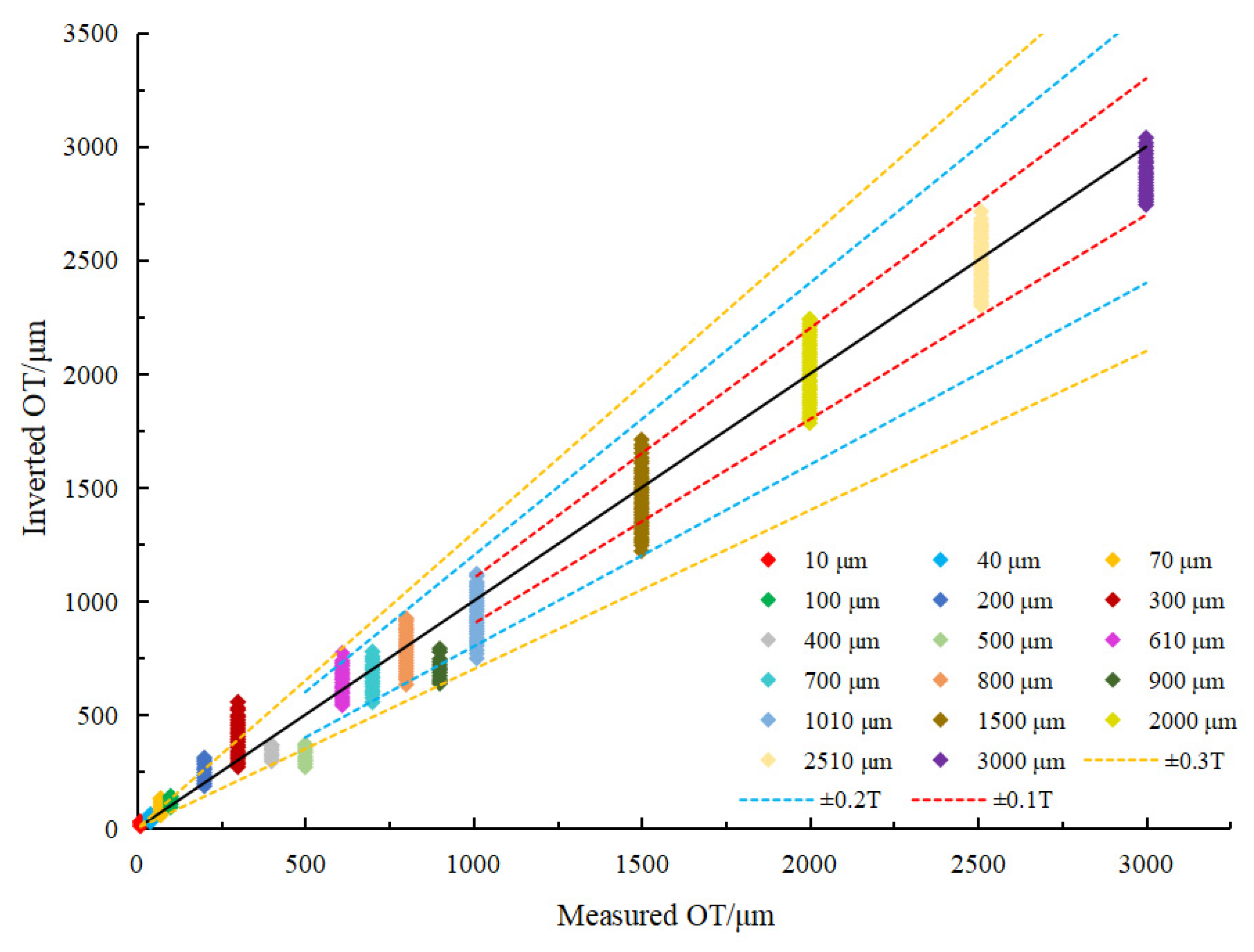
3.2.2. Retrieval Results of OT Using Thermal Infrared Data
3.3. The Suitable OT Range for Retrieval Using Hyperspectral and Thermal Infrared Data
3.3.1. The Suitable OT Range for Retrieval Using Hyperspectral Data
3.3.2. The Suitable OT Range for Retrieval Using Thermal Infrared Data
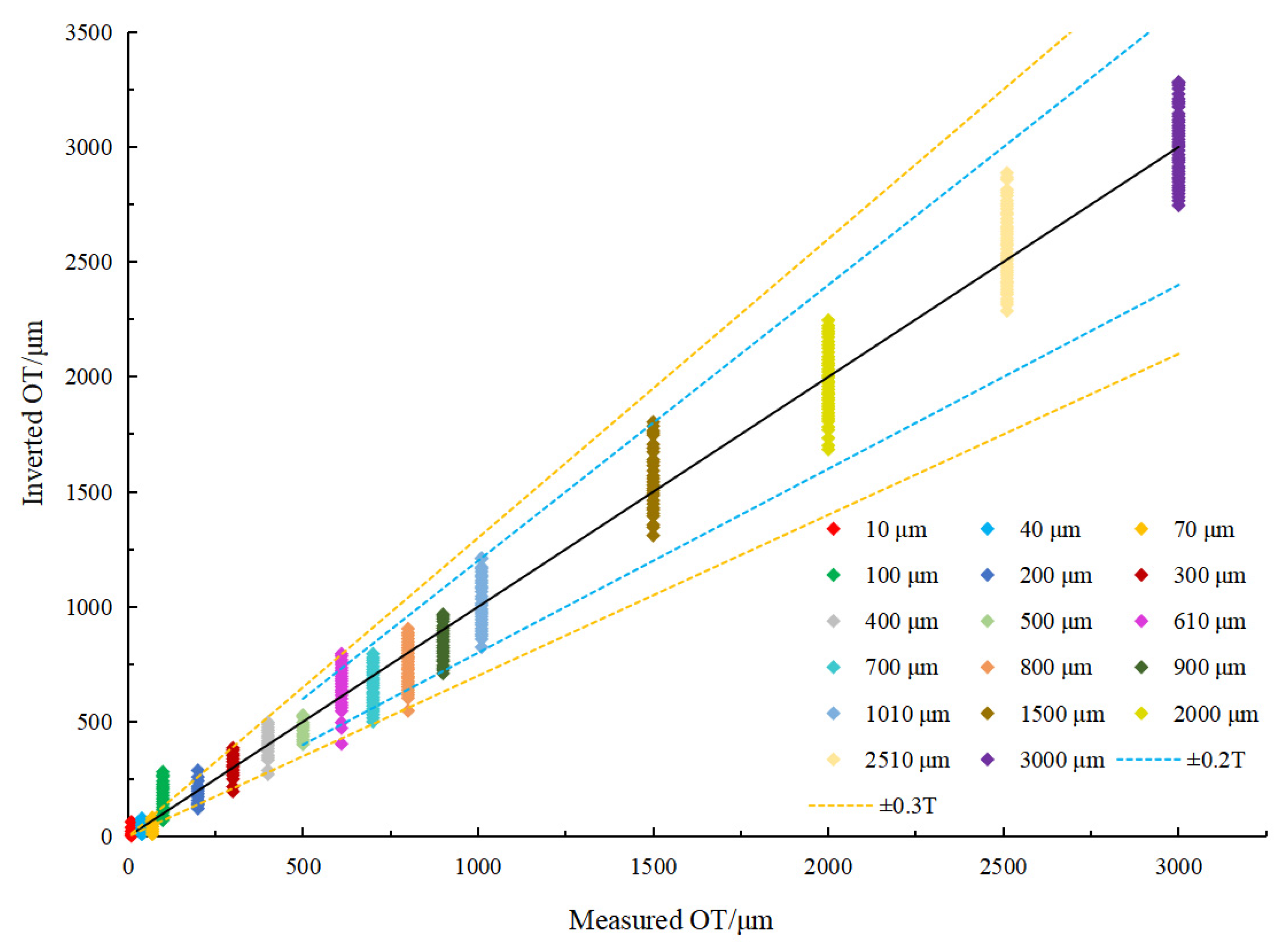
3.3.3. OT Derived from Decision-Level Fusion of Hyperspectral and Thermal Infrared Remote Sensing
4. Discussion
