
Motion Error Estimation and Compensation of Airborne Array Flexible SAR Based on Multi-Channel Interferometric Phase

Abstract
:1. Introduction
2. Theory
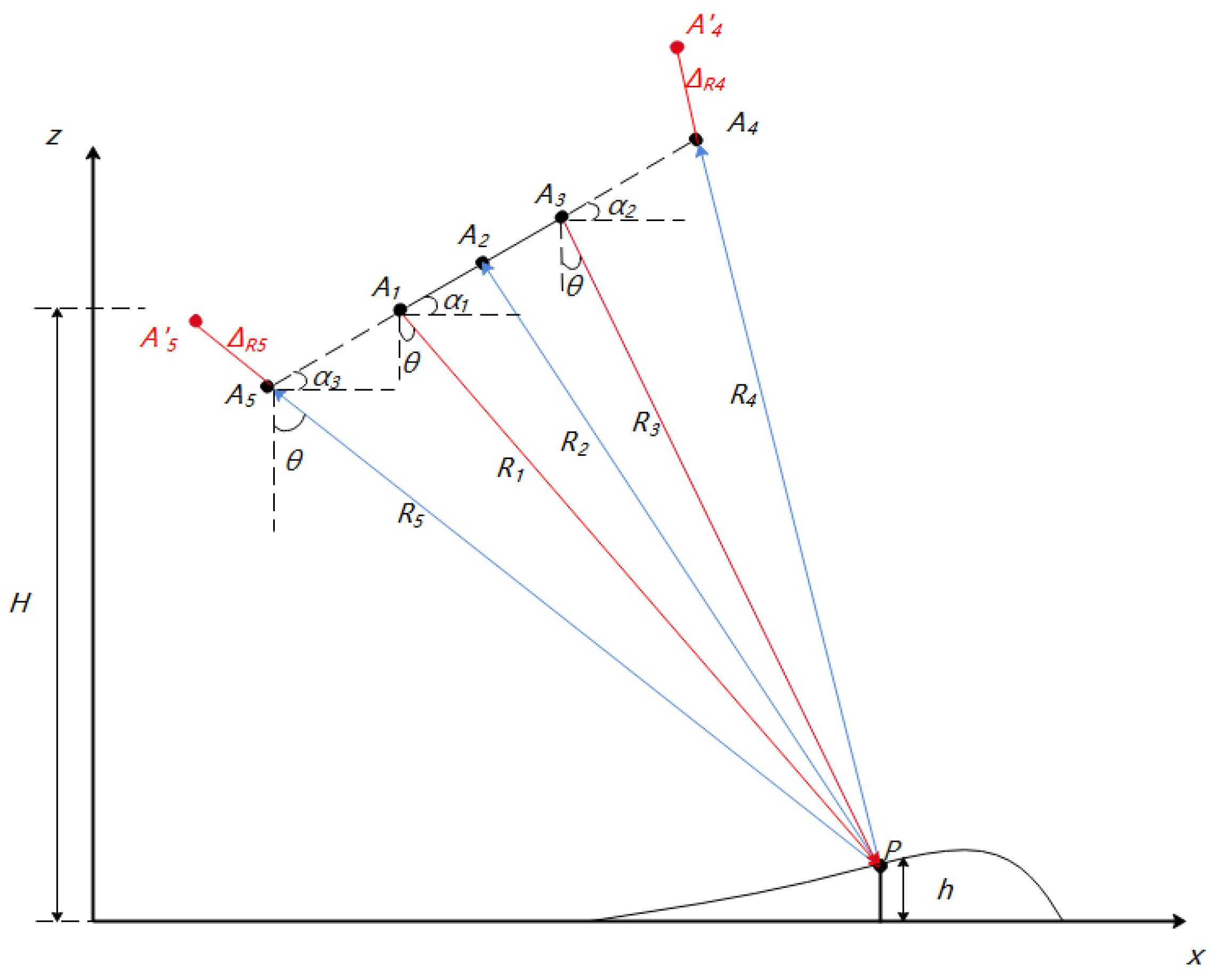
2.1. 3D Imaging Model and Motion Compensation Theory of Airborne Array Flexible SAR
2.2. Central Incidence Angle for Airborne Array Flexible SAR
2.3. Motion Error Calculation of Airborne Array Flexible SAR
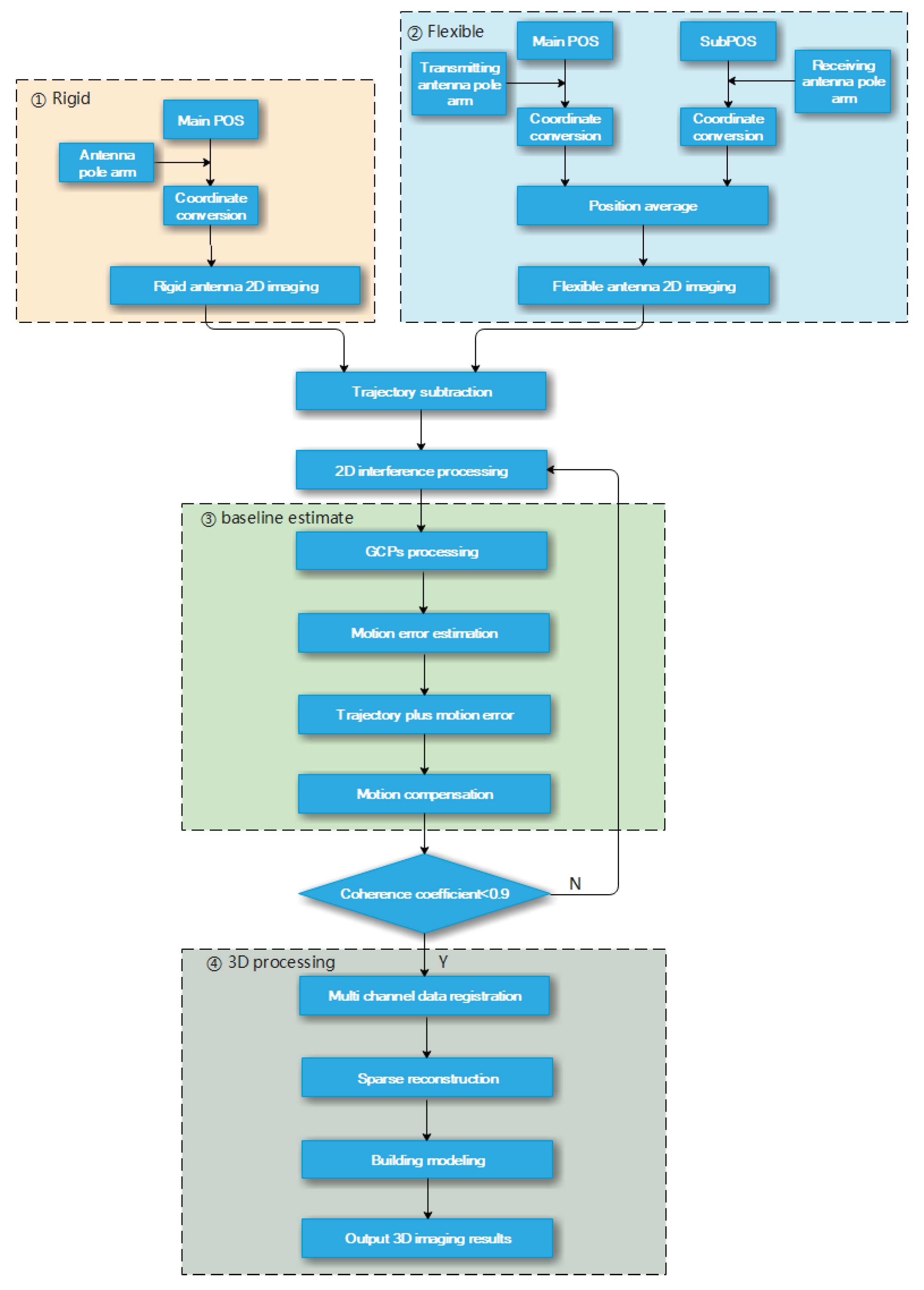
3. Method
- The rigid channel is imaged using traditional methods and calibrated by the method introduced in Section 2.2 in combination with the information from calibration points to obtain the central incidence angle under the scene;
- The flexible channel combines the distributed POS data for 2D imaging to obtain the tracking data before operation and compensation;
- Following the principle of flexible motion error estimation introduced in Section 2.3, the flexible motion error is estimated by combining the interferogram;
- According to the motion compensation principle introduced in Section 2.1, the flexible motion error is added to the original data before motion compensation;
- Two-dimensional imaging and interference processing are reperformed;
- Steps 2 to 6 are repeated until the coherence coefficient of the interferogram is greater than 0.9;
- Two-dimensional images with good a focusing effect, and multi-channel interferograms with improved interference performance, are obtained;
- The 3D result map of multichannel reconstruction is obtained through multi-channel registration, amplitude and phase correction, sparse reconstruction, and other steps.