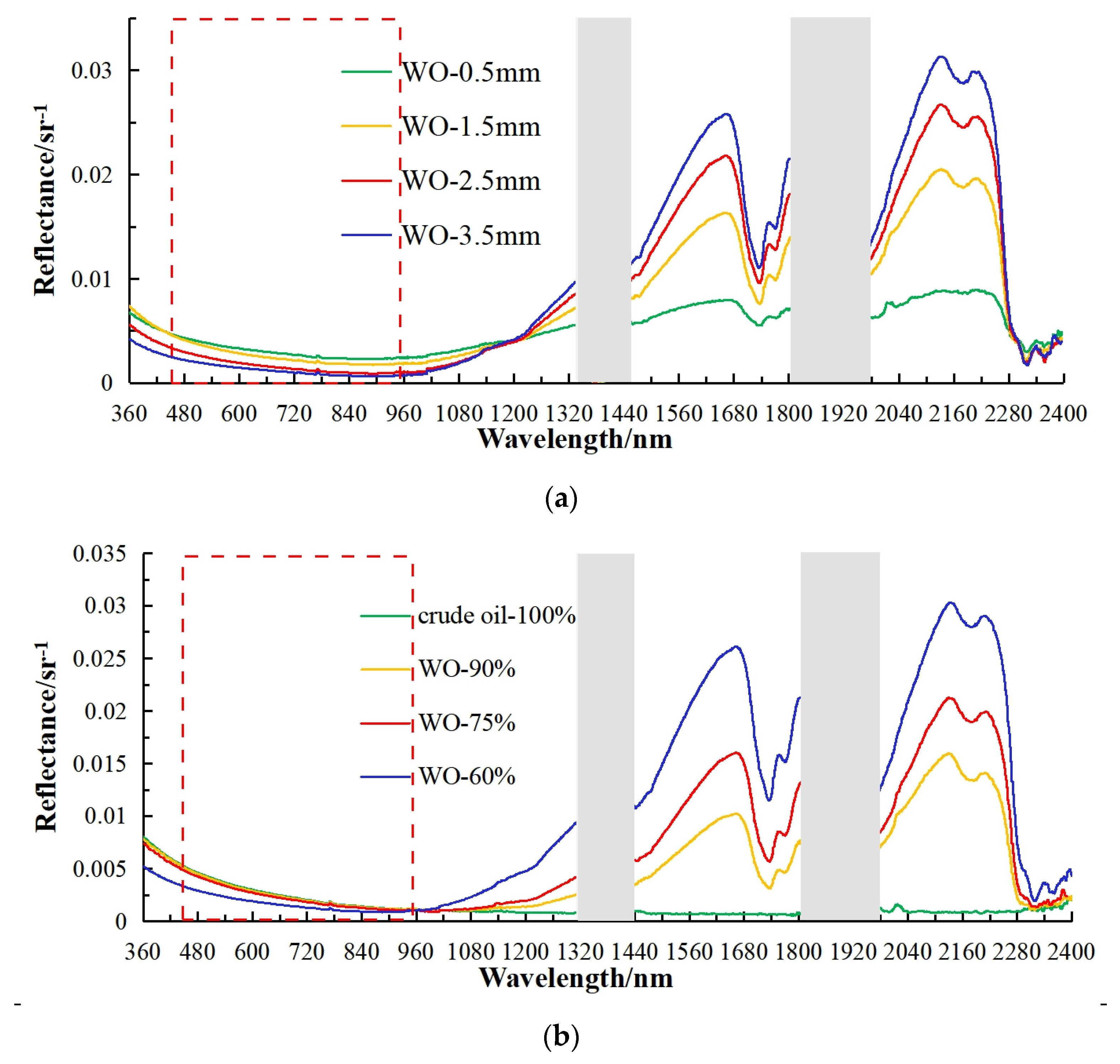
4.1. The Possibility of Detecting WO emulsions of Different Thicknesses Using Hyperspectral and Thermal Infrared Remote Sensing
4.1.1. Spectral Characteristics Analysis of WO Emulsions of Different Thicknesses at the Same Concentration
4.1.2. Thermal Characteristics Analysis of WO Emulsions of Different Thicknesses at the Same Concentration
4.2. Factors Affecting Experimental Results and Applicability
- (1)
- Deviations in crude oil quality measurement: The OT is calculated by dividing the mass of crude oil dropped into the ring with the density of oil and the area of the ring. According to the preset OT, the mass of crude oil that needs to be dropped into the ring is calculated. However, due to the limitations of the dropper, the mass of crude oil in the same ring needs to be weighed repeatedly to reach the desired thickness. The measurement error will directly affect the accuracy of the OT.
- (2)
- Not completely uniform OT: The oil films are placed in small circular rings to ensure a uniform diffusion as much as possible. However, it cannot be guaranteed that the OT of the selected training samples within the same circular ring is completely uniform. This can affect the accuracy of estimating the OT using the model.
- (3)
- Asynchronicity in data acquisition: The experiment uses an airborne hyperspectral imager and an airborne thermal infrared imager to obtain the OT data separately. Although the time interval between the two imaging processes is minimized, the two sensors are not on the same drone, making it impossible to obtain synchronous data at the same imaging angle. This can have a certain impact on estimating the OT.
- (4)
- The effects of solar elevation angle, air temperature, wind speed, and evaporation are not analyzed: The experiment was conducted for 24 consecutive hours. Under certain sensor sensitivity conditions, a different solar elevation angle can directly affect the quality of the spectrum and brightness temperature data. At the same time, the oil film may evaporate with changes in temperature and wind speed, which may affect the estimation of the OT.
- (5)
- Insufficient consideration of substrate type and environmental factors: Different water quality conditions, seawater depths, and marine substrate types have different effects on the reflectance spectra. The size of the plastic tank used in this experiment is limited, and the experimental environment is relatively ideal, which is significantly different from the real ocean boundary conditions. This directly affects the effectiveness of the experimental results in real marine applications.
- (6)
- There is still significant room for improvement in terms of the practical applications of airborne sensors: Although unmanned aerial sensors have the advantage of maneuverability and flexibility, their single strip imaging width is currently limited by the sensor’s field-of-view angle and flight altitude. Furthermore, their endurance and storage capacity can also impact the practical application.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shi, J.; Jiao, J.N.; Lu, Y.C.; Zhang, M.W.; Mao, Z.H.; Liu, Y.X. Determining spectral groups to distinguish oil emulsions from Sargassum over the Gulf of Mexico using an airborne imaging spectrometer. ISPRS J. Photog. Remote Sens. 2018, 146, 251–259. [Google Scholar] [CrossRef]
- Lu, Y.C.; Shi, J.; Wen, Y.S.; Hu, C.M.; Zhou, Y.; Sun, S.J.; Zhang, M.W.; Mao, Z.H.; Liu, Y.X. Optical interpretation of oil emulsions in the ocean—Part I: Laboratory measurements and proof-of-concept with AVIRIS observations. Remote Sens. Environ. 2019, 230, 111183. [Google Scholar] [CrossRef]
- National Research Council. Oil in the Sea III-Inputs, Fates and Effects; National Academic Press: Washington, DC, USA, 2003. [Google Scholar]
- Sun, S.J.; Hu, C.M.; Garcia-Pineda, O.; Kourafalou, V.; Le Henaff, M.; Androulidakis, Y. Remote sensing assessment of oil spills near a damaged platform in the Gulf of Mexico. Mar. Pollut. Bull. 2018, 136, 141–151. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.J.; Lu, Y.C.; Liu, Y.X.; Wang, M.Q.; Hu, C.M. Tracking an oil tanker collision and spilled oils in the East China Sea using multisensor day and night satellite imagery. Geophys. Res. Lett. 2018, 45, 3212–3220. [Google Scholar] [CrossRef]