| Algorithm 1 Iterative solution to array flexible SAR motion error. |
Input: Flexible channel data and rigid channel data . Initialization: Interference results , Step 1: Set 3 × 3 sliding window. Use the sliding window to obtain the interferogram result ; Step 2: Calculate according to the coherence coefficient calculation formula while the coherence coefficient r > 0.9; Step 3: Calculate the interference phase and the correlation coefficient of data3; Step 4: The maximum row m of the average value of the recorded azimuth correlation coefficient is the starting point; Step 5: Calculate the maximum deviation of the correlation coefficient between each azimuth and row m; Step 6: Calculate the distance to points corresponding to one wavelength; Step 7: Calculate the offset according to Section 2.3; Step 8: Calculate the deviation in distance and elevation directions in combination with the lower view angle calculated in Section 2.2; Step 9: Add the deviation back to the data before operation and compensation, and re-image; Step 10: Calculate the correlation coefficient r. end Output: Output the current compensation data . |
| Algorithm 2 Global optimization combined with least squares for the flexible baseline. |
Input: Flexible channel data and rigid channel data , POS information and , point target information height h, and geodetic coordinate y . Initialization: Interference results , and phase unwrapping results . Construct initial solution Step 1: Calculate Calculate Let Step 2: Find the least squares solution Calculate global optimal solution Step 3: Calculate Step 4: Obtain the central incidence angle from the Equation (10); Step 5: According to result, construct the minimization function from the Equation (9); Step 6: Perform global search until function F = 0. Output: Output , B and . |
4. System
5. Experimental Results and Analysis
5.1. Simulation Experiments
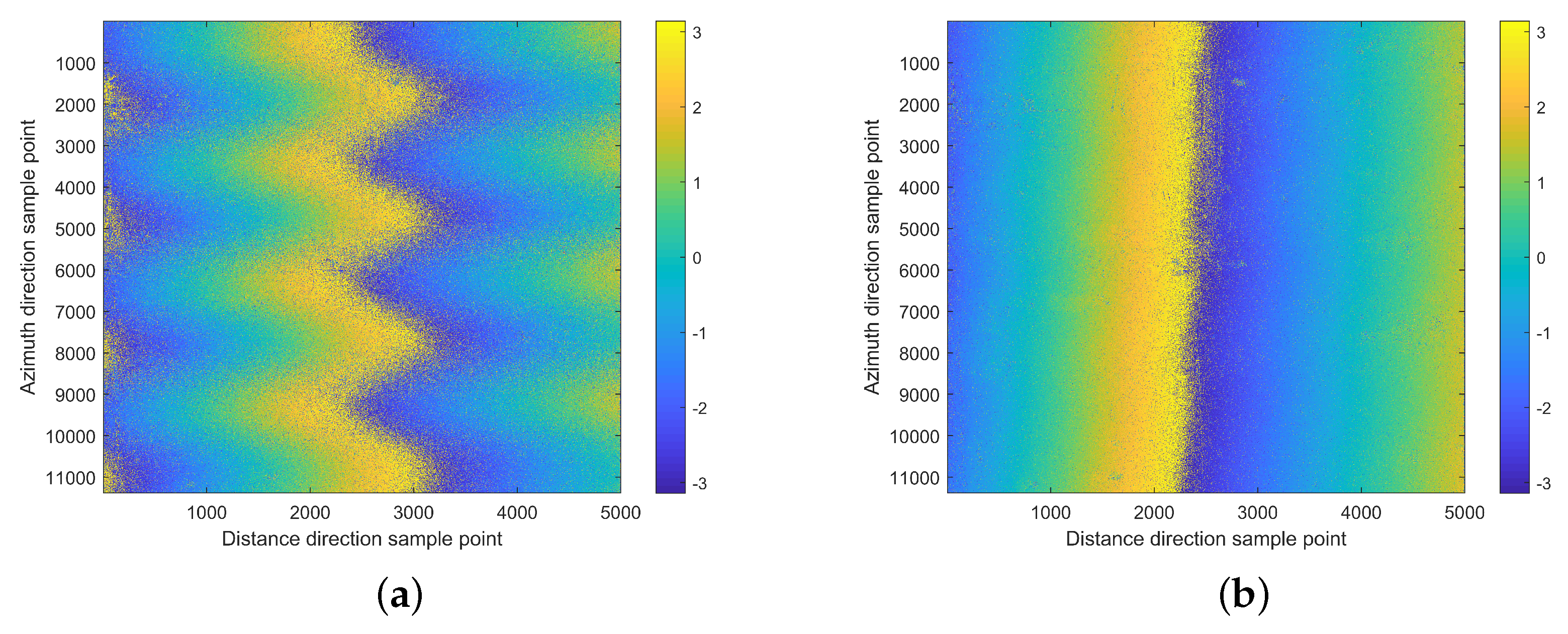
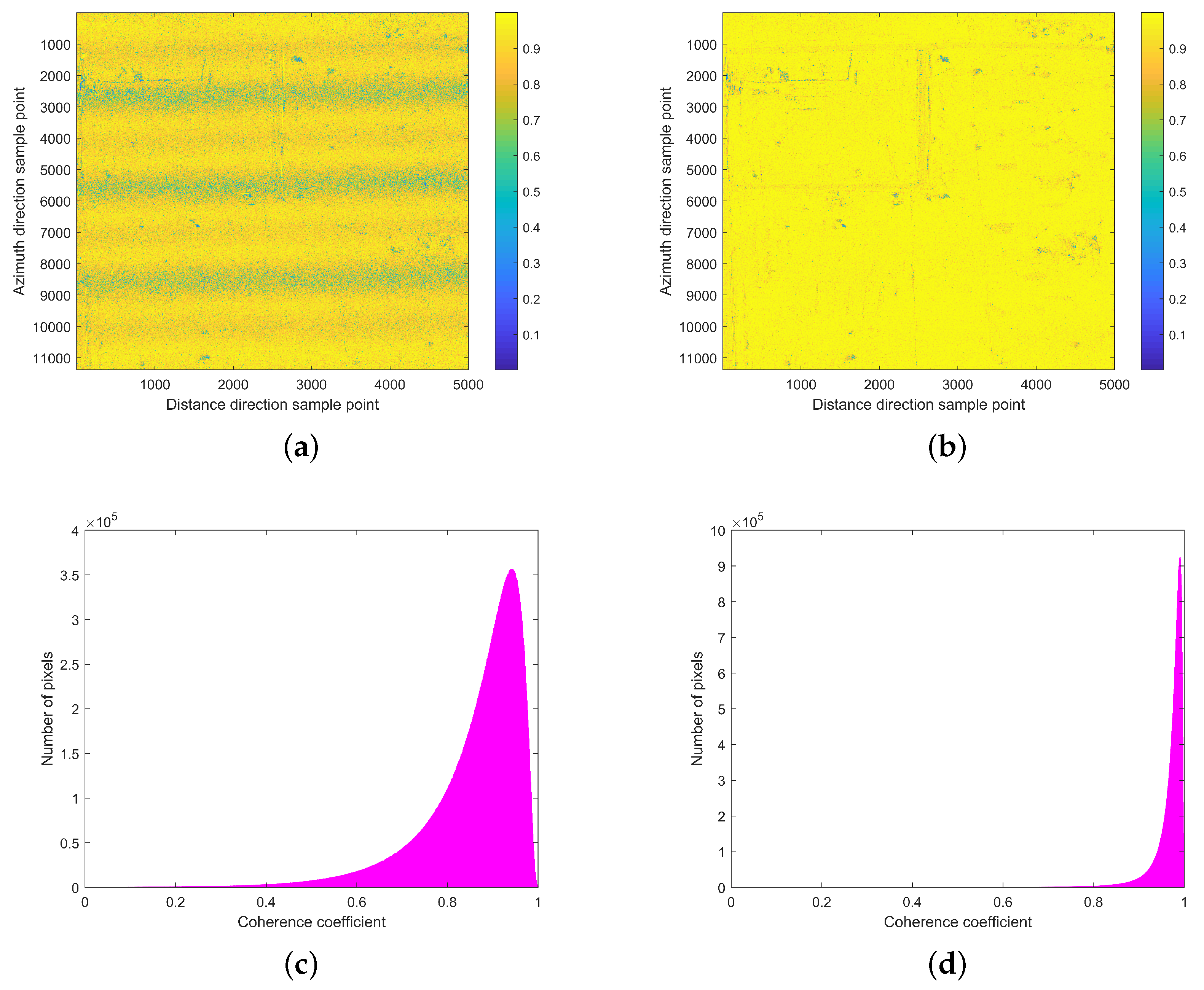
5.2. Real Data Experiments
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SAR | Synthetic Aperture Radar |
| 3D | Three-dimensional |
| DEM | Digital Elevation Model |
| ARTINO | Airborne Radar for Three-dimensional Imaging and Nadir Observation |
| SRTM | Shuttle Radar Topography Mission |
| AIRCAS | Aerospace Information Research Institute, Chinese Academy of Sciences |