- Yin, L.P.; Zhang, M.; Zhang, Y.L.; Qiao, F.L. The long-term prediction of the oil-contaminated water from the Sanchi collision in the East China Sea. Acta Oceanol. Sin. 2018, 37, 69–72. [Google Scholar] [CrossRef]
- Yang, J.F.; Wan, J.H.; Ma, Y.; Zhang, J.; Hu, Y.B.; Jiang, Z.C. Oil spill hyperspectral remote sensing detection based on DCNN with multi-scale features. J. Coast. Res. 2019, 90, 332–339. [Google Scholar] [CrossRef]
- Rajendran, S.; Vethamony, P.; Sadooni, F.N.; Al-Kuwari, H.A.; Al-Khayat, J.A.; Govil, H.; Nasir, S. Sentinel-2 image transformation methods for mapping oil spill—A case study with Wakashio oil spill in the Indian Ocean, off Mauritius. MethodsX 2021, 8, 101327. [Google Scholar] [CrossRef]
- Moura, N.V.A.; Carvalho, O.L.F.; Gomes, R.A.T.; Guimaraes, R.F.; Junior, O.A.C. Deep-water oil-spill monitoring and recurrence analysis in the Brazilian territory using Sentinel-1 time series and deep learning. Int. J. Appl. Earth Observ. Geoinf. 2022, 107, 102695. [Google Scholar] [CrossRef]
- Yang, J.F.; Ma, Y.; Hu, Y.B.; Jiang, Z.C.; Zhang, J.; Wan, J.H.; Li, Z.W. Decision fusion of deep learning and shallow learning for marine oil spill detection. Remote Sens. 2022, 14, 666. [Google Scholar] [CrossRef]
- Lu, Y.C.; Tian, Q.J.; Qi, X.P.; Wang, J.J.; Wang, X.C. Spectral response analysis of offshore thin oil slicks. J. Spectros. Spect. Anal. 2009, 29, 986–989. [Google Scholar]
- Fan, S.A.; Huang, X.X.; Yin, D.Y.; Xu, C.; Feng, X.; Feng, Q. Research of the ultraviolet reflectivity characteristic of simulative targets of oil spill on the ocean. J. Spectros. Spect. Anal. 2010, 30, 738–742. [Google Scholar]
- Suo, Z.Y.; Lu, Y.C.; Liu, J.Q.; Ding, J.; Yin, D.Y.; Xu, F.F.; Jiao, J.N. Ultraviolet remote sensing of marine oil spills: A new approach of HaiYang-1C satellite. Opt. Exp. 2021, 29, 13486–13495. [Google Scholar] [CrossRef] [PubMed]
- Carolis, G.D.; Adamo, M.; Pasquariello, G. On the estimation of thickness of marine oil slicks from sun-glittered, near-infrared MERIS and MODIS imagery: The Lebanon oil spill case study. IEEE Trans. Geosci. Remote Sens. 2014, 52, 559–573. [Google Scholar] [CrossRef]
- Sun, S.J.; Hu, C.M.; Feng, L.; Swayze, G.A.; Holmes, J.; Graettinger, G.; MacDonald, I.; Garcia, O.; Leifer, I. Oil slick morphology derived from AVIRIS measurements of the Deepwater Horizon oil spill: Implications for spatial resolution requirements of remote sensors. Mar. Pollut. Bull. 2016, 103, 276–285. [Google Scholar] [CrossRef]
- Hu, C.M.; Feng, L.; Holmes, J.; Swayze, G.A.; Leifer, I.; Melton, C.; Garcia, O.; MacDonald, I.; Hess, M.; Muller, F.; et al. Remote sensing estimation of surface oil volume during the 2010 Deepwater Horizon oil blowout in the Gulf of Mexico: Scaling up AVIRIS observations with MODIS measurements. J. Appl. Remote Sens. 2018, 12, 026008. [Google Scholar] [CrossRef]
- Wettle, M.; Daniel, P.J.; Logan, G.A.; Thankappan, M. Assessing the effect of hydrocarbon oil type and thickness on a remote sensing signal: A sensitivity study based on the optical properties of two different oil types and the HYMAP and Quickbird sensors. Remote Sens. Environ. 2009, 113, 2000–2010. [Google Scholar] [CrossRef]
- Yang, J.F.; Wan, J.H.; Ma, Y.; Zhang, J.; Hu, Y.B. Characterization analysis and identification of common marine oil spill types using hyperspectral remote sensing. Int. J. Remote Sens. 2020, 41, 7163–7185. [Google Scholar] [CrossRef]
- Jiang, Z.C.; Zhang, J.; Ma, Y.; Mao, X.P. Hyperspectral remote sensing detection of marine oil spills using an adaptive long-term moment estimation optimizer. Remote Sens. 2021, 141, 157. [Google Scholar] [CrossRef]
- Wang, J.; Li, Z.W.; Yang, J.F.; Liu, S.W.; Zhang, J.; Li, S.B. A multilevel spatial and spectral feature extraction network for marine oil spill monitoring using airborne hyperspectral image. Remote Sens. 2023, 15, 1302. [Google Scholar] [CrossRef]
- Lu, Y.C.; Tian, Q.J.; Wang, X.Y.; Zheng, G.; Li, X. Determining oil slick thickness using hyperspectral remote sensing in the Bohai Sea of China. Int. J. Dig. Earth 2013, 6, 76–93. [Google Scholar] [CrossRef]
- Svejkovsky, J.; Hess, M.; Muskat, J.; Nedwed, T.J.; Mccall, J.; Garcia, O. Characterization of surface oil thickness distribution patterns observed during the Deepwater Horizon (MC-252) oil spill with aerial and satellite remote sensing. Mar. Pollut. Bull. 2016, 110, 162–176. [Google Scholar] [CrossRef] [PubMed]
- Ren, G.B.; Guo, J.; Ma, Y.; Luo, X.D. Oil spill detection and slick thickness measurement via UAV hyperspectral imaging. Haiyang Xuebao 2019, 41, 146–158. [Google Scholar]
- Zhu, X.; Li, Y.; Zhang, Q.; Liu, B. Oil film classification using deep learning-based hyperspectral remote sensing technology. ISPRS Int. J. Geo-Inf. 2019, 8, 181. [Google Scholar] [CrossRef]
- Duan, P.H.; Lai, J.B.; Kang, J.; Kang, X.D.; Ghamisi, P.; Li, S.T. Texture-aware total variation-based removal of sun glint in hyperspectral images. ISPRS J. Photog. Remote Sens. 2020, 166, 359–372. [Google Scholar] [CrossRef]
- Hu, C.M.; Lu, Y.C.; Sun, S.J.; Liu, Y.X. Optical remote sensing of oil spills in the ocean: What is really possible? J. Remote Sens. 2021, 2021, 9141902. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 831, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Xiong, P.; Gu, X.F.; Yu, T.; Meng, Q.Y.; Li, J.G.; Shi, J.X.; Chen, Y.; Wang, L.; Liu, W.S.; Qi, Y.; et al. Thermal infrared emissivity spectrum and its characteristics of crude oil slick covered seawater. J. Spectros. Spect. Anal. 2014, 34, 2953–2960. [Google Scholar]
- Lu, Y.C.; Hu, C.M.; Sun, S.J.; Zhang, M.W.; Zhou, Y.; Shi, J.; Wen, Y.S. Overview of optical remote sensing of marine oil spills and hydrocarbon seepage. J. Remote Sens. 2016, 205, 1259–1269. [Google Scholar]
- Wang, M.Q.; Yang, J.F.; Liu, S.W.; Zhang, J.; Ma, Y.; Wan, J.H. Quantitative inversion ability analysis of oil film thickness using bright temperature difference based on thermal infrared remote sensing: A ground-based simulation experiment of marine oil spill. Remote Sens. 2023, 15, 2018. [Google Scholar] [CrossRef]
- Jiao, J.N.; Lu, Y.C.; Hu, C.M.; Shi, J.; Sun, S.J.; Liu, Y.X. Quantifying ocean surface oil thickness using thermal remote sensing. Remote Sens. Environ. 2021, 261, 112513. [Google Scholar] [CrossRef]
- Yang, J.F.; Hu, Y.B.; Zhang, J.; Ma, Y.; Li, Z.W.; Jiang, Z.C. Identification of marine oil spill pollution using hyperspectral combined with thermal infrared remote sensing. Front. Mar. Sci. 2023, 10, 1135356. [Google Scholar] [CrossRef]
- Hoge, F.E.; Swift, R.N. Oil film thickness measurement using airborne laser-induced water Raman backscatter. Appl. Opt. 1980, 19, 3269–3281. [Google Scholar] [CrossRef]
- Kepkay, P.E.; Bugden, J.B.C.; Lee, K.; Stoffyn, P. Application of ultraviolet fluorescence spectroscopy to monitor oil-mineral aggregate formation. Spill Sci. Technol. Bull. 2002, 8, 101–108. [Google Scholar] [CrossRef]