| POS | Position and orientation system |
| LFM | Linear frequency modulation |
| 2D | Two-dimensional |
| ISLR | integral sidelobe ratio |
| PSLR | peak sidelobe ratio |
References
- Li, X.; Zhang, F.; Li, Y.; Guo, Q.; Wan, Y.; Bu, X.; Liu, Y.; Liang, X. An Elevation Ambiguity Resolution Method Based on Segmentation and Reorganization of TomoSAR Point Cloud in 3D Mountain Reconstruction. Remote Sens. 2021, 13, 5118. [Google Scholar] [CrossRef]
- Chai, H.; Lv, X.; Xiao, P. Deformation Monitoring Using Ground-Based Differential SAR Tomography. IEEE Geosci. Remote Sens. Lett. 2020, 17, 993–997. [Google Scholar] [CrossRef]
- Ho Tong Minh, D.; Hanssen, R.; Rocca, F. Radar Interferometry: 20 Years of Development in Time Series Techniques and Future Perspectives. Remote Sens. 2020, 12, 1364. [Google Scholar] [CrossRef]
- Cazcarra-Bes, V.; Tello-Alonso, M.; Fischer, R.; Heym, M.; Papathanassiou, K. Monitoring of Forest Structure Dynamics by Means of L-Band SAR Tomography. Remote Sens. 2017, 9, 1229. [Google Scholar] [CrossRef] [Green Version]
- Banda, F.; Dall, J.; Tebaldini, S. Single and Multipolarimetric P-Band SAR Tomography of Subsurface Ice Structure. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2832–2845. [Google Scholar] [CrossRef]
- Tebaldini, S.; Nagler, T.; Rott, H.; Heilig, A. Imaging the Internal Structure of an Alpine Glacier via L-Band Airborne SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7197–7209. [Google Scholar] [CrossRef]
- Frey, O.; Meier, E. 3-D Time-Domain SAR Imaging of a Forest Using Airborne Multibaseline Data at L- and P-Bands. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3660–3664. [Google Scholar] [CrossRef]
- Luo, H.; Li, Z.; Dong, Z.; Yu, A.; Zhu, X. Super-Resolved Multiple Scatterers Detection in SAR Tomography Based on Compressive Sensing Generalized Likelihood Ratio Test (CS-GLRT). Remote Sens. 2019, 11, 1930. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Bamler, R. Tomographic SAR Inversion by L1 -Norm Regularization—The Compressive Sensing Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3839–3846. [Google Scholar] [CrossRef] [Green Version]
- Aghababaee, H.; Ferraioli, G.; Schirinzi, G.; Pascazio, V. Regularization of SAR Tomography for 3-D Height Reconstruction in Urban Areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 648–659. [Google Scholar] [CrossRef]
- Klare, J.; Weiss, M.; Peters, O.; Brenner, A.; Ender, J. ARTINO: A New High Resolution 3D Imaging Radar System on an Autonomous Airborne Platform. In Proceedings of the 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 31 July–4 August 2006; pp. 3842–3845. [Google Scholar]
- Jordan, R.L.; Caro, E.R.; Kim, Y.; Kobrick, M.; Werner, M.U. Shuttle radar topography mapper (SRTM). In Proceedings of the Microwave Sensing and Synthetic Aperture Radar, Taormina, Italy, 23–27 September 1996; pp. 412–422. [Google Scholar]
- Fornaro, G. Trajectory deviations in airborne SAR: Analysis and compensation. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 997–1009. [Google Scholar] [CrossRef] [Green Version]
- Weiß, M.; Ender, J.H.G. A 3D imaging radar for small unmanned airplanes-ARTINO. In Proceedings of the European Radar Conference (EURAD 2005), Paris, France, 3–4 October 2005; pp. 209–212. [Google Scholar]
- Klare, J.; Cerutti-Maori, D.; Brenner, A.; Ender, J. Image quality analysis of the vibrating sparse MIMO antenna array of the airborne 3D imaging radar ARTINO. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 5310–5314. [Google Scholar]
- Reigber, A.; Prats, P.; Mallorqui, J. Refined estimation of time-varying baseline errors in airborne SAR interferometry. IEEE Geosci. Remote Sens. Lett. 2006, 3, 145–149. [Google Scholar] [CrossRef]
- Wang, H.; Fu, H.; Zhu, J.; Feng, G.; Yang, Z.; Wang, C.; Hu, J.; Yu, Y. Correction of Time-Varying Baseline Errors Based on Multibaseline Airborne Interferometric Data Without High-Precision DEMs. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9307–9318. [Google Scholar] [CrossRef]
- You, D.; Sun, G.C.; Xia, X.G.; Xing, M.; Li, Y.; Li, B.; Bao, Z. Time-Varying Baseline Error Estimation and Compensation in UAV SAR Interferometry Based on Time-Domain Subaperture of Raw Radar Data. IEEE Sens. J. 2020, 20, 12203–12216. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, J.; Fu, H.; Feng, G.; Wang, C. Modeling and Robust Estimation for the Residual Motion Error in Airborne SAR Interferometry. IEEE Geosci. Remote Sens. Lett. 2019, 16, 65–69. [Google Scholar] [CrossRef]