- Mdakane, L.W.; Kleynhans, W. Feature selection and classification of oil spill from vessels using sentinel-1 wide-swath synthetic aperture radar data. IEEE Geosci. Remote Sens. Lett. 2020, 19, 4002505. [Google Scholar] [CrossRef]
- Yekeen, S.T.; Balogun, A.L.; Yusof, K. A novel deep learning instance segmentation model for automated marine oil spill detection. ISPRS J. Photogram. Remote Sens. 2020, 167, 190–200. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, A.H.; Balzter, H.; Ren, P.; Zhou, H.Y. Oil spill SAR image segmentation via probability distribution modeling. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 15, 533–554. [Google Scholar] [CrossRef]
- Zhu, Q.Q.; Zhang, Y.N.; Li, Z.Q.; Yan, X.; Guan, Q.; Zhong, Y.; Zhang, L.; Li, D. Oil spill contextual and boundary-supervised detection network based on marine SAR images. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5213910. [Google Scholar] [CrossRef]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.X.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP deepwater horizon oil spill. Remote Sens. Environ. 2012, 1249, 185–209. [Google Scholar] [CrossRef]
- Fingas, M. The challenges of remotely measuring oil slick thickness. Remote Sens. 2018, 10, 319. [Google Scholar] [CrossRef]
- Sun, S.J.; Hu, C.M. The challenges of interpreting oil-water spatial and spectral contrasts for the estimation of oil thickness: Examples from satellite and airborne measurements of the deep water horizon oil spill. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2643–2658. [Google Scholar] [CrossRef]
- Bonn Agreement. Bonn Agreement Aerial Operations Handbook. 2009, p. 61. Available online: https://dokumen.tips/documents/aerial-surveillance-handbook.html?page=1 (accessed on 15 November 2023).
- Lu, Y.C.; Li, X.; Tian, Q.J.; Zheng, G.; Sun, S.J.; Liu, Y.X.; Yang, Q. Progress in marine oil spill optical remote sensing: Detected targets, spectral response characteristics, and theories. Mar. Geod. 2013, 36, 334–346. [Google Scholar] [CrossRef]
- Lu, Y.C.; Tian, Q.J.; Li, X. The remote sensing inversion theory of offshore oil slick thickness based on a two-beam interference model. Sci. China Earth Sci. 2011, 54, 678–685. [Google Scholar] [CrossRef]
- Jiang, Z.C.; Ma, Y.; Yang, J.F. Inversion of the thickness of crude oil film based on an OG-CNN model. J. Mar. Sci. Eng. 2020, 89, 653. [Google Scholar] [CrossRef]
- Yin, H.T.; Chen, S.H.; Huang, R.L.; Chang, H.; Liu, J.Y.; Qi, W.; He, Z.M.; Su, R.X. Real-time thickness measurement of marine oil spill by fiber-optic surface plasmon resonance sensors. Front. Mar. Sci. 2022, 8, 764970. [Google Scholar] [CrossRef]
- Lu, Y.C.; Zhan, W.; Hu, C.M. Detecting and quantifying oil slick thickness by thermal remote sensing: A ground-based experiment. Remote Sens. Environ. 2016, 181, 207–217. [Google Scholar] [CrossRef]
- Guo, G.; Liu, B.X.; Liu, C.Y. Thermal infrared spectral characteristics of bunker fuel oil to determine oil-film thickness and API. J. Mar. Sci. Eng. 2020, 82, 135. [Google Scholar] [CrossRef]
- Clark, R.N.; Swayze, G.A.; Leifer, I.; Livo, K.E.; Kokaly, R.F.; Hoefen, T.; Lundeen, S.; Eastwood, M.L.; Green, R.O.; Pearson, N.; et al. A method for quantitative mapping of thick oil spills using imaging spectroscopy. US Geol. Surv. Open-File Rep. 2010, 1167, 1–51. [Google Scholar]
- Lu, Y.C.; Shi, J.; Hu, C.M.; Zhang, M.W.; Sun, S.J.; Liu, Y.X. Optical interpretation of oil emulsions in the ocean—Part II: Applications to multi-band coarse-resolution imagery. Remote Sens. Environ. 2020, 242, 111778. [Google Scholar] [CrossRef]
- Lu, Y.C.; Liu, J.Q.; Ding, J.; Shi, J.; Chen, J.; Ye, X. Optical remote identification of spilled oils from the SANCHI oil tanker collision in the East China Sea. China Sci. Bull. 2019, 6431, 3213–3222. [Google Scholar]
- Wang, G.C.; Gao, C. Airborne ocean oil spill detection mission system. Indust. Technol. Innov. 2020, 7, 97–101. [Google Scholar]
- Mohammadi, M.; Sharifi, A.; Hosseingholizadeh, M.; Tariq, A. Detection of oil pollution using SAR and optical remote sensing imagery: A case study of the Persian Gulf. J. Indian Soc. Remote Sens. 2021, 49, 2377–2385. [Google Scholar] [CrossRef]
- Rajendran, S.; Vethamony, P.; Sadooni, F.N.; Al-Kuwari, H.A.; Al-Khayat, J.A.; Seegobin, V.O.; Govil, H.; Nasir, S. Detection of Wakashio oil spill off Mauritius using Sentinel-1 and 2 data: Capability of sensors, image transformation methods and mapping. Environ. Pollut. 2021, 274, 116618. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.F.; Xin, L.P.; Yu, B.; Ju, L.; Wei, L. A novel method for determination of the oil slick area based on visible and thermal infrared image fusion. Infrared Phys. Technol. 2021, 119, 103915. [Google Scholar] [CrossRef]
- Brereton, R.G.; Lloyd, G.R. Support Vector Machines for classification and regression. Analyst 2010, 135, 230–267. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2001, 2, 1–27. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Number | Thickness/μm | Sample Number | Thickness/μm | Sample Number | Thickness/μm |
|---|---|---|---|---|---|
| 1 | 0 | 7 | 300 | 13 | 900 |
| 2 | 10 | 8 | 400 | 14 | 1010 |
| 3 | 40 | 9 | 500 | 15 | 1500 |
| 4 | 70 | 10 | 610 | 16 | 2000 |
| 5 | 100 | 11 | 700 | 17 | 2510 |
| 6 | 200 | 12 | 800 | 18 | 3000 |
| Cubert S185 Hyperspectral Imager | Zenmuse H20T Thermal Infrared Imager | ||
|---|---|---|---|
| Parameter | Index | Parameter | Index |
| spectral range/nm | 450~950 | spectral range/μm | 8~14 |
| spectral resolution/nm | 8 | resolution | 640 × 512 |
| spatial resolution/cm | 2.7@10,000 | sensitivity (NETD)/mK | ≤50 @ f/1.0 |
| field of view angle/° | 20.6 | display field of view angle/° | 40.6 |
| specification/px2 | 1000 × 1000 | measuring range/°C | −20~+60 |
| sampling interval/nm | 4 | pixel spacing/μm | 12 |
| number of channels | 125 | aperture | f/1.0 |
| focal length/mm | 16 | focal length/mm | 13.5 |
| flight altitude in the experiment/m | 6 | flight altitude in the experiment/m | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Hu, Y.; Ma, Y.; Wang, M.; Zhang, N.; Li, Z.; Zhang, J. Combined Retrieval of Oil Film Thickness Using Hyperspectral and Thermal Infrared Remote Sensing. Remote Sens. 2023, 15, 5415. https://doi.org/10.3390/rs15225415
Yang J, Hu Y, Ma Y, Wang M, Zhang N, Li Z, Zhang J. Combined Retrieval of Oil Film Thickness Using Hyperspectral and Thermal Infrared Remote Sensing. Remote Sensing. 2023; 15(22):5415. https://doi.org/10.3390/rs15225415
Chicago/Turabian StyleYang, Junfang, Yabin Hu, Yi Ma, Meiqi Wang, Ning Zhang, Zhongwei Li, and Jie Zhang. 2023. "Combined Retrieval of Oil Film Thickness Using Hyperspectral and Thermal Infrared Remote Sensing" Remote Sensing 15, no. 22: 5415. https://doi.org/10.3390/rs15225415
APA StyleYang, J., Hu, Y., Ma, Y., Wang, M., Zhang, N., Li, Z., & Zhang, J. (2023). Combined Retrieval of Oil Film Thickness Using Hyperspectral and Thermal Infrared Remote Sensing. Remote Sensing, 15(22), 5415. https://doi.org/10.3390/rs15225415