- Cao, N.; Lee, H.; Zaugg, E.; Shrestha, R.; Carter, W.E.; Glennie, C.; Lu, Z.; Yu, H. Estimation of Residual Motion Errors in Airborne SAR Interferometry Based on Time-Domain Backprojection and Multisquint Techniques. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2397–2407. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, B.; Ye, W.; Ning, X.; Gu, B. Global Estimation Method Based on Spatial–Temporal Kalman Filter for DPOS. IEEE Sens. J. 2021, 21, 3748–3756. [Google Scholar] [CrossRef]
- Franceschetti, G.; Iodice, A.; Maddaluno, S.; Riccio, D. Effect of antenna mast motion on X-SAR/SRTM performance. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2361–2372. [Google Scholar] [CrossRef]
- Wang, B.; Xiang, M.; Chen, L. Motion compensation on baseline oscillations for distributed array SAR by combining interferograms and inertial measurement. IET Radar Sonar Navig. 2017, 11, 1285–1291. [Google Scholar] [CrossRef]
- Gu, B.; Li, J.; Fang, J.; Yuan, X. Airborne Distributed POS Flexible Baseline Measurement Method Based on MCLS. IEEE Sens. J. 2019, 19, 2087–2095. [Google Scholar] [CrossRef]
- Sun, Y.; Gong, X.; Yang, L.; Wang, D.; Zhang, F. A Motion Information Acquisition Algorithm of Multiantenna SAR Installed on Flexible and Discontinuous Structure Based on Distributed POS. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Xiao, L.G.; Jian, X.Z. An innovative transfer alignment method based on federated filter for airborne distributed POS. Measurement 2014, 86, 165–181. [Google Scholar]
- Li, J.; Jia, L.; Gang, L. Multisensor Time Synchronization Error Modeling and Compensation Method for Distributed POS. IEEE Trans. Instrum. Meas. 2016, 11, 2637–2645. [Google Scholar]
- Xiao, L.G.; Ting, T.Q. An innovative distributed filter for airborne distributed position and orientation system. Aerosp. Sci. Technol. 2021, 119, 107155. [Google Scholar]
- Aghababaei, H.; Ferraioli, G.; Ferro-Famil, L.; Huang, Y.; Mariotti D’Alessandro, M.; Pascazio, V.; Schirinzi, G.; Tebaldini, S. Forest SAR Tomography: Principles and Applications. IEEE Geosci. Remote Sens. Mag. 2020, 8, 30–45. [Google Scholar] [CrossRef]
- Xiao, X.Z.; Adam, N.; Brcic, R.; Bamler, R. Space-borne high resolution SAR tomography: Experiments in urban environment using TS-X Data. In Proceedings of the Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009. [Google Scholar]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, F.; Qiao, M.; Chen, L. 3D Imaging Method of Airborne Array Flexible SAR Based on Distributed POS. Electron. Lett. 2022. preprint. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Flight height | H | 5 km |
| Center Frequency | 15 GHz | |
| Bandwidth | 500 MHz | |
| Rigid baseline length | 0.8 m | |
| Flexible baseline length | 1.6 m | |
| Flight velocity | v | 80 m/s |
| Horizontal inclination of baseline |
| Parameter | Main POS | Sub POS |
|---|---|---|
| Height measurement accuracy | 5 cm | 10 cm |
| Gyroscopic drift | 0.01°/h | 0.1°/h |
| Accelerometer bias | 10 g | 20 g |
| Method | Range | Azimuth | ||||
|---|---|---|---|---|---|---|
| Resolution (m) | PSLR (dB) | ISLR (dB) | Resolution (m) | PSLR (dB) | ISLR (dB) | |
| method 1 1 | 0.13 | −8.15 | −10.02 | 0.17 | −22.74 | −6.01 |
| method 2 2 | 0.13 | −8.26 | −10.67 | 0.17 | −22.49 | −10.23 |
| Method | Range | Azimuth | ||||
|---|---|---|---|---|---|---|
| Resolution (m) | PSLR (dB) | ISLR (dB) | Resolution (m) | PSLR (dB) | ISLR (dB) | |
| method 1 1 | 0.13 | −8.73 | −10.14 | 0.17 | −7.59 | −4.48 |
| method 2 2 | 0.13 | −8.98 | −10.17 | 0.17 | −3.61 | −1.89 |
| method 3 3 | 0.13 | −8.71 | −10.12 | 0.17 | −10.21 | −6.06 |
| method 4 4 | 0.13 | −8.93 | −10.13 | 0.17 | −13.45 | −8.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Zhang, F.; Sun, Y.; Chen, L.; Li, Z.; Wang, D. Motion Error Estimation and Compensation of Airborne Array Flexible SAR Based on Multi-Channel Interferometric Phase. Remote Sens. 2023, 15, 680. https://doi.org/10.3390/rs15030680
Yang L, Zhang F, Sun Y, Chen L, Li Z, Wang D. Motion Error Estimation and Compensation of Airborne Array Flexible SAR Based on Multi-Channel Interferometric Phase. Remote Sensing. 2023; 15(3):680. https://doi.org/10.3390/rs15030680
Chicago/Turabian StyleYang, Ling, Fubo Zhang, Yihong Sun, Longyong Chen, Zhenhua Li, and Dawei Wang. 2023. "Motion Error Estimation and Compensation of Airborne Array Flexible SAR Based on Multi-Channel Interferometric Phase" Remote Sensing 15, no. 3: 680. https://doi.org/10.3390/rs15030680
APA StyleYang, L., Zhang, F., Sun, Y., Chen, L., Li, Z., & Wang, D. (2023). Motion Error Estimation and Compensation of Airborne Array Flexible SAR Based on Multi-Channel Interferometric Phase. Remote Sensing, 15(3), 680. https://doi.org/10.3390/rs15030680